航空电动静液作动器技术浅谈
多电飞机电源系统

1. 多电飞机的技术特点多电飞机是航空科技发展的一项全新技术,它改变了传统的飞机设计理念,是飞机技术发展的一次革命。
美国从20世纪80年代中到90年代初开始投入了大量的人力和物力,组织开展多电飞机的研究。
该研究涉及发电、配电、电力管理、电防冰、电刹车、电力作动和发动机等多个领域,从航空电力系统的概念出发,优化整个飞机的设计。
与全电飞机略有不同,多电飞机(More Electric Aircraft,MEA)在用电力系统取代液压和气压系统的过程中,采用电动静液作动器来操纵飞行控制舵面。
电动静液作动器实际上是一种分布式的小型电动和电控液压系统,因而可以说,多电飞机方案是全电飞机方案的初级阶段。
随着波音787飞机和空客380飞机的首飞及投入运营,多电飞机已成为现实。
多电飞机的特征是具有大容量的供电系统,并广泛采用电力作动技术,使飞机重量下降,可靠性提高,维护性好,运营成本降低。
多电飞机的主要优势简述如下。
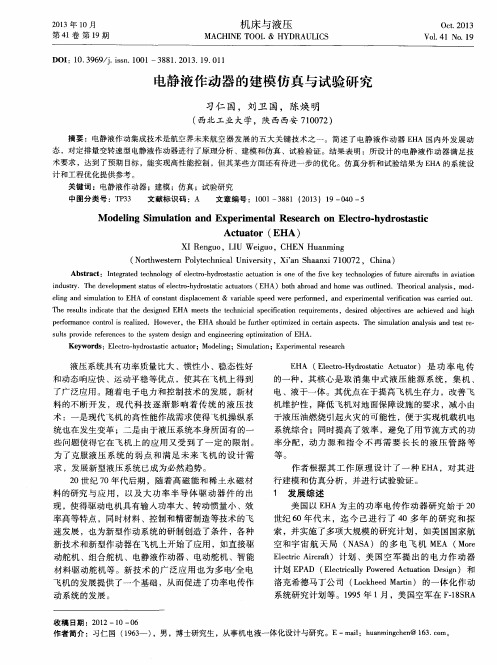
(1)多电飞机使飞机的电气系统体系结构优化影响飞机电气系统体系结构的因素很多,包括飞机的类型(民用或军用运输机、亚声速或超声速飞机、战斗机等)、飞机的体系结构(发动机类型、数量、具体布局)、电气负载总需求及它们之间的互相关联性。
图1.3-1是一种典型的多电民用飞机电气系统体系结构图。
多电飞机技术由于采用电力驱动代替了液压、气压、机械系统和飞机的附件传动机匣,是飞机系统的重大创新,它可以节约飞机的有效空间,优化飞机的空间布局,有利于飞机的总体设计,有效提高了飞机的性能和系统可靠性,使之具有容错和故障后重构的能力。
图1.3-1 多电民用飞机电气系统体系结构图(2)多电飞机简化了飞机的动力系统结构多电飞机中的二次能源只有电能,使整个动力系统设计简化,取消了飞机的附件传动机匣和燃气涡轮起动机,简化了飞机的结构,使飞机结构简单、重量轻、可靠性高、可维修性好、生存能力强、使用维护费用低、地面支援设备少,地面设备和机上接口也得以简化。
航天器超静平台作动器发展及其关键技术综述

第 39 卷第 1 期航 天 器 环 境 工 程Vol. 39, No. 1 2022 年 2 月SPACECRAFT ENVIRONMENT ENGINEERING1 E-mail: ***************Tel: (010)68116407, 68116408, 68116544航天器超静平台作动器发展及其关键技术综述叶田园1,2,庞贺伟3,周元子4*,宗 红4,刘守文1,2(1. 北京卫星环境工程研究所; 2. 航天机电产品环境可靠性试验技术北京市重点实验室;3. 中国空间技术研究院;4. 北京控制工程研究所:北京 100094)摘要:星载有效载荷的灵敏度和有关性能指标的提高对航天器控制系统的精度和稳定度提出越来越高的要求。
具有隔振、抑振及精确指向功能的航天器超静平台得到广泛关注。
超静平台作动器作为实现平台功能的核心执行部件,其质量优劣决定了平台的性能、可靠性和使用寿命。
文章综述国内外不同种类超静平台作动器的性能特点、应用背景及技术发展概况,归纳总结高效率音圈电机技术、长寿命挠性元件技术、地面试验验证技术等关键技术;最后针对未来高精度星载光学载荷的应用需求,探讨了我国在超静平台作动器方面可进一步开展的研究内容。
关键词:超静平台;作动器;挠性元件;隔振;综述中图分类号:V414.5; V416.6文献标志码:A文章编号:1673-1379(2022)01-0001-10 DOI: 10.12126/see.2022.01.001Overview of the development and key technologies of actuator forspacecraft ultra-quiet platformYE Tianyuan1,2, PANG Hewei3, ZHOU Yuanzi4*, ZONG Hong4, LIU Shouwen1,2(1. Beijing Institute of Spacecraft Environment Engineering; 2. Beijing Key Laboratory of Environmental & Reliability TestTechnology for Aerospace Mechanical & Electrical Products; 3. China Academy of Space Technology;4. Beijing Institute of Control Engineering: Beijing 100094, China)Abstract: The improvement of the sensibility and other related performance indicators of satellite-borne payloads calls for higher precision and stability of the spacecraft