基于单目图像的人脸深度估计
利用深度传感器大数据的单目图像深度估计

Ab s t r a c t :2 D— t o 一 3D c o nv e r s i o n i s on e wa y t o a l l e v i a t e t h e l a c k o f 3 D— TV p r o gr a m ma t e r i a 1 . Th e mo s t
最 后 通 过 三 边 滤 波 对 融 合 的深 度 图进 行 后 处 理 , 进 一 步 提 高 深 度 图估 计 质 量 并 抑 制 噪 声 . 实验结 果表 明, 与 基 于 尺 度不变特征变换流深度迁移方法 相比 , 该 方 法 在 改 善 深 度 图估 计 质量 的 同 时 提 高 了计 算 速 度 . 关 键 词 :尺 度 不 变 特 征 变 换 流 ; 深度传感 器 ; P a t c h Ma t c h ; 深度迁 移 ; 深 度 估 计
( S c h o o l o f E l e c t r o n a n d I n f o r ma t i o n E n g i n e e r i n g,Ni n g b o U n i v e r s i t y f o T e c h n o l o g y, Ni n g b o 3 1 5 0 1 6 )
mon oc ul a r i ma g e .Thi s p a pe r p r op o s e s a Pa t c h Ma t c h d e p t h t r a n s f e r me t ho d o f d e p t h e s t i ma t i on f r o m a mo no c u l a r i ma g e f o r 2D— t o 一 3 D c o nv e r s i on ba s e d o n RGBD da t a f r o m i nt e r ne t . Fi r s t ,t he p r op o s e d
单目深度估计 商用案例
单目深度估计商用案例
单目深度估计(Monocular depth estimation)是一种从单个图像中推断
深度信息的技术。
由于其具有成本低、设备简单等优势,单目深度估计在许多商用场景中都有广泛的应用。
以下是一些单目深度估计的商用案例:
1. 自动驾驶:自动驾驶汽车需要精确的深度信息来理解周围环境并做出决策。
单目深度估计可以为自动驾驶系统提供实时、低成本的深度信息,帮助车辆识别障碍物、道路标记和交通信号等。
2. 机器人导航:在工厂、仓库和家庭等环境中,机器人需要精确的深度信息来识别障碍物并进行避障。
单目深度估计可以为机器人提供实时的深度感知能力,提高其导航和操作的准确性。
3. 增强现实:增强现实技术可以将虚拟内容与现实世界相结合,为用户提供更加丰富的交互体验。
单目深度估计可以为增强现实应用提供精确的深度信息,使得虚拟内容能够更加自然地融入现实场景。
4. 安全监控:在安全监控领域,单目深度估计可以帮助监控系统识别出运动物体的距离和速度,提高监控的准确性和实时性。
5. 虚拟现实和游戏:在虚拟现实和游戏中,单目深度估计可以为用户提供更加真实的沉浸式体验。
通过精确的深度信息,游戏和虚拟现实场景中的物体可以呈现出更加逼真的透视效果。
以上案例只是单目深度估计在商用领域的一部分应用,随着技术的不断发展和成本的降低,相信未来会有更多的商业场景会应用到单目深度估计技术。
计算机视觉中的单目深度估计技术研究
计算机视觉中的单目深度估计技术研究随着计算机视觉领域的不断发展和进步,单目深度估计技术也越来越成熟,正在成为计算机视觉领域中的一个重要的研究方向。
单目深度估计是指利用单目视觉信息,估计场景中物体的深度信息。
本文将对单目深度估计技术进行详细的介绍和分析。
一、单目深度估计的背景和意义对于计算机视觉来说,物体的三维信息对于场景理解和后续任务的执行是非常重要的。
例如,对于自动驾驶来说,深度信息可以帮助车辆控制系统感知到前方的交通信号和路标等信息,从而更加精准地进行驾驶决策。
而对于机器人来说,深度信息则可以帮助机器人掌握周围环境的结构信息,从而更加高效地执行特定的任务。
在过去,人们通常使用双目或者多目摄像头来进行深度估计。
但是,这种方案需要使用多个摄像头,需要专门的硬件设备,造成了成本和复杂度的增加。
而单目深度估计则可以单独利用一个摄像头来进行,更加方便和实用。
二、单目深度估计的方法(一)传统方法传统的单目深度估计方法通常基于基础矩阵或者本质矩阵来进行,利用摄像头在不同位置所拍摄的图像来计算物体的深度信息。
该方法通常使用多个图像来进行计算,也就意味着计算成本较高。
而且需要对相机参数进行精确的标定,才可以保证计算出的结果准确可靠。
(二)深度学习方法随着深度学习技术的不断发展和进步,深度学习方法在单目深度估计中也开始得到广泛的应用。
深度学习方法可以将大量的图片数据输入到模型中进行训练,可以学习到更丰富和准确的特征信息,从而得到更加精准的深度估计结果。
