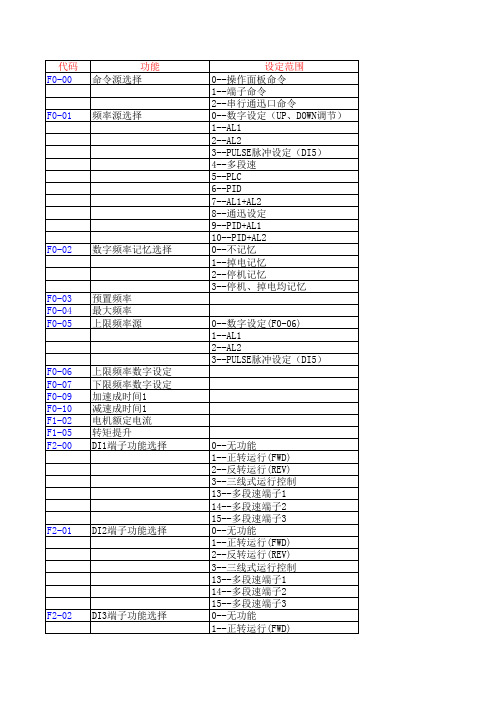
汇川500张力控制参数设置
汇川变频器参数
F8-00 F8-01 F8-02 F8-03 F8-04 F8-05 F8-06 F8-07 FA-00
多段速0 多段速1 多段速2 多段速3 多段速4 多段速5 多段速6 多段速7 波特率
1--600BPS 2--1200BPS 3--2400BPS 4--4800BPS 5--9600BPS 6--19200BPS
F0-03 F0-04 F0-05
预置频率 最大频率 上限频率源
0--数字设定(F0-06) 1--AL1 2--AL2 3--PULSE脉冲设定(DI5)
F0-06 F0-07 F0-09 F0-10 F1-02 F1-05 F2-00
上限频率数字设定 下限频率数字设定 加速成时间1 减速成时间1 电机额定电流 转矩提升 DI1端子功能选择
F2-01
ห้องสมุดไป่ตู้
DI2端子功能选择
F2-02
DI3端子功能选择
0--无功能 1--正转运行(FWD) 2--反转运行(REV) 3--三线式运行控制 13--多段速端子1 14--多段速端子2 15--多段速端子3 0--无功能 1--正转运行(FWD) 2--反转运行(REV) 3--三线式运行控制 13--多段速端子1 14--多段速端子2 15--多段速端子3 0--无功能 1--正转运行(FWD)
代码功能设定范围f000命令源选择0操作面板命令1端子命令2串行通迅口命令0数字设定updown调节1al12al23pulse脉冲设定di54多段速5plc6pid7al1al28通迅设定9pidal110pidal20不记忆1掉电记忆2停机记忆3停机掉电均记忆f001频率源选择f002数字频率记忆选择f003f004f005预置频率最大频率上限频率源0数字设定f0061al12al23pulse脉冲设定di5f006f007f009f010f102f105f200上限频率数字设定下限频率数字设定加速成时间1减速成时间1电机额定电流转矩提升di1端子功能选择0无功能1正转运行fwd2反转运行rev3三线式运行控制13多段速端子114多段速端子215多段速端子30无功能1正转运行fwd2反转运行rev3三线式运行控制13多段速端子114多段速端子215多段速端子30无功能1正转运行fwdf201di2端子功能选择f202di3端子功能选择2反转运行rev3三线式运行控制13多段速端子114多段速端子215多段速端子30无功能1正转运行fwd2反转运行rev3三线式运行控制13多段速端子114多段速端子215多段速端子30无功能1正转运行fwd2反转运行rev3三线式运行控制13多段速端子114多段速端子215多段速端子30两线式11两线式22三线式13三线式20减速停机1自由停机0运行时启动1上电后启动0功能码f801给定1al12al23pulse脉冲给定4pid5预置频率f003给定f203di4端子功能选择f204di5端子功能选择f206端子命令方式f410停机方式f538散热风扇控制f800多段速0给定方式f800f801f802f803f804f805f806f807fa00多段速0多段速1多段速2多段速3多段速4多段速5多段速6多段速7波特率1600bps21200bps32400bps44800bps59600bps619200bps738400bps02470为广播地址0无效验1偶效验2寄效验0无故障1保留2加速过电流err023减速过电流err034恒速过电流err045加速过电压err056减速过电压err067恒速过电压err078缓冲电阻过载故障err089欠压故障err0910变频过载err1011电机过载err1112输入缺相err1213输出缺相err1314模块过热err1415
