无人飞机原理
无人机工作原理-空气动力学
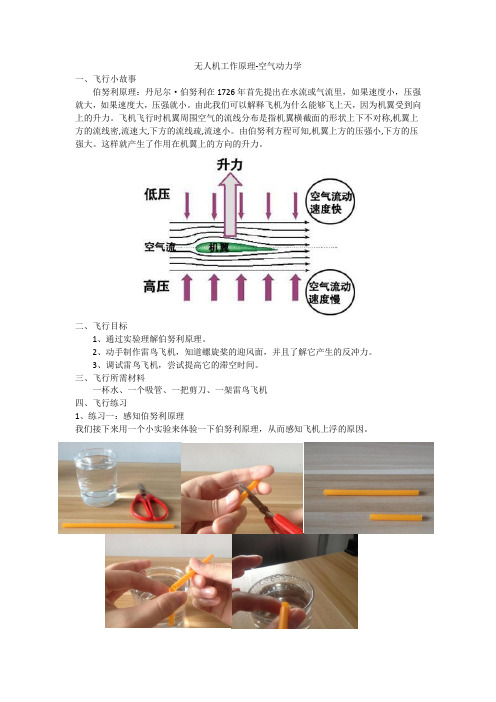
无人机工作原理-空气动力学一、飞行小故事伯努利原理:丹尼尔·伯努利在1726年首先提出在水流或气流里,如果速度小,压强就大,如果速度大,压强就小。
由此我们可以解释飞机为什么能够飞上天,因为机翼受到向上的升力。
飞机飞行时机翼周围空气的流线分布是指机翼横截面的形状上下不对称,机翼上方的流线密,流速大,下方的流线疏,流速小。
由伯努利方程可知,机翼上方的压强小,下方的压强大。
这样就产生了作用在机翼上的方向的升力。
二、飞行目标1、通过实验理解伯努利原理。
2、动手制作雷鸟飞机,知道螺旋桨的迎风面,并且了解它产生的反冲力。
3、调试雷鸟飞机,尝试提高它的滞空时间。
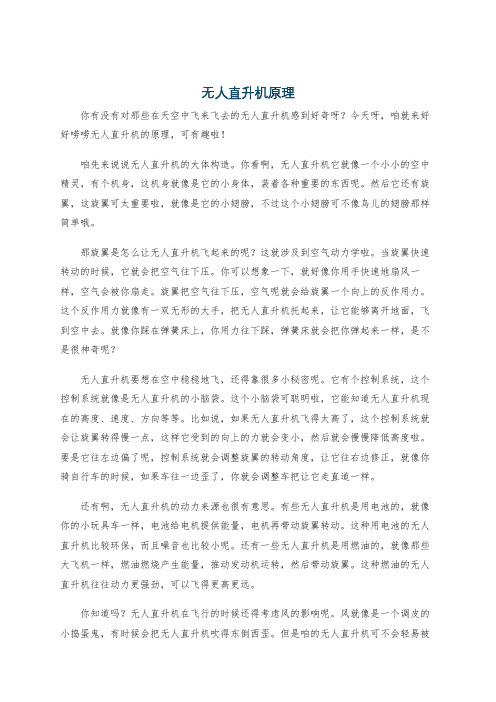
三、飞行所需材料一杯水、一个吸管、一把剪刀、一架雷鸟飞机四、飞行练习1、练习一:感知伯努利原理我们接下来用一个小实验来体验一下伯努利原理,从而感知飞机上浮的原因。
左手拿着短的放在水中,右手拿着长的吹气,吸管吹气的那个地方空气速度很快,这样大气压力变小,但是短吸管下面的大气压力没有变化,就会把水压到吹气的地方。
实验完成后注意整理材料哦。
2、练习二、雷鸟飞上天我们组装雷鸟模型飞机,体验伯努利原理,让飞机上天。
步骤一:取出机翼,按照一下方法折叠。
标注为为正折向下折,标注为反折向上折。
注意动作要轻,切勿折断机翼。
你说说飞机在飞行过程中,空气在机翼的行走的路线吗?试试用皮尺测量机翼正反面翼的长度,用速度=路程÷时间来比较一下空气在机翼正反面的流速。
我们发现:空气在机翼上方路程比下方大,时间一样,所以流速要快。
流速的快慢,形成了气压下方比上方大,就形成了向上的压力,飞机就会被往上推。
步骤二:定型主翼,先给翼型定型片贴上双面胶,再将定型片粘贴到机翼上反角背面,最后用加强胶带加固。
步骤三:安装翼台,将翼台安装到机身上,大约7CM,注意翼台前后不能搞错,安装好后将双面胶贴到翼台上;部分机架会太粗,可以用小刀刮一下。
步骤四:安装机翼,将机翼粘帖到翼台上,前后缘不要搞错,粘帖两边机翼要对称;完成后用塑料片和小橡皮圈将机翼再次加固固定;步骤五:安装尾翼,安装尾钩和尾翼翼座,粘帖垂直尾翼和水平尾翼,水平尾翼要和机身水平,垂直尾翼要和水平尾翼垂直。
无人侦察机基本知识

无人侦察机基本知识无人侦察机(Unmanned Aerial Vehicle, UAV)是一种不需要人员操控的飞行器,它可以通过预设的路径自主飞行,并且能够携带各种传感器和设备,用于侦察、监视、勘察、目标定位等任务。
无人侦察机在近几十年来得到了快速发展,已经成为现代军事和民用领域中不可或缺的重要工具。
一、无人侦察机的基本构成和原理无人侦察机主要由飞行平台、电子设备和控制系统组成。
飞行平台通常采用固定翼、旋翼或混合翼结构,以满足不同的任务需求。
电子设备包括导航系统、通信系统、传感器等,用于实现飞行控制和信息获取。
控制系统通过地面指挥站或自主控制软件,控制无人侦察机的飞行路径和任务执行。
二、无人侦察机的分类根据飞行平台和任务需求的不同,无人侦察机可以分为多种不同类型。
常见的分类方式包括:固定翼无人机、多旋翼无人机、垂直起降无人机等。
