基于Matlab神经网络控制仿真研究
基于MATLAB的BP神经网络实现研究

Mirc mp tr pi t n o. 2 N . ,0 6 co o ue l ai sV i2 , o 8 2 0 Ap c o
的 工 具 箱 。 在 神 经 网 络 工 具 箱 中 , 提供 了许 多 有 关 神 经 网 如 它 络 设 计 、 练 和仿 真 的 函数 。 户 只要 根据 自己 的需 要 调 用 相 训 用
图 1 三层 B P网 络 结 构 图
隐 层 输 入 层
输 出层
B 网 络 由正 向 传 播 和 反 向 传 播 组 成 , 正 向 传 播 阶 段 , P 在
和 仿 真 的 函数 和 方 便 、 友好 的 图形 用 户 界 面来 实现 B 网络 , 可 实 时 将 仿 真 结 果 可视 化 , 而 使 应 用B 网络 来 解 决许 多领 域 的 P 还 从 P
实际问题 变得非常方便和有效 。
关 ■ 词 :P 神 经 网 络 I B MATL ABI 真 仿 中 圈 分 类 号 : P13 T 8 文献标识码 : A
每一层神 经元 的状 态只影 响下一层神 经元 的状态 , 若在 输 出 层得不到期望的输 出值 , 则进行 误差的反 向传播 阶段 。 其具体
的学习过程和步骤如 下:
关 的程 序 , 而 免除 了编 写复杂 而庞 大 的算 法程 序 的困扰 。 从
20 0 4年 , MATL AB 的最 新 版本 产 品 MATL 7发 布 。 AB MAT — L 7在 编 程 和 代 码 效 率 、 图 和 可 视 化 、 学 运 算 、 据 读 AB 绘 数 数 写 等 方 面 都 有 了很 大 的 改 进 。
引言
人 工 神 经 网络 ( ric l ua Newok A A t ia Nerl t r , NN) f i 的理 论
利用Matlab进行控制系统仿真和性能评估

利用Matlab进行控制系统仿真和性能评估控制系统是现代工程中不可或缺的一部分,它在各个行业中扮演着至关重要的角色。
控制系统的设计和优化需要经过一系列的仿真和性能评估,以确保系统能够稳定运行,并满足设计要求。
Matlab作为一种强大的技术计算工具,在控制系统仿真和性能评估方面发挥着重要作用。
首先,我们需要了解控制系统的基本概念和设计原理。
控制系统是一个由控制器、被控对象和反馈回路组成的系统。
其中,控制器根据需要对被控对象进行控制,而反馈回路可以获取系统的状态信息并进行修正,以保持系统的稳定性。
控制系统的设计需要考虑到系统的动态特性、稳定性、鲁棒性等多个方面。
在Matlab中,我们可以使用Simulink工具箱来进行控制系统的仿真和性能评估。
Simulink是一个图形化的建模和仿真环境,它允许用户通过拖拽和连接不同的组件来构建系统模型。
通过在Simulink中建立控制系统的模型,我们可以更直观地理解系统的结构和工作原理。
在进行仿真之前,我们需要确定系统的数学模型。
数学模型是描述系统动态特性的数学方程,它可以是线性的或非线性的。
对于线性系统,我们可以使用传递函数或状态空间模型来描述;对于非线性系统,我们可以使用差分方程或微分方程来描述。
在Matlab中,我们可以使用tf、ss、zpk等函数来创建和操作这些模型。
一旦建立了系统的数学模型,我们就可以开始进行仿真了。
仿真可以帮助我们预测系统的行为,分析系统的稳定性和性能,并根据需要进行参数优化。
在Simulink中,我们可以使用不同的仿真方法和工具来模拟系统的动态响应。
例如,我们可以使用蒙特卡洛方法来生成随机的输入信号,以测试系统对不同输入的响应;我们还可以使用频域分析工具来研究系统的频率响应特性。
在仿真的过程中,我们还可以对系统进行性能评估。
性能评估可以帮助我们了解系统的控制效果,评估系统是否满足设计要求,并提供改进系统性能的指导。
在Matlab中,我们可以使用各种指标来评估系统的性能,如稳定度、响应速度、超调量等。
基于MATLAB的RBF神经网络建模及应用

第27卷 第2期大庆师范学院学报Vol.27 No.2 2007年4月JOURNAL OF DAQ I N G NOR MAL UN I V ERSI TY Ap ril,2007基于MAT LAB的RBF神经网络建模及应用王艳芹,张 维(大庆师范学院物理与电气信息工程系,黑龙江大庆163712)摘 要:MAT LAB中的神经网络工具箱是进行神经网络系统分析与设计的有力工具。
RBF神经网络以其计算量小,学习速度快,不易陷入局部极小等诸多优点为系统辨识与建模提供了一种有效的手段。
将二者结合起来,解决了油田试井系统中压力值的建模问题,取得了令人满意的结果。
