锚泊系统系泊系统计算方法
系泊系统悬链线方程

系泊系统悬链线方程引言系泊系统是一个用于固定船只或其他浮动物体的装置。
在海洋工程中,悬链线常被用作系泊系统的一部分,用于支撑和固定船只。
了解悬链线方程可以帮助工程师更好地设计和计算系泊系统,以确保船只的安全。
本文将介绍悬链线的概念以及如何推导悬链线的方程。
我将向您解释悬链线的基本原理,并提供一个简单的数学推导,从而得出悬链线的方程。
悬链线的基本原理悬链线是指在自由悬挂的条件下所呈现的线形。
当在自由空间中的两个点之间拉起悬链线时,其形状与悬链线的长度和两个拉力有关。
悬链线形成的原因是张力与重力在平衡状态下相互作用。
在船只的系泊系统中,悬链线呈现出类似于倒钟的形状。
这是因为船只的重力在悬链线上形成一个上向的张力,而风力和浪力则在悬链线上形成一个下向的张力。
这种平衡状态使船只能够固定在一个位置,并抵抗外部的力量。
推导悬链线的方程为了推导悬链线的方程,我们可以使用悬链线微元的分析方法。
假设有一段长度为ds的悬链线,在这段悬链线上的张力为T,重力为dF。
考虑到悬链线的长度非常小,我们可以使用近似的方法进行推导。
首先,我们可以将悬链线微元的受力分解为水平方向和垂直方向的分量。
垂直方向的受力平衡可以表示为:T * cosθ = dF其中,θ表示悬链线微元的倾角。
我们可以将dF表示为悬链线微元的重力分量dm乘以重力加速度g,即dF = dm * g。
然后,我们可以将水平方向的受力平衡表示为:T * sinθ = T * dθ悬链线微元的弧长长度可以表示为:ds = R * dθ其中,R表示悬链线微元与悬链线中心线的距离,也就是悬链线的半径。
将上述方程联立解得:T * cosθ = dm * gT * sinθ = R * dθ我们可以进一步将cosθ与sinθ之间的关系表示为:sinθ = √(1 - cos²θ)将这个关系带入前面的方程,我们可以得到:dm * g = R * dθ * √(1 - cos²θ)对上述方程进行微分运算,并将dm表示为dM/dθ:g * dM/dθ = R * dθ * √(1 - cos²θ)将上述方程进行变量分离和积分运算,得到:∫dθ/√(1 - cos²θ) = ∫g * R / M dM其中,M表示总质量等效值。
船舶工程中船舶锚泊与系泊系统的研究
船舶工程中船舶锚泊与系泊系统的研究一、前言船舶锚泊与系泊系统是船舶工程中一个重要的组成部分,其作用是确保船舶在停靠过程中能够保持稳定并且不受外界因素影响。
因此,对于船舶锚泊与系泊系统的研究具有重要意义。
本文将从锚泊和系泊两个方面对船舶锚泊与系泊系统进行研究,主要涉及相关技术和设备、系统维护保养等内容,以期对船舶船东、船员和相关技术人员提供相关信息和指导。
二、锚泊技术和设备锚泊是指船舶在停靠过程中使用锚钩固定船舶,使其能够保持在某个位置并且不受外界因素影响。
目前在船舶锚泊领域,常用的锚泊技术包括自由锚泊和拖锚泊。
1. 自由锚泊技术自由锚泊是指船舶在停靠过程中使用锚钩固定船舶,但是不需要与岸上设备相连。
其优点是操作简单,成本低廉,但是其使用范围受限制,只适用于靠近海滩和较为平静的海域。
此外,在使用自由锚泊时,需要注意锚泊位置是否合适,避免船舶因为海流和风力的影响而失去稳定。
2. 拖锚泊技术拖锚泊是指在船舶停靠过程中,使用锚钩和锚链把船舶与岸上设备连接起来,以保证船舶在停靠过程中的稳定。
拖锚泊技术适用于海浪较大的海域,其优点是可靠性高、适用范围广,但是需要操作人员具备一定的技术和经验。
3. 锚泊设备在船舶锚泊过程中,常用的设备包括锚链、锚钩和锚绳。
其中,锚链是将锚钩和船舶连接在一起的关键设备,其材质需要承受海水和海风等不利条件,同时要具有足够的强度。
而锚钩则需要考虑形状和大小,以确保在海浪和风力的影响下,能够牢固地固定船舶。
