手把手教你学51单片机之十八RS485通信与Modbus协议
51单片机新手入门之Modbus通讯

51单片机新手入门之Modbus通讯本文和另一篇----C# WPF新手入门之Modbus通讯为一个系列,所用模块均是气体分析模块,之前用C3做的上位机(主要是方便调试,单片机不好搞),既然电脑上串口通讯代码没问题,那么放到单片机稍加修改也就理所当然肯定可行O(∩_∩)O~。
本文包括单片机的电路设计和软件设计两部分(单片机采用STC12C5A60S2双串口),至此单片机和上位机的串口通讯均成功实现,供需要的同学参考。
1.电路设计Altium Designer原理图如下:电源部分:24V转5V及6VAD及滤波Modbus通讯电脑串口通讯lcd屏显示预留接口,可以另接MAX232用来调试发送给模块数据正确性实际效果如下:电脑串口接收到的数据,和LCD 屏显示的是一样的下载步骤1. 选择芯片下载步骤2. 打开串口 下载步骤3. 打开hex 文件 下载步骤4. MCU 先断电,点击下载,看到提示后上电2.软件设计这里最麻烦的在于模块的Modbus通讯需要偶校验,我是手动添加的校验位,例如字符‘0’换成ASCII码0X30,添加偶校验后就是0X3A,把所有需要发送的数据一个个手动添加了再发送^_^;另外lcd12864屏也搞半天,主要照着时序图写必须sid先发送,然后sclk,不然不行 ̄□ ̄。
气体模块详细的通讯协议参考和上位机通讯那篇,此处不再介绍。
图中电路板没有焊AD芯片和温度芯片,引脚备用,相关代码注释掉了。
代码如下:#include "STC12C5A60S2.H"#include <intrins.H>.//头文件#define uchar unsigned char#define uint unsigned intuchar sendbuffer[17];//发送数据uchar flag=0;uchar re_buffer[32];uchar count=0;uint ad_data=0;double ad_vol=0;uint con_mid=0;uint gascon=0;long sum_o2=0;uint average_counter=20;uint idata oldtemp[21];uchar idata Send_Buff[20]; //moduleuint pre_contemp=0;uint O2_con=0;uchar idata test[21]; //moduleuint temperature=0;uint dat;uint testlcd=0;uchar c[]={0xb0,0xb1,0xb2,0xb3,0xb4,0xb5,0xb6,0xb7,0xb8,0xb9};//MAX1241 模数芯片引脚设置,此电路板我没焊^_^//sbit ADC_CS=P0^1;//sbit ADC_CLK=P0^0;//sbit ADC_DOUT=P0^2;sbit ADC_CS=P3^6;sbit ADC_CLK=P3^5;sbit ADC_DOUT=P3^7;//LCD12864 LCD屏幕引脚设置sbit cs=P2^2;sbit sid=P2^1;sbit sclk=P2^0;sbit DQ=P0^1; //DS18B20 温度引脚设置,依然没有…#define N 11#define N2 20void delayms(unsigned char t){unsigned char i;unsigned char j;for(j=t;j;j--)for(i=192;i;i--);/*1ms延时*/}void delayus(uint t){uint i;for(i=0;i<t;i++){_nop_();}}void delay(float sec){unsigned int i;unsigned int j;j=sec*100;while(j--){i=1561;while(--i);}}void UART1_init() //串口1初始化,此串口和电脑通讯{TMOD=0x20;/设置定时器工作方式2TH1=0xfd; //波特率9600TL1=0xfd;TR1=1;REN=1;SM0=0;SM1=1;//ES=1;}void UART2_init()//串口2初始化,和模块通讯 Modbus{S2CON= 0x50; //方式1,允许接收BRT = 0xf4; //波特率2400AUXR = AUXR |0X10; //允许独立波特率允许AUXR1 = AUXR1&0xef; //将uart2切换到P1口IE2 = IE2|0X01; //允许串口2中断}void UART1_Send (unsigned char UART_data)//{//ES=0;SBUF = UART_data; //将接收的数据发送回去while(TI!=1); //检查发送中断标志位TI = 0; //另发送中断标志位为0//ES=1;}void UART2_Send(unsigned char UART_data)//串口2发送{//ES = 0 ;S2BUF = UART_data;while((S2CON&0x02)!=0x02);S2CON &= ~0x02;//ES = 1 ;}void UART1_Send_String (char *str, char len)//串口1发送字符串{unsigned char i;for(i=0;i<=len;i++){UART1_Send(str[i]);}}void UART2_Send_String (char *str, char len) //串口2发送字符串{unsigned char i;for(i=0;i<=len;i++){UART2_Send(str[i]);}}unsigned char Creat_Addr(unsigned char adr, unsigned char position)//计算模块地址{unsigned char hich;unsigned char loch;hich = adr/16;loch = adr%16;if(hich>9)hich+=7;if(loch>9)loch+=7;if(position == 1){return hich+0x30;}else if(position == 0){return loch+0x30;}}unsigned char CheckSum(unsigned char *str, unsigned char position, uchar len)/计算校验码{uchar i;unsigned int sum=0;uchar hi, lo;//uchar len = 12;for(i = 1; i <= len; i ++){*str ++;sum += *str;}sum = 256-(sum%256);hi = sum/16;lo = sum%16;if(hi > 9)hi += 7;if(lo > 9)lo += 7;hi += 0x30;lo += 0x30;if(sum == 