关键词:RBF神经网络;MAT LAB;试井系统作者简介:王艳芹(1979-),女,黑龙江海伦人,大庆师范学院物理与电气信息工程系教师,从事神经网络辨识与建模研究。
中图分类号:TP273 文献标识码:A 文章编号:1006-2165(2007)02-0118-03 收稿日期:2007-01-220引言人工神经网络作为一门新兴学科在非线性系统的建模与辨识中得到了广泛的应用[1]。
目前应用最广泛、直观、易理解的是基于误差反向传播算法的多层前向神经网络,简称BP(Err or Back Pr opagati on)网络,但该网络存在着收敛速度慢、易陷入局部极小及隐含层结点个数不易确定等缺陷。
近些年备受关注的另一种前向神经网络———径向基函数(Radial Basis Functi on,简记RBF)神经网络有效地解决了上述问题。
在人工神经网络的功能实现上,与传统的利用Basic、Fortran、C等语言编程相比,直接应用第四代计算机语言MAT LAB的神经网络工具箱更加简便易行。
MAT LAB是由美国M ath works公司发布的面向科学计算、数据可视化以及交互式程序设计的高级语言,其诸如小波分析、鲁棒控制、模糊逻辑、神经网络等丰富的工具箱代表了当今一流专家学者在这些领域的前沿工作[2]。
基于LabVIEW与MATLAB平台的神经网络设计与应用研究
了 (i mo d S g i
函数 ) W ; 为神 经元 与 输 出层 神经 元 / 间 的连接权 之
值 ; 为该 神经元 的阈值 ; O 为前一 层 的第 个神 经元
的输出。
输 入 层
隐 舍 层
输 出 层
导入节点中l 选择该节点的操作F nt n >A ay e > 4 】 。 u ci > n lz> o
称 NN) 由大量 简单的处理单元 ( 是 称为 神经元) 广泛的互 相连接形 成的复杂 网络 , 是基于 数值 计算 的知识处理 它
数 目; D为输 出层神 经元 数 目; 为 1 0之 间的整数 。 n _ , —1
BP神 经网络是 通过在样 本 的学 习训 练过程 中采 用 误差反 向传播算 法( BP算法 ) 调整 权值达 到满足精 度
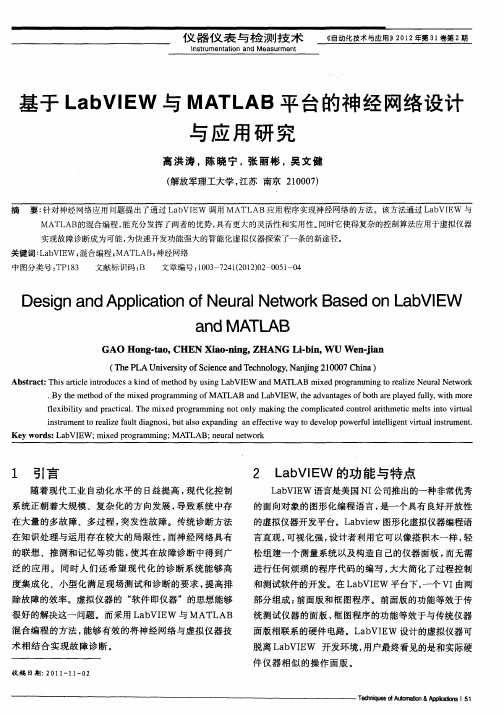
与 MAT AB之 间的数据传递可用 图 l L 表示l。 4 ]
隐含 层节 点根 据需要 自由设计 的情 况下 , 三层 BP 网络 可 以实 现任 意精 度逼 近任 意 连续 函数 。 因此 如何 合 适
图 1 L b IW 与 MA L B数据 传递 示意 图 a VE TA
选 取 隐含层 神 经元个 数对 整 个 网络能否 正 常工 作 有重
松 组建一个 测量 系统 以及 构造 自己的仪器面板 , 而无需 进行 任何烦琐 的程序 代码 的编写 , 大大 简化 了过程 控制
和测试软件 的开发 。在 L b E 平 台下 , 个 v 由两 a vI W 一 I
部分 组成 : 前面版 和框 图程 序 。前面版 的功 能等效于 传
统测试 仪器 的面版 , 图程 序 的功 能等效于 与传统仪器 框
点 的使 用 ,既 可 以开 打 该 节 点 直 接在 其 框 图 内书 写 MA L T AB程序代码 : 也可以将 已经写好 的MA L T AB程序
BP神经网络在智能雨刮器上的应用及MATLAB仿真研究

0 ’ 言 引
考 虑 到 大 雨 、大 雾 以及 其 他 天 气 的 影 响 , 汽 车 通 常 都 装 置 了 雨 刮 器 来 消 除 这 些 天 气 的影 响 。 为 了确 保 交 通 行 驶 和清 晰 的 玻 璃 窗 , 车 风 挡 的 汽 良好 视线 是 驾驶 员确 保 行 车 安全 的 必要 条 件 。据 统 计 报 道 ,全 世 界 雨 天 行 车有 7 %的事 故 是 由于 驾驶 员 手 动 操 作 雨 刷 器 而 引起 的 。传 统 的雨 刮 器 均 由驾 驶 者 来 控 制 .容 易 分 散 驾 驶 者 的 注 意
魏俞 涌 许 航 飞 , 一龙 2 , 张
(. 兴 职 业 技 术 学 院 机 电 与 汽 车分 院 , 1嘉 嘉兴 3 4 3 ; . 国计 量学 院 机 电学 院 , 州 3 0 1 ) 10 6 2 中 杭 10 8
摘
要: 在分析 了传统雨 刮器缺点的基础上 , 出了一种基于 B 提 P神 经网络 的模式 识别模型 , 专家 的 用
V0 _ No5 l28 . M a 201 v 2
科 技 通 报
B L I CE UL ET N 0F S I NCE AND T CHN0L GY E 0
第2 8卷 第 5 期
