仿真训练系统
仿真训练器驾驶台系统的设计和实现

起 重机是 港 口、 路 货 场 及 工矿 企 业装 卸 货 铁 物 的主要 设备 , 随着 港 口起重设 备 日益朝着 高速 、 大型化 及 自动 化方 向 的发展 , 备成本 日益增 高 , 设 对操作 人员 素质 要 求 愈 来 愈 高 。同时 , 作人 员 操 的技术 熟练程 度对 港 口生产安 全 、 备使用 效率 、 设 使用 寿命及港 口经 济效 益起着决 定性 的作 用 。随 着现代 科学技 术 的迅速 发展 和港 口生产水平 及管 理水平 的提高 , 用 计 算机 系统 进 行对 司 机仿 真 利 培训 已经成 为培养 高素 质人 员 的迫 切需要 。 使 用仿真 训 练器代 替实机 进行 培训具 有 以下 优点 :) I 安全 性好 。2 经 济性好 。3 功 能强 。4 ) ) ) 适用 面广 。因此 , 重 机仿 真训 练 器具 有 广 泛 的 起
仰 机构 等 。而在 仿 真训 练 器 中 , 了达 到 逼 真 的 为
I引 言
仿 真效 果 , 用真 实起重机 的驾 驶 台面板 ( 2 。 使 图 ) 使 用者 通过 驾驶 面板 发 出 操 作指 令 后 , 由计 算机 通 过 I0 口读人 后 , / 经过 初步处 理 , 将 得到 的数 再 据 经过 网络 传送 给力 学 模 型 , 然后 由力 学 模 型驱 动 视景 系统 , 响系统 和座 椅振 动 系统 等 模块 , 声 从 而达 到模拟仿 真 的效果 。
・
仿 真训 练器 中的驾驶 台面 板 与计 算 机之 间 的 信号 联系是 整个模 拟器 的重要 组成 部分 。它 担负 着驾驶 台面板上 按钮 和主令手 柄发 出 的各种 指令 信号 能被计 算机 接 受 的任 务 , 同时 也 要将 计 算 机
1 ・ 4
ECS-700系统在仿真训练装置中的应用

北京燕山石化公司教育培训中心仿真训练装置于1994年建成,是国内第1套炼油化工仿真训练装置[1]。
它采用实际规模的静设备、控制系统和动设备,不使用真实物料,采用水和低压氮气来替代实际装置中相应的液相和气相物料,反应动力学、传质与传热等过程由仿真模型进行实时模拟,是一套物理装置与数字仿真相结合的半实物仿真训练装置,可为企业职工和高校大学生提供逼真的技术培训。
仿真训练装置由仿真计算机、DCS 控制系统和一套包括了炼油化工典型工艺设备的装置这3部分组成。
现场生产装置来源于二甲苯生产装置的临氢异构单元,仿真模型使用通用过程工业严格模型开发系统(GeneralProcess RigorousEngineeringSystem ,GPRES )开发,DCS 控制系统于2018年进行升级改造为浙江中控ECS ⁃700系统。
ECS ⁃700系统对现场设备或仿真模型进行控制和操作管理,该系统和仿真模型之间通过OPC 技术进行数据交换。
1工艺流程简述结合仿真培训的特殊需要,工艺过程选取二甲苯生产装置异构化反应单元的分离工段[1],由吸附单元抽余液塔第5块塔板侧线来的物料,在临氢状态下用催化剂异构反应为含有平衡对二甲苯的C8芳烃[2],工艺流程如图1所示。
物料进入异构加料缓冲罐后,经异构加料泵送入混合进ECS ⁃700系统在仿真训练装置中的应用薛秀莉杨永红(北京燕山石化公司教育培训中心)摘要阐述了北京燕山石化公司教育培训中心仿真训练装置的生产工艺、装置构成以及基于ECS ⁃700系统构建的仿真训练装置控制系统配置。
针对控制的特殊要求,设计、实施了相应的控制方案,并介绍了ECS ⁃700系统和仿真模型的OPC 通信。
关键词仿真训练装置ECS ⁃700系统OPC 中图分类号TP273文献标识码B文章编号1000⁃3932(2020)04⁃0345⁃04作者简介:薛秀莉(1982⁃),工程师,从事化工自动化的研究,************************。
无人机模拟训练视景仿真系统设计与实现

时流畅的渲染速度 。
无人机 的操纵是 一个复 杂的过 程 , 操纵 手有着 很高 的 对 要求 。在无人机模拟训 练 中, 操纵 手需要 在一种 接近 实际 的
被仿真 的环境 中感知周 围环境 , 在很大 程度上 取决 于视景 这 系统提供 的实时视觉反馈来指 导操纵手及时 的控制飞机并 采 取相应 的战术动作 。所 以视景仿真 系统 在模 拟训练 中起到 了 重要 的作用 。本 文提 出 的视 景仿 真 系统 实施 方 案 , 在 P 能 c 机上实现实时仿真 , 以用来进行无人机 的操作训 练。 可
训 练视 景 软 件 采用 V C和 O E G P N L进 行 开 发 , 软件 运 行 在
wn 2平台 , i3 视景驱 动采 用实 时驱 动软 件 V g ea和 O E G P N L支
持, 场景数据库开发工具选 用 Mu ie ra r V g。 lG nCet 和 ea t o
3 1 视景中飞机 的行为模型 .