固定翼无人机具有长航时、高速飞行的特点,适合大范围侦察和目标搜索;多旋翼无人机具有垂直起降和悬停能力,适合低空侦察和近距离观察;垂直起降无人机具有垂直起降和固定翼飞行的能力,综合了两者的优点,适合复杂环境下的任务执行。
三、无人侦察机的应用领域无人侦察机在军事和民用领域有着广泛的应用。
在军事方面,无人侦察机可以用于敌情侦查、目标定位、战场监视等任务,能够提供及时、准确的情报支持。
在民用领域,无人侦察机可以用于环境监测、资源勘察、灾害应急等任务,能够减少人力成本和风险。
四、无人侦察机的优势和挑战相比传统的有人侦察飞机,无人侦察机具有以下几个明显的优势:首先,无人侦察机不需要携带人员,可以减少飞机的结构和重量,提高飞行性能和续航能力;其次,无人侦察机可以在危险环境下执行任务,保护人员的安全;再次,无人侦察机可以通过自主飞行和编程控制,实现更加灵活和精准的任务执行。
然而,无人侦察机的发展还面临一些挑战。
首先,无人侦察机的飞行控制和导航系统需要高度可靠和精确,以保证飞行安全和任务完成的准确性;其次,无人侦察机在空域管理和隐私保护等方面还存在一定的法律和伦理问题,需要进一步研究和规范。
无人直升机原理
无人直升机原理你有没有对那些在天空中飞来飞去的无人直升机感到好奇呀?今天呀,咱就来好好唠唠无人直升机的原理,可有趣啦!咱先来说说无人直升机的大体构造。
你看啊,无人直升机它就像一个小小的空中精灵,有个机身,这机身就像是它的小身体,装着各种重要的东西呢。
然后它还有旋翼,这旋翼可太重要啦,就像是它的小翅膀,不过这个小翅膀可不像鸟儿的翅膀那样简单哦。
那旋翼是怎么让无人直升机飞起来的呢?这就涉及到空气动力学啦。
当旋翼快速转动的时候,它就会把空气往下压。
你可以想象一下,就好像你用手快速地扇风一样,空气会被你扇走。
旋翼把空气往下压,空气呢就会给旋翼一个向上的反作用力。
这个反作用力就像有一双无形的大手,把无人直升机托起来,让它能够离开地面,飞到空中去。
就像你踩在弹簧床上,你用力往下踩,弹簧床就会把你弹起来一样,是不是很神奇呢?无人直升机要想在空中稳稳地飞,还得靠很多小秘密呢。
它有个控制系统,这个控制系统就像是无人直升机的小脑袋。
这个小脑袋可聪明啦,它能知道无人直升机现在的高度、速度、方向等等。
比如说,如果无人直升机飞得太高了,这个控制系统就会让旋翼转得慢一点,这样它受到的向上的力就会变小,然后就会慢慢降低高度啦。
要是它往左边偏了呢,控制系统就会调整旋翼的转动角度,让它往右边修正,就像你骑自行车的时候,如果车往一边歪了,你就会调整车把让它走直道一样。
还有啊,无人直升机的动力来源也很有意思。
有些无人直升机是用电池的,就像你的小玩具车一样,电池给电机提供能量,电机再带动旋翼转动。
这种用电池的无人直升机比较环保,而且噪音也比较小呢。
还有一些无人直升机是用燃油的,就像那些大飞机一样,燃油燃烧产生能量,推动发动机运转,然后带动旋翼。
这种燃油的无人直升机往往动力更强劲,可以飞得更高更远。
你知道吗?无人直升机在飞行的时候还得考虑风的影响呢。
风就像是一个调皮的小捣蛋鬼,有时候会把无人直升机吹得东倒西歪。
但是咱的无人直升机可不会轻易被风打败哦。
无人机基础ppt课件

电机一般也是四位数字编号,前面两位代表 定子直径,后面两位数字代表定子高度,单位 是mm。注意,不是外壳。