2 2年 5月 0l
B P神 经 网络在 智能雨刮器上 的应 用及 MA L B仿 真研 究 TA
经验数据训练它 , 并测试 了它 ; 出了 B 给 P神经 网络 的学 习过程及算法 。结 果表明这个基 于 B P神经 网 络的模型不使用精 确的数 学模 型即可有效处理智能雨 刮器系统的不 可靠性 和非线性 。
关 键 词 : 刮 器 ;P神 经 网络 ; P算 法 ; T A 雨 B B MA L B仿 真 中图 分 类 号 :P 7 T 22 文 献标 识 码 : A 文 章 编 号 :0 17 1 (0 2 0 — 16 0 10 — 19 2 1 )5 0 5 — 3
基于Matlab和VC++的神经网络仿真实验设计

Ab ta t Sm u ain e p rm e t s o e o h fe tv e n o u a t r ta h n . I ep sr c : i lt x e i n i n f t e ef cie m a s f r Ne r lNe wo k e c ig o t h ls su e t b o b w h t t e a e la n d Bu h i u ain e p r e t t a lb o l a e s m e t d n sa s r a h y h v e r e . t t e sm lt x e i n s wi M ta n y h v o o m h s o to ig ih ma et esm ua ine p rme t o t iin si.Thsp p rp e e t e inm e h h rc m n swh c k h i lt x e i n sn ti uto itc o n i a e r s n sad sg t —
YAO i M n ,ZHAO i M n ,XI NG Li
(. olg fAuo ainEn ier g,Na jn 1 C l eo e tm t o gnei n n igUnv ri fAeo a t s n ies yo t rn ui dAsrn uis ca toa t ,Na jn c n ig,2 0 1 ,hn ; 1 0 6C ia
维普资讯
第2卷 第3 9 期
20 0 7年 6月
BP神经网络实验详解(MATLAB实现)
BP神经网络实验详解(MATLAB实现)BP(Back Propagation)神经网络是一种常用的人工神经网络结构,用于解决分类和回归问题。
在本文中,将详细介绍如何使用MATLAB实现BP神经网络的实验。
首先,需要准备一个数据集来训练和测试BP神经网络。
数据集可以是一个CSV文件,每一行代表一个样本,每一列代表一个特征。
一般来说,数据集应该被分成训练集和测试集,用于训练和测试模型的性能。
在MATLAB中,可以使用`csvread`函数来读取CSV文件,并将数据集划分为输入和输出。
假设数据集的前几列是输入特征,最后一列是输出。
可以使用以下代码来实现:```matlabdata = csvread('dataset.csv');input = data(:, 1:end-1);output = data(:, end);```然后,需要创建一个BP神经网络模型。
可以使用MATLAB的`patternnet`函数来创建一个全连接的神经网络模型。
该函数的输入参数为每个隐藏层的神经元数量。
下面的代码创建了一个具有10个隐藏神经元的单隐藏层BP神经网络:```matlabhidden_neurons = 10;net = patternnet(hidden_neurons);```接下来,需要对BP神经网络进行训练。
可以使用`train`函数来训练模型。
该函数的输入参数包括训练集的输入和输出,以及其他可选参数,如最大训练次数和停止条件。
下面的代码展示了如何使用`train`函数来训练模型:```matlabnet = train(net, input_train, output_train);```训练完成后,可以使用训练好的BP神经网络进行预测。
可以使用`net`模型的`sim`函数来进行预测。
下面的代码展示了如何使用`sim`函数预测测试集的输出:```matlaboutput_pred = sim(net, input_test);```最后,可以使用各种性能指标来评估预测的准确性。
基于MATLAB自动控制系统时域频域分析与仿真
基于MATLAB自动控制系统时域频域分析与仿真MATLAB是一款强大的数学软件,也是自动控制系统设计的常用工具。
它不仅可以进行时域分析和频域分析,还可以进行相关仿真实验。
