基于矩阵式遗传算法的集装箱码头堆场空间资源分配优化策略
自动化立体仓库优化调度研究
自动化立体仓库优化调度研究一、综述随着科技的高速发展和全球市场竞争的加剧,物流行业在国民经济中的地位日益凸显。
自动化立体仓库(ASRS)作为现代物流系统的重要组成部分,通过采用先进的自动化设备和技术,实现了仓库的高效运作,降低成本并提高客户满意度。
随着需求的日益增长,如何进一步提高自动化立体仓库的调度效率,成为了亟待解决的问题。
本文将对自动化立体仓库的优化调度进行深入研究,探讨不同调度算法和策略在实际应用中的表现,为仓储行业的发展提供有益的参考。
现有调度算法研究:介绍目前常用的自动化立体仓库调度算法,如遗传算法、蚁群算法、模拟退火算法等;案例分析:结合具体企业或项目的实际情况,分析各种调度算法在实际中的应用效果;优化调度策略研究:提出改进自动化立体仓库调度的策略,如动态路径规划、负载均衡、智能推荐等;1. 自动化立体仓库的重要性随着现代工业的飞速发展,物料搬运领域正面临着前所未有的挑战和机遇。
在此背景下,自动化立体仓库应运而生,逐渐成为了物料搬运领域的研究焦点。
作为现代物流系统中重要组成部分,自动化立体仓库在企业的供应链和仓储管理中发挥着举足轻重的作用。
本文将对自动化立体仓库的重要性进行深入探讨。
自动化立体仓库具有较强的战略价值。
企业通过运用自动化立体仓库,可以在有限的空间内存储更多的产品,极大提高了空间利用率。
自动化立体仓库能够根据需求自动调整货物存储量,帮助企业合理安排生产计划和采购计划,从而降低生产成本并提高盈利能力。
在资源利用方面,自动化立体仓库具有很高的优势。
它采用先进的自动化设备和技术,实现了对货物的快速、准确、高效的搬运,减少了人力劳动成本。
自动化立体仓库还可以实现对货物的自动分类、堆垛、检索等功能,进一步提高仓库管理的效率和准确性。
自动化立体仓库有助于提升物流系统的整体效能。
通过引入自动化立体仓库,企业可以构建一个集信息化、智能化、高效性于一体的现代物流系统。
这一系统能够实时监控库存情况,实现信息的快速传递和处理,从而有效减少库存成本和运输成本。
集装箱码头堆场管理

出口装船的堆场运作
堆场计划中的卸货港与船舶的实际挂靠港并不是完全一致的。船公司在一个口岸开辟一条干线时,船上不但装有本航线上基本港的货物,还会装有其他航线上的货物,而这些货物将在几个中转港中转。这些货物在新港码头体现的卸货港为中转港代码。
这导致本港的卸货港代码太多,出口场位利用率和装船效率都很低。
轮胎龙门吊作业的堆垛规则 制订堆场堆跺基本规则的目的:保证集装箱堆场堆放安全,减少翻箱率。 箱区的高度与龙门吊的起吊高度的关系 堆4过5箱区、堆5过6箱区 安全要求 若是堆4过5的轮胎吊箱区,则第六排应堆2层高,第五排应堆3层高。 集装箱进场选位时,应充分考虑堆放的安全系数,一般要求相邻排孤立的层高差≤3
要解决这个问题,首先需要将大票或同一货主的进口重箱进行集中堆放。通过船方提供的进口舱单资料,计划员可以将大票或同一货主的进口集装箱设定为一个货物类别,并将同一类别的进口重箱集中堆放。将作业路和货物类别综合考虑,不但能保证卸船效率,还能减少后续的提箱时翻箱。
货物类别规则
进口卸船的堆场运作
进口规则合并
集装箱码头堆场内作业类型
进口箱发箱作业
卸船收箱作业
01
出口箱收箱作业
装船发箱作业
02
归位 并位 转位
其他作业
03
船上倍位规则 作业路是根据船上倍位划分的,而为了减少作业路冲突,不同的作业路的进口集装箱需要进行分隔堆放
一般计划员在安排进口重箱时采用的方法是混堆,只考虑卸船的效率而忽视提箱的效率,从而导致提箱时大量翻箱。