control system, and the spacecraft ultra-quiet platform with vibration isolation/depression and precise pointing functions has widespread attention. As the key executive component to realize the functions of the ultra-quiet platform, the actuator plays a decisive role for the task reliability and the lifetime of the platform. In this paper, the actuators of ultra-quiet platform are classified, and discussed according to their performance characteristics, the task background, and the technical development. In addition, the key technologies with respect to the high-efficiency voice coil motor, the long-life flexible element, and the ground test verification are reviewed. Finally, in view of the application requirements of high-precision spaceborne optical payloads in the future, some suggestions are made on the research projects worth to be further carried out in the field of the ultra-quiet platform actuator.Keywords: ultra-quiet platform; actuator; flexible element; vibration isolation; review收稿日期:2021-07-29;修回日期:2022-02-25引用格式:叶田园, 庞贺伟, 周元子, 等. 航天器超静平台作动器发展及其关键技术综述[J]. 航天器环境工程, 2022, 39(1): 1-10YE T Y, PANG H W, ZHOU Y Z, et al. Overview of the development and key technologies of actuator for spacecraft ultra-quiet platform[J]. Spacecraft Environment Engineering, 2022, 39(1): 1-100 引言当前天基天文观测、高分辨率对地观测等航天任务对航天器的控制精度提出了极高的要求。
电静液作动器的建模仿真与试验研究
Mo de l i ng S i mu l a t i o n a nd Ex pe r i me n t a l Re s e a r c h o n El e c t r o , hy d r o s t a s t i c
Ac t u a t o r( EH A )
液压 系统具有功率质量 比大 、惯性小 、稳态性好
术要求 ,达到 了预期 目标 ,能实现高性能控制 ,但其某些方 面还有 待进 一步的优化 。仿真分析和试验结果 为 E H A的系统设
计和工程优化提供参考 。
关键词 :电静液作动器 ;建模 ;仿真 ;试验研究
中 图分 类 号 :T P 3 3 文 献标 识 码 :A 文 章 编 号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )1 9— 0 4 0—5
2 0 1 3年 1 O月 第4 1 卷 第 l 9期
机床与液压
MACHI NE T 00L & HYDRAULI CS
Oc t . 2 01 3 Vo 1 . 41 No .1 9
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 1 9 . 0 1 1
Abs t r ac t: I n t e g r a t e d t e c h no l o g y o f e l e c t r o — h y d r o s t a s t i c a c t ua t i o n i s o n e o f t h e iv f e k e y t e c hn o l o g i e s o f f u t u r e a i r c r a f t s i n a v i a t i on
一种新型电静液作动飞机刹车系统