汇川变频器说明书样本

资料内容仅供您学习参考,如有不半之处•请联系改正或者删除。
张力控制专用变频器MD330用户手册(ver: 060.13)资料内容仅供您学习参考,如有不、"|之处,请联系改正或者删除。
瓯 !干叱十本手册需与《MD320用户手册》配合使用。
本手册仅介绍与卷曲张力控 制有关的部分,其它的基本功能请参考《MD320用户手册》。
当张力控制模式选为无效时,变频器的功能与MD320完全相同。
MD330用于卷曲控制,能够自动计算卷径,在卷径变化时仍能够获得恒 张力效果。
在没有卷径变化的场合实现恒转矩控制,建议使用MD320变频 器。
选用张力控制模式后,变频器的输出频率和转矩由张力控制功能自动产 生,F0组中频率源的选择将不起作用。
第二章张力控制原理介绍典型收卷张力控制示意图II灯仝二.张力控制方案介绍对张力的控制有两个途径,一是可控制电机的输出转矩,二是控制电机转速,对应这两个途径,MD330设计了两种张力控制模式。
A.开环转矩控制模式开环是指没有张力反馈信号,变频器仅靠控制输出频率或转矩即可达到控制目的,与开环矢量或闭环矢量无关。
转矩控制模式是指变频器控制的是电机的转矩,而不是频率,输出频率杲跟随材料的速度自动变化。
根据公式F=T/R(其中F为材料张力,T为收卷轴的扭矩,R为收卷的半径),可看出,如果能根据卷径的变化调整收卷轴的转矩,就能够控制材料上的张力,这就是开环转矩模式控制张力的根据,其可行性还有一个原因是材料上的张力只来源于收卷轴的转矩,收卷轴的转矩主要作用于材料上。
MD系列变频器在闭环矢量(有速度传感器矢量控制)下能够准确地控制电机输出转矩,使用这种控制模式,必须加装编码器(变频器要配PG 卡)O与开环转矩模式有关的功能模块:1、张力设定部分:用以设定张力,实际使用中张力的设定值应与所用材料、卷曲成型的要求等实际情况相对应,需由使用者设定。
张力锥度能够控制张力随卷径增加而递减,用于改进收卷成型的效果。
汇川伺服参数调整PPT

时间
电机行程受按键控制,适合行程较长的场合
惯量辨识
(2)在线惯量辨识
不需要输入额外的指令,在伺服正常运行时即可进行惯量辨识,分为缓慢变 化、一般变化和快速变化3种模式,对应不同的负载惯量比更新速度。
配合上位机位置指令或内部位置指令,可在精确的位置限定下进行惯量辨识。
相关功能码:
H09 03 在线惯量辨识模式
结果、过程都关注!
Never Stop Improving
手动调整增益
定位过程的一些考核指标: (1)定位时间
指位置指令结束输入到输出位置指令到达信号的时间间隔, 是衡量定位的快慢的直接指标,最快1ms以内。
Never Stop Improving
手动调整增益
(2)过冲 在定位结束的过程中发生随动偏差正负的变化就是过冲,如下
H0824=50%,转速超调 定位时间20ms (有明显过冲)
H0824=100%,转速上升慢 定位时间162ms
Never Stop Improving
H0824=80%,转速跟踪良好! 定位时间89ms!
