一、传感器标定实验报告

传感器性能标定报告
专业:------ 姓名:-------- 学号:---------
一.目的
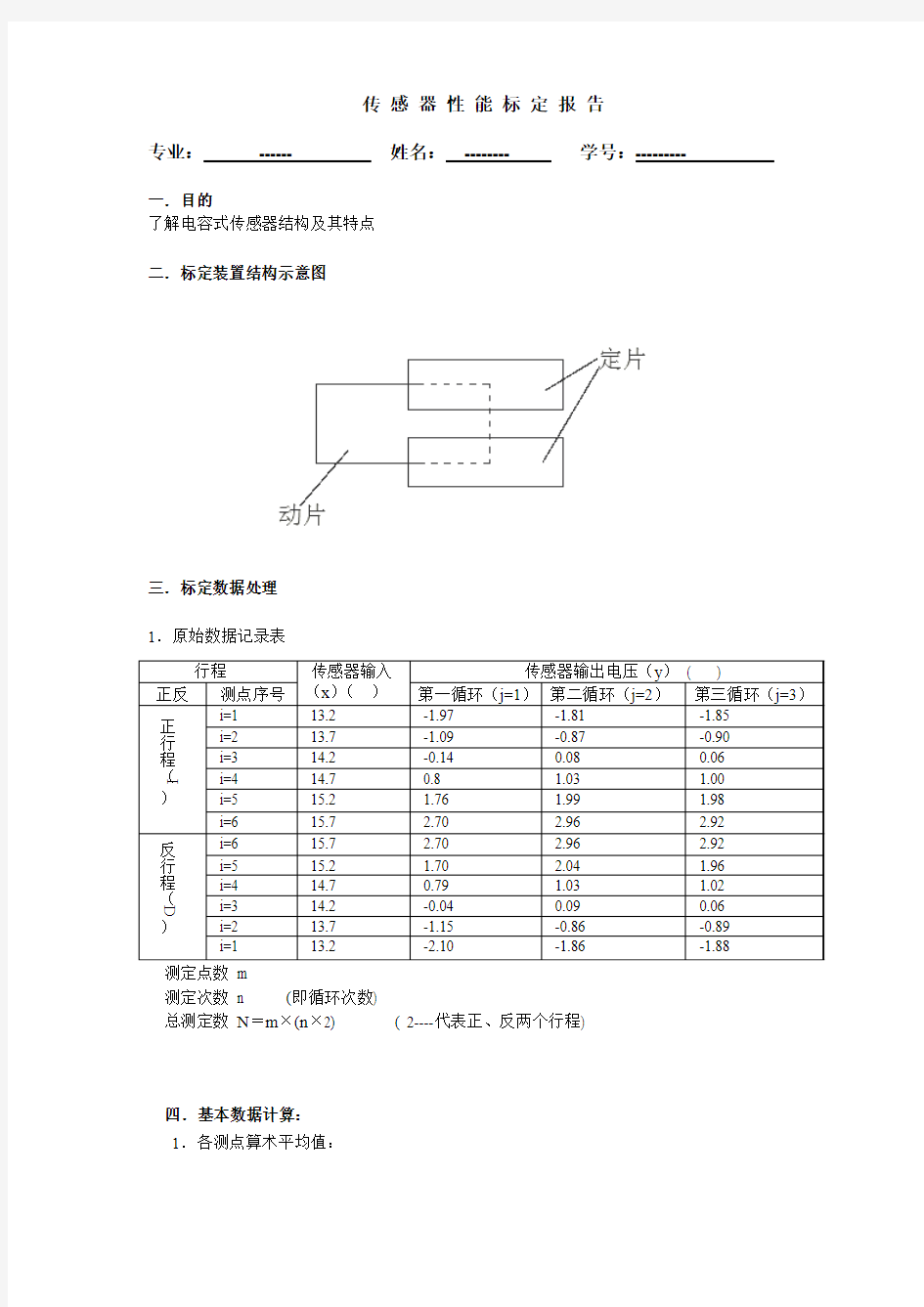
了解电容式传感器结构及其特点
二.标定装置结构示意图
三.标定数据处理
1.原始数据记录表
测定次数n (即循环次数)
总测定数N=m×(n×2) ( 2----代表正、反两个行程)
四.基本数据计算:
1.各测点算术平均值:
正行程(I )平均值
反行程(D )平均值
∑==n
i
j ij
n iD Y Y 1
正反行程平均值 ),(2
1iD iI i += i=1,2,…6;
2.各测点子样方差:2S
正行程: 2
11
12
)(iI n
j i n iI
Y Y S -=
∑=- 反行程:
2
1
112)(iD n
j i
n iD S -=∑=-
方差表:
3.子样标准差
)(1
1
2
221
∑∑==+=
m i m
i iI iD m
S S S (m=6 I =1,2,…..6) 计算可得:
=s 0.1309
4.最佳直线方程
Y=(1.909x-27.099)
五.各项性能指标计算: 1. 灵敏度(K ): =??=x
y
K ( 1.909 )
2. 满量程输出:)(FS Y =FS Y =-K X X )(0max ( 4.772 )
3.独立线性度(
L δ)
: ≈=
?%100*max
)(FS
L Y Y L δ 0.290% 其中:max Y Y L ?=?
4. 重复性(
R δ )
:
(取λ=3,即置信度为99.73%)
==%100**FS
Y S R λδ8.228%
5.迟滞(
H δ):
≈=?%100*max
)(FS
H Y Y H δ 1.467% 其中:iD
iI H Y Y Y ?-=?