256)hi = lo = 0x30;if(position == 1){return hi;}else if(position == 0){return lo;}}void data_init(){sendbuffer[0]=0x5B;sendbuffer[1]=0x30;sendbuffer[2]=0x30;sendbuffer[3]=0x30;sendbuffer[4]=0x30;sendbuffer[5]=0x30;sendbuffer[6]=0x7C;sendbuffer[7]=0x30;sendbuffer[8]=0x30;sendbuffer[9]=0x30;sendbuffer[10]=0x30;sendbuffer[11]=0x30;//TEMsendbuffer[12]=0x30;sendbuffer[13]=0x30;sendbuffer[14]=0x5D;sendbuffer[15]=0x0D;sendbuffer[16]=0x0A;}void calculate_module(unsigned char str[])//lcd屏显示{unsigned int concen;uchar wan,qian,bai,shi,ge;/*uchar d4 = str[7]-48;uchar d3 = str[8]-48;uchar d2 = str[9]-48;uchar d1 = str[10]-48;*/ //浓度只需要后面部分 uchar d4 = str[24]-48;uchar d3 = str[25]-48;uchar d2 = str[26]-48;uchar d1 = str[27]-48;if(d4>9)d4-=7;if(d3>9)d3-=7;if(d2>9)d2-=7;if(d1>9)d1-=7;concen = d4*4096+d3*256+d2*16+d1;gascon=concen;wan=concen/10000;qian=concen%10000/1000;bai=concen%1000/100;shi=concen%100/10;ge=concen%10;//sendbuffer[6]=wan+0x30; //最终显示XXX.X%sendbuffer[7]=qian+0x30;sendbuffer[8]=bai+0x30;sendbuffer[9]=shi+0x30;sendbuffer[10]=ge+0x30;}void module_init()//气体模块初始化{Send_Buff[0] = ':';Send_Buff[3] = '0';Send_Buff[4] = '3';Send_Buff[5] = '0';Send_Buff[6] = '0';Send_Buff[7] = '0';Send_Buff[8] = 'A';Send_Buff[9] = '0';Send_Buff[10] = '0';Send_Buff[11] = '0';Send_Buff[12] = '1';Send_Buff[1] = Creat_Addr(31, 1);Send_Buff[2] = Creat_Addr(31, 0);Send_Buff[13] = CheckSum(Send_Buff, 1, 12);Send_Buff[14] = CheckSum(Send_Buff, 0, 12);Send_Buff[15] = 0x0D;Send_Buff[16] = 0x0A;//手动添加校验,例如字符‘0’换成ASCII码0X30,添加偶校验后就是0X3A,最终发送给模块的以下数据,地址被写死,这个不像C#做的一目了然O(∩_∩)Otest[0]=0X3A;test[1]=0XB1;test[2]=0XC6;test[3]=0X30;test[4]=0X33;test[5]=0X30;test[6]=0X30;test[7]=0X30;test[8]=0X41;test[9]=0X30;test[10]=0X30;test[11]=0X30;test[12]=0XB1;test[13]=0X39;test[14]=0XB4;test[15]=0X8D;test[16]=0X0A;}/*uint read_max1241() AD芯片处理{uint ADC_Data;uchar i;ADC_CLK=0;ADC_CS=0;ADC_Data=0;while(!ADC_DOUT);ADC_CLK=1;ADC_CLK=0;for(i=0;i<12;i++){ADC_CLK=1;ADC_Data<<=1;ADC_Data |= ADC_DOUT;ADC_CLK=0;}ADC_CS=1;ADC_CLK=0;return ADC_Data;}unsigned int ad_filter()//滤波{unsigned int count1,i,j;unsigned int value_buf[N];unsigned int temp;unsigned int sum=0;for (count1=0;count1<N;count1++){value_buf[count1] =read_max1241(); delayms(20);}for (j=0;j<(N-1);j++){for (i=0;i<(N-j);i++){if ( value_buf[i]>value_buf[i+1] ) {temp = value_buf[i];value_buf[i] = value_buf[i+1]; value_buf[i+1] = temp;}}}for(count1=3;count1<(N-3);count1++){sum += value_buf[count1];}return (unsigned int)(sum/(N-6));}void calculate_o2()//测试用{uchar wan,qian,bai,shi,ge;uint con_fin=0;uchar i;ad_data=ad_filter();ad_vol=(ad_data/4096.0)*2500.0;//Voltage ad_data=(uint)ad_vol; //concentrationdelayms(2);if(average_counter>0){sum_o2+= ad_data;oldtemp[average_counter-1]=ad_data;average_counter--;}else{sum_o2 -=oldtemp[19];for(i=20;i>0;i--){oldtemp[i]=oldtemp[i-1];}oldtemp[0]=ad_data;sum_o2+=oldtemp[0];con_fin=(uint)(sum_o2/N2);//O2_con=0.8*con_fin+0.2*pre_contemp;//pre_contemp=O2_con;wan=con_fin/10000;qian=con_fin%10000/1000;bai=con_fin%1000/100;shi=con_fin%100/10;ge=con_fin%10;sendbuffer[1]=wan+0x30;sendbuffer[2]=qian+0x30;sendbuffer[3]=bai+0x30;sendbuffer[4]=shi+0x30;sendbuffer[5]=ge+0x30;delayms(5);}}//-------------18B20 