简单来说,前面2位越大,电机越肥,后面2 位越大,电机越高。又高又大的电机,功率就 更大。
例如: 8318电机,其定子直径即为83mm, 其定子高度为18mm;
6215电机,其定子直径即为62 mm, 其定子高度为15 mm
放电电压不得低于3.6V,一般设置的报警电压为3.7V,电池使用时,务必使用报警器,或 放电 者在上电时观察无人机本体上的电压显示器
其他辅助设备: 电台、Wifi 模块等、增益天线、跟
踪天线、HDMI转AV模块
16
多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需 要,一般还需要配备电池、遥控器及飞行辅助控制系统。
17
机架
机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。一般使用 高强度重量轻的材料,例如碳纤维、PA66+30GF等材料。
4
培训目的
通过讲解了解无人机基本知识,认识无人机各 部分系统功能、运行原理。 通过此次培训认识无人机的工作原理,飞行原 理。 熟练掌握飞行器基础知识,并能判断故障。
5
按不同使用领域来划
军用无人机 民用无人机 消费级无人机
在民用领域,无人飞行器已经和即将使用的领域多达40多个,例如影视航拍、农业植保、海 上监视与救援、环境保护、电力巡线、渔业监管、消防、城市规划与管理、气象探测、交通
24
有刷电机优缺点:
• 1)有刷电机缺点: • a、电刷和换向器之间有摩擦,造成效率降低、噪音增加、容易发热,
有刷电机的寿命要比无刷短几倍。 • b、维护麻烦,需要不停的换电刷。 • c、因为电阻大,效率低、输出功率少。 • d、电刷和换向器摩擦会引起火花,干扰大。 • 2)有刷电机优点: • a、低速扭力性能优异、转矩大。 • b、相比无刷电机,少了很多电子零件,价格比无刷的便宜。 • c、由于少了电子零件,少了由于传感器受干扰、电子零件失灵等影响。
固定翼无人机飞行原理
固定翼无人机飞行原理
固定翼无人机是一种能够在空中自主飞行并完成多种任务的航
空器。
其核心是飞行控制系统,包括飞行控制器、遥控器、传感器和自主导航系统等。
固定翼无人机的飞行原理是通过机翼产生升力,机身产生阻力,以及控制舵面调整飞行方向和姿态。
机翼的前缘和后缘之间的曲面叫做翼型,翼型的不同会影响飞行性能。
在飞行中,机翼上的空气流动和翼型的作用使得机翼上方的气压低于下方,从而产生升力。
升力的大小与机翼的面积、机翼的倾角、飞机的速度、空气密度等因素有关。
为了控制飞机的姿态和方向,固定翼无人机配备了多个舵面,分别为副翼、升降舵和方向舵。
副翼的作用是调整飞机的滚转角度,升降舵的作用是调整飞机的俯仰角度,方向舵的作用是调整飞机的偏航角度。
这些舵面通过电机驱动,由飞行控制器进行控制。
固定翼无人机的飞行还需要考虑飞机的重心位置和飞机的稳定性。
重心位置可以通过调整电池和其他电子设备的位置来调整。
稳定性则是通过配备陀螺仪和加速度计等传感器来实现的。
这些传感器可以感知飞行器的姿态和运动状态,并通过飞行控制器进行计算和调整,以保持飞机的稳定性。
总的来说,固定翼无人机的飞行原理涉及机翼升力、舵面控制、重心位置和稳定性等多方面因素。
优秀的飞行控制系统和传感器是保证飞机安全、稳定和高效飞行的关键。