6.总精度(δ ):
=+==
+?R L Y S
Y FS
L δδδλ%100**)(max 8.518%
传感器测试实验报告
实验一 直流激励时霍尔传感器位移特性实验 一、 实验目的: 了解霍尔式传感器原理与应用。 二、基本原理: 金属或半导体薄片置于磁场中,当有电流流过时,在垂直于磁场和电流的方向上将产生电动势,这种物理现象称为霍尔效应。具有这种效应的元件成为霍尔元件,根据霍尔效应,霍尔电势U H =K H IB ,当保持霍尔元件的控制电流恒定,而使霍尔元件在一个均匀梯度的磁场中沿水平方向移动,则输出的霍尔电动势为kx U H ,式中k —位移传感器的灵敏度。这样它就可以用来测量位移。霍尔电动势的极性表示了元件的方向。磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线性度就越好。 三、需用器件与单元: 霍尔传感器实验模板、霍尔传感器、±15V 直流电源、测微头、数显单元。 四、实验步骤: 1、将霍尔传感器安装在霍尔传感器实验模块上,将传感器引线插头插入实验模板的插座中,实验板的连接线按图9-1进行。1、3为电源±5V , 2、4为输出。 2、开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1使数显表指示为零。 图9-1 直流激励时霍尔传感器位移实验接线图 3、测微头往轴向方向推进,每转动0.2mm 记下一个读数,直到读数近似不变,将读数填入表9-1。 表9-1 X (mm ) V(mv)
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。 五、实验注意事项: 1、对传感器要轻拿轻放,绝不可掉到地上。 2、不要将霍尔传感器的激励电压错接成±15V,否则将可能烧毁霍尔元件。 六、思考题: 本实验中霍尔元件位移的线性度实际上反映的时什么量的变化? 七、实验报告要求: 1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。 2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进行补偿。
传感器实验报告
传感器实验报告(二) 自动化1204班蔡华轩 U2 吴昊 U5 实验七: 一、实验目的:了解电容式传感器结构及其特点。 二、基本原理:利用平板电容C=εA/d 和其它结构的关系式通过相应的结 构和测量电路可以选择ε、A、d 中三个参数中,保持二个参数不变,而只改变其中一个参数,则可以有测谷物干燥度(ε变)测微小位移(变d)和测量液位(变A)等多种电容传感器。 三、需用器件与单元:电容传感器、电容传感器实验模板、测微头、相敏 检波、滤波模板、数显单元、直流稳压源。 四、实验步骤: 1、按图6-4 安装示意图将电容传感器装于电容传感器实验模板上。 2、将电容传感器连线插入电容传感器实验模板,实验线路见图7-1。图 7-1 电容传感器位移实验接线图 3、将电容传感器实验模板的输出端V01 与数显表单元Vi 相接(插入主控 箱Vi 孔),Rw 调节到中间位置。 4、接入±15V 电源,旋动测微头推进电容传感器动极板位置,每间隔 记下位移X 与输出电压值,填入表7-1。
5、根据表7-1 数据计算电容传感器的系统灵敏度S 和非线性误差δf。 图(7-1) 五、思考题: 试设计利用ε的变化测谷物湿度的传感器原理及结构,并叙述一 下在此设计中应考虑哪些因素 答:原理:通过湿度对介电常数的影响从而影响电容的大小通过电压表现出来,建立起电压变化与湿度的关系从而起到湿度传感器的作用;结构:与电容传感器的结构答大体相同不同之处在于电容面板的面积应适当增大使测量灵敏度更好;设计时应考虑的因素还应包括测量误差,温度对测量的影响等
六:实验数据处理 由excle处理后得图线可知:系统灵敏度S= 非线性误差δf=353=% 实验八直流激励时霍尔式传感器位移特性实验 一、实验目的:了解霍尔式传感器原理与应用。 二、基本原理:霍尔式传感器是一种磁敏传感器,基于霍尔效应原理工作。 它将被测量的磁场变化(或以磁场为媒体)转换成电动势输出。 根据霍尔效应,霍尔电势UH=KHIB,当霍尔元件处在梯度磁场中 运动时,它就可以进行位移测量。图8-1 霍尔效应原理
传感器实验报告1
机 械 工 程 测 试 实 验 报 告 学 院: 机电工程学院 系 专业班级: 机制122 学生姓名: 黄余林 龙杰 李刚 孙龙宇 朱国帅 实验日期: 备,
目录 实验一箔式应变片性能—单臂电桥??????????????????????????????????????????????????????????????????????1 1 .1 实验目的????????????????????????????????????????????????????????????????????????????????????????????????????????1 1. 2 实验原理????????????????????????????????????????????????????????????????????????????????????????????????????????1 1. 3 实验原理????????????????????????????????????????????????????????????????????????????????????????????????????????1 1. 4 实验步骤????????????????????????????????????????????????????????????????????????????????????????????????????????1 1. 5 注意事项????????????????????????????????????????????????????????????????????????????????????????????????????????3 1. 6试验数据?????????????????????????????????????????????????????????????????????????????????????????????????????????3