视景仿真计 算机 — 一视景仿 P, ,F6o T oM p _ 数据 4 GG6oG, o bs ’ l l 『 1 库
设
±
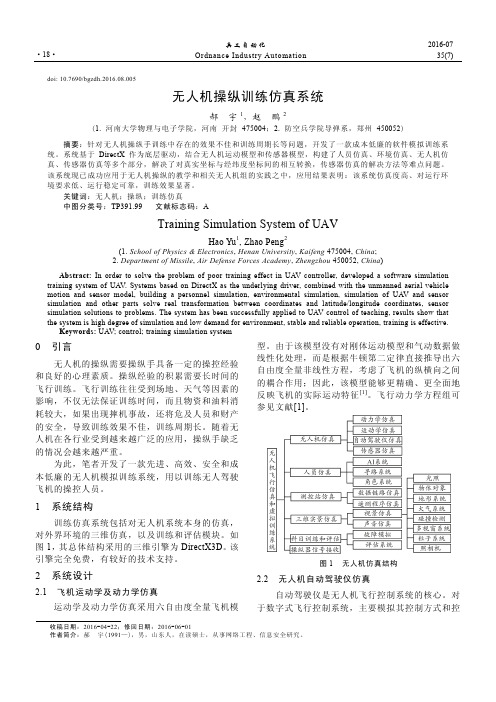
图 1 仿 真 系 统 结 构
1 1 仿 真 系统 结构 .
系统 3个子仿真系统计 算机之 间通过 局域 网传 输数 据。 仿真系统的结构如图 1 示。数学 模型 的仿真任务 是对某 型 所 号无人 机及机载平台建立 运动 学和动力 学数 学模 型 , 仿真 在 时对用户输 入的控制指令 进行仿 真计算 , 到虚 拟飞 机的现
林冬生 , 幸 鲍传关 郑 , (. 1 武汉军械士官学校 无人机 系, 湖北 武汉 4 0 7 ; 2 解放 军炮兵学院 5系, 30 5 . 安徽 合肥 20 3 ) 30 1
无人机操纵训练仿真系统
兵工自动化 2016-07Ordnance Industry Automation 35(7) ·18·doi: 10.7690/bgzdh.2016.08.005无人机操纵训练仿真系统郝宇1,赵鹏2(1. 河南大学物理与电子学院,河南开封 475004;2. 防空兵学院导弹系,郑州 450052)摘要:针对无人机操纵手训练中存在的效果不佳和训练周期长等问题,开发了一款成本低廉的软件模拟训练系统。
系统基于DirectX作为底层驱动,结合无人机运动模型和传感器模型,构建了人员仿真、环境仿真、无人机仿真、传感器仿真等多个部分,解决了对真实坐标与经纬度坐标间的相互转换,传感器仿真的解决方法等难点问题。
该系统现已成功应用于无人机操纵的教学和相关无人机组的实践之中,应用结果表明:该系统仿真度高、对运行环境要求低、运行稳定可靠,训练效果显著。
关键词:无人机;操纵;训练仿真中图分类号:TP391.99 文献标志码:ATraining Simulation System of UAVHao Yu1, Zhao Peng2(1. School of Physics & Electronics, Henan University, Kaifeng 475004, China;2. Department of Missile, Air Defense Forces Academy, Zhengzhou 450052, China)Abstract: In order to solve the problem of poor training effect in UAV controller, developed a software simulation training system of UAV. Systems based on DirectX as the underlying driver, combined with the unmanned aerial vehicle motion and sensor model, building a personnel simulation, environmental simulation, simulation of UAV and sensor simulation and other parts solve real transformation between coordinates and latitude/longitude coordinates, sensor simulation solutions to problems. The system has been successfully applied to UAV control of teaching, results show that the system is high degree of simulation and low demand for environment, stable and reliable operation, training is effective.Keywords: UAV; control; training simulation system0 引言无人机的操纵需要操纵手具备一定的操控经验和良好的心理素质。
装备抢救仿真训练技术研究及系统开发

装备抢救仿真训练技术研究及系统开发
王 广彦
摘 要: 针对装备抢 救实装训 练方式组织难度 大 、 训练成本高 的问题 , 研究 了装备抢救 仿真训练技术及其 基本
流程 , 包括装备抢救训练科 目 生成 、 装 备抢救方案选 择 、 装备抢救方案实施 、 装备抢救效果评估等 4 个环节 ; 设计 了装
Ab s t r a c t : I n o r d e r t o r e s o l v e t h e p r o b l e ms o f d i ic f u l t ma n a g i n g wo r k a n d h i g h t r a i n i n g c o s t i n t h e p r o c e s s o f a c t u a l e q u i p me n t s a l v a g e t r a i n i n g , t h e e q u i p me n t s lv a a g e s i mu l a t i o n t r a i n i n g t e c h n o l o g y i s s t u d i e d .T h e b a s i c p r o c e s s o f e q u i p me n t s a l v a g e s i mu l a t i o n t r a i n i n g i s s t u d i e d , i n c l u d i n g t h e s lv a a g e