温度显示复位函数--------------- void ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;delayus(2);DQ=0; //delayus(550); // 550usDQ=1; //delayus(66); // 66uspresence=DQ;}delayus(500); //延时500uspresence = ~DQ;}DQ=1;}//-----------18B20写命令函数------------void write_byte(uchar val){uchar i;for (i=8; i>0; i--) //{DQ=1;delayus(2);DQ = 0;delayus(5);//5usDQ = val&0x01;delayus(66); //66usval=val/2;}DQ = 1;delayus(11);}//--------------18B20读一个字节函数---------uchar read_byte(void){uchar i;uchar value = 0;for (i=8;i>0;i--){DQ=1;delayus(2);value>>=1;DQ = 0;delayus(4); //4usDQ = 1;delayus(4); //4usif(DQ)value|=0x80;delayus(66); //66us}DQ=1;return(value);}void Read_Temperature(void){unsigned int Temp1,Temp2;uchar bai,shi,ge;ow_reset(); //DS18B20write_byte(0xCC);write_byte(0x44);ow_reset(); //DS1302复位write_byte(0xCC);write_byte(0xbe);Temp1=read_byte();Temp2=read_byte();ow_reset();temperature=(((Temp2<<8)|Temp1)*0.625); //0.0625=xx, 0.625=xx.x, 6.25=xx.xxbai=temperature/100;shi=temperature%100/10;ge=temperature%10;sendbuffer[11]=bai+0x30;sendbuffer[12]=shi+0x30;sendbuffer[13]=ge+0x30;delayms(5);}* //图中电路板此部分没焊,此部分代码不使用^_^void writecmd_lcd(uchar cmd) //lcd屏写指令{uchar i;uchar cmd1;cmd1=cmd;//----------先写控制,选择写指令,还是写数据11111000 for(i=0;i<5;i++) //必须sid先发送,然后sclk,不然不行 {sid=1;sclk=1;sclk=0;}for(i=0;i<3;i++){sid=0;sclk=1;sclk=0;}//delayms(10);cmd=cmd&0xf0; //先高4位for(i=0;i<8;i++){if(cmd&0x80){sid=1;}else sid=0;sclk=1;sclk=0;cmd=cmd<<1;}//delayms(10);cmd1=((cmd1<<4)&0xf0); //低4位 for(i=0;i<8;i++){if(cmd1&0x80){sid=1;}else sid=0;sclk=1;sclk=0;cmd1=cmd1<<1;}}void writedata_lcd(uchar dat) {uchar i;uchar dat1;dat1=dat;//11111010for(i=0;i<5;i++){sid=1;sclk=1;sclk=0;}sid=0;sclk=1;sclk=0;sid=1;sclk=1;sclk=0;sid=0;sclk=1;sclk=0;//delayms(10);dat=dat&0xf0;for(i=0;i<8;i++)if(dat&0x80){sid=1;}else sid=0;sclk=1;sclk=0;dat=dat<<1;}//delayms(10);dat1=((dat1<<4)&0xf0);for(i=0;i<8;i++){if(dat1&0x80){sid=1;}else sid=0;sclk=1;sclk=0;dat1=dat1<<1;}}void init_lcd()//初始化lcd屏{cs=1;writecmd_lcd(0x30);//设定为8位控制writecmd_lcd(0x0c);//显示打开writecmd_lcd(0x01);//清屏}void gotoxy(uint row, uint col){switch(row){case 1: writecmd_lcd(0x80+col);break; case 2: writecmd_lcd(0x90+col);break; case 3: writecmd_lcd(0x88+col);break; case 4: writecmd_lcd(0x98+col);break;}void clear(){writecmd_lcd(0x01);delayms(10);}void SendStr(uchar *str){uchar i;for(i=0;str[i]!='\0';i++){writedata_lcd(str[i]);}}void lcd_display(uint lcddata)//lcd屏显示浓度{uchar wan,qian,bai,shi,ge;wan=lcddata/10000;qian=lcddata%10000/1000;bai=lcddata%1000/100;shi=lcddata%100/10;ge=lcddata%10;gotoxy(2,1);writedata_lcd(0xa3);writedata_lcd(c[qian]);gotoxy(2,2);writedata_lcd(0xa3);writedata_lcd(c[bai]);gotoxy(2,3);writedata_lcd(0xa3);writedata_lcd(c[shi]);gotoxy(2,4);SendStr(".");gotoxy(2,5);writedata_lcd(0xa3);writedata_lcd(c[ge]);gotoxy(2,6);SendStr("%");}void main()//主函数{delay(2.1);UART1_init();UART2_init();data_init();module_init();init_lcd();EA=1;delay(2.1);while(1){/*calculate_o2();//测试用Read_Temperature();*/ //温度芯片没焊UART2_Send_String(test,16);//串口2:和模块通讯delay(0.8);if(flag==1){calculate_module(re_buffer);delayms(5);UART1_Send_String(sendbuffer,16);//串口1:电脑上可以接收发送的数据 flag=0;delay(0.8);}lcd_display(gascon);//lcd显示浓度delay(0.8);}}/*void uart1_in() interrupt 4/串口1中断,不使用,因为只是发送{RI=0;re_buffer[count]=SBUF;if(re_buffer[0]!