基于STK的卫星轨道预报
利用STK进行的在轨段仿真
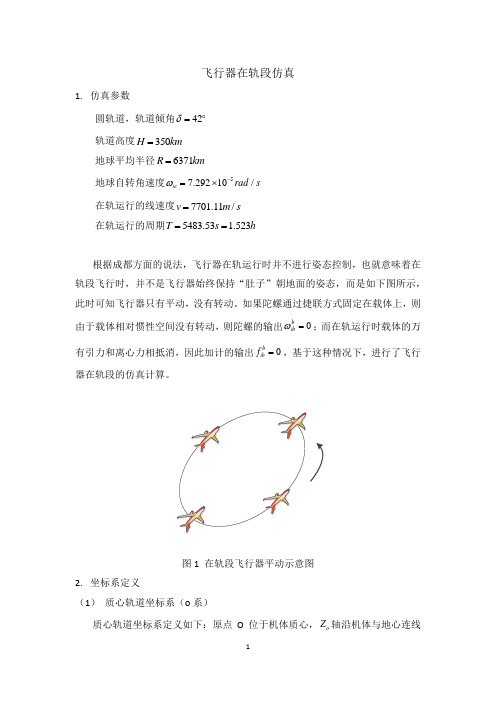
飞行器在轨段仿真1. 仿真参数圆轨道,轨道倾角42δ= 轨道高度350H km = 地球平均半径6371R km =地球自转角速度57.29210/ie rad s ω-=⨯ 在轨运行的线速度7701.11/v m s = 在轨运行的周期5483.53 1.523T s h ==根据成都方面的说法,飞行器在轨运行时并不进行姿态控制,也就意味着在则2. 坐标系定义(1) o 轴沿机体与地心连线方向,背离地心为正,o Y 轴在轨道平面内与Oz 轴垂直,向前为正,o X 轴通过右手定则确定指向。
图2 轨道坐标系定义图中,ϕ为纬度,k 为飞行器在轨道平面内的回转角度,以升交点为起始点,δ为轨道平面与赤道平面的夹角。
为了方便仿真,暂假设轨道面的升交点经度为零。
(2) 地心惯性坐标系(i 系)原点i O 位于地球球心,i Z 垂直于赤道平面,指向北极,i i X Y 、轴位于赤道面内,i X 轴指向春分点方向,i Y 轴通过右手定则确定指向。
(3) 地球坐标系(e 系)原点e O 位于地球球心,e Z 垂直于赤道平面,指向北极,e e X Y 、轴位于赤道面内,e X 轴指向格林威治零时,e Y 轴通过右手定则确定指向。
(4) 地理坐标系(t 系)原点t O 位于机体所在位置,t Z 垂直于当地水平面指天,t t X Y 、轴位于当地水平面内,t X 轴指东,t Y 轴指北。
(5) 机体坐标系(b 系)原点b O 位于机体质心,b X 轴沿机体横轴指向右,b Y 轴沿机体纵轴指向前,bZ轴沿机体法向轴指向上,通过右手定则确定指向。
当机体系相对轨道系的姿态角均为零时,机体系和轨道系重合。
3. 各个坐标系之间的转换关系 (1)轨道坐标系与地心惯性系i o C设飞行器在轨运行时相对升交点的转角为k ,轨道倾角为δ,则有:sin 0cos ()(90)(90)cos cos sin sin cos cos sin cos sin sin i o x z x kkC R R k R k k k k δδδδδδδ-⎡⎤⎢⎥=----=-⎢⎥⎢⎥⎣⎦ (2)地心惯性系与地球坐标系e i C设飞行器在轨运行时间为t ,则有:cos()sin()0()sin()cos()0001ie ie e i z ie ie ie t t C R t t t ωωωωω⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦(3)地球坐标系与地理坐标系t e C设飞行器的星下点的经纬度为ϕλ、,则有:sin cos 0(90)(90)sin cos sin sin cos cos cos cos sin sin t e x z C R R λλϕλϕλϕλϕϕλϕλϕ-⎡⎤⎢⎥=-+=--⎢⎥⎢⎥⎣⎦ (4)轨道坐标系与机体坐标系bo C设飞行器机体相对轨道坐标系通过俯仰角o θ、横滚角o γ、航向角o ψ来描述,则有:0000cos 0sin 100cos sin 00100cos sin sin cos 0sin 0cos 0sin cos 01oo oo b o o ooo C γγψψθθψψγγθθ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦(5)地理坐标系与机体坐标系t b C设飞行器机体相对地理坐标系通过俯仰角t θ、横滚角t γ、航向角t ψ来描述,则有:cos 0sin 100cos sin 00100cos sin sin cos 0sin 0cos 0sin cos 01tt tt b t t t t tt t t t C γγψψθθψψγγθθ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦4. 导航坐标系选为地理系时的导航仿真当选取地理系为导航坐标系时,在轨导航算法与地面基本相同: (1)姿态更新:()b b b t ttb ib t ie et C ωωωω=-+,而0b ibω=,则可得()b b t t tb t ie et C ωωω=-+,由此通过四元数算法即可更新姿态矩阵b t C ,进而可获得机体系相对地理系的姿态角。