压力传感器标定与校准
压力传感器检定: 1. 静态检定 2. 动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的 主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般 我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为 其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样 的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快 速变化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很 好地追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态 误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。 压力传感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来 描述。 线性度eL (非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的 吻合 程度; A x )00% y^s 重复性eR :正行程或反行程曲线多次测量时曲线的一致程度; 置信系数 a=2( 95.4%)或 a=3( 99.73%) 迟滞eH 正行程与反行程之间的曲线的不重合度;
dp =± _ % 线性度、迟滞反映 系统误差;重复性反映 偶然误差 根据检定规程一 《压力传感器静态》, 在校准精密 线性压力传 感器时给出 的校准曲 线有二种最小二乘直线和端点平移线。 动态检定: 1. 瞬态激励法(阶跃信号激励) 2. 正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时 间、过冲量、灵敏度。 正弦激励法:正弦压力信号输入法是一种间接的检定方法,即被检定的压力传感器和 一个“参考”压力传感器相比较,而“参考”压力传感器具有理想的动态性能。正弦 压力激励法在高 频、高压时,正弦信号往往严重畸变。因此一般只能用于小压力或低 频围的检定。 xlOO% 贝塞尔公式 误差(三者反应系统总误 差)
传感器与检测技术实验报告
“传感器与检测技术”实验报告 学号: 913110200229 姓名:杨薛磊 序号: 83
实验一电阻应变式传感器实验 (一)应变片单臂电桥性能实验 一、实验目的:了解电阻应变片的工作原理与应用并掌握应变片测量电路。 二、基本原理:电阻应变式传感器是在弹性元件上通过特定工艺粘贴电阻应变片来组成。一种利用电阻材料的应变效应将工程结构件的内部变形转换为电阻变化的传感器。此类传感器主要是通过一定的机械装置将被测量转化成弹性元件的变形,然后由电阻应变片将弹性元件的变形转换成电阻的变化,再通过测量电路将电阻的变化转换成电压或电流变化信号输出。它可用于能转化成变形的各种非电物理量的检测,如力、压力、加速度、力矩、重量等,在机械加工、计量、建筑测量等行业应用十分广泛。 三、需用器件与单元:主机箱中的±2V~±10V(步进可调)直流稳压电源、±15V直流 1位数显万用表(自备)。 稳压电源、电压表;应变式传感器实验模板、托盘、砝码; 4 2 四、实验步骤: 应变传感器实验模板说明:应变传感器实验模板由应变式双孔悬臂梁载荷传感器(称重传感器)、加热器+5V电源输入口、多芯插头、应变片测量电路、差动放大器组成。实验模板中的R1(传感器的左下)、R2(传感器的右下)、R3(传感器的右上)、R4(传感器的左上)为称重传感器上的应变片输出口;没有文字标记的5个电阻符号是空的无实体,其中4个电阻符号组成电桥模型是为电路初学者组成电桥接线方便而设;R5、R6、R7是350Ω固定电阻,是为应变片组成单臂电桥、双臂电桥(半桥)而设的其它桥臂电阻。加热器+5V是传感器上的加热器的电源输入口,做应变片温度影响实验时用。多芯插头是振动源的振动梁上的应变片输入口,做应变片测量振动实验时用。
传感器实训心得体会.doc
传感器实训心得体会 篇一:传感器实训心得 实训报告 学了一学期的传感器实训心得体会)传感器,在最后期末的时候我们也参加了传感器这一学科的实训,收获还是颇多。 在做测试技术的实验前,我以为不会难做,就像以前做物理实验一样,做完实验,然后两下子就将实验报告做完.直到做完测试实验后,才知道其实并不容易做,但学到的知识与难度成正比,使我们受益匪浅.做实验时,最重要的是一定要亲力亲为,务必要将每个步骤,每个细节弄清楚,弄明白,这样,也会有事半功倍的效果。 实验就是使我们加深理解所学基础知识,掌握各类典型传感器、记录仪器的基本原理和适用范围;具有测试系统的选择及应用能力;具有实验数据处理和误差分析能力;得到基本实验技能的训练与分析能力的训练,使我们初步掌握测试技术的基本方法,具有初步独立进行机械工程测试的能力,对各门知识得到融会贯通的认识和掌握,加深对理论知识的理解。更重要的是能够提高我们的动手能力。 这次实习的却让我加深了对各种传感器的了解和它们各自的原理,而且还培养我们分析和解决实际问题的能力。 在做实验的时候,连接电路是必须有的程序,也是最重要的,而连接电路时最重要的就是细心。我们俩最开始做实验的时候,并没有多注意,还是比较细心,但当我们把电路连接好通电后发现我们并不能得到数据,不管怎么调节都不对,后来才知道是我们电路连接错了,然