三、系泊技术和设备系泊是指将船舶与岸上设备相连,以保持船舶在静止状态下保持稳定。
相对于锚泊技术,系泊技术在船舶停靠领域中应用更为广泛。
在系泊技术中,常用的类型包括滚桶系泊、沉桶系泊和垃圾桶系泊等。
1. 滚桶系泊技术滚桶系泊技术是指将一组滚筒安装在岸上设备中,然后在滚筒上拴上缆绳,然后在船舶上的泊位和缆绳上安装胶管,以确保缆绳不会轻易脱落。
滚桶系泊技术的优点是在船舶停靠过程中,可以确保缆绳的张力并且不会轻易脱落。
干舷、吨位、锚泊计算书

系船索:φ 32 丙纶绳 140m× 根,破断负荷 112.8KN。 4 其 他:配 JZ2-H22-4 型 50KN 卧式电动绞缆机 1 台,A315 型双柱带缆桩 15 只,A450 型双柱拖缆桩 2 只,150 型导缆滚轮 4 只,300 型双滚轮导缆钳 2 只,A260 ×170 型导缆孔 13 只, D320×200 型导缆孔 2 只, 型系泊纤维索卷车 2 台。 34
3.2.3 非标准舷弧对干舷的修正值 f3 计算 §2.3.3 l A a f3 500 1.5 L L 20 . 512 30 . 709 17 . 994 = 500 1 .5 107 . 28 mm
72 . 012 72 . 012
6 1
共 3 页 第 3 页
(2)艏楼型容积 v22 v22=
1 6
(10.16+4×7.095+0)×8.725×2.2=123.10 m3
(3)甲板室型容积 v23 v23=8.68×7.5×2.2+5.5×7.5×2.2+4.4×6.0×2.3=294.69 m (4)货舱口型容积 v24 v24=42.0×7.2×1.48=447.10 m3 (5)舱盖板下型容积 V25 v25=(16.94+22.97)×7.5×0.375=112.25 m3 (6)烟囱、天窗型容积 v26 v26=1.63×1.21×4.18=8.24 m3 4 净吨位 NT 估算 §3.3.1 NT = K3·GT =0.56× 1423=796 式中:系数 K3 由表 3.3.1 选取 K3=0.56
式中:标准舷弧面积 A 查表 2.3.2(4)得 A=30.709m2 实际首舷弧面积 a F 实际尾舷弧面积 a A
系泊系统设计简介

四、其他
常用规范:
1. API RP 2SK-Design and Analysis of Stationkeeping Systems for Floating Structures 2. API RP 2SM-Recommended Practice for Design, Manufacture, Installation, and Maintenance of Synthetic Fiber Ropes for offshore Mooring 3. DNV Offshore Standard E301-Position Mooring 4. ABS Guide For Building and Classing Floating Production Installation 5. NI493-Classification of Mooring Systems for Permanent Offshore Units 6. GLND 0032-Guidelines for Moorings
根据求解范围的不同,可分为耦合分析与非耦合分析。
三、系泊系统分析方法
静力法,准静(动)力法,动力法
所谓静力是指不随时间变化的力,反映在系泊系统上,是指环境载荷 中的定常部分。 系泊系统的动力包括两方面来源: 1. 上浮体,包括水动力,波动风等 浮体振荡运动及水平漂移
2. 系泊系统,包括缆绳上的附加质量与阻尼,缆绳与海底的碰撞与摩 擦,系泊系统上配重与浮筒振荡运动 学与动力学状态,对上浮体也会造成影响。 改变系泊系统的运动