Vo 1 .3 9. No . 1
火 力 与 指 挥 控 制
F i r e C o n t r o l &C o mma n d C o n t r o l
J a n, 2 0 1 4
基于JLVC的装备保障集成训练仿真系统设计方法

基于JLVC的装备保障集成训练仿真系统设计方法作者:任泽龙赵德勇袁红丽刘洁来源:《价值工程》2020年第22期摘要:在剖析美军JLVC联邦的发展现状和基于CEMS的JLVC2020体系框架基础上,研究提出了一种基于JLVC的合成部队装备保障集成训练仿真系统设计方法。
从装备保障要素集成训练具体内容和系统构成等角度,分析了合成部队装备保障集成训练仿真系统的构建需求,界定了装备指挥机构、武器装备、保障分队集成训练的系统形态和组织架构;从训练资源层、仿真中间件层、仿真功能层、仿真应用层等四个层次,构建了基于JLVC的训练仿真系统技术体系结构。
通过装备保障集成训练仿真系统组织架构和体系结构的研究,为合成部队集成训练仿真系统详细设计和训练环境构建提供了技术支撑手段。
Abstract: Based on analyzing the state-of-the-art of US armed forces Joint Live-Virtual-Constructive (JLVC) federation and systematic frame of JLVC 2020 based on Cloud-Enabled Modular Services (CEMS), an integrated training simulation system architecture design method of synthetic troops equipment support based on JLVC is put forward. From concrete content and system composition perspective of equipment support integrated training, the constructive requirement of synthetic troops equipment support integrated training simulation system (STESITSS) is analyzed, and the integrated training system form and organizational structure of equipment command headquarters, military equipment, support units are defined. From four levels of training resources layer, simulation middleware layer, simulation function layer, simulation application layer, the technical architecture of STESITSS based on JLVC is constructed. As a result, the method guidance and the technical support of STESITSS detailed design and environment construction are provided by deliberating organizational structure and architecture.关键词:联合LVC仿真;装备保障;集成训练;体系结构设计Key words: JLVC simulation;equipment support;integrated training;architecture design中图分类号:TP311.52; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文獻标识码:A; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文章编号:1006-4311(2020)22-0199-040; 引言近年来,利用建模仿真技术与实兵实装训练相结合的LVC(L-Live Simulation-实况仿真/实兵训练,V-Virtual Simulation-虚拟仿真/虚拟模拟,C-Constructive Simulation-构造仿真/推演模拟)方法,依托网络通信环境和指挥信息系统组织部队开展综合集成训练,是发达国家军队提高军事训练质量效果和节约人力财力的一种有效途径[1]。
基于虚拟现实技术的船舶PSC检查训练仿真系统

基于虚拟现实技术的船舶PSC检查训练仿真系统
桑家军;任鸿翔;董雅欣;于建伟;周毅