=':'){count=0;}else{count++;if(count==10){flag=1;count=0;}}}*/void uart2_in() interrupt 8//串口2中断,需要接受模块返回的数据{if(S2CON&0X01){re_buffer[count]=S2BUF;re_buffer[count]&=0x7f;count++;S2CON&=0XFE;}if(count==32){count=0;flag=1;}}。
RS485通讯 modbus 协议

使用说明书 - 1 -_MODBUS 通讯协议说明一.通讯说明控制器采用RS-485总线,协议符合ModBus RTU 规约。
数据传输均采用8位数据位、1位停止位、无奇偶校验位。
波特率可设为1200-9600 bit/s 。
通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义与RTU 通讯规约相初始结构 = >=4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC 码结束结构 = >=4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus 通讯规约定义功能号为1到127。
本控制器利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位(比如功能码大于127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
CRC 码:二字节的错误检测码。
当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1 2.信息帧格式:(1) 地址码: 地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
每个从机都必须有唯一的地址码,并且只有符合地址码的从机才能响应回送。
当从机回送信息时,相当的地址码表明该信息来自于何处。
485通信程序(51单片机)

485通信程序(51单片机)什么是485通信?RS-485是一种串行通信协议,它使用差分信号传输数据。
485通信支持了在两个或以上设备之间传输数据的需求,比如用于电子计算机、通信设备、工业自动化等等。
RS-485已广泛应用于数控机床、自动化设备控制等领域中。
单纯的485通信包含四种通信模式:点对点、总线形、多主机和简介式通信。
其中,点对点通信指的是一对一的通信方式;总线形通信指的是一对多的群通信方式,所有设备都在同一条总线上发送和接收数据;多主机通信指的是多台主机的通信方式,多个设备都可以同时发送数据;简介式通信是一种用于仅需要发送少量数据的情况的通信方式。
下面介绍一下485通信的部分基本知识1.485通信的传输距离远,一般可以达到1200米。
2.485通信具有较强的抗干扰能力。
3.485通信使用差分信号进行传输,信号稳定,传输速率也比较快。
4.485通信可以支持多个设备同时进行通信,但是在同一时间内只有一个设备可发送数据。
5.在采用485通信时,一定要注意通讯端口的设置,如波特率、数据位、停止位等。
程序实现原理该程序使用了51单片机作为主控制器实现了基本的485通信,具体实现如下:1.通信模式的设置在程序开始时,需要设置通信模式。
如果通信模式为点对点通信,则可以直接使用UART通信模块进行通信;如果是多点通信,则需要使用485通信芯片。
2.通讯端口的配置在进行485通讯时,需要进行通讯端口的配置,包括波特率、数据位、停止位等参数的设定。
在485通信模式下,只有一个设备可为主设备,其他设备均为被设备。
在发送数据时,主设备的TXD口要与外部总线的D+口相连,而D-口不连接,从设备的TXD口要与D-口相连,而D+口不连接。
在接收数据时,主设备的RXD口要与D+口相连,而D-口不连接,从设备的RXD口要与D-口相连,而D+口不连接。
3.数据的发送和接收在发送和接收数据时,需要采用特定的方式进行报文的封装和解析。
51单片机串口485通讯程序
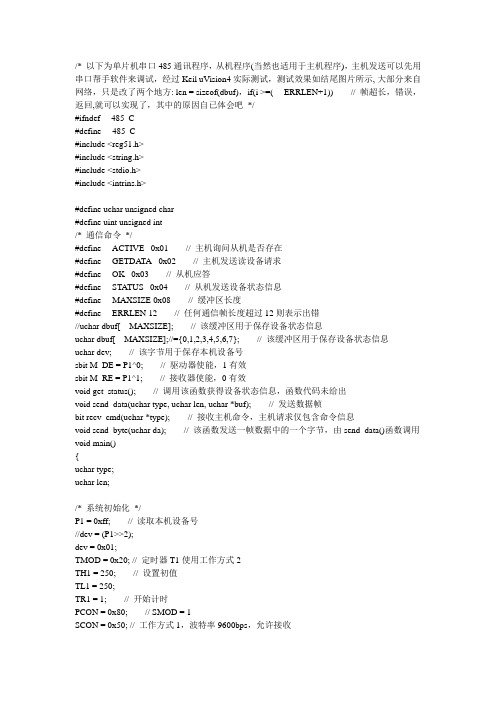
/* 以下为单片机串口485通讯程序,从机程序(当然也适用于主机程序),主机发送可以先用串口帮手软件来调试,经过Keil uVision4实际测试,测试效果如结尾图片所示, 大部分来自网络,只是改了两个地方: len = sizeof(dbuf),if(i >=( __ERRLEN+1)) // 帧超长,错误,返回,就可以实现了,其中的原因自已体会吧*/#ifndef __485_C__#define __485_C__#include <reg51.h>#include <string.h>#include <stdio.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int/* 通信命令*/#define __ACTIVE_ 0x01 // 主机询问从机是否存在#define __GETDATA_ 0x02 // 主机发送读设备请求#define __OK_ 0x03 // 从机应答#define __STATUS_ 0x04 // 从机发送设备状态信息#define __MAXSIZE 0x08 // 缓冲区长度#define __ERRLEN 12 // 任何通信帧长度超过12则表示出错//uchar dbuf[__MAXSIZE]; // 该缓冲区用于保存设备状态信息uchar dbuf[__MAXSIZE];//={0,1,2,3,4,5,6,7}; // 该缓冲区用于保存设备状态信息uchar dev; // 该字节用于保存本机设备号sbit M_DE = P1^0; // 驱动器使能,1有效sbit M_RE = P1^1; // 接收器使能,0有效void get_status(); // 调用该函数获得设备状态信息,函数代码未给出void send_data(uchar type, uchar len, uchar *buf); // 发送数据帧bit