stk 覆盖计算

stk 覆盖计算STK覆盖计算是一种用于评估卫星通信系统覆盖范围的方法。
在卫星通信系统中,覆盖范围是指卫星信号能够到达的地理区域。
STK (Systems Tool Kit)是一种广泛应用于航天和卫星通信领域的软件工具,可以用于模拟和分析卫星通信系统的性能。
STK覆盖计算的目的是确定卫星在地球上的哪些地区可以接收到信号,以及信号的强度如何。
这对于卫星通信系统的规划和优化非常重要。
通过STK覆盖计算,可以评估卫星通信系统的覆盖范围,确定信号的强弱区域,以及满足通信需求的最佳卫星轨道和参数。
STK覆盖计算主要基于卫星的轨道参数、天线特性和地球表面的地形数据。
首先,需要输入卫星的轨道参数,包括卫星的高度、倾角、偏心率等。
然后,需要定义卫星的天线特性,包括发射天线和接收天线的增益、方向图等。
最后,需要输入地球表面的地形数据,包括海拔高度、山脉、建筑物等。
通过STK软件提供的覆盖计算工具,可以生成覆盖范围图,显示卫星信号覆盖的地理区域。
覆盖范围图通常以等高线的形式表示,不同颜色的等高线表示不同强度的信号覆盖区域。
在覆盖范围图上,可以清楚地看到卫星信号的边界和强弱区域。
STK覆盖计算可以用于多种应用场景。
例如,在卫星通信系统的规划阶段,可以使用STK覆盖计算评估不同卫星轨道和参数对覆盖范围的影响,以选择最佳的卫星轨道和参数。
在卫星通信系统的运营阶段,可以使用STK覆盖计算监测卫星信号的覆盖范围和强度,以及不同地区的通信质量。
STK覆盖计算还可以用于其他领域,如导航系统、气象预报、灾害监测等。
在导航系统中,可以使用STK覆盖计算评估卫星导航信号的覆盖范围和强度,以确定导航系统的可用性和精度。
在气象预报中,可以使用STK覆盖计算评估卫星遥感数据的覆盖范围和分辨率,以确定气象预报的可靠性和准确性。
在灾害监测中,可以使用STK 覆盖计算评估卫星观测数据的覆盖范围和频率,以及不同地区的灾害风险。
STK覆盖计算是一种用于评估卫星通信系统覆盖范围的重要工具。
基于STK的卫星实时视景仿真系统设计
基于STK的卫星实时视景仿真系统设计
杜耀珂
【期刊名称】《空间控制技术与应用》
【年(卷),期】2009(035)002
【摘要】卫星在轨运行的可视化仿真,能够直观、逼真反映卫星的实时轨道和姿态运动.卫星工具软件包(STK)是进行卫星系统仿真和分析的重要工具,能够满足卫星二维和三维的可视化仿真要求.在深入研究STK/Connect模块的基础上,应用WindowsSockets和多线程编程技术,开发了STK实时视景仿真驱动程序,该程序利用UDP协议接收模拟遥测计算机给出的卫星参数,通过与STK/Connect模块的通信,实时驱动STK的仿真运行,成功实现了卫星在轨运行实时视景仿真的演示效果.【总页数】5页(P60-64)
【作者】杜耀珂
【作者单位】上海航天控制工程研究所,上海,200233
【正文语种】中文
【中图分类】V448
【相关文献】
1.基于STK的卫星视景仿真软件的设计与实现 [J], 张欣光;刘芸;唐硕;许志
2.基于SiPESC平台的卫星编队飞行视景仿真系统设计和实现 [J], 柳明;李云鹏;彭海军;索洪超;徐良寅
3.基于STK的侦察卫星预警系统设计与仿真 [J], 代明鑫;王雪松;张文明
4.基于STK的卫星通信视景仿真 [J], 周帆;潘成胜;常小凯
5.基于dSPACE的卫星控制实时仿真系统设计 [J], 杨旭;孙兆伟;朱承元;翟坤因版权原因,仅展示原文概要,查看原文内容请购买。
基于STK的GNSS系统的定位精度分析