【期刊名称】《船海工程》
【年(卷),期】2024(53)2
【摘要】针对现有PSCO培训效果差、风险和成本较高的问题,提出并开发了不受时间和场地限制的船舶PSC检查训练仿真系统。
以集装箱船为例,运用三维建模技术构建船舶主要区域和仪器设备的模型,使用OCR文字识别技术实现证书文件的有效信息提取,运用反向动力学技术实现虚拟船员在三维场景中的操作模拟,运用模糊综合评判法建立PSC检查训练的评估模型,实现对学员检查过程的评估。
仿真结果表明,所开发的系统场景沉浸感良好、满足PSC检查训练的需求,可用于PSCO的教学与培训。
【总页数】6页(P126-131)
【作者】桑家军;任鸿翔;董雅欣;于建伟;周毅
【作者单位】深圳海事局;大连海事大学航海学院;中海油能源发展股份有限公司采油服务分公司
【正文语种】中文
【中图分类】U675.79;TP391.9
【相关文献】
1.基于虚拟现实技术的船舶液压起货机仿真系统
2.基于分布式虚拟现实技术的船舶航行协同仿真系统研究
3.基于虚拟现实技术的LNG船舶仿真系统
4.基于虚拟现实技术的船舶轮机仿真系统
5.基于虚拟现实技术的船舶航行环境仿真系统
因版权原因,仅展示原文概要,查看原文内容请购买。
活动方案之仿真实训平台建设方案

活动方案之仿真实训平台建设方案1仿真实训平台建设方案【篇一:建筑工程仿真实训系统-建设方案】建筑工程仿真实训系统建设方案专业名称建筑工程学校名称 **学校编制人员**学校时间目录第一部分建设背景 .......................................................... ............................................................. .. 3一、行业背景 .......................................................... ............................................................. . (3)二、教育背景 .......................................................... ............................................................. . (3)第二部分建设意义 .......................................................... .. (4)一、学生层面 .......................................................... ............................................................. . (4)二、学校层面 .......................................................... ............................................................. . (5)三、社会层面 .......................................................... ............................................................. . (5)第三部分建设目标 .......................................................... .. (5)一、总体目标 .......................................................... ............................................................. . (5)二、具体目标 .......................................................... ............................................................. . (6)第四部分建设基础 .......................................................... .. (7)一、实践教学意识强 .......................................................... .. (7)第五部分建设思路 .......................................................... (7)一、利用技术优势,直击教学难点 .......................................................... .. (7)二、立足教学需求,提高教学深度 .......................................................... .. (8)第六部分建设内容 .......................................................... . (8)一、技术路线 .......................................................... ............................................................. . (8)二、功能细分 .......................................................... ............................................................. .. 