手动调整增益
(7)扰动转矩补偿增益和滤波时间(H0930和H0931): 检测机械系统的加速度,估算系统受到的扰动转矩,在转矩指
Never Stop Improving
手动调整增益
(3)速度环积分时间常数(H0801) 速度积分可以消除净差,积分时间常数越小,积分效果越强。但
是过小的积分时间常数会引起系统不稳定。
建议速度积分时间常数和速度比例满足以下关系: 默认速度环增益25.0Hz,默认积分时间常数31.83ms,25 × 31.83 ≈ 800,符合 上述关系。
惯量辨识
(5)只需给H0815设置大致的数值;
经验分享3:CS500快速调试手册

CS500快速调试手册1.电机自学习选择矢量控制运行方式,在变频器运行前,必须准确输入电机的铭牌参数,CS500变频器据此铭牌参数匹配标准电机参数;矢量控制方式对电机参数依赖性很强,要获得良好的控制性能,必须获得被控电机的准确参数。
电机参数自动调谐步骤如下:①将命令源(F0-02)选择为操作面板命令通道(将该参数设置为0)。
②请按电机实际参数(铭牌参数)输入下面的参数:参数名称 参数含义F1-01 电机额定功率F1-02 电机额定电压F1-03 电机额定电流F1-04 电机额定频率F1-05 电机额定转速③如果是电机可以和负载完全脱开,则F1-11请选择为2(动态自学习),动态自学习时如电机带制动器的必须保证制动器处于打开状态,这时操作面板会显示TUNE并闪烁,然后请按操作面板上的“RUN”键,大于1秒后电机将开始运行,自动进行电机学习;如果电机不可和负载完全脱开,则F1-11请选择为1(静态自学习),这时操作面板会显示TUNE并闪烁,然后请按操作面板上的“RUN”键,电机不会运行,开始自学习。
电机自学习将学习F1-06~F1-10这五个参数,这五个参数将在学习完毕后自动产生并显示出来。
动态学习将生成这五个参数,静态学习只能生成前三个参数,后两个是由变频器内部软件提供的推荐值。
因此现场有条件的话我们建议还是尽量选择动态自学习。
2.重要参数参数名称 参数含义 设定值 备注F1-10 空载电流 尽量进行完整自学习获取该参数。
若现场不具备完整自学习条件,则手动调节该参数:1A每千瓦以上比如:37Kw的电机设为37A以上F2-10 转矩上限 应尽量调至≥130% 设置过高则瞬间电流会很大,设置过低则重载起动时会拉不动F6-01 DSP优化选择 出厂值为0 出现如下情况把该参数设置为1:1.下放运行时转速起不来2.下放运行时电流输出达到转矩上限3.启动和停车时溜钩 F6-02 DSP优化增益 尽量调至≥50 该功能码设置越大重载启动出力越大、输出电流越大FA-06 制动闭合延时 一般设置为0.5S 和制动器类型有关3.其他涉及到基本运行的参数(一般情况下不需更改)参数名称 参数含义 出厂设定值 备注F0-01 控制方式 0 开环运行F0-02 命令源选择 1 端子运行F0-03 频率源选择 6 多段速设置参照(说明书F4和FC组参数)FA-02 正转抱闸释放电流条件 70% 正向运行开闸条件FA-03 反转抱闸释放电流条件 30% 反向运行开闸条件FA-04 制动释放延时1 0.5s 机械抱闸完全打开时间FA-05 制动闭合频率 2.00Hz 运行频率低于该功能码设定值后输出关抱闸指令FA-06 制动闭合延时1 0.5s 机械抱闸完全关闭时间FA-17 滑落防止频率 2.0Hz 低频阶段的维持频率FA-18 滑落防止时间 1.0s FA-17的维持时间FC-08 加速时间 10s 表示0Hz到50Hz所需时间 FC-09 减速时间 10s 表示50Hz到Hz0所需时间4.其他的一些显示功能帮助调试FA-34和FA-35:主要功能是能够通过操作面板的数码管显示来判断输入输出点是否有效、当前变频器运行在何种状态以及当前选择的速度等等信息。
汇川变频器D500说明书
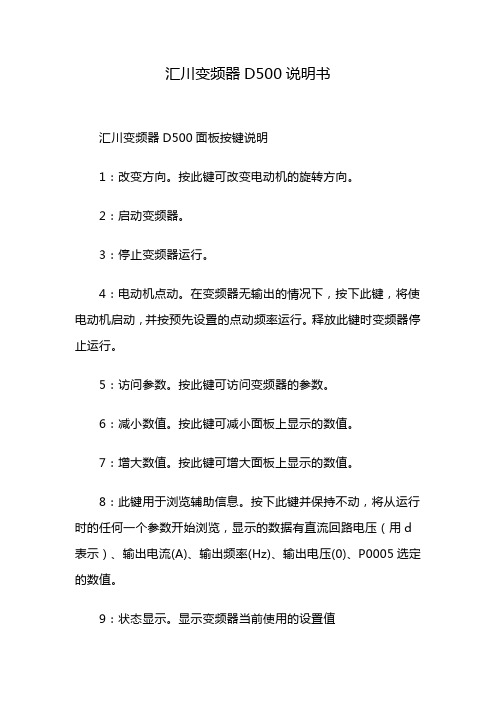
汇川变频器D500说明书
汇川变频器D500面板按键说明
1:改变方向。
按此键可改变电动机的旋转方向。
2:启动变频器。
3:停止变频器运行。
4:电动机点动。
在变频器无输出的情况下,按下此键,将使电动机启动,并按预先设置的点动频率运行。
释放此键时变频器停止运行。
5:访问参数。
按此键可访问变频器的参数。
6:减小数值。
按此键可减小面板上显示的数值。
7:增大数值。
按此键可增大面板上显示的数值。
8:此键用于浏览辅助信息。