基于STK的GNSS系统的定位精度分析刘周巍【摘要】利用STK对GNSS系统当中的GPS、GLONASS、BDS系统构建仿真星座模型,比较GPS、GLONASS、BDS系统的可见卫星数和DOP值.对三个系统进行系统间混合组合形成新的系统,组合系统有GPS/GLONASS、GPS/BDS、BDS/GLONASS和BDS/GPS/GLONASS,对组合系统进行仿真实验比较分析不同截止高度角下的可见卫星数变化和DOP值.对不同系统的区域定位性能进行了研究,研究结果表明了在GNSS系统不同组合系统的定位精度中,GPS/BDS/GLONASS 的组合精度最高,GPS/BDS的组合是双系统中定位精度最优的,而单系统中BDS是定位精度最优的.【期刊名称】《软件》【年(卷),期】2018(039)008【总页数】6页(P104-109)【关键词】GNSS;精度因子(DOP);STK;多星座;仿真实验【作者】刘周巍【作者单位】昆明理工大学国土资源工程学院,云南昆明 650093【正文语种】中文【中图分类】TP391.9全球卫星导航定位系统主要包括GPS、GLONASS、GALILLEO和BDS,在本文中主要研究了GPS、GLONASS、BDS和组合系统。
对导航星座而言,系统提供的定位几何是影响导航精度的一个重要因素。
一般导航系统的定位几何可以用精度衰减因子DOP(Dilution of precision)来描述,定义为用户等效距离误差UERE(User Equivalent Range Error)到最终定位误差或定时误差的放大系数,它反映了观测源几何位置对定位误差的影响[1]。
在卫星导航系统中,精度衰减因子DOP中的几何精度因子GDOP对接收机精度有很大影响。
为了评估定位精度,通常需要计算导航系统的GDOP值[2]。
在本文中,利用STK建立GPS、GLONASS、BDS和组合系统的空间卫星星座模型,对精度衰减因子(DOP,Dilution of precision)中的几何精度衰减因子(GDOP,Geometry Dilution of precision)进行研究分析,进而分析不同条件下的GPS、GLONASS、BDS、GPS/GLONASS、GPS/BDS、BDS/GLONASS和GPS/BDS/GLONASS的定位精度。
基于GPS测量数据的卫星在轨轨道预报算法研究

基于GPS测量数据的卫星在轨轨道预报算法研究刘燎;孙华苗;李立涛;张迎春【摘要】为提高微小卫星的在轨轨道预报能力,针对常用的低轨近圆卫星轨道,根据解析的轨道动力学模型,基于无奇点变量的拟平均要素法,用Kalman滤波技术给出了一种卫星解析星历参数在轨估计算法,用GPS测量信息对相关星历模型参数进行在轨估计.给出了算法流程.先由外部标志判断滤波器初始化状态,若需初始化,则可基于GPS测量数据,或地面上注星历参数,或上次滤波所得星历参数进行;若初始化已完成,则对星历模型参数进行Kalman滤波,得到更新的星历参数.给出了滤波算法中轨道预报、残差计算、量测计算和UD分解的计算模型.仿真结果表明:对轨道高度450 km以上的近地圆轨道,7d内的预报精度优于20 km.算法具自启动(自初始化)、收敛性佳、对测量数据的采样要求不严格等优点,实用性好.【期刊名称】《上海航天》【年(卷),期】2017(034)002【总页数】7页(P120-126)【关键词】微小卫星;自主能力;低轨近圆卫星轨道;星历模型;轨道预报;GPS测量数据;拟平均要素;Kalman滤波【作者】刘燎;孙华苗;李立涛;张迎春【作者单位】深圳航天东方红海特卫星有限公司,广东深圳518064;深圳航天东方红海特卫星有限公司,广东深圳518064;哈尔滨工业大学航天学院,黑龙江哈尔滨150001;深圳航天东方红海特卫星有限公司,广东深圳518064;哈尔滨工业大学航天学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】V448.2随着目前国内外卫星技术的不断发展尤其是卫星组网的发展,对卫星在轨自主能力的需求不断增加,在轨实时轨道确定成为判断卫星是否具有自主能力的首要条件。