三、系泊系统分析方法
静力法,准静力法,动力法
静力法:计算浮体所受的平均载荷,根据悬链线方程或系泊系统受力-位移曲线将载 荷在系泊系统间进行分配。 准静力法:考虑上部浮体的定常和慢漂运动,忽略系泊系统本身的动态效应,忽略 浮体波频运动队系泊系统影响,根据悬链线方程或系泊系统受力-位移曲线将载荷在 系泊系统间进行分配。
IACS关于锚泊和系泊统一要求的更新及其影响
IACS关于锚泊和系泊统一要求的更新及其影响摘要:IACS关于锚泊和系泊的统一要求在最近三年内更新两次,对于原有的锚泊、系泊设计带来了比较大的变化。
文章对新生效的部分进行分析,结合散货船和集装箱船两型船计算结果比较差异之处,总结设计过程中需要注意的问题,为类似船舶的系泊设计提供参考。
关键字:IACS统一要求;锚系泊设计;变通设计Main change and influence of IACS unfied Requirements (UR) and Recommendation for Anchoring and mooring equipmentZheng Tian-xiangAbstract: IACS unfied Requirements (UR) and Recommendation for Anchoring and mooring equipment has been amended twice within 3 years. Considering the main change and influence of such modification, the anchoring and mooring design need to be updated accordingly. We analyzed the specific changes of the calculation method based on bulk carrier and container vessel as examples, notice the issues need to be paid attentions to during later design stage.1.背景国际船级社协会IACS考虑船舶尺度大型化趋势越来越显著,原有的锚泊、系泊规范已逐渐落后于现状。
因此在2020年9月修订了Rev.4版的Recommendation No. 10-Anchoring, Mooring and Towing Equipment,在2020年9月修改了Rev.7版的UR A1-Anchoring Equipment和Rev.5版的UR A2-Shipboard fittings and supporting hull structures associated with towing and mooring on conventional ships。
码头系泊力计算
X X 货柜码头系泊力计算书一、计算说明:拟建XX国际货柜码头由于靠岸壁的水深不足,不能停靠大型的集装箱货船,要求XX国际货柜码头向外延伸4.2米,在原有的码头前沿增加6个浮动箱式护舷,间距为32米设一个,每个浮动箱式护舷长7.5米,宽3.4米,由6个浮箱箱体、护舷橡胶与系泊系统等组成的浮动钢质浮箱,作为码头的延伸部分,通过该设施可以满足停靠10万吨级集装箱船舶。
计算内容:1.钢质浮箱通过左右两根系缆绳固定,在台风时,按八级风计算,超过八级风时船舶离港,去锚地停泊,此时主要考虑浮箱本身的安全。
而船舶靠离岸的安全主已由专家负责论证。
因此,我们仅对浮箱在台风时无靠泊状态的最大受力进行计算与安全分析。
风与波浪计算要素取13级台风,设计最大风速取47.1m/s,设计最大波高为1.9m,设计最大周期为4.9秒. 2.在八级风及以下的情况下,箱体的结构应满足停靠10万吨级的集装箱,此时,我们对浮箱在平风时有靠泊状态的最大受力进行计算与安全分析。