收稿日期:2011-06-08基金项目:博士学科点专项科研基金资助项目(20106102110032)作者简介:张谦(1968—),男,陕西韩城人,博士研究生,主要研究方向为飞机刹车技术、液压伺服技术等;李兵强(1982—),男,河北石家庄人,博士后,主要研究方向为智能自动化装置、交流电机调速等。
一种新型电静液作动飞机刹车系统张谦,李兵强(西北工业大学自动化学院,陕西西安710129)摘要:多电飞机已成为现代飞机的发展趋势,其刹车系统不再采用传统的液压刹车。
提出一种用于多电飞机刹车系统的泵控和阀控相结合的电静液刹车系统。
首先分析了电静液作动器的工作原理和数学模型,对电静液机构进行了单独的控制仿真;接着对飞机刹车系统进行数学建模,并将这种电静液作动飞机刹车系统进行控制仿真。
仿真结果表明,基于电静液作动器的刹车系统具有良好的刹车性能,适用于多电飞机刹车系统。
关键词:电静液作动器;飞机刹车系统;多电飞机中图分类号:TH137文献标识码:A 文章编号:1000-8829(2011)07-0079-04A Novel Electro-Hydrostatic Actuator for Aircraft Braking SystemZHANG Qian,LI Bing-qiang(School of Automation,Northwestern Polytechnical University,Xi an 710129,China)Abstract:More-electric aircraft is a new technical trend for modern aircraft,which does not need hydraulic braking system as traditional.A novel electro-hydrostatic actuator(EHA)based on pump and valve cooperatingcontrolled for aircraft braking system is proposed.The principles and mathematic model are described.The sim-ulation results for EHA and aircraft braking system show that the EHA and braking system have higher dynam-ic performance and it can meet the requirements of the more-electric aircraft braking system.Key words:electro-hydrostatic actuator;aircraft braking system;more-electric aircraft 多电飞机技术已成为现代飞机的一个新兴发展方向。
电动静液作动器框图建模与控制
2009年3月第35卷第3期北京航空航天大学学报J o u r n a l o fB e i j i n g U n i v e r s i t y ofA e r o n a u t i c s a n dA s t r o n a u t i c s M a r c h 2009V o l .35 N o .3收稿日期:2008-05-14作者简介:康荣杰(1981-),男,福建龙岩人,博士生,k a n g r o n g j i e @v i p.163.c o m.电动静液作动器框图建模与控制康荣杰 焦宗夏 王少萍(北京航空航天大学自动化科学与电气工程学院,北京100191) 摘 要:功率电传作动系统是未来飞行控制的发展方向,它取消了传统的中央液压油源.电动静液作动器是功率电传系统的执行机构,在作动器端把电能转化为局部液压能,兼具传统液压系统和直接电力驱动作动器的优点.根据其元部件数学方程,建立非线性框图子模型,构造了一种定排量变转速电动静液作动器,完善了补油回路和摩擦特性的描述.通过考察作动器稳定性㊁静态刚度和动态性能指标,对单环比例㊁积分㊁微分(P I D ,P r o p o r t i o nI n t e g r a -t i o nD i f f e r e n t i a t i o n )㊁多环P I D ㊁全状态反馈控制等方法进行了设计及比较分析.仿真结果表明,结合动态压力反馈策略的全状态反馈控制器能有效改善系统的动㊁静态性能.