随着低成本全球导航系统接收机(包括美国的GPS及中国的北斗导航系统)的应用,在微小卫星上进行实时轨道确定进而提高小卫星的自主能力,已成为目前的一种发展趋势[1-2]。
卫星星历的计算有解析法、数值法和半解析法等三类,受星载计算机计算能力的制约,我国星上轨道预报目前都采用仅考虑地球非引力场主要带谐项和大气摄动主要长期项的拟平均要素法[3-4]。
基于STK的GPS卫星可见性仿真分析
基于STK的GPS卫星可见性仿真分析
基于STK的GPS卫星可见性仿真分析
王小静;王俊文
【期刊名称】《航天电子对抗》
【年(卷),期】2014(030)005
【摘要】GPS卫星在现代信息化战争中的作用日趋重要.针对GPS 的观测应用需求,以目前在轨的31颗GPS卫星为研究对象,分析GPS卫星轨道的特征,研究GPS卫星对地面系统的可见性.结合STK和Matlab 软件进行仿真分析,为地面GPS观测系统的天线波束宽度、波束个数设计提供参考.
【总页数】4页(16-19)
【关键词】GPS卫星;可见性;卫星仿真工具包
【作者】王小静;王俊文
【作者单位】中国电子科技集团第三十八研究所,安徽合肥230088;中国电子科技集团第三十八研究所,安徽合肥230088 【正文语种】中文
【中图分类】TN97;V324
【相关文献】
1.基于STK/Matlab的GPS卫星可见性仿真分析 [J], 屈亭; 皮亦鸣; 曹宗杰
2.小卫星从母星释放过程的GPS卫星可见性分析 [J], 张晓坤; 王宇; 袁洪
3.基于STK的新一代北斗导航卫星可见性仿真分析 [J], 张柯; 白燕
4.当前GPS卫星星座的空间可见性分析 [J], 帅平; 陈定昌; 江涌
5.GPS历书解算与卫星可见性预测[C], Wang peng; 王鹏; Qi Jianzhong; 齐建中; Song Qing Ping; 宋青平。
临近空间高超声速目标飞行动态特性STK仿真
“高超声速”(Hypersonic)一词由我国著名科学家钱学森于1964年首次提出,实际上高超声速飞行器技术的发展起步于20世纪50年代的超声速燃烧及超声速燃烧冲压发动机(简称超燃冲压发动机)的研究,至今已经历了近70年的历史。
2013年5月美国X−51A第四次飞行试验,实现了以碳氢燃料超燃冲压发动机为动力的临近空间飞行器飞行速度和飞行距离的历史性突破,以吸气式高超声速飞行器为代表的临近空间和空天飞行器技术再次成为航空航天领域的热点,其技术难度极高,机遇和挑战并存。
高超声速飞行器技术的发展最终是要实现高超声速飞行器的飞行和应用。
高超声速飞行器是指最大飞行速度大于等于5倍声速、在大气层内或跨大气层长时间机动飞行的飞行器,其主要应用形式包括高超声速巡航导弹、高超声速滑翔飞行器、高超声速飞行平台(包括有人/无人高超声速飞机等)以及空天飞行器等具有战略威慑作用的武器装备和具有广泛用途的航天空间飞行器。
按照飞行器主级有/无动力分类,可分为高超声速有动力飞行器(例如X−51A,巡航级为主级,动力装置采用超燃冲压发动机)和高超声速无动力飞行器(例如HTV−2,滑翔体为主级,无动力滑翔飞行)等。
本文以HTV-2高超声速无动力滑翔导弹为研究对象,重点研究导弹在滑翔段和再入段的飞行过程,并利用卫星工具软件STK(Satellite Tool Kit,STK)的三维可视化仿真技术,将纯数字形式的弹道转换为立体的可视化弹道,以动画的形式呈现出来,本文的研究方向是将高超声速导弹弹道进行三维可视化。
1.2 国内外研究现状1.2.1 高超声速飞行器发展状况美国航空宇航局(NASA) 已经研究高超声速飞行器将近70 年. 2004年 3 月, NASA 成功试飞了X-43 验证机, 标志着高超声速飞行器研究领域取得阶段性成果。
一般认为, 大于 5 倍声速的速度称为高超声速。
美国自20 世纪50 年代开始研究吸气式高超声速技术。
Satellite Tool Kit(STK)培训教材

• 可以处理圆轨道、椭圆轨道、抛物线轨道、 双曲线轨道
• 距离从地球表面直到月球
• 计算考虑了大多数可预测的地球运动