- 1 -。
第2章无人机组成及飞行原理
固定翼无人机的结构组成
5、动力装置
目前民用领域主要适用往复式活塞发动机和无刷电动机。无刷电动机多用于多旋翼。 往复式活塞发动机是一种内燃机,由气缸、活塞、连杆、曲轴、机匣和汽化器等组
成。它的工作原理是燃料与空气的混合气在气缸内爆燃,产生的高温高压气体对活塞做 功,推动活塞运动,并通过连杆带动曲轴转动,将活塞的往复直线运动转换为曲轴的旋 转运动。曲轴的转动带动螺旋桨旋转,驱动无人机飞行。整个工作过程包括吸气、压缩、 做功和排气四个环节,不断循环往复地进行,使发动机连续运转。
标称空载KV值 电机KV值定义为“转速/伏特”,意思为输入电压增加1V,无刷电机空转转速增加的
转速值。例如,1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压, 电机空转就2000转了。单从KV值,不可以评价电机的好坏,因为不同KV值有不同的适 用不同尺寸的浆绕线匝数多的,KV值低,最高输出电流小,但扭力大,上大尺寸的浆; 绕线匝数少的,KV值高,最高输出电流大,但扭力小,上小尺寸的浆。
固定翼无人机的结构组成
3、尾翼
尾翼是用来配平、稳定和操作固定翼无人机飞行的部件,通常包括垂直尾翼(垂尾)和 水平尾翼(平尾)两部分。
水平尾翼由水平安定面和升降舵组成,通常情况下水平安定面是固定的,升降舵是可动的。 垂直尾翼包括固定的垂直安定面和可动的方向舵。方向舵用于控制飞机的横向运动,升降 舵用于控制飞机的纵向运动。 尾翼的形状也是多种多样的,选择尾翼形状,首先要考虑的是能获得最大效能的空气动力, 并在保证强度的前提下,尽量使结构简单、质量轻。
多旋翼无人机的构成
5、动力电源—电池
电池是将化学能转化成电能的装置。在整个飞行系统中,电池作为能源储备,为整个 动力系统和其他电子设备提供电力来源。目前在多旋翼飞行器上,一般采用普通锂电池 或者智能锂电池等。
无人机技术的应用与发展前景
无人机技术的应用与发展前景一、引言无人机技术随着科技的不断发展,正快速普及。
无论在军事、民用还是商业等领域,无人机都展现出了强大的应用潜力。
本文将简单介绍无人机的技术原理和发展历程,重点探讨无人机的应用场景和未来发展前景,希望能够为读者提供有价值的信息和思考。
二、无人机技术原理与发展历程无人机(Unmanned Aerial Vehicle, UAV)是装备有先进传感器以及自主控制系统的无人驾驶飞机。
无人机技术起源于20世纪初期,最早应用于军事领域。
1907年,美国人萨莫尔斯特和乌特提出了"航空无人驾驶飞机"的设想。
1916年,法国人儒勒-维特里和罗伯特-埃斯特林发明了一种飞行时间为30分钟、装载了8公斤药品的无人飞机"米歇尔号",在第一次世界大战中用于情报侦察和手榴弹袭击。
随着航空技术的发展,无人机逐渐成为一种高效、低成本、灵活多变的新一代航空器。
无人机的技术原理大致分为控制系统、电源和动力系统以及传感器三个方面。
控制系统是无人机的“大脑”,通过无线电与地面站、卫星等进行通信和指挥。
电源和动力系统是无人机的“心脏”,它采用电能、燃料等来提供动力,并配备了螺旋桨等组件来实现飞行。
传感器是无人机的“眼睛”,它可以采集到飞行环境中的不同信息,如气象、图像、声音等。