10第七部分软硬件设计 .......................................................... . (12)一、设计原则 .......................................................... . (12)二、网络拓扑结构设计 .......................................................... (13)三、数据库和操作系统 .......................................................... .. (13)四、性能指标设计 .......................................................... . (13)第八部分系统安全方案 .......................................................... (14)一、安全体系结构 .......................................................... .. (14)二、安全管理 .......................................................... ............................................................. .. 14十、服务保障 .......................................................... ............................................................. . (16)第一部分建设背景一、行业背景建筑行业应用型人才需求建筑业的高速发展,急需大批高素质、高质量而且能够适应建筑市场的技术型人才。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿真训练系统
—流程级先进化工仿真实训装置
一、 背景
1987 年北京化工大学仿真中心研究开发成功我国第一套计算机化工仿真培训系统。在化工、石化、
炼油企业、职业技术学校、大专院校广泛应用,取得了重大的社会经济效益。
随着我国化工、石油化工和炼油企业的发展,装置不断大型化、复杂化,自动化水平普遍提高,对
职业技术培训提出了新的更高的要求。第一,将学生培养成合格的技术工人,满足现代企业的需要。由于
化工、石化和炼油企业多,装置种类繁杂,所以要求学生毕业后的适应性比较强。第二,和企业联合,结
合行业特色,建立中国一流的化工技术工人岗位培训基地,满足企业员工岗位再培训的需要。实训系统要
体现绿色环保、节能安全、现代技术、信息技术于一体,实现综合性技能培训与技能考核于一身。
为达到上面的目标,在培训的硬件设施上,希望建立典型的、有代表性的、有较强适应性的流程级、
规模化实训装置,特别是要求仿真培训系统不但能够模拟控制室内的计算机控制系统(DCS)的操作,还应
当模拟现场装置的实际动手操作。也就是要解决操作人员对现场装置的几何空间概念的把握和对操作设备
与部件的操作力度、动态时机的把握。其中还必须包括控制室操作人员与现场操作人员的团队配合及协调
行动。这些训练内容对于复杂系统的开停车、非正常工况的处理、尤其是在事故紧急状态时特别需要。
多年的计算机仿真培训经验表明,对于没有接触过化工装置现场的职业学校的学生,包括大专院校
的学生,仅仅采用显示屏画面、键盘和鼠标形式的训练,还是比较抽象,获得的知识还是片面的,不完全
的,尤其是缺乏团队协作能力。
为了解决以上难题,研制开发了新一代流程级化工仿真实训装置。
二、新一代流程级化工仿真实训装置
新一代流程级实训装置由小型流程装置、装置模拟监控系统、装置仿真软件、计算机控制系统(DCS)
仿真和实训评价与管理系统五部分组成。
1. 全流程装置
在金属框架上安装着由不锈钢制的比例缩小(但却能够保持工业级大尺寸特性)的流程设备模型、
管路、手动阀门、控制阀门、压力(P)、流量(F)、温度(T)、物位(L)、功率(N)、组成(A)和
阀位(V)测控传感器等。小型流程装置是学生直接操作和运行过程系统的环境。
本环境给学生以全真实的空间位置感觉、全真实的操作力度感觉和过程变化的时间特性感觉。由于真实
过程装置的压力、流量、温度、物位、功率、组成也是无法直接观察的,必须通过仪表检测,因此,本系
统和真实系统的观测界面完全一致。
2. 装置模拟测控系统
这是仿真装置无物料运行的关键部分,通过模拟测控系统,可以使仿真装置与仿真软件联合成一体,