风速按极端风速20.7m/s,设计最大波高为1.4m,设计最大周期为4.9秒. 3.在八级风及以下的情况下,箱体的护舷碰垫应满足停靠10万吨级的集装箱船时的挤靠力及对撞击力的吸能量的要求。
4. 由于低潮与高潮的潮位差较大,系缆绳的长度通过计算确定,既要有足够长度又不能碰到原码头护舷。
二、设计依据:根据XXXX航务工程勘察设计院《XX港货运码头改造工程方案设计》三、计算规范:1、2001年“钢质海船入级与建造规范”。
2、TJT 294-98 《斜坡码头及浮码头设计与施工规范》。
3、日本《JSDS造船舾装设计基准》。
4、JTJ 215-98 《港口工程荷载规范》。
四、设计条件:根据《XX港区泊位靠泊能力论证》1.大型集装箱船舶船型尺度表船型尺度表船舶吨级载箱数DWT(t)总长L 型宽B 型深H 满载吃水T (TEU)7000030040.324.3144601~600010000034742.824.414.56001~820020.7m/s 47.1m/s设计低水位:0.72m 。
系泊系统的设计数学建模差分法
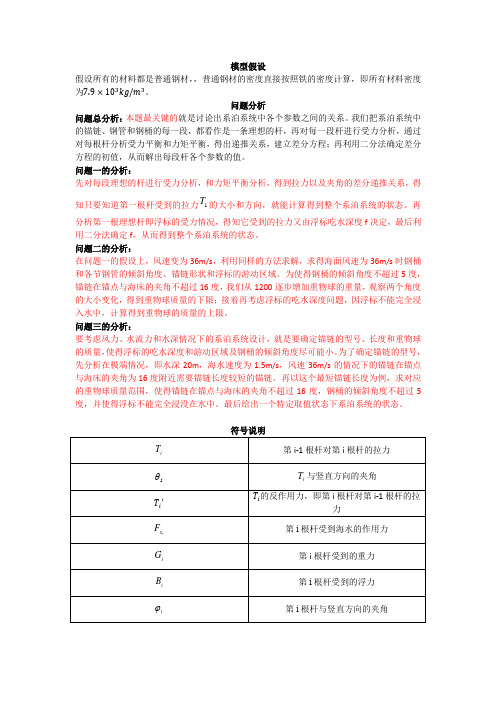
模型假设假设所有的材料都是普通钢材,,普通钢材的密度直接按照铁的密度计算,即所有材料密度为7.9×103kg/m3。
问题分析问题总分析:本题最关键的就是讨论出系泊系统中各个参数之间的关系。
我们把系泊系统中的锚链、钢管和钢桶的每一段,都看作是一条理想的杆,再对每一段杆进行受力分析,通过对每根杆分析受力平衡和力矩平衡,得出递推关系,建立差分方程;再利用二分法确定差分方程的初值,从而解出每段杆各个参数的值。
问题一的分析:先对每段理想的杆进行受力分析,和力矩平衡分析,得到拉力以及夹角的差分递推关系,得T的大小和方向,就能计算得到整个系泊系统的状态。
再知只要知道第一根杆受到的拉力1分析第一根理想杆即浮标的受力情况,得知它受到的拉力又由浮标吃水深度f决定,最后利用二分法确定f,从而得到整个系泊系统的状态。
问题二的分析:在问题一的假设上,风速变为36m/s,利用同样的方法求解,求得海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
为使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度,我们从1200逐步增加重物球的重量,观察两个角度的大小变化,得到重物球质量的下限;接着再考虑浮标的吃水深度问题,因浮标不能完全浸入水中,计算得到重物球的质量的上限。
问题三的分析:要考虑风力、水流力和水深情况下的系泊系统设计,就是要确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
为了确定锚链的型号,先分析在极端情况,即水深20m,海水速度为1.5m/s,风速36m/s的情况下的锚链在锚点与海床的夹角为16度附近需要锚链长度较短的锚链。
再以这个最短锚链长度为例,求对应的重物球质量范围,使得锚链在锚点与海床的夹角不超过16度,钢桶的倾斜角度不超过5度,并使得浮标不能完全浸没在水中。
最后给出一个特定取值状态下系泊系统的状态。
符号说明模型建立与求解模型准备:对第i根杆的受力进行分析,如图1:图1将受力分析图简化成图2:图2i B F 为第i 根杆受到的重力i G 和浮力i B 的合力,定义竖直向上的方向为正方向,则i B F 为负值。
应用文-海洋平台系泊数值分析基本理论及计算方法
海洋平台系泊数值分析基本理论及计算方法'海洋平台系泊数值分析基本理论及计算方法通常认为,船舶码头系泊的主要因素可以看作以下几个部分:码头、护舷、系泊缆、系泊结构物(船舶或者平台)、载荷。
以上几个因素相互影响,相互作用,最终决定系泊的结果。