• 春分/秋分点进动、地球章动、周日的旋转、质心位移
• 计算主要天文时间系统间差异
• 计算UTC、TAI和TDT差异
32
STK专业版
LOP长期轨道预报
• 精确预报数月或数年之后的卫星轨道 • 应用领域:
• 详细的报告和图表
21
STK用户界面
生成报告
• 预定义报告
• 星历数据、姿态数据、太阳角 度、可见性报告、AER报告、约
束数据
• 可调整时间周期 • 自定义报告内容
22
STK用户界面
生成图表
• 预定义图表
• 比较与分析不同数据元素 • 自定义图表 • 可选沿时间XY, XY, Interval 区间图, Polar极线图, Polar 90图表样式 • 通过简单易懂得格式显示复杂数据
定义区域目标
• Boundary 边界 • 手工输入边界线点或在地 图窗口点取
• Centroid 质心
• 自动计算质心 • 测地、球形、笛卡儿、圆 柱、地心 • 图形 • 属性 • 约束 • 基本、时间
18
STK用户界面
遥感器指向
• 指向类型
• Targeted 指向目标
• Target Times-指向时间 • Boresight Type 瞄准类 型-跟踪或固定 • Orientation Method 定位法Az-El, Quaternion, Euler Angles, YPR
Satellite Tool Kit
®
Satellite Tool Kit
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《航天器操作与控制试验》综合作业卫星轨道预报姓名:王备学号:院系:宇航学院二〇一〇年十一月一、实验题目:卫星轨道预报二、实验目的1.学会STK(Satellite Tool Kit)软件的使用,掌握STK的基本操作;2.学会使用STK仿真,并实现卫星的轨道预报,重点掌握HPOP高精度轨道预报和LOP长期轨道预报。
三、实验内容(一)、HPOP高精度轨道预报1. 建立两颗卫星HPOP1与HPOP2;2. 设置HPOP1考虑大气阻力,而HPOP2不考虑,其他参数相同;3. 用HPOP高精度轨道预报器生成轨道;4. 动画显示,观察两颗卫星轨道的不同;5. 生成多种类型的卫星轨道数据;6. 计算卫星轨道寿命。
(二)、LOP长期轨道预报1. 建立两颗卫星LOP1与LOP2;2. 设置LOP1考虑大气阻力,而LOP2不考虑,其他参数相同;3. 用HPOP高精度轨道预报器生成轨道;4. 生成多种类型的卫星轨道数据,观察两颗卫星轨道的不同。
四、实验过程描述(一)、HPOP高精度轨道预报1.建立新的场景将其命名为BUAA_HPOP。
2.在浏览窗口选中场景,打开Basic Properties 窗口3.在Time Period栏,输入如下设置:区域值Start Time 1 Jan 2010 00:00:00.00Stop Time 1 Jan 2010 04:00:00.00Epoch 1 Jan 2010 00:00:00.004.选择Animation栏输入如下内容:区域值Start Time 1 Jan 2010 00:00:00.00Stop Time 1 Jan 2010 04:00:00.00Time Step 60 secondsRefresh Delta Change to High Speed5.在Units栏输入如下设置:6.完成后,点击确定,从File菜单中选择Save As…,保存场景为BUAA_HPOP.sc。
7.在浏览窗口点击Satellite按钮新建一颗卫星,取消轨道向导,命名卫星为HPOP1。
,打开HPOP1卫星的Basic Properties 窗口,在Orbit栏,选择HPOP Propagator。
8.点击Semimajor Axis右侧的下拉菜单,改变为Period。
设置为95 min。
9.点击Force Models…按钮,确认HPOP Force Model 窗口中所有参数均被选用。