关 键 词:电动静液作动器;框图模型;仿真;控制中图分类号:V245;T H137文献标识码:A 文章编号:1001-5965(2009)03-0338-04B l o c kd i a g r a m m o d e l i n g a n dc o n t r o l o f e l e c t r o -h yd r o s t a t i ca c t u a t o r K a n g R o n g j ie J i a oZ o n g x i a W a n g S h a o p i n g(S c h o o l o fA u t o m a t i o nS c i e n c e a n dE l e c t r i c a l E n g i n e e r i n g ,B e i j i n g U n i v e r s i t y o fA e r o n a u t i c s a n dA s t r o n a u t i c s ,B e i j i n g 100191,C h i n a )A b s t r a c t :P o w e r -b y -w i r e (P B W )a c t u a t i o n i s t h e f u t u r e d i r e c t i o n o f f l i g h t c o n t r o l s y s t e mi nw h i c h t h en e e df o rac e n t r a lh y d r a u l i cs y s t e mi se l i m i n a t e d .T h ee l e c t r o -h y d r o s t a t i ca c t u a t o r (E H A )i sa k i n do f P B Wa c t u a t o r t h a t c o n v e r t s t h e e l e c t r i c a l p o w e r i n t o l o c a l h y d r a u l i c p o w e r a n dc o m b i n e s t h e b e n e f i t s o f t h ec o n v e n t i o n a lh y d r a u l i cs ys t e m a n dt h ed i r e c td r i v ee l e c t r i c a l a c t u a t o r s .B a s e do nt h e m a t h e m a t i c e q u a t i o n s ,a l l t h eE H Ac o m p o n e n t sw e r em o d e l e db y t h eb l o c kd i a gr a m s a n da s s e m b l e d t o a f i x e d -d i s p l a c e m e n t v a r i a b l e -s p e e d a r c h i t e c t u r e ,w h i c h c o n t a i n e d t h e r e f e e d i n g c i r c u i t a n d t h e f r i c -t i o n .F u r t h e r m o r e ,t h es i n g l e p r o p o r t i o ni n t e g r a t i o nd i f f e r e n t i a t i o n (P I D )c o n t r o l l e r ,c a s c a d eP I D c o n t r o l l e r a n d s t a t e f e e d b a c kc o n t r o l l e r a r ed e s i g n e d f o r c o m p a r i s o na n a l y s i s t h a t f o c u s e do n t h e s y s -t e ms t a b i l i t y ,s t i f f n e s s a n dd y n a m i c c h a r a c t e r i s t i c s .T h e s i m u l a t i o n r e s u l t s p r o v e t h a t t h e s t a t e f e e d -b a c kc o n t r o l l e r a l o n g w i t hd y n a m i c p r e s s u r e f e e d b a c ks t r a t e g y e f f i c i e n t l y i m p r o v e s t h e s t a t i c a n dd y -n a m i c p e r f o r m a n c e o fE H A.K e y w o r d s :e l e c t r o -h y d r o s t a t i c a c t u a t o r ;b l o c kd i a g r a m m o d e l ;s i m u l a t i o n ;c o n t r o l 传统液压系统由于泄漏㊁噪声㊁管路复杂等原因,将逐步退出机载伺服作动领域,取而代之的是采用功率电传技术(P B W ,P o w e r -B y -W i r e )的飞行控制系统.功率电传使飞机次级能源系统至各作动执行机构之间的功率传输可以通过电缆以电能量方式完成.P B W 作动系统也不再需要中央液压系统和遍布机身的液压管路,从而大幅提高了飞行器的可靠性㊁可维护性㊁效率和生存能力,有助于实现多电/全电飞机.