船舶配载未考虑出口箱在场分布情况
出口取箱翻箱分析
出口取箱翻箱分析
出口取箱翻箱分析
预配及在港数据预处理
堆场位置与船上位置相对应 如何将同一卸货港和箱型的箱子在两张表中的堆场位置和船上位置相对应是最关键的。以卸货港为HKHKG的箱子为例,先将堆场分布和船上分布的区域进行汇总,再通过连线将各区域连接,就可以得到堆场上箱子的分布与船舶配载相对应的关系,如图11所示。
基于遗传算法的第四方物流多任务优化问题
Logistics物流商论1522012年5月 基于遗传算法的第四方物流多任务优化问题成都职业技术学院 梁川 四川省通讯管理局 李岚 成都大学经管学院 王积慧摘 要:本文对第四方物流多任务问题,在利用熵权法建立信誉度综合评价模型的基础上,将配送优化问题转化成多重图,通过相应的点和弧线的限制构造出约束和目标函数,得到优化模型,并进一步通过遗传算法进行仿真,得到结果,对实际问题进行指导,从而给出第四方物流科学的运作方式。
关键词:第四方物流 熵权法 多重图 多任务路径优化中图分类号:F252.24 文献标识码:A 文章编号:1005-5800(2012)05(b)-152-02随着我国电子商务的迅猛发展,第三方物流内部的管理、信息化水平、网络化已无法适应市场需求,导致目前许多大型电子商务企业开始自建物流,提升企业的竞争力,但这需要足够大的资本作为支撑,发展第四方物流已成为市场趋势。
第四方物流是1998年美国埃森哲咨询公司率先提出的,是专门为第一方、第二方和第三方提供物流规划、咨询、物流信息系统、供应链管理等活动。
埃森哲公司在《战略供应链联盟》一书中定义:第四方物流供应商是一个供应链的集成商,它对公司内部和具有互补性的服务供应商所拥有的不同资源、能力和技术进行整合和管理,以提供一整套供应链解决方案[1]。
一个领先的第四方物流系统,通过拥有的信息技术、整合能力以及其他资源提供一套完整的供应链解决方案,以此获取一定的利润。
其中包括各第三方物流提供商的信誉、成本、储货、载货量等,并能决定最有效率的运输路线。
优化的方法有多种。
传统的直线式程序亦能解决部分问题,但当配送点的数目不断增多,路线及车队调动的复杂性将以倍数增加,优化路线的计算时间亦不断延长。
因此,第四方物流服务供货商必需具备一智能化的高效、快速的选择系统,能够根据第三方物流提供商的具体情况,实时为客户决定最优化的配备方案。
陈建清、刘文煌和李秀在文[2]中提出了基于Dijkstra 算法解决第四方物流中单点到单点的路径问题的方法。
【国家自然科学基金】_岸桥_基金支持热词逐年推荐_【万方软件创新助手】_20140802
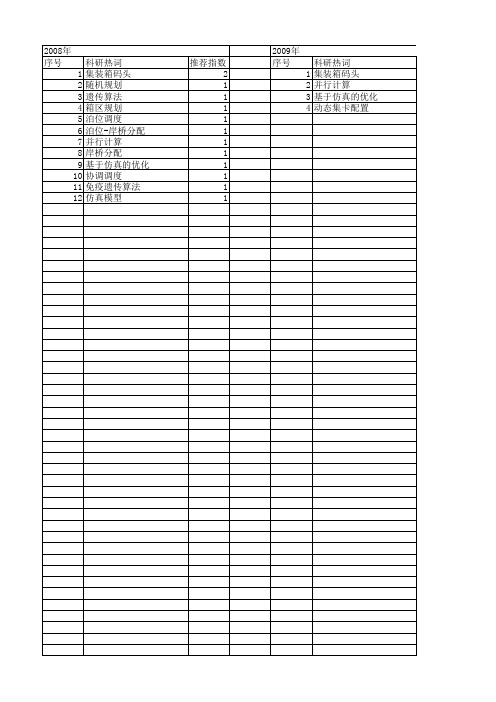
科研热词 集装箱码头 随机规划 遗传算法 箱区规划 泊位调度 泊位-岸桥分配 并行计算 岸桥分配 基于仿真的优化 协调调度 免疫遗传算法 仿真模型
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4
科研热词 集装箱码头 并行计算 基于仿真的优化 动态集卡配置
推荐指数 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11
科研热词 集装箱码头 集装箱装卸系统 集成调度 集卡 遗传算法 路径优化 调度 物流工程 混合装卸 启发式算法 ncl建模
推荐指数 2 1 1 1 1 1 1 1 1 1 1
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