是仿真软件与实物装置的“桥梁”。测控系统一方面需要把操作设备,例如阀门的转动变换为模拟电信号,
采用计算机控制技术将现场操作点的模拟信号实时采集,并传送到上位计算机的仿真模型中。另一方面需
要把仿真模型的运算结果通过转换变成模拟电信号,并传送到现场的各种仪表进行模拟与数字多种方式的
实时显示。所有此类功能全部采用先进的现场总线技术和实时监控技术加以解决。
3. 装置仿真软件
由于该装置是在“无物理化学过程”的状态下运行的,装置本身没有任何真实进出物料,所有化工
生产的工艺现象通过仿真软件模拟来实现。并将这些模拟参数送至仿真DCS(部分参数还需送至现场仪表
显示)。让受训者感受到的是一个完全“真实”的工业化工装置在运行中。
独立运行的仿真软件包括:工艺仿真软件、操作评分软件、运行管理软件、与DCS 的接口通讯软
件、教师指令台软件和仿DCS 软件。能否采用半实物仿真技术进行动态地操作实训,动态数学模型是关键。
为了高逼真地进行过程的开、停车、正常运行、故障状态操作及控制,必须解决如下建模问题:动态模型
应能反映被仿真装置的实际尺寸,包括设备尺寸、管道尺寸、阀门尺寸等,应能反映系统物料和能量的变
化与传递的定量关系;动态模型应能反映被仿真系统的物理化学变化的规律,如反应动力学特性、气液平
衡特性、流体力学特性等,这些特性常常是非线性的。动态模型应能反映被仿真系统的动态时间常数、惯
性、时间滞后、多容高阶特性;动态模型的求解速度应达到实时要求、求解精度应满足实验要求。
4. 计算机控制系统(DCS)仿真
可以选择使用化工常用典型的 DCS 仿真系统,用于本装置的控制与操作。仿DCS 类型包括
TDC-TPS、CS-3000、I/AAP70 系统,每种4 个DCS 仿真键盘。仿真 DCS 系统操作站包括:4 台操作站(有
工业键盘)。包括:4 台19 寸液晶PC,12 块工业DCS 键盘,及3 种类型仿DCS 软件。外加一个辅助操
作台进行事故报警及连锁系统监控。
DCS 仿真软件用于管理、调度仿DCS 操作软件各部分,实现动态实时数据库、各类标准画面、键
盘操作、各种算法,以及通信的协调配合,完成DCS 操作站的显示、操作等各种功能。
装置模拟测控系统的结构示意图见下图所示:
仿 DCS 操作控制软件模拟了真实DCS 的以下画面功能:
**菜单画面 **流程图画面 **控制组画面 **报警画面 **细目画面
仿真 DCS 系统可以对控制方案、控制画面、流程图画面、趋势画面和报警画面进行软件组态。仿
DCS 操作站见下图所示。
5. 实训评价与管理系统
运行培训项目及事故设置软件,运行操作评价软件。主要满足培训的组织和管理问题。其中操作评
价软件具有特殊的功能,可以通过组态方式修改和编辑。当实训装置运行时,软件会自动记录、分析和评
价操作员的操作水平。这是国外同类软件所没有的重要功能。
流程级仿真实训装置总体结构示意图
以上五个部分通过小型实时数据库、实时数字通信协调运行,完成复杂的、
高逼真度的半实物模拟实训。五个部分采用以太网和现场总线方式互联,其中信
号采集部分采用了PCI数据采集卡,结合先进的工业过程控制设计,具有模块化、
标准化、通用化结构。系统可以方便地扩展或重新组合。系统具备软件诊断功能。
三、新一代流程级化工仿真实训装置特点
新一代流程级实训装置,通过将小型半实物流程装置、微机控制系统与
全数字仿真技术结合,实现了集多种教学和实训功能于一身、全工况可操作、真
实感强、一机多用、无须物料、没有产物和副产物、维修简单、节能、安全、环
保、投资省、见效快等理想实训系统的要求,是工业实训技术的一个新的飞跃。
本装置的特点如下:
1. 采用不锈钢精密制造的缩小型全流程设备、精致的设备框架系统、管路、手
动阀门、控制阀门、测控传感器系统等,具有实际装置的全部空间几何三维分布
实体概念;
2. 采用先进测控电子技术成果,现场总线和电子操作器等专有设备,所有操作
点都可以全量程手动或自动调整,具有真实的操作力度和动态响应;
3. 运用高精度仿真数学模型,可以不受约束地模拟实际装置物理化学特性,可
以全工况动态实时模拟装置的开车、停车、正常运行调控、紧急停车和事故处理;
4. 控制系统(DCS)采用仿真DCS,其要求和真实DCS 一致,并有工业键盘。能
够给受训者一个真实化工生产操作控制模式、方法与环境。
5. 具备运行培训项目软件、事故设置软件和运行操作评价软件。可以满足培训
的自动评价、组织、全工况记录和管理问题。
6. 所有动设备都处于空转低负荷运行状态,因此运行能耗很低,设备磨损小寿
命长;
7. 不需要任何物料,节省费用、时间和人力,没有腐蚀、污染和环境保护问题;
8. 危险工况和事故状态由仿真模型模拟,不存在任何爆炸燃烧危险;
9. 设备大多是不锈钢壳体,几乎没有维修工作量;
10. 可以通过计算机控制实施自动即开即停,工况冻结与继续,这是任何其它实
训装置所无法比拟的超级功能,也是最适合于实训的功能;
11. 占地面积小,一般适合于职业技术学校的标准型新一代流程级实训装置,控
制室占地约60 平米,装置现场占地约180 平米;
12. 结合本中心完成的国家高技术发展项目(863)“大型石化企业安全评估”
的智能化计算机自动危险与可操作性分析(HAZOP)技术, 新一代流程级实训装
置可以升级为操作安全为内容的实训系统,同时也是智能化自解释高级实训系
统。