本文将详细介绍MATLAB如何进行自动控制系统的时域和频域分析,以及如何进行仿真实验。
一、时域分析时域分析是指对系统的输入信号和输出信号进行时域上的观察和分析,以了解系统的动态特性和稳定性。
MATLAB提供了一系列的时域分析工具,如时域响应分析、稳态分析和步骤响应分析等。
1.时域响应分析通过时域响应分析,可以观察系统对于不同的输入信号的响应情况。
在MATLAB中,可以使用`lsim`函数进行系统的时域仿真。
具体步骤如下:- 利用`tf`函数或`ss`函数创建系统模型。
-定义输入信号。
- 使用`lsim`函数进行时域仿真,并绘制系统输出信号。
例如,假设我们有一个二阶传递函数模型,并且输入信号为一个单位阶跃函数,可以通过以下代码进行时域仿真:```num = [1];den = [1, 1, 1];sys = tf(num, den);t=0:0.1:10;u = ones(size(t));[y, t, x] = lsim(sys, u, t);plot(t, y)```上述代码中,`num`和`den`分别表示系统的分子和分母多项式系数,`sys`表示系统模型,`t`表示时间序列,`u`表示输入信号,`y`表示输出信号。
通过绘制输出信号与时间的关系,可以观察到系统的响应情况。
2.稳态分析稳态分析用于研究系统在稳态下的性能指标,如稳态误差和稳态标准差。
在MATLAB中,可以使用`step`函数进行稳态分析。
具体步骤如下:- 利用`tf`函数或`ss`函数创建系统模型。
- 使用`step`函数进行稳态分析,并绘制系统的阶跃响应曲线。
例如,假设我们有一个一阶传递函数模型,可以通过以下代码进行稳态分析:```num = [1];den = [1, 1];sys = tf(num, den);step(sys)```通过绘制系统的阶跃响应曲线,我们可以观察到系统的稳态特性。
现代控制系统分析与设计——基于matlab的仿真与实现
现代控制系统分析与设计——基于matlab的仿真与实现近年来,随着工业技术的飞速发展,控制系统逐渐成为工业自动化过程中不可缺少的重要组成部分,因此其分析与设计也会受到人们越来越多的关注。
本文从控制系统的分类出发,介绍了基于Matlab 的分析与仿真方法,并结合详细的实例,展示了最新的Matlab软件如何用来设计现代控制系统,及如何实现仿真结果。
一、控制系统分类控制系统是将完整的物理系统划分为几个部分,通过规定条件把这些部分组合起来,共同完成某一特定任务的一种技术。
控制系统可分为离散控制系统和连续控制系统,离散控制系统的尺度以脉冲的形式表现,而连续控制系统的尺度以连续变量的形式表现,常见的连续控制系统有PID、环路反馈控制等。
二、基于Matlab的分析与仿真Matlab是一款实用的高级计算和数学工具,具有智能语言功能和图形用户界面,可以进行复杂数据分析和可视化。
Matlab可以用来开发控制系统分析与仿真,包括:数学建模,系统建模,状态估计与观测,数据处理,控制算法研究,仿真实验及系统原型开发等。
此外,Matlab还可以利用其它技术,比如LabVIEW或者C程序,将仿真结果实现在实物系统上。
三、实现现代控制系统分析与设计基于Matlab的现代控制系统分析与设计,需要从以下几个方面进行考虑。
1.数学建模:Matlab支持多种数学计算,比如代数运算、矩阵运算、曲线拟合等,可以用来建立控制系统的数学模型。
2.系统建模:Matlab可以用于控制系统的建模和仿真,包括并行系统建模、混沌建模、非线性系统建模、时滞建模、系统设计建模等。
3.状态估计与观测:Matlab可以用来计算系统状态变量,并且可以根据测量信号估计系统状态,用于系统诊断和控制。
4.数据处理:Matlab可以用来处理控制系统中的大量数据,可以更好地研究控制系统的特性,以便进行更好的设计和控制。
5.算法研究:Matlab可以用来研究新的控制算法,以改进控制系统的性能。
神经网络自适应控制算法的研究和MATLAB仿真
S tfc r sl ae enahee sn T A i lt no ieet ln . i lt na da a s aiat yr uthv e ci db uigMA L Bs ai nd rn a t Smuai n n l i s o e s b v y mu o f p s o ys
pa t cmbn d w t rlt e c nrlag r h ,a d a slc o to o. e rig f c r i o tie . lns o ie i eai o t loi m n eet n me d f , 1 n n a t s s band h v o t i h a o