按下此键并保持不动,将从运行时的任何一个参数开始浏览,显示的数据有直流回路电压(用d 表示)、输出电流(A)、输出频率(Hz)、输出电压(0)、P0005选定的数值。
9:状态显示。
显示变频器当前使用的设置值。
汇川伺服速度模式控制参数

汇川伺服速度模式控制参数【原创实用版】目录1.汇川伺服驱动器概述2.汇川伺服速度控制模式3.汇川伺服加减速时间参数4.汇川伺服转矩模式原理5.一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用正文一、汇川伺服驱动器概述汇川伺服驱动器是一种高性能的电机驱动设备,能够精确控制电机的速度、转矩和位置。
它具有优秀的性能、稳定的可靠性和便捷的操控性,广泛应用于各种工业自动化领域。
二、汇川伺服速度控制模式汇川伺服驱动器支持多种速度控制模式,包括速度模式、转矩模式和位置模式。
其中,速度控制模式是最常用的一种控制方式。
通过设置目标速度和加减速时间,可以实现对电机速度的精确控制。
三、汇川伺服加减速时间参数在汇川伺服速度控制模式下,可以通过调整加减速时间参数来改变电机的加速和减速过程。
加减速时间参数是通用的参数,可以灵活调整,以满足不同应用场景的需求。
四、汇川伺服转矩模式原理汇川伺服转矩模式是一种基于电机转矩控制的模式。
通过设置目标转矩和转矩限制,可以实现对电机转矩的精确控制。
在转矩模式下,驱动器会根据目标转矩和实际转矩之间的差值自动调整电机的输出功率,确保电机始终在工作范围内运行。
五、一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用内容介绍了一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用方式和方法。
通过在汇川 h5uplc 上配置相应的参数和程序,可以实现对一体化低压伺服 ethercat 通信的电机的精确控制。
综上所述,汇川伺服驱动器作为一种高性能的电机驱动设备,能够实现对电机速度、转矩和位置的精确控制。
通过调整速度控制模式下的加减速时间参数,可以满足不同应用场景的需求。
汇川+MD330(张力控制专用变频器)用户手册
根据公式 F=T/R(其中 F 为材料张力,T 为收卷轴的扭矩,R 为收卷的半径), 可看出,如果能根据卷径的变化调整收卷轴的转矩,就可以控制材料上的张力, 这就是开环转矩模式控制张力的根据,其可行性还有一个原因是材料上的张力 只来源于收卷轴的转矩,收卷轴的转矩主要作用于材料上。
卷径计算方法选 2:AI1输入
FH-10
择
3:AI2输入
1
0
×
4:AI3输入
5:PULSE输入
FH-11 最大卷径
1mm~10000mm
1
500
×
FH-12 卷轴直径
1mm~10000mm
1
100
×
0:FH-12~FH-15设定
FH-13 初始卷径源
1:AI1设定 2:AI2设定
1
0
×
3:AI3设定
张力控制专用变频器
MD330 用户手册
VER:0
目录
第一章 概述..................................................1 第二章 张力控制原理介绍 ......................................2
2.1 典型收卷张力控制示意图 ............................ 2 2.2 张力控制方案介绍 ..................................3 第三章 功能参数表 ............................................6 第四章 参数说明..........................................................................................12 4.1 控制模式选择部分 .................................12 4.2 张力设定部分: ...................................14 4.3 卷径计算部分 .....................................15 4.4 线速度输入部分 ...................................18 4.5 张力补偿部分 .....................................19 4.6 PID 参数..........................................21 4.7 自动换卷参数 .....................................22 4.8 增补部分参数 .....................................23