后我们心里也难免有点失落,因为毕竟是辛辛苦苦连了这么久的电路居然是错了,最后我们就只有在认真检查一次,看错啊你处在哪里。有了这次的经验下次就更加细心了。以上就是我们组两人对这次实训最大的感触,下次实训虽然不是一样的学科,但实验中的经验和感受或许会有相似的,我们会将这次的经验用到下次,经验不断积累就是我们实训最大的收获。 篇二:传感器实训报告 上海第二工业大学 传感器与测试技术技能实习 专业:机械电子工程 班级:10机工A2 姓名: 学号: 指导老师:杨淑珍 日期:2013年6月24日~7月7日 项目五:转子台转速测量及振动监控系统。 (一)内容 设计一个转子台的振动检测系统,能实时测量转子台工作时的振动信号(振幅)并实时显示转速,当振幅超过规定值时,报警。具体要求: 1.能测量振动信号并显示波形,若振动超过限值,报警(软硬件报警); 2.能测量并显示转子的转速; 3.限值均由用户可设定(最好以对话框方式设置,软件重新打开后,能记住上次的设置结果);
大学物理实验-温度传感器实验报告
关于温度传感器特性的实验研究 摘要:温度传感器在人们的生活中有重要应用,是现代社会必不可少的东西。本文通过控制变量法,具体研究了三种温度传感器关于温度的特性,发现NTC电阻随温度升高而减小;PTC电阻随温度升高而增大;但两者的线性性都不好。热电偶的温差电动势关于温度有很好的线性性质。PN节作为常用的测温元件,线性性质也较好。本实验还利用PN节测出了波 尔兹曼常量和禁带宽度,与标准值符合的较好。 关键词:定标转化拟合数学软件 EXPERIMENTAL RESEARCH ON THE NATURE OF TEMPERATURE SENSOR 1.引言 温度是一个历史很长的物理量,为了测量它,人们发明了许多方法。温度传感器通过测温元件将温度转化为电学量进行测量,具有反应时间快、可连续测量等优点,因此有必要对其进行一定的研究。作者对三类测温元件进行了研究,分别得出了电阻率、电动势、正向压降随温度变化的关系。 2.热电阻的特性 2.1实验原理 2.1.1Pt100铂电阻的测温原理 和其他金属一样,铂(Pt)的电阻值随温度变化而变化,并且具有很好的重现性和稳定性。利用铂的此种物理特性制成的传感器称为铂电阻温度传感器,通常使用的铂电阻温度传感器零度阻值为100Ω(即Pt100)。铂电阻温度传感器精度高,应用温度范围广,是中低温区(-200℃~650℃)最常用的一种温度检测器,本实验即采用这种铂电阻作为标准测温器件来定标其他温度传感器的温度特性曲线,为此,首先要对铂电阻本身进行定标。 按IEC751国际标准,铂电阻温度系数TCR定义如下: TCR=(R100-R0)/(R0×100) (1.1) 其中R100和R0分别是100℃和0℃时标准电阻值(R100=138.51Ω,R0=100.00Ω),代入上式可得到Pt100的TCR为0.003851。 Pt100铂电阻的阻值随温度变化的计算公式如下: Rt=R0[1+At+B t2+C(t-100)t3] (-200℃ 磁通量传感器索力监测系统 设计使用指南 柳州欧维姆结构检测技术有限公司 目录 前言 (3) 1. 磁通量传感器原理 (4) 2. 磁量传感器的技术特点 (4) 3. 主要技术指标 (5) 4. 磁通量传感器的应用 (5) 5、磁通量传感器索力监测系统 (8) 6. 索力监测系统的配置 (10) 7. 传感器选型与安装 (12) 8. 磁通量传感器监测系统建立过程及注意事项 (14) 9. 主要工程业绩 (15) 前言 拉索是缆索支承型桥梁的核心构件之一,素有“生命线”之称,其服役状况直接关系到桥梁的安全运营与使用寿命。因此,对桥梁拉索进行安全监测,及时了解拉索和桥梁的服役状态是十分必要的。拉索的安全监测,主要是通过监测拉索的索力,来判断其使用状况,评定其安全性。一方面,一根拉索的损伤变化会在其本身的索力变化和相邻索力的变化上表现出来,在外部则表现为主梁挠度发生变化;另一方面,主梁或塔的损伤变化也会引起索力的变化。通过对索力的监测,不仅能为总体评价其技术状况提供依据,同时也可以在一定程度上发现拉索锚固系统、防护系统是否完好,也可以更好地理解桥梁结构机理,验证设计理论从而指导设计。 索力监测所应用的传感器技术主要有:振动频率法、压力传感器(振弦式、应变片、液压式、光纤光栅)、磁通量传感器(EM sensor)等。各种索力测量方法,各有其特点,振动频率法是通过建立拉索的简化模型,实测拉索的振动频率,经过计算间接得出索力,因为受减震器、拉索实际长度、外护套等影响,其测量精度比较差。压力型传感器是比较传统的传感器技术,需要串接在受力结构中,将传递到传感器上面的力直接测量出来,短期精度高、动态性好,但由于受荷载长期作用、材料徐变、形变传递失真等方面的影响,耐久性和长期精度很难保证,在受力状态下无法重新校准,无法更换,因此压力型的传感器用于长期监测有一定的局限性,只能在桥梁建设或换索时预装。 针对传统的传感器技术的局限,磁通量传感器(EM Sensor)较好地解决了这些问题: 1、通过非接触式测量解决传感器受力疲劳影响寿命问题; 2、用模拟标定来实现运营状态的数据校准; 3、可以设计成哈弗式传感器,直接在已受力的拉索上制作及安装,实现运 营中桥梁拉索的索力监测。 4、可以实现体内预应力(有粘结)多截面应力监测。 传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日 实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图 9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。 五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。 实验一应变式传感器的系统标定与测量 一、实验目的 1. 通过对应变式压力传感器标定实验,使学生了解传感器标定系统的一般组成; 2. 了解油压标定机工作原理、使用方法; 3. 