电动静液作动器(E H A ,E l e c t r o -H y d r o s t a t i c A c t u a t o r )是国内外获得率先发展的功率电传作动器.20世纪90年代末,E H A 开始在F -18S R A ㊁F -16等飞机上进行试验,并获得成功,目前,已经在美国F -35联合攻击机和空中客车A -380上少量装备.国内对这方面的研究刚刚起步,主要工作集中在方案设计㊁建模仿真及相关控制理论,采用的数学方法通常是基于微分方程的拉普拉斯变换,求解系统传递函数进行分析设计[1-3].考虑到传递函数本质上是一种针对线性定常系统的数学模型,与实际的E H A 系统不尽相符.此外,由于传递函数的局限性,目前已有的E H A 模型,大都忽略了补油环节,并且简化了摩擦.针对这些不足,可以采用基于数学方程的框图建模方法构建E H A 系统模型,更有利于描述非线性特征,提高了模型的精确性.1 电动静液作动器结构分析E H A 是一种基于闭式回路的电液伺服系统,根据驱动电机和液压泵的不同工作模式,目前主要有:定排量变转速㊁变排量定转速和变排量变转速3种形式.其中,定排量变转速E H A 通过控制电机的转向和转速来控制作动器作动的方向及速率,相比其它2种方案,在效率和结构简化上更具优势.图1描述了一种典型定排量变转速E H A的结构原理.图1 定排量变转速E HA 结构原理图2 E H A 系统建模定排量变转速E H A 可分解为驱动电机㊁液压泵㊁补油回路㊁作动筒等子模块,同时考虑摩擦环节,分别构建子模型,最后组装成为完整系统.2.1 补油环节建模闭式回路是E H A 区别于传统液压系统的一个重要特点,因此需要通过蓄能器和单向阀构建补油环节.其主要作用是:维持系统最低压力;防止气穴;对液压油外泄漏进行补充[4].E H A 补油环节的流量㊁压力关系见图2.其流量方程为Q a =Q e -Q c 1-Q c 2Q 1f =Q 1+Q c 1Q 2f =Q 2-Q üþýïïïïc 2(1)其中,Q a 蓄能器输入流量;Q e 为泵的外泄漏;Q 1和Q 2分别为液压泵的出口和进口流量;Q c 1和Q c 2为流经的单向阀流量,取决于P a -P 1和P a -P 2,可以用查找表或函数拟合来描述,P 1和P 2分别为液压泵的出口和进口压力,P a 为蓄能器的压力:P a =G c /V g(2)式中G c =P a i V kg iV g =V g i -ʏQ ad ()t k其中,P a i 为蓄能器初始压力;V g i 为蓄能器内气体的初始体积;k 为气体的多变指数,取值范围在1.0~1.4之间.根据上述分析,可得到补油环节的框图模型见图3,图4是蓄能器(式(2))的框图模型.可见,框图模型便于处理非线性数学函数,适合多层次复杂模型的构建.图2 补油环节的流量与压力图3 补油环节框图模型图4 蓄能器框图模型2.2 摩擦建模过去的E H A 模型通常把摩擦简化为一个粘滞阻力,大小与速率成正比.事实上,摩擦是一种非常复杂的非线性现象,它不仅与速度有关,还与位置㊁温度㊁润滑等有关[5-6].典型的摩擦通常表现为粘性摩擦㊁库仑摩擦和静摩擦(对于摩擦力矩同样适用):F f (x ㊃p )=[F c +(F s -F c )㊃e -|x ㊃p |/α+K v |x ㊃p |]㊃s i g n (x ㊃p )(3)其中,F s 为最大静摩擦力(矩);F c 为库仑摩擦力(矩);K v 为粘性阻尼系数;x ㊃p 为运动速度;α为速度参考量;s i gn (㊃)为符号函数,为使模型连续,可对其做一个改进,用双曲正切函数t a n h (㊃)来933 第3期 康荣杰等:电动静液作动器框图建模与控制实现:F f(x㊃p)=[F c+(F s-F c)㊃e-|x㊃p|/α+K v|x㊃p|]㊃t a n h(x㊃p/β)(4)其中,β为速度参考量.式(4)所描述的摩擦如图5所示,其框图模型如图6所示.图5摩擦模型图6摩擦力框图模型2.3E H A开环模型通过以上方法,可以得到E H A其它所有元部件的框图模型,在S i m u l i n k中将它们封装后,依照输入输出关系联接,构成图7所示的完整开环系统.框图建模的优点在于:模块化的子模型;可根据需要添加或删除元部件;便于观察系统所有的状态变量.u 电机输入电压;ω 电机转速;T l 电机负载转矩;x p 活塞位移;F e x 外力.图7 E HA开环系统3E H A控制方法研究E H A包含有电气元件和液压元件,特性相比传统液压系统更为复杂.本节通过考察系统稳定性㊁静态刚度和动态性能等指标,对单环比例㊁积分㊁微分(P I D,P r o p o r t i o n I n t e g r a t i o nD i f f e r e n-t i a t i o n)㊁多环P I D㊁全状态反馈等控制方法进行了比较分析.3.1单环P I D控制单环P I D控制由于其结构简单,在工程领域得到大量应用.在S i m u l i n k中进行仿真,输入20mm位置阶跃,并在2.5s时加入30k N负载.