recv_cmd(uchar *type); // 接收主机命令,主机请求仅包含命令信息void send_byte(uchar da); // 该函数发送一帧数据中的一个字节,由send_data()函数调用void main(){uchar type;uchar len;/* 系统初始化*/P1 = 0xff; // 读取本机设备号//dev = (P1>>2);dev = 0x01;TMOD = 0x20; // 定时器T1使用工作方式2TH1 = 250; // 设置初值TL1 = 250;TR1 = 1; // 开始计时PCON = 0x80; // SMOD = 1SCON = 0x50; // 工作方式1,波特率9600bps,允许接收ES = 0; // 关闭串口中断//IT0 = 0; // 外部中断0使用电平触发模式//EX0 = 1; // 开启外部中断0EA = 1; // 开启中断/* 主程序流程*/while(1) // 主循环{if(recv_cmd(&type) == 0) // 发生帧错误或帧地址与本机地址不符,丢弃当前帧后返回continue;switch(type){case __ACTIVE_: // 主机询问从机是否存在send_data(__OK_, 0, dbuf); // 发送应答信息,这里buf的内容并未用到break;case __GETDA TA_:// len = strlen(dbuf);//在C51中不能这个函数计算unsigned char型,这个函数只能计算char型len = sizeof(dbuf);// len =0x08;send_data(__STA TUS_, len, dbuf); // 发送设备状态信息break;default:break; // 命令类型错误,丢弃当前帧后返回}}}void READSTATUS() interrupt 0 using 1 // 产生外部中断0时表示设备状态发生改变,该函数使用寄存器组1{get_status(); // 获得设备状态信息,并将其存入dbuf指向的存储区,数据最后一字节置0表示数据结束}/* 该函数接收一帧数据并进行检测,无论该帧是否错误,函数均会返回* 函数参数type保存接收到的命令字* 当接收到数据帧错误或其地址位不为0时(非主机发送帧),函数返回0,反之返回1*/bit recv_cmd(uchar *type){bit db = 0; // 当接收到的上一个字节为0xdb时,该位置位bit c0 = 0; // 当接收到的上一个字节为0xc0时,该位置位uchar data_buf[__ERRLEN]; // 保存接收到的帧__ERRLEN=12;uchar tmp;uchar ecc = 0;uchar i;M_DE = 0; // 置发送禁止,接收允许M_RE = 0;/* 接收一帧数据*/i = 0;while(!c0) // 循环直至帧接收完毕{RI = 0;while(!RI);tmp = SBUF;RI = 0;if(db == 1) // 接收到的上一个字节为0xdb{switch(tmp){case 0xdd:data_buf[i] = 0xdb; // 0xdbdd表示0xdbecc = ecc^0xdb;db = 0;break;case 0xdc:data_buf[i] = 0xc0; // 0xdbdc表示0xc0ecc = ecc^0xc0;db = 0;break;default:return 0; // 帧错误,返回}i++;}switch(tmp) // 正常情况{case 0xc0: // 帧结束c0 = 1;break;case 0xdb: // 检测到转义字符db = 1;break;default: // 普通数据data_buf[i] = tmp; // 保存数据ecc = ecc^tmp; // 计算校验字节i++;}//if(i == __ERRLEN) // 帧超长,错误,返回if(i >=( __ERRLEN+1)) // 帧超长,错误,返回return 0;}/* 判断帧是否错误*/if(i<4) // 帧过短,错误,返回return 0;if(ecc != 0) // 校验错误,返回return 0;if(data_buf[0] != dev) // 非访问本机命令,错误,返回return 0;*type = data_buf[1]; // 获得命令字return 1; // 函数成功返回}/* 该函数发送一帧数据帧,参数type为命令字、len为数据长度、buf为要发送的数据内容*/void send_data(uchar type, uchar len, uchar *buf){uchar i;uchar ecc = 0; // 该字节用于保存校验字节M_DE = 1; // 置发送允许,接收禁止M_RE = 1;send_byte(dev); // 发送本机地址ecc = dev;send_byte(type); // 发送命令字ecc = ecc^type;send_byte(len); // 发送长度ecc = ecc^len;for(i=0; i<len; i++) // 发送数据{send_byte(*buf);ecc = ecc^(*buf);buf++;}send_byte(ecc); // 发送校验字节TI = 0; // 发送帧结束标志SBUF = 0xc0;while(!TI);TI = 0;}/* 该函数发送一个数据字节,若该字节为0xdb,则发送0xdbdd,若该字节为0xc0则,发送0xdbdc */void send_byte(uchar da){switch(da){case 0xdb: // 字节为0xdb,发送0xdbdd TI = 0;SBUF = 0xdb;while(!TI);TI = 0;SBUF = 0xdd;while(!TI)TI = 0;break;case 0xc0: // 字节为0xc0,发送0xdbdcTI = 0;SBUF = 0xdb;while(!TI);TI = 0;SBUF = 0xdc;while(!TI)TI = 0;break;default: // 普通数据则直接发送TI = 0;SBUF = da;while(!TI);TI = 0;}}#endif/* 调试结果*/。
关于51单片机上实现modbus协议

关于51单片机上实现modbus协议你找一个MODBUS的协议详细资料好好看看,就是一种通讯约定,你按照它规定的格式通讯就可以了协议发送给询问方。
Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。
此协议定义了控制器能够认识和使用的消息结构,而不管它们是经过何种网络进行通信的。
标准的Modicon控制器使用RS232C实现串行的Modbus。
Modbus的ASCII、RTU协议规定了消息、数据的结构、命令和就答的方式,数据通讯采用Maser/Slave方式,Master端发出数据请求消息,Slave端接收到正确消息后就可以发送数据到Master端以响应请求;Master端也可以直接发消息修改Slave端的数据,实现双向读写。
Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC校验,RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP协议是一个面向连接的可靠协议。
另外,Modbus采用主从方式定时收发数据,在实际使用中如果某Slave站点断开后(如故障或关机),Master端可以诊断出来,而当故障修复后,网络又可自动接通。
因此,Modbus协议的可靠性较好。
下面我来简单的给大家介绍一下,对于Modbus的ASCII、RTU和TCP协议来说,其中TCP和RTU协议非常类似,我们只要把RTU协议的两个字节的校验码去掉,然后在RTU协议的开始加上5个0和一个6并通过TCP/IP网络协议发送出去即可。
所以在这里我仅介绍一下Modbus的ASCII和RTU协议。
下表是ASCII协议和RTU协议进行的比较:协议开始标记结束标记校验传输效率程序处理ASCII :(冒号)CR,LF LRC 低直观,简单,易调试RTU 无无CRC 高不直观,稍复杂通过比较可以看到,ASCII协议和RTU协议相比拥有开始和结束标记,因此在进行程序处理时能更加方便,而且由于传输的都是可见的ASCII字符,所以进行调试时就更加的直观,另外它的LRC校验也比较容易。
RS-485和Modbus通信协议及工作原理

RS-485和Modbus通信协议及工作原理在(工业控制)、电力通讯、(智能)仪表等领域,通常情况下是采用串口(通信)的方式进行数据交换。
最初采用的方式是(RS)232接口,由于(工业)现场比较复杂,各种(电气)设备会在环境中产生比较多的电磁千扰,会导致(信号)传输错误。
1979年施耐德电气制定了一个用于工业现场的总线协议Modbus协议,现在工业中使用RS485通信场合很多都采用Modbus 协议,所以今天我们来了解下RS485通信和Modbus通信协议。
什么是串口通信串口通信(Serial Communication),是指外设和计算机间,通过数据信号线、地线、控制线等,按位进行传输数据的一种通讯方式。
这种通信方式使用的数据线少,在远距离通信中可以节约通信成本,但其传输速度比并行传输低。
由于串行通信是在一根传输线上一位一位的传送信息,所用的传输线少,并目可以借助现成的电话网进行信息传送,因此,特别适合于远距离传输。
(RS-485)协议概述RS-485和RS-232一样,都是审行通信标准,现在的标准名称是(TI)A485/EIA-485-A,但是人们会习惯称为RS485标准,RS-485常用在工业、自动化、汽车和建筑物管理等领域。
RS-485总线弥补了RS-232通信距离短,速率低的缺点,RS-485的速率可高达10Mbit/s,理论通讯距离可达1200米;RS-485和RS-232的单端传输不一样是差分传输,使用一对双绞线,其中一根线定义为A,另一个定义为B。
通常情况下,RS485的信号在传送出去之前会先分解成正负对称的两条线路(即我们常说的A、B信号线),当到达接收端后,再将信号相减还原成原来的信号。
拓扑结构RS485有两线制和四线制两种接线,四线制只能实现点对点的通信方式,现很少采用,多采用的是两线制接线方式,这种接线方式为总线拓扑结构,在同一总线上最多可以挂接32个节点RS-485总线同12C总线一样支持主从模式,支持点对点单从机模式,也支持多从机模式,不支持多主机模式。
手把手教你学51单片机(C语言版)
12.3.1 常量和符 号常量
A
12.3.2 字符和字 符串数组实例
B
12 指针基础与1602液晶的初步认识
1
12.4.1 1602液晶的硬件接口 介绍
2
12.4.2 1602液晶的读写时序 介绍
3
12.4.3 1602液晶的指令介绍
4
12.4.4 1602液晶简单实例
01
8.1.1 电 源
02
8.1.2 晶 振
03
8.1.3 复 位电路
8.1 单片机最小系统
0 1
8.4.1 独立按
键
0 2
8.4.2 矩阵按
键
0 3
8.4.3 独立按
键的扫描
0 4
8.4.4 按键消
抖
0 5
8.4.5 矩阵按
键的扫描
8 函数进阶与按键
8.4 按键
10
Part One
9 步进电机与蜂鸣器
11.3 USB转串口 通信
11.4 IO口模拟 UART串口通信
11.5 UART串口 通信的基本应用
11.6 通信实例与 ASCII码
11 UART串口通 信
11.7 练习题
11.5.1 通信的三种基本类 型
11.5.3 UART串口程序
11 UART串口通信
11.5 UART串口通信的基本应用
10.1.3 字节操作修改位的 技巧
10.1.5 秒表程序
10 实例练习与经验积累
10.1 数字秒表实例
10.1.2 定时时间精准性调 整
10.1.4 数码管扫描函数算 法改进
12
Part One
485通讯协议程序怎么写(51单片机的485通信程序案例)

485通讯协议程序怎么写(51单片机的485通信程序案例)
RS-485总线接口是一种常用的串口,具有网络连接方便、抗干扰性能好、传输距离远等优点。
RS-485收发器采用平衡发送和差分接收,因此具有抑制共模干扰的能力,加上收发器具有高的灵敏度,能检测到低达200mv的电压,可靠通信的传输距离可达数千米。
使用RS-485总线组网,只需一对双绞线就可实现多系统联网构成分布式系统、设备简单、价格低廉、通信距离长。
51单片机的485通信程序
#ifndef __485_C__ #define __485_C__
#include 《reg51.h》
#include 《string.h》
#define unsigned char uchar
#define unsigned int uint
/* 通信命令*/
#define __ACTIVE_ 0x01 // 主机询问从机是否存在
#define __GETDATA_ 0x02 // 主机发送读设备请求
#define __OK_ 0x03 // 从机应答
#define __STATUS_ 0x04 // 从机发送设备状态信息
#define __MAXSIZE 0x08 // 缓冲区长度
#define __ERRLEN 12 // 任何通信帧长度超过12则表示出错
uchar dbuf[__MAXSIZE]; // 该缓冲区用于保存设备状态信息
uchar dev; // 该字节用于保存本机设备号
sbit M_DE = P1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在工业控制、电力通讯、智能仪表等领域,通常情况下是采用串口通信的方式进行数据交换。
最初采用的方式是 RS232 接口,由于工业现场比较复杂,各种电气设备会在环境中产生比较多的电磁干扰,会导致信号传输错误。
除此之外,RS232 接口只能实现点对点通信,不具备联网功能,最大传输距离也只能达到几十米,不能满足远距离通信要求。