熟悉电阻应变仪和电子示波器的使用方法; 4. 掌握传感器静态标定的一般步骤和静态压力测试的步骤; 5. 掌握传感器静态特性中线性度和灵敏度两参数的计算方法,并能根据传感器的静态特性将测试数据转换为压力。 二、实验仪器设备 1.动态电阻应变仪BZ2203; 2.模拟示波器V-1060; 3.拉压力传感器BLR—1型。 三、实验步骤 1.传感器标定系统连接调试 实验用应变式压力传感器的压力测量量程为0-20Mpa,在了解油压标定机工作原理、电阻应变仪和电子示波器使用方法的基础上,将安装于油压标定机上的应变式压力传感器的引线与电阻应变仪和电子示波器连接成一个完整的测试系统,将电阻应变仪和电子示波器的相关旋钮调整到相应位置。连接好后,由实验指导老师检查连接及仪器参数的选择是否正确、合理,然后在传感器的量程范围内进行标定,并记录相关数据。 2.传感器的标定 在压力传感器的量程范围内,根据油压标定机的砝码与压力的转换关系,选择五组砝码组合,依次加在油压标定机上,由电子示波器读出相应的显示电压值,并记录电阻应变仪的增益倍数。 3.实验数据处理 1)绘制校准曲线并计算线性误差 以标定时所记录的输入压力和输出电压分别为横坐标和纵坐标绘制压力传感器的校准曲线,并计算测量值于端基直线的线性误差: 线性误差=100?A B % 其中:B —校准曲线于端基直线的最大偏差; A —输出值的范围。 2)计算相邻两压力之间的灵敏度 传感器在相邻两压力之间的灵敏度s i 由以下公式求得: p U s i i i ??= 其中:U i ?--标定相邻两压力对应的输出电压的差值 p i ?--标定时相邻压力的差值。 3)计算传感器的平均灵敏度 传感器的平均灵敏度S -可由以下公式求得: 111-=∑--n n i S S 其中:n —标定时测量的点数。 根据所计算的平均灵敏度,将压力测量时所记录的电压值转化为压力值。将所测压力与油压标定机的对应压力进行比较,分析出现误差的原因,并提出改进意见。 四、实验数据处理 1.模拟示波器标定 记录数据如下: 铁片数目 格数 序号 铁片数目 示波器格数 1 2 3 2 4 6 3 6 9 4 8 12 5 10 15 燃气联试系统在正式工作之前要进行传感器校标;若测试现场环境发生变化,用户更有必要对传感器重新校标。 本系统用到的传感器有侧燃压力传感器和燃气压力传感器。 1.传感器校标特征图 图5.9 传感器校标特征 2.传感器校标计算公式 标定线的各点压强值对应的高度:(此处侧燃n =7,燃气n =8) 0h =4 04030201h h h h +++ 1h = 414131211h h h h +++ … … n h =2 21n n h h + (5-11) 定义各点压强对应的实际高度:(此处侧燃n =7,燃气n =8) 1P 时,1h -0h =△1h 2P 时,2h -0h =△2h … … n P 时,n h -0h =△n h (5-12) 计算各标定压强间隔的内插系数:(此处侧燃n =7,燃气n =8) 1k =1 1h △P 2k = 2121 h - h P P -?? … … n k =1 -n n 1h -△h △--n n P P (5-13) 标定压强值求法: m P =1-n P +n K (m H -△1-n h ) (5-14) 其中,m H 为曲线上m 点至零线的高度; n K 为△1-n h 和△n h 之间的换算内插系数; 1-n P 为对应于△1-n h 的压强标定值; m P 为对应m H 高度求得的压强值。 传感器非线性计算公式: △h h △n △h n i n -i ╳100% (5-15) 其中,n 为标定线上的最大台阶数; △n h 为最大标定高度; i h △为第i 阶段的标定高度; i 为标定线是任一个阶梯(i =1、2、3…n ) 计算各点值,取其最大值表示传感器非线性值。 传感器滞后性(迟滞)参数计算公式: i2i1i4i3n 1(h -h h -h ) 4h ??+???╳100% (5-16) 传感器综合实验报告( 2012-2013年度第二学期) 名称:传感器综合实验报告 题目: 利用传感器测量重物质量院系:自动化系 班级:测控1201 班 小组成员:加桑扎西,黄承德 学生:加桑扎西 指导教师:仝卫国 实验周数:1周 成绩: 日期:2015 年7 月12日 传感器综合实验报告 一、实验目的 1、了解各种传感器的工作原理与工作特性。 2、掌握多种传感器应用于电子称的原理。 3、根据不同传感器的特性,选择不同的传感器测给定物体的重量。 4、能根据原理特性分析结果,加深对传感器的认识与应用。 5、测量精度要求达到1%。 二、实验设备、器材 1、金属箔式应变片传感器用到的设备: 直流稳压电源、双平行梁、测微器、金属箔式应变片、标准电阻、差动放大器、直流数字电压表。 2、电容式传感器用到的设备: 电容传感器、电容变换器、差动放大器、低通滤波器、电压表、示波器。 3、电涡流式传感器用到的设备: 电涡流式传感器、测微器、铝测片、铁测片、铜测片、电压表、示波器。 三、传感器工作原理 1、电容式传感器的工作原理: 电容器的电容量C是的函数,当被测量变化使S、d或 任意一个参数发生变化时,电容量也随之而变,从而可实现由被测量到电容量的转换。电容式传感器的工作原理就是建立在上述关系上的,若保持两个参数不变,仅改变另一参数, 就可以把该参数的变化转换为电容量的变化,通过测量电路再转换为电量输出。 差动平行变面积式传感器是由两组定片和一组动片组成。当安装于振动台上的动片上、下改变位置,与两组静片之间的相对面积发生变化,极间电容也发生相应变化,成为差动电容。如将上层定片与动片形成的电容定为C X1,下层定片与动片形成的电容定为C X2,当将C X1和C X2接入双T型桥路作为相邻两臂时,桥路的输出电压与电容量的变化有关,即与振动台的位移有关。依据该原理,在振动台上加上砝码可测定重量与桥路输出电压的对应关系,称未知重量物体时只要测得桥路的输出电压即可得出该重物的重量。 