三、无人机的应用场景1. 军事领域无人机在军事领域应用广泛,主要用于情报侦察、攻击打击、运输和通信等方面。
例如,美军曾经使用MQ-1“捕食者”无人机在伊拉克和阿富汗地区进行反恐打击,2011年5月1日,美国海豹突击队利用无人机在巴基斯坦地区搜捕到了奥萨马·本·拉登。
2. 民用领域无人机在民用领域也有着广泛的应用,如农业植保、电力巡检、地理测绘、环境监测、新闻报道等。
例如,无人机在农业领域可以采集土壤、作物、水源等数据,用于科学准确地进行植保决策,提高农业生产效益。
3. 商业领域随着技术的不断进步,无人机被广泛深入的应用于商业领域。
无人机的工作原理
无人机的工作原理
无人机的工作原理如下:
根据流体力学的基本原理,流动慢的大气压强较大,而流动快的大气压强较小。
由于机翼一般是不对称的,上表面比较凸,而下表面比较平(翼型),流过机翼上表面的气流就类似于较窄地方的流水,流速较快,而流过机翼下表面的气流正好相反,类似于较宽地方的流水,流速较上表面的气流慢。
大气施加与机翼下表面的压力(方向向上)比施加于机翼上表面的压力(方向向下)大,二者的压力差便形成了升力。
[摘自升力是怎样产生的]。
所以对于通常所说的无人机,都是需要助跑,当飞机的速度达到一定大小时,无人机两翼所产生的升力才能抵消重力,从而实现飞行。
对于多旋翼来说,旋翼旋转会产生向上的升力和空气给旋翼的反作用力矩,在设计中需要提供平衡旋翼反作用扭矩的方法,通常有单旋翼加尾桨式(尾桨通常是垂直安装)、双旋翼纵列式(旋转方向相反以抵消反作用扭矩)等;而旋翼机则介于飞机和直升机之间,旋翼机的旋翼不与动力系统相连,由无人机飞行过程中的前方气流吹动旋翼旋转产生升力(像大风车一样),即旋翼为自转式,传递到机身上的扭矩很小,无需专门抵消。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人飞机原理
无人飞机,也叫做无人机,是指不需要搭载人员飞行的飞行器。
它通过预先设定的航线、飞行高度和速度,由电脑、遥控器或者自主
飞行系统进行飞行。
无人飞机由于其低成本、高效率、低飞行高度和
适用于多种环境等特点,已经广泛应用于民用和军用领域。
无人机的工作原理主要包括以下几个方面:
1.飞行控制系统:无人机的控制系统包括舵机、电机、无线通信
设备、电子设备等。
这些设备通过航向、俯仰、横滚和飞行高度等参
数的控制,实现无人机的稳定飞行。
2.相机或传感器:无人机上搭载多种传感器,如热成像仪、雷达、红外线摄像头等,还有普通相机。
这些设备通过搜集信息、传输和分析,实现数据的获取和分析。
3.无线通信系统:无人机由于其远距离、低高度和机动性等特点,通常采用无线通信技术,如Wi-Fi、蓝牙或者专用的通信设备,用于和地面控制中心、其他无人机通信和数据传输。
无人机的应用范围非常广泛,在军事领域,无人机主要用于侦查、侦察、打击和救援等任务。
在民用领域,无人机主要应用于测绘、农业、航拍拍摄、监控、公共安全、天气预报、应急救援等领域,还出
现了无人配送、无人小汽车等新的领域。
但是,无人机面临着一些问题,如飞行安全问题、隐私问题、干扰问题等。
因此,无人机的使用应该遵循相关的规定和标准,确保其安全和合法性。
总之,无人机是一种十分先进的技术,其应用广泛,将会在未来更加重要。
无人飞机的原理和应用,对于相关人员学习和使用有很大的指导意义。