图8为位置响应曲线,图中,系统上升时间大约为0.4s,通过提高控制器增益,可以进一步提高响应速度,但是会造成超调.2.5s后,由于带载造成了很大的稳态误差,可见系统刚度较低.图9的压力曲线中存在振荡,其频率接近系统液压固有频率,说明该系统的液压阻尼偏低.图8位置响应曲线(单环P I D控制)图9压力响应曲线(单环P I D控制)综合上述分析,很难通过P I D3个参数的调节,使单环P I D控制的E H A系统获得理想性能.作为改进,引入了多环P I D控制.3.2多环P I D控制多环P I D控制将外环的输出作为内环的输入,具有抗干扰性强㊁刚度好㊁速度快等优点.对于E HA而言,由内至外依次是电机电流环㊁电机速度环和作动筒位置环.图10给出了多环控制下的位置响应曲线(输入条件不变).图10位置响应曲线(多环P I D控制)仿真结果表明,系统的快速性较单环控制有所提高,静态刚度和带载能力也有了明显增强,但是,压力振荡较单环控制更加剧烈.因此,进一步引入了全状态反馈控制方法.043北京航空航天大学学报2009年3.3全状态反馈控制全状态反馈控制充分利用了系统的全部状态信息,考虑E HA为一个5阶系统,具有如下状态变量:电机电流I,ω,ΔP=P1-P2,x p,x㊃p.将系统在零点附近做线性化处理后,得到E H A系统的状态方程,根据指定的闭环极点,通过M a t l a b软件可以计算出状态反馈矩阵:K=[K1K2K3K4K5]为了消除压力负反馈造成的稳态误差,可以进一步引入动态压力反馈措施:在压力反馈回路上串入一个高通滤波器,既保留了压力反馈对动态性能的改善,又消除了它对静态性能的影响.高通滤波器截止频率可选为系统液压固有频率的15%左右.改进后的控制结构如图11所示.图11结合动态压力反馈策略的全状态反馈控制图12为系统压力响应曲线,图13为系统在全状态反馈控制下的位置响应曲线.可见,全状态反馈控制的E H A系统响应速度进一步被提高(大约为0.2s),压力振荡也得到了很好的抑制.系统具有良好的动静态性能,完全能够满足机载作动的控制性能要求.图12压力响应曲线(全状态反馈控制)图13位置响应曲线(全状态反馈控制)4结论通过一种不依赖于传递函数的框图建模方法,完成了E HA子系统建模与系统综合.在此基础上,对E H A性能进行优化设计,分析对比了包括单环P I D㊁多环P I D㊁全状态反馈㊁动态压力反馈在内的多种控制方法,得到如下结论:1)框图模型本质上是一种非线性模型,相比传统的传递函数模型包含有更多的信息,更精确地反映了系统本质;2)单环P I D不能满足E H A控制要求,存在响应慢㊁刚度低㊁振荡明显的缺点;3)多环P I D能大大改善系统性能,提高了响应速度和静态刚度,但是依然存在压力振荡明显的缺点;4)结合动态压力反馈策略的全状态反馈控制能有效改善系统动㊁静态特性,可以满足机载伺服作动的性能要求.参考文献(R e f e r e n c e s)[1]G a oB o,F uY o n g l i n g,P e i Z h o n g c a i,e t a l.R e s e a r c ho nd u-a l-v a r i ab l e i n t e g r a t e de l ec t r o-h yd r o s t a t i ca c t u a t o r[J].C h i-n e s e J o u r n a l o fA e r o n a u t i c s,2006,19(1):77-82 [2]马纪明,付永领,李军,等.一体化电动静液作动器(E HA)的设计与仿真分析[J].航空学报,2005,26(1):79-83M a J i m i n g,F uY o n g l i n g,L i J u n,e t a l.D e s i g n,s i m u l a t i o na n d a n a l y s i s o f i n t e g r a t e d e l e c t r i c a l h y d r o s t a t i c a c t u a t o r[J].A c t aA e r o n a u t i c ae tA s t r o n a u t i c aS i n i c a,2005,26(1):79-83(i nC h i n e s e)[3]H a b i b i S,G o l d e n b e r g A.D e s i g no f an e wh i g h p e r f o r m a n c ee l e c t r o-h y d r a u l i ca c t u a t o r[C]//P r o c e e d i n g so ft h eI E E E/A S M E I n t e r n a t i o n a l C o n f e r e n c e o n A d v a n c e d I n t e l l i g e n tM e c h a t r o n i c s.A t l a n t a:P e r g a m o n,1999:227-232 [4]王占林.