2、电涡流式传感器的工作原理: 电涡流式传感器由平面线圈和金属涡流片组成,当线圈中通以高频交变电流后,与其平行的金属片上感应产生电涡流,电涡流的大小影响线圈的阻抗Z,而涡流的大小与金属涡流片的电阻率、导磁率、厚度、温度以及与线圈的距离X有关。当平面线圈、被测体(涡流片)、激励源已确定,并保持环境温度不变,阻抗Z只与X距离有关。将阻抗变化经涡流变换器变换成电压V输出,则输出电压是距离X的单值函数。依据该原理可制成电涡流式传感器电子称。3、金属箔式应变片传感器工作原理: 应变片应用于测试时,应变片要牢固地粘贴在测试体表面,当测件受力发生形变,应变片的敏感栅随同变形,其电阻值也随之发生相应的变化。通过测量电路,转换成电信号输出显示。 实验中,通过旋转测微器可使双平梁的自由端上、下移动,从而使应变片的受力情况不同,将应变片接于电桥中即可使双平衡的位移转换为电压输出。电桥的四个桥臂电阻R1、R2、R3、R4,电阻的相对变化率分别为△R1/R1、△ 五邑大学 《传感器与电测技术》 实验报告 实验时间:2016年11月16日-17日实验班级:班 实验报告总份数: 4 份 实验教师: 信息工程学院(系) 611 实验室 __交通工程_____专业 班 学号 姓名_______协作者______________ 成绩: 实验一熟悉IAR 集成开发环境下C程序的编写 一.实验目的 1、了解IAR 集成开发环境的安装。 2、掌握在IAR 环境下程序的编辑、编译以及调试的方法。 二.实验设备 1、装有IAR 开发环境的PC 机一台 2、物联网开发设计平台所配备的基础实验套件一套 3、下载器一个 三.实验要求 1、熟悉IAR 开发环境 2、在IAR 开发环境下编写、编译、调试一个例程 3、实验现象节点扩展板上的发光二极管 D9 被点亮 三、问题与讨论 根据提供的电路原理图等资料,修改程序,点亮另一个LED 灯D8。(分析原理,并注释。) 先定义IO口,再初始化,最后点亮 一、实验目的与要求 1、理解光照度传感器的工作原理 2、掌握驱动光照度传感器的方法 二、实验设备 1、装有IAR 开发工具的PC 机一台 2、下载器一个 3、物联网开发设计平台一套 三、实验要求 1、编程要求:编写光照度传感器的驱动程序 2、实现功能:检测室内的光照度 3、实验现象:将检测到的数据通过串口调试助手显示,用手遮住传感器,观察数据变化。 四、实验讨论 讨论:光敏电阻的工作原理?光敏电阻是否为线性测量元件,为什么?常用于什么测量场合? 1.它的工作原理是基于光电效应。在半导体光敏材料两端装上电极引线,将其 封装在带有透明窗的管壳里就构成光敏电阻。为了增加灵敏度,两电极常做成梳状。半导体的导电能力取决于半导体导带内载流子数目的多少。当光敏电阻受到光照时,价带中的电子吸收光子能量后跃迁到导带,成为自由电子,同时产生空穴,电子—空穴对的出现使电阻率变小。光照愈强,光生电子—空穴对就越多,阻值就愈低。当光敏电阻两端加上电压后,流过光敏电阻的电流随光照增大而增大。入射光消失,电子-空穴对逐渐复合,电阻也逐渐恢复原值,电流也逐渐减小 2.不是线性测量元件,可以说光敏电阻在照度固定时是线性的。光敏电阻的阻 值随光照的增强而减少,但这个关系不是线性的。 3.常用作开关式光电转换器 温度传感器实验 姓名学号 一、目的 1、了解各种温度传感器(热电偶、铂热电阻、PN 结温敏二极管、半导体热敏电阻、集成温度传感器)的测温原理; 2、掌握热电偶的冷端补偿原理; 3、掌握热电偶的标定过程; 4、了解各种温度传感器的性能特点并比较上述几种传感器的性能。 二、仪器 温度传感器实验模块 热电偶(K 型、E 型) CSY2001B 型传感器系统综合实验台(以下简称主机) 温控电加热炉 连接电缆 万用表:VC9804A,附表笔及测温探头 万用表:VC9806,附表笔 三、原理 (1)热电偶测温原理 由两根不同质的导体熔接而成的闭合回路叫做热电回路,当其两端处于不同温度时则回路中产生一定的电流,这表明电路中有电势产生,此电势即为热电势。 图1中T 为热端,To 为冷端,热电势 本实验中选用两种热电偶镍铬—镍硅(K 分度)和镍铬—铜镍(E 分度)。 (2)热电偶标定 以K 分度热电偶作为标准热电偶来校准E 分度热电偶,被校热电偶热电势与标准热电偶热电势的误差为 式中:——被校热电偶在标定点温度下测得的热电势平均值。 ——标准热电偶在标定点温度下测得的热电势平均值。 ——标准热电偶分度表上标定温度的热电势值。 ——被校热电偶标定温度下分度表上的热电势值。 ——标准热电偶的微分热电势。 (3)热电偶冷端补偿 热电偶冷端温度不为0℃时,需对所测热电势值进行修正,修正公式为: E(T,To)=E(T,t1)+E(T1,T0) 即:实际电动势=测量所得电势+温度修正电势 (4)铂热电阻 铂热电阻的阻值与温度的关系近似线性,当温度在0℃≤T≤650℃时, 式中:——铂热电阻T℃时的电阻值 ——铂热电阻在0℃时的电阻值 A——系数(=3.96847×10-31/℃) B——系数(=-5.847×10-71/℃2) 将铂热电阻作为桥路中的一部分在温度变化时电桥失衡便可测得相应电路的输出电压变化值。 (5)PN结温敏二极管 半导体PN 结具有良好的温度线性,根据PN 结特性表达公式 可知,当一个PN 结制成后,其反向饱和电流基本上只与温度有关,温度每升高一度,PN 结正向压降就下降2mv,利用PN 结的这一特性可以测得温度的变化。 (6)热敏电阻 热敏电阻是利用半导体的电阻值随温度升高而急剧下降这一特性制成的热敏元件。它呈负温度特性,灵敏度高,可以测量小于0.01℃的温差变化。图2为金属铂热电阻与热敏电阻温度曲线的比较。 “传感器与检测技术”实验报告 学号:913110200229 姓名:杨薛磊 序号:83 实验一电阻应变式传感器实验 (一)应变片单臂电桥性能实验 一、实验目的:了解电阻应变片的工作原理与应用并掌握应变片测量电路。 二、基本原理:电阻应变式传感器是在弹性元件上通过特定工艺粘贴电阻应变片来组成。