而 RS485 则解决了这些问题,数据信号采用差分传输方式,可以有效的解决共模干扰问题,最大距离可以到1200 米,并且允许多个收发设备接到同一条总线上。
随着工业应用通信越来越多, 1979 年施耐德电气制定了一个用于工业现场的总线协议 Modbus 协议,现在工业中使用RS485 通信场合很多都采用 Modbus 协议,本节课我们要讲解一下 RS485 通信和Modbus 协议。
单单使用一块KST-51 开发板是不能够进行RS485 实验的,应很多同学的要求,把这节课作为扩展课程讲一下,如果要做本课相关实验,需要自行购买USB 转 485 通信模块。
18.1 RS485通信实际上在 RS485 之前 RS232 就已经诞生,但是RS232 有几处不足的地方:1、接口的信号电平值较高,达到十几V ,容易损坏接口电路的芯片,而且和TTL 电平不兼容,因此和单片机电路接起来的话必须加转换电路。
2、传输速率有局限,不可以过高,一般到几十Kb/s 就到极限了。
3、接口使用信号线和GND 与其他设备形成共地模式的通信,这种共地模式传输容易产生干扰,并且抗干扰性能也比较弱。
4、传输距离有限,最多只能通信几十米。
5、通信的时候只能两点之间进行通信,不能够实现多机联网通信。
针对 RS232 接口的不足,就不断出现了一些新的接口标准,RS485 就是其中之一,他具备以下的特点:1、我们在讲A/D 的时候,讲过差分信号输入的概念,同时也介绍了差分输入的好处,最大的优势是可以抑制共模干扰。
尤其工业现场的环境比较复杂,干扰比较多,所以通信如果采用的是差分方式,就可以有效的抑制共模干扰。
而RS485 就是一种差分通信方式,它的通信线路是两根,通常用 A 和B 或者D+ 和 D- 来表示。
逻辑“ 1”以两线之间的电压差为+(0.2~6)V 表示,逻辑“0”以两线间的电压差为-(0.2~6)V来表示,是一种典型的差分通信。
2、 RS485通信速度快,最大传输速度可以达到10Mb/s以上。
3、RS485 内部的物理结构,采用的是平衡驱动器和差分接收器的组合,抗干扰能力也大大增加。
4、传输距离最远可以达到1200 米左右,但是他的传输速率和传输距离是成反比的,只有在100Kb/s 以下的传输速度,才能达到最大的通信距离,如果需要传输更远距离可以使用中继。
5、可以在总线上进行联网实现多机通信,总线上允许挂多个收发器,从现有的RS485 芯片来看,有可以挂32、 64、 128、 256 等不同个设备的驱动器。
RS485 的接口非常简单,和RS232 所使用的MAX232是类似的,只需要一个RS485 转换器,就可以直接和我们单片机的UART 串行接口连接起来,并且完全使用的是和UART 一致的异步串行通信协议。
但是由于RS485 是差分通信,因此接收数据和发送数据是不能同时进行的,也就是说它是一种半双工通信。
那我们如何判断什么时候发送,什么时候接收呢?RS485 类的芯片很多,这节课我们以 MAX485 为例讲解 RS485 通信,如图 18-1 所示。
图18-1 MAX485 硬件接口MAX485 是美信 (Maxim) 推出的一款常用 RS485 转换器。
其中 5 脚和 8 脚是电源引脚, 6 脚和 7 脚就是 485 通信中的 A 和 B 两个引脚,而 1 脚和 4 脚分别接到我们单片机的RXD 和TXD 引脚上,直接使用单片机UART 进行数据接收和发送。
而 2 脚和 3 脚就是方向引脚了,其中 2 脚是低电平使能接收器, 3 脚是高电平使能输出驱动器。
我们把这两个引脚连到一起,平时不发送数据的时候,保持这两个引脚是低电平,让MAX485 处于接收状态,当需要发送数据的时候,把这个引脚拉高,发送数据,发送完毕后再拉低这个引脚就可以了。
为了提高 RS485 的抗干扰性能,需要在靠近 MAX485的 A 和 B 引脚之间并接一个电阻,这个电阻阻值从 100 欧到 1K 都可以。
在这里我们还要介绍一下如何使用KST-51 单片机开发板进行外围扩展实验。
我们的开发板只能把基本的功能给同学们做出来提供实验练习,但是同学们学习的脚步不应该停留在这个实验板上。
如果想进行更多的实验,就可以通过单片机开发板的扩展接口进行扩展实验。
大家可以看到蓝绿色的单片机座周围有32 个插针,这32 个插针就是把单片机的32个IO 引脚全部都引出来了。
在原理图上体现出来的就是我们的J4、J5、J6、 J7 这 4 个器件,如图18-2 所示。
图18-2 单片机扩展接口这32 个 IO 口不是所有的 IO 口都可以用来对外扩展,其中既作为数据输出,又可以作为数据输入的引脚是不可以用的,比如P3.2、 P3.4、P3.6 引脚,这三个引脚是不可用的。
比如P3.2 这个引脚,如果我们用来扩展,发送的信号如果和DS18B20 的时序吻合,会导致DS18B20 拉低引脚,影响通信。
除这 3 个 IO 口以外的其他 29 个 IO 口,都可以使用杜邦线接上插针,扩展出来使用。
当然了,如果把当前的IO 口应用于扩展功能了,板子上的相应的功能就实现不了了,也就是说需要扩展功能和板载功能二选一。
在进行 RS485 实验中,我们通信用的引脚必须是P3.0 和 P3.1,此外还有一个方向控制引脚,我们使用杜邦线将其连接到P1.7 上去。
RS485 的另外一端,大家可以使用一个USB 转 485模块,用双绞线把开发板和模块上的 A 和 B 分别对应连起来, USB 那头插入电脑,然后就可以进行通信了。
学习了第 13 章的实用串口通信的方法和程序后,做这种串口通信的方法就很简单了,基本是一致的。
我们使用实用串口通信的思路,做了一个简单的程序,通过串口调试助手下发任意个字符,单片机接收到后在末尾添加“回车+换行”符后再送回,在调试助手上重新显示出来,先把程序贴出来。
程序中需要注意的一点是:因为平常都是将485 设置为接收状态,只有在发送数据的时候才将485 改为发送状态,所以在 UartWrite() 函数开头将 485 方向引脚拉高,函数退出前再拉低。
但是这里有一个细节,就是单片机的发送和接收中断产生的时刻都是在停止位的一半上,也就是说每当停止位传送了一半的时候,RI或TI就已经置位并且马上进入中断(如果中断使能的话)函数了,接收的时候自然不会存在问题,但发送的时候就不一样了:当紧接这向SBUF写入一个字节数据时,UART硬件会在完成上一个停止位的发送后,再开始新字节的发送,但如果此时不是继续发送下一个字节,而是已经发送完毕了,要停止发送并将485方向引脚拉低以使485 重新处于接收状态时就有问题了,因为这时候最后的这个停止位实际只发送了一半,还没有完全完成,所以就有了UartWrite() 函数内 DelayX10us(5)这个操作,这是人为的增加了延时50us ,这 50us 的时间正好让剩下的一半停止位完成,那么这个时间自然就是由通信波特率决定的了,为波特率周期的一半。