其中,常用的深度学习方法包括:1. 单幅图像深度估计(Single Image Depth Estimation,SIREN)SIREN是一种基于深度学习的单幅图像深度估计方法。
该方法通过使用卷积神经网络(CNN)来学习输入图像的特征信息,并利用回归模型来估计物体的深度信息。
该方法通常使用图像自编码器来进行训练,可以避免过拟合的问题,得到更加准确和鲁棒的结果。
2. 基于立体匹配的深度估计方法基于立体匹配的深度估计方法是一种用于立体图像的深度估计算法。
leia的单目深度估计算法
leia的单目深度估计算法
Leia是一个单目深度估计算法,旨在从单个图像中推断场景中物体的深度信息。
该算法通过利用卷积神经网络(CNN)和
传统计算机视觉技术实现深度估计。
Leia算法的主要步骤包括:
1. 数据准备:收集并标注带有深度信息的图像数据集作为训练集。
2. 网络设计:设计一个CNN网络结构,该网络接受单目图像
作为输入,并输出每个像素的深度估计值。
3. 训练:使用训练集对CNN网络进行训练,通过最小化深度
估计值与真实深度的误差来优化网络参数。
4. 测试:使用测试集对训练好的网络进行评估,并计算深度估计的准确性。
5. 后处理:对深度估计结果进行后处理,如去噪、光照校正等,以提高估计结果的质量。
6. 应用:将深度估计结果应用于相关的计算机视觉任务,如虚拟增强现实、自动驾驶等。
Leia算法的优势在于可以实现从单个图像中估计深度,而不需要额外的传感器或摄像头。
这对于一些实际应用中有限的资源和环境要求非常有益。
然而,由于单目深度估计问题本身的挑战性,Leia算法的深度估计精度可能受到一定的限制。
为了进一步提高性能,该算法可以与其他技术如立体视觉、光流估计等进行结合。
基于单目深度估计方法的图像分层虚化技术

摘要:实现了一种基于单目深度估计方法的图像分层虚化技术:首先对图像等比例缩小并且对图像中的物体做边 缘检测,利用线性追踪生成线条扫描信息图,利用双边滤波器对初始深度图做平滑处理得到深度图,依据深度信息 选择阈值将图像分层,在分层的基础上对图像背景做高斯模糊处理,最终得到图像分层虚化效果,增强了图像的表 现力和艺术效果.本技术的实现效果较为理想,可使前景清晰背景模糊,离镜头越远虚化效果越明显. 关键词:单目图像;深度信息;图像分层;背景虚化 中图分类号:TP311 文献标志码:A 文章编号:1000-5463(2018)01-0124-05
HierarchicalImageBlurringTechnologyBasedonMonocularDepthEstimationMethod
LIXiaoying,ZHOUWeixing ,WUSunjin,LIDan,HUXiaohui
(SchoolofPhysicsandTelecommunicationEngineering,SouthChinaNormalUniversity,Guangzhou510006,China)
Sobel边缘检测算子在技术上是一个离散性差
Abstract:Amethodoflayeredimagevirtualizationbasedonmonoculardepthestimationisproposed.Firstofall, theimageisreducedinproportion,andtheedgesofobjectsintheimagearedetected,andgeneratinglinescanin formationmapusinglineartracing.Adepthmapisobtainedbysmoothingtheinitialdepthmapwithabilateralfil ter.Theimagebackgroundislayeredaccordingtothedepthinformationofimage.TheGaussfuzzyprocessingis doneinthelayeredtoobtain,thefinalimagelayeredvirtualeffect,whichenhancestheimageexpressionandartis ticeffect.Theeffectofthistechnologyisideal,anditcanmaketheforegroundclearandthebackgroundblurred. Whenitisfartherawayfrom thelens,itismoreobviousfortheeffectofvirtualization. Keywords:monocularimage;depthinformation;imageseparation;backgroundblurring
kitti数据集单目深度估计评估指标python代码
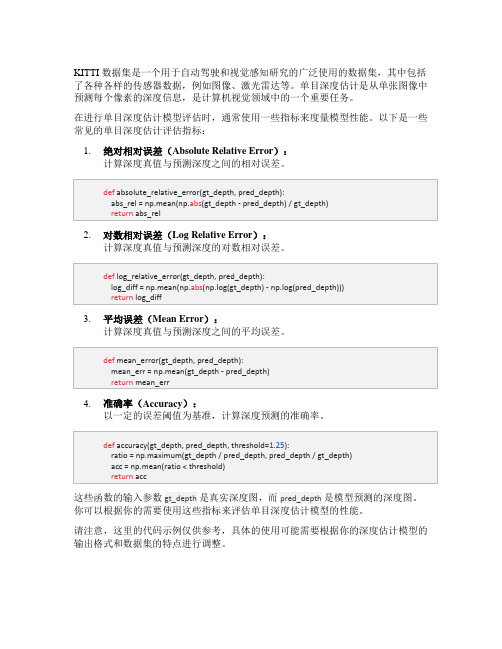
KITTI 数据集是一个用于自动驾驶和视觉感知研究的广泛使用的数据集,其中包括了各种各样的传感器数据,例如图像、激光雷达等。
单目深度估计是从单张图像中预测每个像素的深度信息,是计算机视觉领域中的一个重要任务。