一种利用电阻材料的应变效应将工程结构件的内部变形转换为电阻变化的传感器。此类传感器主要是通过一定的机械装置将被测量转化成弹性元件的变形,然后由电阻应变片将弹性元件的变形转换成电阻的变化,再通过测量电路将电阻的变化转换成电压或电流变化信号输出。它可用于能转化成变形的各种非电物理量的检测,如力、压力、加速度、力矩、重量等,在机械加工、计量、建筑测量等行业应用十分广泛。 三、需用器件与单元:主机箱中的±2V~±10V(步进可调)直流稳压电源、±15V直流 1位数显万用表(自备)。 稳压电源、电压表;应变式传感器实验模板、托盘、砝码; 4 2 四、实验步骤: 应变传感器实验模板说明:应变传感器实验模板由应变式双孔悬臂梁载荷传感器(称重传感器)、加热器+5V电源输入口、多芯插头、应变片测量电路、差动放大器组成。实验模板中的R1(传感器的左下)、R2(传感器的右下)、R3(传感器的右上)、R4(传感器的左上)为称重传感器上的应变片输出口;没有文字标记的5个电阻符号是空的无实体,其中4个电阻符号组成电桥模型是为电路初学者组成电桥接线方便而设;R5、R6、R7是350Ω固定电阻,是为应变片组成单臂电桥、双臂电桥(半桥)而设的其它桥臂电阻。加热器+5V是传感器上的加热器的电源输入口,做应变片温度影响实验时用。多芯插头是振动源的振动梁上的应变片输入口,做应变片测量振动实验时用。 1、将托盘安装到传感器上,如图1—4所示。 图1—4 传感器托盘安装示意图 传感器与自动检测技术及实验 实验报告 院-系: 专业: 年级: 学生姓名: 学号: XXXXXXX 工学院实验报告单 课程名称 传感器与自动检测技术实验 成绩 实验名称 实验一 金属箔式应变片——单臂电 桥性能实验 日期 所在系 自动化 班级 所学专业 电气工程及其自动化 学号 姓名 同组人 一、实验目的: 了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。 二、实验原理: 电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为: εK R R =?/ 式中R R /?为电阻丝电阻的相对变化,K 为应变灵敏系数,l l /?=ε为电阻丝长度相对变化,金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位的受力状态变化,电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压U O1 4/εEK =。 三、实验仪器和设备: 应变式传感器实验模块、应变式传感器、砝码、数显表、±15V 电源、±4V 电源、万用表(自备)。 四、实验内容和步骤: 1、根据图1-1应变式传感器已装于应变传感器模块上。传感器中各应变片已接入模块的左上方的R 1、R 2、R 3、R 4。加热丝也接于模块上,可用万用表进行测量判别,R 1= R 2= R 3= R 4=350Ω,加热丝阻值为50Ω左右。 2、接入模块电源±15V (从主控箱引入),检查无误后,合上主控箱电源开关,将实验模块调节增益电位器Rw 3顺时针调节大致到中间位置,再进行差动放大器调零,方法为将差放的正、负输入端与地短接,输出端Vo2与主控箱面板上的数显表电压输入端Vi 相连,调节实验模块上调零电位器Rw 4,使数显表显示为零(数显表的切换开关打到2V 档)。关闭主控箱电源。 3、将应变式传感器的其中一个应变片R 1(即模块左上方的R 1)接入电桥作为一个桥臂与 R 5、R 6、R 7接成直流电桥(R 5、R 6、R 7模块内已连接好),接好电桥调零电位器Rw 1,接上桥路电源±4V (从主控箱引入)如图1-2所示。在电子秤上放上托盘,检查接线无误后,合上主控箱电源开关。调节Rw 1,使数显表显示为零。 压力传感器检定: 1.静态检定 2.动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快速变化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很好地追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。压力传感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来描述。 迟滞e H:正行程与反行程之间的曲线的不重合度; 线性度e L(非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的吻合程度; 重复性e R:正行程或反行程曲线多次测量时曲线的一致程度; 置信系数a=2(95.4%)或a=3(99.73%) 贝塞尔公式 线性度、迟滞反映系统误差;重复性反映偶然误差。 误差(三者反应系统总误差)e S:e S= 或 根据检定规程一《压力传感器静态》,在校准精密线性压力传感器时给出的校准曲线有二种最小二乘直线和端点平移线。 动态检定: 1.瞬态激励法(阶跃信号激励) 2.正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时间、过冲量、灵敏度。 正弦激励法:正弦压力信号输入法是一种间接的检定方法,即被检定的压力传感器和一个“参考”压力传感器相比较,而“参考”压力传感器具有理想的动态性能。正弦压力激励法在高频、高压时,正弦信号往往严重畸变。因此一般只能用于小压力或低频范围的检定。 无线传感器网络实验报告 Contiki mac协议与xmac协议的比较 1.简介 无线传感器网络(wireless sensor networks, WSN)节点由电池供电,其能力非常有限,同时由于工作环境恶劣以及其他各种因素,节点能源一般不可补充。因而降低能耗、延长节点使用寿命是所有无线传感器网络研究的重点。 WSN中的能量能耗主要包括通信能耗、感知能耗和计算能耗,其中通信能耗所占的比重最大,因此,减少通信能耗是延长网络生存时间的有效手段。