当前系泊状态主要受到风、浪、流三种载荷,按照静力计算方式或者采用公式可以对风、流载荷进行估算和确定,但是波浪力比较特殊,是其中唯一的动载荷,码头系泊的动态船舶运动特性可以看作波浪与结构物的相互作用。
波浪力在早期的研究中往往简化为平均波浪力或者等效波浪力,在考虑风载荷和流载荷的叠加后,大多采用静态、准静态方法进行实际的缆绳受力、护舷受力计算,并没有考虑到波浪的动态属性。
系泊缆绳的张力计算需要遵循一定的计算准则,在上个世纪80年代左右,chemjawski、Michaell就已经提出了一种解析方法来求解计算船舶系泊缆张力。
求解的方法有以下几个重要步骤:1)通过计算确定设定的方向船舶承受的风、流和等效静波浪力;2)计算求得由船舶横摇、纵摇、垂荡运动引发的垂直方向静回复力;3)用系泊揽本身属性如长度、横截面积、方向角度、弹性模量(非线性)等属性作为基础计算求出系泊缆绳的刚度矩阵;4)最后一步,求出整个系泊系统的总的刚度矩阵,采取提高载荷大小的方式进行迭代计算从而求得每个缆绳的张力值。
2 三维势流理论在早期的码头系泊计算时往往采用静力或者准静力的计算方法,后来理论,计算方式大多采用频域或者时域分析方法。
静力或准静力分析方法仅适用与水域状况较好、系泊船舶等运动不大的情况,由此得出系泊缆绳、护舷受力和系泊物体的运动。
时域方法结合三维势流理论、脉冲响应原理、缆绳护舷的非线性很好的解决了各种情况下系泊物体的码头系泊问题。
为了适应实际工程问题,三维势流理论针对流体的性质进行了相应的简化,假设流体为无粘性、无旋、均匀的且不可压缩的理想流体。
之所以这样简化是因为:l)波浪的波幅和系泊浮体相比量级很小,绕射作用明显大于粘性影响,所以忽略粘性;2)对于理想流体而言,初始运动无旋,之后任意时刻运动均无旋,无旋假定合理;3)流体本身的密度几乎不发生变化,水密度假设为均匀和不可压缩也是合理的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
锚泊系统系泊系统计算方法
Prepared on 22 November 2020 锚泊系统系泊分析 锚泊系统的分类 按系泊形式分为三种定位系统:单点系泊(SinglePointMooring)、辐射式系泊(Speadmooring)和动力定位(DynamicPositions)[62][9]。 以下主要介绍单点系泊系统和辐射式系泊系统。 3.1.1单点系泊(SinglePointMooring) 单点系泊系统与固定码头相比,它的最大特点即系泊方式是“点”,也就是大型油轮或超大型油轮可以系泊于近海海面上的一个深水“点”,然后进行装卸货操作。 单点系泊的优点如下: ➢ 单点系泊的将码头由岸边移至海上,解决了世界上绝大部分港口航道较窄、较浅、规模较小,不能与大型油轮和超大型油轮发展相匹配的矛盾; ➢ 单点系泊具有漂浮式和旋转式的特征,受气候影响较小; ➢ 节约投资:一般情况下,建设同样等级的固定码头,其费用远高于建设单点系泊系统。 单点系泊系统的分类[30][63][9] ➢ 转塔式单点系泊系统 转塔式锚泊系统是80年代中期发展起来的一种新型的单点系泊系统。其特点是在一定位浮体的内部或外部有一转塔,该转塔上系有由多根锚泊线组成的锚泊系统。转塔上还有多通道的旋转接头,用于传输油类或其它液体。被定位浮体可绕转塔作水平面内的360度回转,从而使浮体在风标效应作用下处于受力最小的状态。相对于其它型式的单点系泊系统,转塔锚泊适用于更大的水深及环境条件恶劣的海域。这种系统移动灵活,安装费用低,便于维修与保养。 转塔式系泊系统分为外部转塔式、内部转塔式、转塔/立管系统的变化(链配重平衡系统、浮式转塔立管系统、立管配重平衡系统等)等几种类型。 ➢ CALM(Catenaryanchorlegmooring) CALM是由重力来提供恢复力的系泊系统有悬链锚腿系泊系统。CALM系