汇川+MD330(张力控制专用变频器)用户手册
3)转矩补偿部分:电机的输出转矩在加减速时有一部分要用来克服收(放) 卷辊的转动惯量,变频器中关于惯量补偿部分可以通过适当的参数设置自动地 根据加减速速率进行转矩补偿,使系统在加减速过程中仍获得稳定的张力。摩
2第二章张力控制原理介绍第二章张力控制原理介绍21典型收卷张力控制示意图21典型收卷张力控制示意图浮动辊f牵引辊收卷图2带浮动辊张力反馈收卷f牵引辊图1无张力反馈322张力控制方案介绍22张力控制方案介绍对张力的控制有两个途径一是可控制电机的输出转矩二是控制电机转速对应这两个途径md330设计了两种张力控制模式
FH-31
FH-32
FH-33 FH-34 FH-35
材料厚度0
0.01mm~100.00mm
0.01mm 0.01mm ○
材料厚度1
0.01mm~100.00mm
0.01mm 0.01mm ○
材料厚度2
0.01mm~100.00mm
0.01mm 0.01mm ○
材料厚度3
0.01mm~100.00mm
0.01mm 0.01mm ○
最大厚度
0.01mm~100.00mm
0.01mm 1.00mm ○
线速度输入部分
0:无输入
1:AI1
线速度输入源
2:AI2 3:AI3
1
0
○
4:PULSE输入
5:通讯设定
最大线速度
0.10m/Min~6500.0m/Min 0.1m/Min 1000.0m/Min ○
MD 系列变频器在闭环矢量(有速度传感器矢量控制)下可以准确地控制电 机输出转矩,使用这种控制模式,必须加装编码器(变频器要配 PG 卡)。 2、与开环转矩模式有关的功能模块:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汇川500张力控制参数设置
1. 引言
汇川500张力控制参数设置是指对汇川500型张力控制系统进行参数配置,以实现对张力的精确控制。
本文将介绍汇川500张力控制系统的工作原理、参数设置的重要性以及详细的参数设置步骤。
2. 工作原理
汇川500张力控制系统采用闭环控制的原理,通过传感器实时监测张力信号,并通过控制器对张力进行调节。
控制器根据预设的参数设置,计算出控制信号,通过执行机构对张力进行调整,以实现对张力的精确控制。
3. 参数设置的重要性
合理的参数设置对于汇川500张力控制系统的稳定性和控制精度至关重要。
正确设置参数可以提高系统的响应速度、抗干扰能力和控制精度,从而确保生产过程的稳定性和产品质量的一致性。
4. 参数设置步骤
4.1 确定控制对象
首先需要确定需要控制的张力对象,例如纸张、织物或金属带等。
不同的控制对象可能需要不同的参数设置。
4.2 选择传感器
根据控制对象的特点和要求,选择合适的张力传感器。
传感器的精度和响应速度决定了系统的控制精度和动态性能。
4.3 设置控制器参数
根据传感器的输出信号和控制要求,设置控制器的参数。
主要包括比例增益、积分时间和微分时间等参数。
不同的参数设置会影响系统的控制性能和稳定性。
4.4 调整控制信号输出
根据实际情况,通过调整控制信号的输出范围和曲线,使其与实际张力需求相匹配。
这可以通过设置输出限制、增益补偿和曲线修正等方式来实现。
4.5 验证参数设置
在参数设置完成后,需要进行验证实验来评估系统的控制性能和稳定性。
可以通过模拟实际工作条件,观察系统的响应速度、稳定性和控制精度等指标。
4.6 优化参数设置
根据验证实验的结果,对参数进行优化调整。
可以通过试错法、经验法或系统辨识等方法来优化参数设置,以提高系统的控制性能和稳定性。
5. 总结
汇川500张力控制参数设置是实现对张力精确控制的关键步骤。
本文介绍了汇川500张力控制系统的工作原理、参数设置的重要性以及详细的参数设置步骤。
合理的参数设置可以提高系统的控制性能和稳定性,确保生产过程的稳定性和产品质量的一致性。
通过不断优化参数设置,可以进一步提高系统的控制精度和响应速度,满足不同张力控制需求。
参考文献: - 张力控制系统参数设置与优化方法研究,XXX,XXX,XXX - 张力控制系统设计及其参数在线调整方法研究,XXX,XXX,XXX。