Drag Use - ONCd - 3.0Atm Density Model - Harris-PriesterAverage F10.7 - 65.0Area/Mass Ratio - 200.0m2/kgSolar Radiation Pressure Use - ONCp - 2.0Area/Mass Ratio - 200.0m2/kg中的确定按钮,生成卫星轨道。
11.下面打开HPOP1卫星的Graphics Properties 窗口,改变卫星的MarkerStyle为Star,点击确定。
12.新建HPOP2卫星,在Force Models 窗口,关闭Drag参数,其它设置与HPOP1相同。
生成卫星轨道后,打开它的Graphics Properties 窗口,改变Marker Style为Circle,点击确定。
13.保存场景。
动画显示场景观察卫星在整个时间周期内的相互位置。
在动画接近时间周期结束时,暂停动画,放大窗口到卫星所在区域进行观察(如图1、图2所示)图 1 接近周期结束时的2维图像图 2 接近周期结束时的3维图像14.分别选中两颗卫星,从Tools菜单中选择Report,生成两颗卫星各自的Classical Orbit Elements报告。
注意考虑阻力和未考虑阻力卫星在报告时间末期轨道参数的不同。
15.生成每颗卫星的LLA Position(经纬度高度位置)报告。
比较两颗卫星之间位置数据的差异。
16.同时选中两颗卫星,从Tools菜单中选择Graph。
在STK Graph Tool 窗口,点击New按钮,选中新建的图表格式,在文本框输入Altitude,点击Change 按钮新图表的改变名称。
17.选中Altitude格式,点击Properties按钮,在Content栏,选择Time XY作为Graph Type。
打开LLA State树,点击Fixed子树,双击Alt将其加入Y-Axis区域,点击确定。
点击STK Graph Tool 窗口的Create按钮生成图表。
18.在图表窗口中,从Edit菜单选择Attributes,改变其中一颗卫星线条的颜色。
观察整个时间周期内两颗卫星高度的差异。
关闭图表和STK Graph Tool 窗口。
19.同时选中两颗卫星,点击鼠标右键,在快捷菜单中选择Strip Chart。
20.在STK Strip Chart Tool 窗口,从Styles列表中选择Altitude(前面新建的图表格式),点击Open。
当动态图表窗口出现,改变其中一颗卫星线条的颜色。
21.动画显示场景,观察HPOP1卫星的Altitude(高度)如何降到HPOP2卫星下面。
这是由于大气阻力对HPOP1卫星的影响造成的。
22.在浏览窗口,选中HPOP卫星,然后从Tools菜单Lifetime。
23.在Lifetime 窗口,输入下列数值:显示轨道衰退日期和轨道圈数。
25.点击确定关闭Lifetime 窗口。
(二)、LOP长期轨道预报1.建立新的场景将其命名为BUAA_LOP。
2.在浏览窗口选中场景,打开Basic Properties 窗口3.在Time Period栏,输入如下设置:区域值Start Time 1 Jan 2010 00:00:00.00Stop Time 1 Jan 2011 00:00:00.00Epoch 1 Jan 2010 00:00:00.004.选择Animation栏输入如下内容:5.在Units栏输入如下设置:6.在浏览窗口,点击Satellite按钮新建一颗卫星,取消轨道向导,命名它为LOP1。
7.打开LOP1卫星的Basic Properties 窗口,在Orbit栏输入下列设置。
保留Start和Stop Time和Step Size默认值。
LOP预报器自动选择1天作为时间步长。
输入完毕后,点击确定。
8.点击Force Models(阻力模型)按钮。
9.在LOP Force Models 窗口,输入如下数值:10.新建另一颗卫星,将其命名为LOP2,打开LOP2卫星的Basic Properties窗口,在Orbit栏输入下列设置。