统是由重力提供恢复力的系泊系统的典范,在海上油田开发及输油终端中有着广泛的应用。 按放射线布置的悬链系统是CA1 M单点的主要组成部分。锚链或钢索通常为6~8根,以6根居多这样.即使l根锚链或钢索破断.系统仍能维持稳定[24]。 CAIM有深水型和浅水型之分深水型因钢索重量较轻,回复力大而广泛采用钢索;浅水型因考虑到布置、操作、使用寿命及吸收冲击的能力而多采用锚链。 ➢ SALM(Singleanchorlegmooring) 此系统是利用水面附近或者水面上具有大浮体的垂向具有预张力的立管系统,深水中的单锚腿系泊((SALM-SingleAnchorLegMooring)系统将立管分为许多组件(一边使用钻井设备进行安装),并使其完全成为张力部件,除了在立管上部设置提供张力的浮筒外,还在每一段上设置浮箱以提供支持力。在悬链锚泊线上设置浮筒,可以有效地减少锚泊线的动张力,但位移较大[13]。 3.1.2辐射式(Spreadmooring)系泊系统的分类[30][63][9] 辐射式系泊方式保持船舶定位不管环境条件的变化,因此 其环境载荷的方向更敏感些。辐射式系泊系统模型由船在水平面上的慢变运动、环境载荷、水动力存储和系泊模型组成。 其特点是分散式布锚方式,使锚泊线占用空间较大,位移较小,必须考虑到管线、立管或其它水下设备的维修。其也可以与张力腿平台联合使用,可以有助于抵消张力腿平台TLP水平方向的载荷,减小其水平运动。 辐射式系泊定位效果较佳,但其系泊力往往较大。这是因为多点系泊状态的浮体受到锚系的约束较强,无法顺着外载荷较自由地移动,因而作用于浮体的外载荷通常较大。另外,根据力学原理,如果多点系泊锚系中诸锚链之间的张角较大,也会导致较大的锚链张力。因此,定位效果和锚链张力是多点系泊系统两个令人十分关心的问题换言之.浮体运动和系泊力是辐射式系泊研究的重要方面。 3.1.3动力定位(DynamicPosition)[63] 动力定位可以作为单独的定位系统也可以辅助锚泊系统,动力定位通常使用声波通过音速箱来定位,或通过GPS定位。定位系统(锚泊系统或具有推进功能的装置)由计算控制。 锚泊系统数值计算方法 3.5.1锚泊系统数值计算方法按力学特性划分为静力、准静力和动力数值分析方法。 3.5.1.1静力数值分析方法[34][39][45] 静力数值分析方法计算简便,能够满足一定的精度要求,在工程中得到广泛运用。在运用此分析方法时,常常是已知浮式结构物所受的外力,然后根据锚泊力的水平分量与风力和流力的水平分量相平衡的原则,确定浮式结构物的平衡位置,并求出在此平衡位置时,锚链对浮式结构物着链点的拉力,此拉力即为系泊外力,供浮式结构物结构强度校核用。 3.5.1.2准静力数值分析方法[16][24][11][15][68][69][1] 准静力数值分析方法的依据是系泊结构物在波浪中的水平运动主要是低频慢荡运动,锚泊系统的波频振荡对这一低频慢荡的影响很小,可假设锚泊线只作低频振荡而忽略其作用于结构物上的锚链动力。所以计算结构物的纵荡运动时可采用准静力方法确定锚链所提供的复原力。在得到了系泊结构物的运动响应以后,再根据系泊点的运动,确定锚系载荷。锚系和系泊结构物是分开计算的,没有考虑相互的影响。在浅水情况下,这是一种非常有效的方法。但有试验结果表明,当水深较大时,只根据低频慢荡运动决定锚泊线载荷,将低估锚泊线的受力,而波频量的影响是不可忽略的。波浪纵荡力可取“三一”值,海流力和风力尽管实际上存在随机性,工程上一般当作定常力计算,考虑到最危险的情况,风、浪、流三种力在同一方向上叠加,作为船舶所受到的总的纵向力,并将此力作为平台所受到的系泊力。考虑到最危险工况时的情况,显然当风、浪、流三种力处于同一方向时,出现最大的系泊力,此时,系泊力等于三种力的线性叠加。