同时,研究表明节点通信时Radio 模块在数据收发和空闲侦听时的能耗几乎相同,所以要想节能就需要最大限度地减少Radio 模块的侦听时间(收发时间不能减少),及减小占空比。 传统的无线网络中,主要考虑到问题是高吞吐量、低延时等,不需要考虑能量消耗,Radio 模块不需要关闭,所以传统无线网络MAC协议无法直接应用于WSN,各种针对传感器网络特点的MAC协议相继提出。现有的WSN MAC协议按照不同的分类方式可以 分成许多类型,其中根据信道访问策略的不同可以分为: X-MAC协议 X-MAC协议也基于B-MAC协议的改进,改进了其前导序列过长的问题,将前导序列分割成许多频闪前导(strobed preamble),在每个频闪前导中嵌入目的地址信息,非接收节点尽早丢弃分组并睡眠。 X-MAC在发送两个相邻的频闪序列之间插入一个侦听信道间隔,用以侦听接收节点的唤醒标识。接收节点利用频闪前导之间的时间间隔,向发送节点发送早期确认,发送节点收到早 期确认后立即发送数据分组,避免发送节点过度前导和接收节点过度侦听。 X-MAC还设计了一种自适应算法,根据网络流量变化动态调整节点的占空比,以减少单跳延时。 优点: X-MAC最大的优点是不再需要发送一个完整长度的前导序列来唤醒接收节点,因而发送延时和收发能耗都比较小;节点只需监听一个频闪前导就能转入睡眠。 缺点: 节点每次醒来探测信道的时间有所增加,这使得协议在低负载网络中能耗性比较差。而且分组长度、数据发送速率等协议参数还需进一步确定 X-MAC原理图如图3所示: ContikiMAC协议 一.ContikiMAC协议中使用的主要机制: 1.时间划分 《传感器与检测技术》 实验报告 姓名:学号: 院系:仪器科学与工程学院专业:测控技术与仪器实验室:机械楼5楼同组人员: 评定成绩:审阅教师: 传感器第一次实验 实验一 金属箔式应变片——单臂电桥性能实验 一、实验目的 了解金属箔式应变片的应变效应及单臂电桥工作原理和性能。 二、基本原理 电阻丝在外力作用下发生机械形变时,其电阻值发生变化,这就是电阻应变效应。 金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压 1/4o U EK ε=,其中K 为应变灵敏系数,/L L ε=?为电阻丝长度相对变化。 三、实验器材 主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。 四、实验步骤 1. 根据接线示意图安装接线。 2. 放大器输出调零。 3. 电桥调零。 4. 应变片单臂电桥实验。 050 100150200 246810x y untitled fit 1y vs. x 由matlab 拟合结果得到,其相关系数为0.9998,拟合度很好,说明输出电压与应变计上的质量是线性关系,且实验结果比较准确。 系统灵敏度 (即直线斜率),非线性误 差= = 五、思考题 单臂电桥工作时,作为桥臂电阻的应变片应选用:(1)正(受拉)应变片;(2)负(受压)应变片;(3)正、负应变片均可以。 答:(1)负(受压)应变片;因为应变片受压,所以应该选则(2)负(受压)应变片。 实验三 金属箔式应变片——全桥性能实验 一、实验目的 了解全桥测量电路的优点 实验一金属箔式应变片性能—单臂电桥 1、实验目的了解金属箔式应变片,单臂单桥的工作原理和工作情况。 2、实验方法在CSY-998传感器实验仪上验证应变片单臂单桥的工作原理 3、实验仪器CSY-998传感器实验仪 4、实验操作方法 所需单元及部件:直流稳压电源、电桥、差动放大器、双孔悬臂梁称重传感器、砝码、一片应变片、F/V表、主、副电源。 旋钮初始位置:直流稳压电源打倒±2V档,F/V表打到2V档,差动放大增益最大。 实验步骤: (1)了解所需单元、部件在实验仪上的所在位置,观察梁上的应变片,应变片为棕色衬底箔式结构小方薄片。上下二片梁的外表面各贴二片受力应变片。 (2)将差动放大器调零:用连线将差动放大器的正(+)、负(-)、地短接。将差动放大器的输出端与F/V表的输入插口Vi 相连;开启主、副电源;调节差动放大器的增益到最大位置,然后调整差动放大器的调零旋钮使F/V表显示为零,关闭主、副电源。 (3)根据图1接线R1、R2、R3为电桥单元的固定电阻。R4为应变片;将稳压电源的切换开关置±4V 档,F/V表置20V档。开启主、副电源,调节电桥平衡网络中的W1,使F/V表显示为零,等待数分钟后将F/V表置2V档,再调电桥W1(慢慢地调),使F/V表显示为零。 (4) 将测微头转动到10㎜刻度附近,安装到双平行梁的右端即自由端(与自由端磁钢吸合),调节测微头支柱的高度(梁的自由端跟随变化)使V/F表显示值最小,再旋动测微头,使V/F表显示为零(细调零),这时的测微头刻度为零位的相应刻度。 (5) 往下或往上旋动测微头,使梁的自由端产生位移记下V/F表显示的值,每旋动测微头一周即ΔX=0.5㎜,记一个数值填入下表: 0 0.5 1 1.5 2 2.5 3 3.5 4 位移 (mm) 51.0 63.3 75.5 88.2 102.3 113.7 127.3 139.9 155.1 电压 (mV) 压值的相应变化。 灵敏度:ΔV=155.1-51.0=104.1 ΔX=4-0=4 ΔS=ΔV/ΔX=104.1/4=26.025 (7)实验完毕,关闭主、副电源,所有旋钮转到初始位置。 注意事项: (1) 电桥上端虚线所示的四个电阻实际上并不存在,仅作为一标记,让学生组桥容易。 (2)如指示溢出,适当减小差动放大增益,此时差动放大器不必重调零。磁通量传感器索力监测系统设计指南
传感器测速实验报告(第一组)
测试技术实验报告应变式传感器的系统标定与测量
压力传感器标定
传感器综合的实验报告
传感器实验报告详解
温度传感器实验报告
传感器与检测技术实验报告
传感器试验报告.
压力传感器标定与校准
无线传感器网络实验报告
传感器检测技术实验报告
传感器实验报告