近代液压伺服控制[M].北京:北京航空航天大学出版社,2005:16-20W a n g Z h a n l i n.M o d e r n e l e c t r i c a l a n dh y d r a u l i c s e r v o c o n t r o l [M].B e i j i n g:B e i j i n g U n i v e r s i t y o fA e r o n a u t i c s a n dA s t r o-n a u t i c sP r e s s,2005:16-20(i nC h i n e s e)[5]王晓东,华清,焦宗夏,等.负载模拟器中的摩擦力及其补偿控制[J].中国机械工程,2003,14(6):67-70W a n g X i a o d o n g,H u a Q i n g,J i a oZ o n g x i a,e ta l.F r i c t i o na n d i t sc o m p e n s a t i o n m e t h o di nl o a ds i m u l a t o r[J].C h i n aM e c h a n i c a l E n g i n e e r i n g,2003,14(6):67-70(i nC h i n e s e)[6]P a p a d o p o u l o sEG,C h a s p a r i sGC.A n a l y s i s a n dm o d e l-b a s e dc o n t r o l o f s e r v o m e c h a n i s m sw i t hf r i c t i o n[C]//P r o c e ed i n g s o f t he I E E E/R S J I n t e r n a t i o n a l C o nf e r e n c e o n I n t e l l ig e n tR o-b o t s a n dS y s t e m s.L a u s a n n e,S w i t z e r l a n d:S p r i n g e r-V e r l a g, 2002:2109-2114(责任编辑:赵海容)143第3期康荣杰等:电动静液作动器框图建模与控制。
飞机电液伺服作动系统建模及分析探究

摘要:随着科学技术的不断发展,自动化技术在工业生产的各个领域逐渐被广泛应用,对整个行业整体的发展都起 到了极大的促进作用。但对于集中供热系统来说,自动控制技术的应用仍然处于起步阶段,自动化水平的提升非常有限。 因此,必须对自动控制技术在集中供热系统中的规模化应用进行深入研究,这样才能促进自动控制技术在集中供热系统 中的发展。本文就自动控制技术在集中供热节能方面的应用进行了分析研究。
(1)系统输入指令误差。位移传感器反馈电压与输入 电压进行比较,成为输入指令误差。其中 为作动系统输入 电压, 为线位移传感器反馈电压,e 为作动系统伺服放大 电压。
其中 为作动筒活塞面积, 为作动杆与作动筒位移差 值, 为作动器总泄露系数, 为总压缩容积, 为有效 容积弹性模量。
(5)位移传感器反馈方程。位移传感器用来测量作动 筒和作动杆相对位移,并将差值以电压信号形式进行反馈。 其中 为位移传感器反馈系数。
伺服作动系统典型构成如图 1 所示,主要包含控制器和 作动器两部分。其中伺服阀作为电液转换装置,是作动器的 核心机构。其原理在于接收电流指令,使挡板偏转,节流面 积差使液压放大器桥路不平衡,在阀芯上产生驱动力。阀芯 运动时,阀口开启,产生输出流量正比于阀芯位移,而反馈 弹簧产生反馈力抵制输入力,当反馈力等于输入力,阀芯运 动停止。
关键词:自动控制技术;集中供热;节能;应用分析 中图分类号:TU995 文献标识码:A 文章编号:1671-0711(2019)07(上)-0224-03
浅谈航空领域中电液伺服系统应用
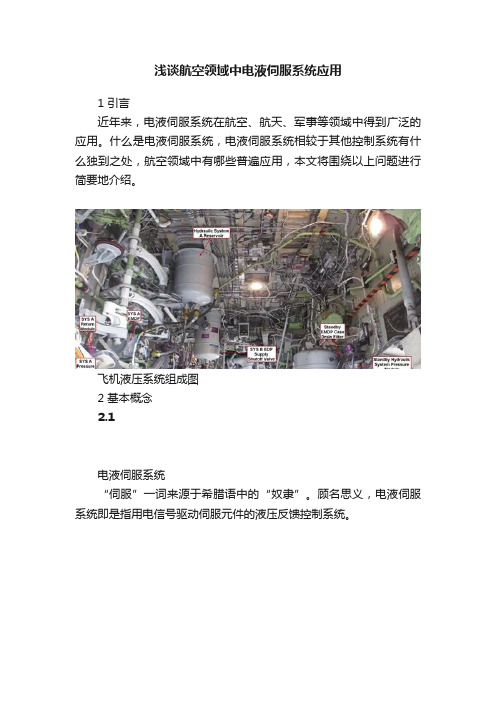
浅谈航空领域中电液伺服系统应用1 引言近年来,电液伺服系统在航空、航天、军事等领域中得到广泛的应用。
什么是电液伺服系统,电液伺服系统相较于其他控制系统有什么独到之处,航空领域中有哪些普遍应用,本文将围绕以上问题进行简要地介绍。
飞机液压系统组成图2 基本概念2.1电液伺服系统“伺服”一词来源于希腊语中的“奴隶”。
顾名思义,电液伺服系统即是指用电信号驱动伺服元件的液压反馈控制系统。
电液伺服系统仿真模型在电液伺服反馈控制系统中,执行装置的实际输出量作用于控制对象,反馈元件监测控制对象状态信息产生电反馈信号,借助比较元件将反馈信号与规划指令进行比较,得到误差信号,经过相应的算法控制器处理后,通过放大元件生成控制指令传递给控制装置,引导执行装置下一步的动作。
电液伺服系统信号传递图2.2伺服元件电液伺服系统中的伺服元件包括伺服阀与伺服泵。
传统液压系统中的换向阀只能用于流向的改变,而不能改变流量与压力的大小,无法满足现代工业控制的需求。