在求解锚链系统的受力和变形时,计算过程均需采用多次迭代的方法,最终找到锚链顶端受力与锚链顶端位置的关系。 3.5.1.3动力数值分析方法[23][29][53][54][66][68][74][77][92][114] 锚泊系统在波浪以及风流等环境作用下,其动力响应和锚泊线的动张力确定是一个较复杂的力学问题。对于锚泊线的动张力计算,一般分为时间域和频率域两种方法。时间域的方法有集中质量法、标准有限元技术、有限差分法。在计算结果精度相同的前提下,有限差分法需要较少的时间而有限元法在剖分单元相同的条件下,更容易收敛和得到合理的计算结果。时域方法通常基于有限元技术的共识,必须进行高度集中的计算,势必增加计算成本。频域法一般用于求解线性问题,对非线性问题采用线性化的处理方法。 3.5.2锚泊系统数值计算方法按描述锚泊线的特性可分为悬链线法Chebyshev多项式法、抛物线理论、集中质量法、有限元法、有限段法、有限差分法和摄动法等。 3.5.2.1悬链线法[2][4][5][11][24][20][25][32][33][45][49][50] 悬链线法是一种简单的解析方法,即传统展开式锚泊系统,具有悠久的使用历史,能适应较恶劣的海洋环境,在当前的锚泊定位技术中仍然占有重要的地位。其锚泊线被看作是完全挠性的,即链索不能传递弯矩参见文献。也有人指出悬链线是指一种具有均质、完全柔性而无延伸的链或索自由悬挂于两点上时所形成的曲线。一般活动式平台的锚链,由于本身有拉伸和受到海流力的作用,与理论上的悬链线并不完全吻合,但使用上仍常用悬链线来描述锚索链的特性,而忽略环境动力(浪和流)、缆索的弹性伸长以及本身的动力效应(振动)的影响。因悬链线应用非常广泛,这里就不再累述了。 3.5.2.2Chebyshev多项式法[44][128] 为了满足工程中的实际应用,利用了多项式拟合方法,根据分段外推 -校正法得出锚链受力与顶端位置的多项式表达关系,应用该多项式表达式可根据浮体的空间位置直接内插求解确定锚链的张力。 应用二维和三维Chebyshev多项式,建立了锚链顶端水平和垂向拉力与锚链顶端水平、垂向位置,及水流速度的函数关系Chebyshev多项式是在区间[-1,1]上逼近任一函数的一种重要工具,被称为最大最小逼近函数,与其他函数相比它可以保证在插值区间内最大误差为最小。对于一维 数可计算其近似值为: 式中为Chebyshev多项式的展开系数(j=1,2,…..,N)。N为多项式的次数。 其中n次Chebyshev多项式用表示,其定义为: 为Chebyshev多项式系数。 当自变量区间不在[-11]范围内时,可采用线性变换将其转化到[-11]区间内,最后利用Chebyshev多项式的正交性计算出Chebyshev展开系数: 其中为Chebyshev插值基点,.。 依据Chebyshev多项式拟合和分段外推-校正的数值计算方法,对静水和水流中锚链,建立了锚链张力与锚链顶端位置的多项式函数表达关系,该多项式表达关系可方便、快速地用于波浪、水流与锚链-浮体系统相互作用的实时模拟中。 3.5.2.3抛物线理论[17] 十七世纪,伽俐略首先研究了两端固定、且不可伸长的索或链的的曲线形状,称之为“悬链曲线”。“悬链曲线”的解是几何学家JamesBemalli等人于1691年开始建立的。因为方程是超越方程,由于计算上的困难而不能直接用于工程计算,只能根据实际工程的要求,采用不同的近似计算方法。抛物线理论就是其中的一种近似计算理论。 所谓的抛物线理论,实质上是取悬链曲线泰勒级数展开式的第一项,然后经过修正得到的。总之,“抛物线”理论在物理意义上包含了两条对立的假设,即视链的自重沿x轴均匀分布,同时又视链的自重沿曲线均匀分布。由于上述两条假设是对立的,故“抛物线”理论的适用范围是有限的。 3.5.2.4集中质量法[13][20][129] 集中质量法是连续的缆索以一组由无质量的弹簧连接起来的离散的集