s o a eag rtm a u r n e a es se h sg o y a cq a i . h wst t h lo i h t h c ng a a tet th tm a o dd n mi u ly h t y t
Ke r s B e o k a a t ecnrl lo i m v r be e r i c r mo eig sm lt n ywo d : Pn t r; d p i o t g r h ; a i l la n f t ; d l ; i uai w v oa t a n ga o n o
b c u e t e e i a wa se r r T i p p ri r v sa l a ig a g rt m a e n B e w r st p r x ma e t e e a s r l y ro . h s a e h s mp o e r n l o i en h b sd o P n t o k a p o i t h o
维普资讯
船 电技术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
http://www.paper.edu.cn
1
基于Matlab神经网络控制仿真研究
袁 健,张文霞
(青岛科技大学 自动化与电子工程学院,山东 青岛 266042)
摘 要:介绍了基于神经网络的直接逆控制和模型参考自适应控制的基本原理,然后把它应
用在一个简单的二阶系统控制中,并对其进行了仿真,该仿真是使用MATLAB神经网络工具
箱完成的。最后对比了不同的控制方法以及不同的训练样本容量对控制结果的影响。
关键词:神经网络 直接逆控制 模型参考自适应控制
1.简介
近年来,随着社会经济的发展,对控制系统的设计要求日益提高,传统的控
制理论及传统的智能控制方法已经很难满足需要。神经网络控制一起独特的优点
受到控制界的关注,在控制系统中得到日益广泛的应用,这主要来自以下三方面
的动力:处理越来越复杂系统的需要;实现越来越高的设计目标的需要;在越来
越不确定情况下进行控制的需要。用神经网络设计的控制系统,具有高度的自适
应性和鲁棒性,对于非线性和不确定性系统也取得了满意的控制效果,这些效果
是传统的控制方法难以达到的[1]。
本文对一简单的二阶系统分别采用了直接逆控制和模型参考自适应控制,通
过仿真来分析其控制效果。并研究了不同样本容量对仿真结果的影响。
2. 直接逆控制原理
这种方法是将神经网络直接作为控制器串联于实际系统之前,其系统结构如
图1所示。它的主要思想是利用神经网络的逼近能力对系统的逆动态进行建模,
以使得整个系统的输入输出为恒等映射,从而实现高性能的控制。该方法结构简
单,可充分利用神经网络的建模能力,但系统的初始响应取决于网络的初始权值,
控制开始投入时系统鲁棒性欠佳[2]。系统控制特性取决于模型的精确程度,当模
型存在误差或对象有扰动时,容易造成系统不稳定。直接逆动态控制的原理可描
图1 神经网络直接逆控制
Fig.1 Neural network direct inverse control
http://www.paper.edu.cn
2
述为: ))(,),(),1(,),(()1(mtutuntytygty−+−=+ΛΛ ;
神经网络的训练过程可描述为:
))(,),(),1(,),(),1((ˆ)(ˆ1mtutuntytytygtu−+−+=−ΛΛ。
3
.模型参考自适应控制原理
如图2所示。当非线性系统为仿射系统时,控制器特性由辨识模型直接获得。
当非线性系统为非仿射系统时,控制器也采用神经网络实现。这时神经网络控制
器的训练方式用类似于逆动态辨识的方案,但这时的误差函数为et=||yp-yt||。式中,
yp为对象实际输出,y
t
为参考模型的输出。由于辨识模型和控制器均采用神经网
络,因此增加了系统的鲁棒性[3]。
4
.直接逆控制设计
4.1被控对象:如图3所示,本文的控制对象是一简单的二阶系统。
其传递函数是:
4.2
神经网络设计:采用单隐层神经网络,输入层4个神经元,隐层5个神经元,
)()()()()(
3
tutytytyty=++′+
′′
图3 被控对象
Fig.3 Controlled object
图2 自适应控制系统模型
Fig.2 System model of adaptive control
http://www.paper.edu.cn
3
输出层1个神经元。隐层作用函数为:xxeey−−+−=11 ,输出层为线性输出[4]。
4.3训练算法:采用MaLevenberg-rquardt算法,系统模型如图4。