在进行单目深度估计模型评估时,通常使用一些指标来度量模型性能。
以下是一些常见的单目深度估计评估指标:
1.绝对相对误差(Absolute Relative Error):
计算深度真值与预测深度之间的相对误差。
2.对数相对误差(Log Relative Error):
计算深度真值与预测深度的对数相对误差。
3.平均误差(Mean Error):
计算深度真值与预测深度之间的平均误差。
4.准确率(Accuracy):
以一定的误差阈值为基准,计算深度预测的准确率。
这些函数的输入参数gt_depth是真实深度图,而pred_depth是模型预测的深度图。
你可以根据你的需要使用这些指标来评估单目深度估计模型的性能。
请注意,这里的代码示例仅供参考,具体的使用可能需要根据你的深度估计模型的输出格式和数据集的特点进行调整。
单目深度估计综述

单目深度估计综述近年来,深度估计技术在计算机视觉研究中得到了广泛的应用。
深度估计技术是一种方法,可以根据图像或视频帧中的像素,估算出目标物体的距离或深度信息。
它可以帮助我们进行物体检测和分类、目标跟踪等计算机视觉应用任务。
目前,单目深度估计作为一种很有前途的技术,已经得到了越来越多人的关注,其优势在于可以节省设备成本和功耗,同时也可以满足可用性和实时要求。
单目深度估计可以遵循以下一般步骤:(1)计算出图像或视频帧中的每个像素的深度,(2)根据特定的算法,使用深度信息进行物体检测、分割和分类。
单目深度估计对于计算光流、光强变换等技术也有重要意义,可以用来现场重建和实时分析深度信息。
随着机器学习、深度学习以及大数据计算技术的发展,在单目深度估计方面也有许多研究进展。
这些技术的核心思想是利用机器学习的模型来学习深度估计方法,从而精确估算出图像中目标物体的深度值。
其中,基于深度学习的方法具有较高的准确度,而且需要较少的数据来训练模型,因此目前深受欢迎。
在单目深度估计方面,深度学习技术通常可以分为基于极线匹配方法、基于光流法和基于深度神经网络三大类。
基于极线匹配方法通常使用传统的机器学习技术,如SIFT(Scale Invariant Feature Transform)或SURF(Speeded-Up Robust Feature),以及图像处理技术,如角点检测,来估计图像中目标物体的深度值。
基于光流法则利用光流来模拟物体的运动,以估计目标物体的深度。
基于深度神经网络的技术则使用深度神经网络来模拟深度估计问题,以实现更准确的深度值估计效果。
然而,单目深度估计仍然是一项具有挑战的技术,存在许多技术问题和挑战,如信息丢失、模型噪声以及系统参数等等。
针对这些问题,可以通过提高训练集的大小、应用正则化技术、改进训练算法以及提高模型复杂度等方法来解决。
最后,单目深度估计仍然是一个正在发展的领域,现有的技术仍然存在许多的问题,但仍然具有很大的潜力。
自监督单目深度估计原理

自监督单目深度估计原理
自监督单目深度估计是指利用单个摄像头拍摄的图像来估计场景的深度信息,而无需使用其他传感器或者深度相机。
这种方法的原理是利用图像中的视觉线索和几何约束来推断场景的深度。
自监督深度估计的原理主要基于以下几个方面:
1. 视差,通过分析图像中不同位置的像素之间的视差,可以推断出物体距离摄像头的远近。
视差越大的像素对应着距离摄像头更近的物体,而视差较小的像素对应着距离更远的物体。
2. 运动信息,利用图像序列中相邻帧之间的物体运动信息,可以推断出物体的深度。
通过分析物体在图像中的位移和变形,可以估计出物体的相对深度关系。
3. 单目几何约束,利用单目相机成像的几何特性,如透视投影和相机运动模型,可以推断出物体的深度信息。
通过分析图像中的线条、纹理和形状等特征,可以推断出物体的相对位置和距离。
4. 深度学习方法,近年来,深度学习技术在自监督深度估计中
得到了广泛应用。
通过使用深度神经网络来学习图像特征和深度信息之间的映射关系,可以实现更精确的深度估计。
综上所述,自监督单目深度估计的原理涉及视差分析、运动信息推断、单目几何约束和深度学习方法等多个方面。
通过综合利用这些信息,可以实现从单个图像中推断出场景的深度信息。
这种方法在无需使用额外传感器的情况下,能够实现对场景深度的有效估计,具有广泛的应用前景,如自动驾驶、增强现实等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Li Yunlong , Ling Bin, Xu Jiaxing, Du Yongqin, Chen Zhanghuan (Northeast Forestry University,Harbin Heilongjiang,150040)
近年来,Eigen D[4] 等人提出一种由两个部分组成的多 尺度卷积神经网络,第一部分先从图像全局出发得到一个粗 糙的全局结构,再由第二部分通过局部特征对之前的结果进