/***********************RS485.c文件程序源代码*************************/#include <reg52.h>#include <intrins.h>sbit RS485_DIR = P1^7; //RS485方向选择引脚bit flagOnceTxd = 0; //单次发送完成标志,即发送完一个字节bit cmdArrived = 0;// 命令到达标志,即接收到上位机下发的命令unsigned char cntRxd = 0;unsigned char pdata bufRxd[40]; //串口接收缓冲区void ConfigUART(unsigned int baud) //串口配置函数,baud 为波特率{RS485_DIR = 0; //RS485设置为接收方向SCON = 0x50;//配置串口为模式1TMOD &= 0x0F; //清零T1的控制位TMOD |= 0x20; //配置T1为模式2TH1 = 256 - (11059200/12/32) / baud; //计算 T1 重载值TL1 = TH1;// 初值等于重载值ET1 = 0;// 禁止 T1 中断ES = 1;//使能串口中断TR1 = 1;//启动 T1}unsigned char UartRead(unsigned char *buf, unsigned char len) //串口数据读取函数,数据接收指针buf ,读取数据长度len ,返回值为实际读取到的数据长度{unsigned char i;if (len > cntRxd) //读取长度大于接收到的数据长度时,{len = cntRxd; //读取长度设置为实际接收到的数据长度}for (i=0; i<len; i++) //拷贝接收到的数据{*buf = bufRxd[ i];buf++;}cntRxd = 0; // 清零接收计数器return len; // 返回实际读取长度}void DelayX10us(unsigned char t) //软件延时函数,延时时间(t*10)us{do {_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();} while (--t);}void UartWrite(unsigned char *buf, unsigned char len) // 串口数据写入函数,即串口发送函数,待发送数据指针 buf ,数据长度 len{RS485_DIR = 1; //RS485设置为发送while (len--)//发送数据{flagOnceTxd = 0;SBUF = *buf;buf++;while (!flagOnceTxd);}DelayX10us(5); // 等待最后的停止位完成,延时时间由波特率决定RS485_DIR = 0; //RS485 设置为接收}void UartDriver() //串口驱动函数,检测接收到的命令并执行相应动作{unsigned char len;unsigned char buf[30];if (cmdArrived) //有命令到达时,读取处理该命令{cmdArrived = 0;len = UartRead(buf, sizeof(buf)-2); //将接收到的命令读取到缓冲区中buf[len++] = '\r';//在接收到的数据帧后添加换车换行符后发回buf[len++] = '\n';UartWrite(buf, len);}}void UartRxMonitor(unsigned char ms) //串口接收监控函数{static unsigned char cntbkp = 0;static unsigned char idletmr = 0;if (cntRxd > 0) //接收计数器大于零时,监控总线空闲时间{if (cntbkp != cntRxd) //接收计数器改变,即刚接收到数据时,清零空闲计时{cntbkp = cntRxd;idletmr = 0;}else{if (idletmr < 30) //接收计数器未改变,即总线空闲时,累积空闲时间{idletmr += ms;if (idletmr >= 30) //空闲时间超过30ms 即认为一帧命令接收完毕{cmdArrived = 1; //设置命令到达标志}}}}else{cntbkp = 0;}}void InterruptUART() interrupt 4 //UART中断服务函数{if (RI) // 接收到字节{RI = 0;//手动清零接收中断标志位if (cntRxd < sizeof(bufRxd)) //接收缓冲区尚未用完时,{bufRxd[cntRxd++] = SBUF; //保存接收字节,并递增计数器}}if (TI) // 字节发送完毕{TI = 0;//手动清零发送中断标志位flagOnceTxd = 1; //设置单次发送完成标志}}/***********************main.c文件程序源代码*************************/ #include <reg52.h>unsigned char T0RH = 0; //T0重载值的高字节unsigned char T0RL = 0; //T0重载值的低字节void ConfigTimer0(unsigned int ms);extern void ConfigUART(unsigned int baud);extern void UartRxMonitor(unsigned char ms);extern void UartDriver();void main (){EA = 1;// 开总中断ConfigTimer0(1); //配置T0定时1msConfigUART(9600); //配置波特率为9600while(1){UartDriver();}}void ConfigTimer0(unsigned int ms) //T0配置函数{unsigned long tmp;tmp = 11059200 / 12;//定时器计数频率tmp = (tmp * ms) / 1000; //计算所需的计数值tmp = 65536 - tmp;//计算定时器重载值tmp = tmp + 34;// 修正中断响应延时造成的误差T0RH = (unsigned char)(tmp >> 8); //定时器重载值拆分为高低字节T0RL = (unsigned char)tmp;TMOD &= 0xF0;// 清零 T0 的控制位TMOD |= 0x01;//配置T0为模式1TH0 = T0RH;// 加载T0 重载值TL0 = T0RL;ET0 = 1;// 使能T0 中断TR0 = 1;//启动T0}void InterruptTimer0() interrupt 1 //T0中断服务函数{TH0 = T0RH; //定时器重新加载重载值TL0 = T0RL;UartRxMonitor(1); //串口接收监控}现在看这种串口程序,是不是感觉很简单了呢?串口通信程序我们反反复复的使用,加上随着我们学习的模块越来越多,实践的越来越多,原先感觉很复杂的东西,现在就会感到简单了。