为了满足人们对于“伺服”的需要,能够对压力、流量按比例地进行控制的比例阀,精度进一步提高的伺服阀以及介于两者间的比例伺服阀便应运而生。
而比例阀通常用于开环控制系统中,故狭义来讲不算做伺服元件。
伺服泵则是指通过伺服电机来控制的液压泵,可以精确控制输出功率,根据工况要求供给合适流量的液压油,具有节约能源、降低油温、减少噪声等优点。
3 系统特性传统液压伺服系统作为早期机载作动系统,采用液压信号作为控制信号传递的媒介,尽管有着输出功率大、可无级调速的优点,但其信号传递速度慢、延迟较高,不利于进行复杂综合运算,控制效果不理想,且能量损失较大,机身散热性差。
针对上述问题,电液伺服系统采用电信号取代液压信号,在保留液压系统优点的同时也有着自己的独到之处:(1)控制装置与执行装置频率响应快。
电液伺服系统中采用电液伺服阀作为控制装置,其固有频率通常在100Hz以上,能够实现高速启动、制动与换向。
飞机电静液作动器滑模-PID控制器设计

飞机电静液作动器滑模-PID控制器设计洪辉;高斌;李晶【摘要】在多电飞机应用环境中,由于电静液作动器(Electro-Hydrostatic Actuator,以下简称EHA)系统本身的强非线性与承载交变动载荷的不确定性,简单PID控制无法达到理想控制效果.提出了滑模-PID复合控制,电机电流环和转速环构成控制系统内环,以PI控制器实现电机调速;作动筒位置环为外环,以滑模控制提升系统的快速性和鲁棒性.建立了EHA数学模型,并设计了滑模控制器结构.仿真结果表明,滑模-PID复合控制方法能有效地消除超调和减小跟随误差,实现对EHA位置的精确控制.【期刊名称】《民用飞机设计与研究》【年(卷),期】2018(000)004【总页数】5页(P42-46)【关键词】电静液作动器;多电飞机;滑模控制;PID控制【作者】洪辉;高斌;李晶【作者单位】同济大学,上海201800;上海飞机设计研究院,上海201210;同济大学,上海201800【正文语种】中文【中图分类】TH1370 引言电静液作动器(Electro-Hydrostatic Actuator,以下简称EHA)是一种功率电传作动器,其优势在于能源系统和液压用户被集成在一起,减少了管道,提高了能量效率和飞机的生存能力[1-2]。
目前,EHA已开始应用于A380飞控系统。
随着多电飞机的发展,EHA将在机载系统中发挥更重要的作用[3]。
EHA主要有三种形式:变速电机驱动定量泵(Variable Motor Fixed Pump,以下简称VMFP);恒速电机驱动变量泵(Fixed Motor Variable Pump);变速电机驱动变量泵(Variable Motor Variable Pump)[4]。
其中,VMFP-EHA由于其结构简单和高效率而得到较多应用。
飞机EHA系统具有复杂的非线性,且在飞控系统中直接承受不确定性的交变载荷[5-6]。
因此,采用简单的PID控制无法达到理想的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
航空电动静液作动器技术浅谈
随着航空工业的发展和飞机性能的不断提高,航空电动静液作动器技术在航空领域的
应用也越来越广泛。
航空电动静液作动器是一种集成了电动机和液压执行机构的一种新型
航空动力执行装置,具有结构简单、可靠性高、响应速度快等特点,被广泛应用于飞行控制、起落架驱动、发动机控制等领域。
本文将从航空电动静液作动器的基本原理、工作特
点以及在航空领域的应用等方面进行简要介绍。
一、航空电动静液作动器的基本原理
航空电动静液作动器是一种新型的电液一体化执行装置,其基本原理是通过电动机驱
动液压泵,将液压油送入作动器内部的压力腔,从而改变压力腔内的液压压力,实现作动
器的伸缩运动。
在航空电动静液作动器中,电动机和液压泵是整体结合在一起的,通过电
动机驱动液压泵工作,从而实现液压系统的工作。
其工作原理类似于传统的液压作动器,
但是由于引入了电动机,使得其在性能和应用上有了很大的提升。
1.结构简单:航空电动静液作动器采用电液一体化设计,整体结构紧凑,占用空间小,重量轻,便于安装和维护。
2. 可靠性高:航空电动静液作动器采用了先进的电子控制技术和智能化设计,具有
自动故障诊断和保护功能,能够有效提高系统的可靠性和安全性。
3. 响应速度快:航空电动静液作动器采用电动机驱动,具有响应速度快的特点,能
够实现快速精确的动作控制,满足飞行器对于动力执行装置的高要求。
1.飞行控制系统:航空电动静液作动器被广泛应用于飞行控制系统中,用于实现飞机
的副翼、升降舵、方向舵等飞行控制面的运动控制,具有结构简单、可靠性高、响应速度
快等优点。
2. 起落架系统:航空电动静液作动器也被应用于飞机的起落架系统中,用于实现起
落架的伸缩运动控制,能够实现快速准确的起落架操纵,提高了飞机在地面和空中的安全
性和可靠性。
3. 发动机控制系统:航空电动静液作动器还被应用于飞机的发动机控制系统中,用
于实现发动机的节流阀、涡轮增压器、燃油喷射等部件的动作控制,能够实现对发动机性
能的精准控制,提高了飞机的性能和经济性。