行细部优化。但是卷积神经网络由于连续的下采样操作如池 化、卷积,导致了图像的细节特征丢失。而 Lin G[5] 等人提出 的 RefineNet 很有效地克服了这个问题,在同为像素级任务 的图像语义分割中取得了很好的效果。Liu F[6] 等人则将问 题表述为条件随机场模型,将像素点之间的关系及 RGB 图像 与深度图之间的关系参数化,通过求解概率图模型来估计人 脸深度。本文采用 RefineNet 结合条件随机场的方法实现由 单目图像到人脸图像的估计。
Abstract: Recently, very deep convolutional neural networks have shown outstanding performance in image processing tasks, such as face recognition and Image feature extraction. However, repeated subsampling operations like pooling or convolution striding in deep CNNs lead to decrease in the image resolution and lost of image details. In this paper, residual connection is used to pass forward the information along the down-sampling process, in order to improves the previous algorithm based on the combination of CNN and CRF. The algorithm formulates the problem as maximization of posteriori probability of conditional random fields, and constructs the loss layer based on it. In this way, the entire network can be trained end-to-end and then the MAP is obtained as the optimal inference of the depth image. Through experiments, the algorithm is tested on the NYU Depth V2 dataset, and its accuracy is obviously improved compared with the original algorithm, which shows its effectiveness. Keywords: depth estimation; single image; face recognition; CRF;可分为两部分。一部分由 RefineNet 构成,用于表述原始图像与深度图像相应像素点之间的关 系。另一部分由卷积网络构成,用于表述图像相邻像素点之 间的关系。损失层的构建基于条件随机场,通过反向传播确 定网络参数后,再对条件随机场进行推断求得算法的最优解 作为最终预测结果。
理论算法
2019.10
基于单目图像的人脸深度估计
李云龙,凌滨,徐家兴,杜永勤,陈章桓 (东北林业大学,黑龙江哈尔滨,150040)
摘要 :近年来,深度卷积神经网络在人脸识别、特征提取等图像处理任务上都展现出了极为优越的性能,基于深度网络 与条件随机场的算法也在人脸深度识别的任务中取得了很好的效果。但是,随着卷积网络连续不断的下采样操作如卷积 和池化,图像的分辨率也随之降低,图像细节随之丢失,十分不利于像素级的图像处理任务。因此,本文对于以往基于深 度网络与条件随机场结合的算法进行了改进,利用残差连接将下采样过程中各层信息向前传递。算法将问题表述为求解 条件随机场的最大化后验概率问题,并以此构建损失层,可实现整个网络端到端的训练,之后通过求解条件随机场的最 大化后验概率,求得深度图像的最优解。通过实验,算法在 NYU Depth V2 数据集上得到验证,准确度较改进前算法具有 明显提高,表明了算法的有效性。 关键词 :深度估计 ;单目图像 ;人脸识别 ;条件随机场 ;卷积神经网络
0 引言
基于单目图像的人脸深度估计是计算机视觉中很基础 的任务,对于三维人脸重建、人脸识别等方面都有着广泛的 应用前景。尽管人类可以依靠多年的经验很轻易地完成这项 任务,但是对于机器来说这个目标依旧很难实现。
研究人员对于这个问题进行过很多尝试。Saxena[1] 等 人于 2005 年首次提出监督型学习方法,将图像划分为很多极 小的区域(超像素块)并利用马尔可夫随机场(MRF)来推断区 域的位置和方向。该方法改进后被扩展成为了视觉效果更好 的 3D 重建方法 Make3D[2]。之后 Liu B[3] 等人通过加入对语义 信息的考量,在深度估计上取得了更好的效果。上述方法大 多需要人工标注特征以及对于人脸几何关系的典型假设,而 深度学习的引入则有效解决了这一问题。
基金项目 :东北林业大学大学生省级创新训练计划项目资助(201910225240)。