5
.模型参考自适应控制的设计
模型参考自适应控制是采用Gauss-Newton算法,系统模型如图2。前向网
络的训练仍采用直接逆控制时的数据对,神经网络控制器的结构也同直接逆控制
时的一样[5]。
6.系统仿真过程
6.1产生训练数据:产生一个最大幅值为12
、频率不定的方波序列,通过被控对
象,得到输出。这样总共产生1000 组数据,其中前500组用作训练,后500组
可以用来检验控制结果[6]。如图5所示。
6.2训练和仿真结果:
图4 直接逆控制系统模型
Fig.4 System model of direct inverse control
图5 产生的输入输出数据
Fig.5 Input and output data
a
m
p
l
i
t
u
d
e
a
m
p
l
i
t
u
d
e
http://www.paper.edu.cn
4
在控制过程中,当参考信号为方波时,经过500次训练后,其控制结果如图6。
经过1000次训练后,其控制结果如图7。当采用模型参考自适应控制时,每
200
次采样,
更新一次权值,总共更新8次,以达到较好的效果。其控制结果如图8。
7.结论
通过仿真结果可以看出,神经网络直接逆控制基本上可以达到好的控制效
果,但是阶越时超调量都比较大。其中500次训练后的控制结果最差,阶越时收
敛速度最慢;1000次训练后的控制结果比经过500次训练的控制结果有所改善,
但在稳态时仍然有波动;经过模型参考自适应控制的结果最理想,阶越时的响应
图8 模型参考自适应控制结果
Fig.8 Model reference adaptive control
020406080100120140160180200
-2
0
2
Reference and output signal
time (samples)
a
m
p
l
i
t
u
d
e
图7 1000次直接逆控制结果
Fig.7 Training result of 1000 times direct inverse control
time (samples)
a
m
p
l
i
t
u
d
e
图6 500次直接逆控制结果
Fig.6 Training result of 500 times direct inverse control
time (samples)
a
m
p
l
i
t
u
d
e
http://www.paper.edu.cn
5
非常好,超调量基本为零。但是由于神经网络自适应控制是在线学习,因此当系
统模型变化或出现扰动时,系统需要修改大量的网络权值,从而会降低系统的响
应速度。
参考文献
[1] 王树青.先进控制技术及应用[M].北京:化学工业出版社,2001.
[2] 徐丽娜.神经网络控制[M].黑龙江:哈尔滨工业大学出版社,1999.
[3] 何玉彬,李新忠.神经网络控制技术及其应用[M].北京:科学出版社,2000.
[4] 焦李成.神经网络系统理论[M].西安:西安电子科技大学出版社,1999.
[5] 楼顺天,施阳.基于MATLAB的系统分析与设计——神经网络[M].西安:西安电子科技大学出版社,
1998.
[6] 闻新,周露,王丹力,等.MATLAB神经网络应用设计[M].北京:科学出版社,2001.
Neural Network Control and Simulation Based on Matlab
Yuan Jian,Zhang wenxia
(College of Information and Control Engineering, Qingdao University of Science and Technology,
Qingdao 266042, China)
Abstract
In this paper, I introduced the theory about the direct inverse control and the adaptive control used in
NN control. Then I applied them in a simple two-order system and got the simulation result. The
simulation was operated with the NN toolbox in MATLAB. At last, I compared the control result under
different conditions.
Keywords: Neural Network Direct Inverse Control Adaptive Control