保留Start和Stop Time和Step Size默认值。
LOP预报器自动选择1天作为时间步长。
输入完毕后,点击确定。
区域值Drag大气阻力Use –Off Solar Radiation Pressure太阳光压Use –ON Cp – 1.5Atmosphere – 90 km Physical Data12.在浏览窗口选中LOP1卫星,从Tools菜单选择Graph。
13.在Graph Tool窗口,选中LLA Position,点击Time Period…按钮。
将StopTime改为10 Jan 2010 00:00:00。
点击Change按钮更改,再点击确定按钮关闭窗口。
生成图表。
14.对LOP2卫星重复上述步骤,注意随时间增加出现的分歧。
15.尝试定义不同的时间周期和图表格式。
完成后,关闭图表和Graph Tool窗口。
16.回到LOP1和LOP2卫星的Basic Properties 窗口,在Force Model区域试验不同的大气阻力、太阳光压、物理参数,检验关闭太阳光压和三体引力后的变化。
17.完成后,关闭并保存场景。
五、实验结果(一)、HPOP高精度轨道预报图 3 生成HPOP1与HPOP2的轨道参数报告图 4 生成HPOP1的LLA位置报告图5生成HPOP2的LLA位置报告图 6 生成HPOP1与HPOP2的高度变化图表图7 生成HPOP1与HPOP2的动态高度变化图表图8 生成HPOP1动态轨道参数报告图9 生成HPOP1的动态LLA位置报告图10 计算轨道衰退日期和衰退圈数图11 HPOP1卫星轨道衰退的最终轨道(二)、LOP长期轨道预报图12 生成LOP1的LLA位置图表图13 生成LOP2的LLA位置图表图14 生成LOP1的轨道参数报告图15 生成LOP1的LLA位置报告六、结果分析从二维和三维图像上可以观察到预报器生成的卫星轨道,仔细观察发现受阻力影响的HPOP1卫星会位于没有阻力的HPOP2卫星前面;用工具箱生成的HPOP1与HPOP2的轨道参数报告如图3所示,报告中包含各个时刻的七项基本轨道参数:半长轴(Semi-major Axis)、偏心率(Eccentricity)、轨道倾角(Inclination)升交点赤经(RAAN)、近地点幅角(Arg of Perigee)、真近点角(True Anomaly)、平近点角(Mean Anomaly)。
生成HPOP1与HPOP2的经度/纬度/高度(LLA)位置报告分别如图4和图5所示,报告中包含各个时刻的经度、纬度、高度和速度。
生成的HPOP1与HPOP2的高度变化图表如图6所示;动态高度变化图表如图7所示,从动态图中可以直观的观察到HPOP1卫星的Altitude(高度)是如何降到HPOP2卫星下面的,这是由于大气阻力对HPOP1卫星的影响造成的。
受阻力影响的卫星,能量不断减少,轨道高度的降低将使轨道周期缩短,表现在地面轨迹上卫星的移动速度就会加快,位置也会比具有相同轨道参数但没有考虑阻力影响的卫星靠前。
留意到HPOP1卫星的高度不是稳定的下降,还会周期性地上升,HPOP2卫星的高度也是如此。
这是由于地球扁率的影响,会对圆轨道卫星产生这种结果。
还可生成卫星的动态报告,如图8和图9所示。
另外,还可计算卫星轨道衰退日期和衰退圈数(如图10所示),计算后,在二维图像上会出现变粗的地面轨迹(如图11所示),它表示了HPOP1卫星轨道衰退的最终轨道。
同样,用LOP轨道预报生成的多种轨道数据如图12、图13、图14、图15所示,改变Time Period和Step Size可以改变输出报告的时间周期和步长。
类似地,改变其他因素,可以观察到HPOP预报法和LOP预报法提供的其它的也影响了卫星轨道的摆动。
七、课程体会STK这款软件是靠自学的,软件为英文版,入手比较难,而图书馆有关STK 的参考书仅有一本:《STK在计算机仿真中的应用》,书比较老,介绍的也不详细,所以只能靠自己不断摸索来逐步熟悉STK。