推荐指数 12 7 5 4 4 3 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
集装箱码头AGV调度优化

集装箱码头AGV调度优化柯冉绚;任亚东【摘要】为了解决集装箱码头自动导航车AGV (Automatic Guided Vehide)调度优化问题,建立以无效最短时间为原则的数学模型,采用Netlogo软件模拟仿真,比较了“作业线”和“作业面”两种调度模式,验证所建立数学模型的合理性以及“作业面”调度模式的优越性.在验证实验模型的基础上进行了仿真实验的应用,通过假设,以运载900 TEU为例,设置车道数为2车道和3车道,以及岸桥与AGV的配比为1∶4,1∶5,1∶6时,对比分析不同模拟环境下AGV的等待率,实验结果是当车道数为3以及岸桥与AGV的配比为1∶6时,AGV的等待率为3.71%,为6种模拟情况中的最佳AGV和岸桥配置方式.该结果能够在一定程度上对自动化集装箱码头的调度作业提供参考和借鉴,提高自动化集装箱码头的作业流畅性,更好配合越来越大型化的集装箱船装卸作业,提升码头的作业效率和信息化水平,实施有效的作业管理.【期刊名称】《集美大学学报(自然科学版)》【年(卷),期】2016(021)001【总页数】7页(P35-41)【关键词】AGV;作业面;Netlogo;模拟仿真【作者】柯冉绚;任亚东【作者单位】集美大学航海学院,福建厦门361021;集美大学航海学院,福建厦门361021【正文语种】中文【中图分类】U691+.31自动导航车AGV(Automatic Guided Vehide)具有自动化、智能化、并行作业的特点,能够很好的满足集装箱码头的水平运输要求,AGV的合理调度和配置一直是专家学者重点研究的方向,合理的调度模式可以提高AGV的利用率,减少空驶时间,提升重载率.目前对集装箱码头的研究主要为集卡的调度问题,文献[1]探讨了进口集装箱装载和卸载操作时集卡的最优路径问题,同时还研究了集卡最优路径求解问题和进口集装箱在堆场上的箱位安排问题,并且运用启发式算法求解和分析了所建立的模型;文献[2]分析了集卡的静态调度模型和动态调度模型的优缺点,并且建立了集卡路径动态优化数学模型;文献[3]从集卡在码头前沿作业时出现的排队等待作业现象造成了集卡资源浪费这个角度进行研究,利用排队论的思想建立数学模型,并且利用所建立的数学模型进行了仿真模拟;文献[4-5]针对调度方式进行了研究,并且建立数学模型,使用优化算法进行求解.国内外对于集装箱码头集卡或AGV调度问题的研究,主要设置以下几种目标函数:1)行驶距离最短;2)总作业时间最短;3)运营成本最低;4)配置数量最少.基于此,本文采用数学建模和仿真模拟的方法去研究AGV的调度,以使其达到缩短空驶时间,提高重载率的目标.通过分析“作业线”和“作业面”两种调度模式的优缺点,并且以无效作业时间最短为原则建立数学模型.基于Netlogo系统平台构建仿真模拟,通过运行仿真实验来验证“作业面”调度模型的优越性和所建数学模型的合理性.应用仿真实验进行实例分析,可以为集装箱码头实际调度作业提供参考[6].1.1 “作业线”调度模式在集装箱码头中,AGV主要服务于岸桥与堆场、堆场与堆场之间水平运输集装箱,通常采用“作业线”的调度模式,即在集装箱装载或卸载过程中,某一个AGV固定的为某一个岸桥服务,或者说一个岸桥由固定的几台AGV提供服务,直至所有的任务完成,才能重新分配新的任务为其他的岸桥服务.调度模式如图1所示.其特点为:1)调度方式简单,每组AGV的作业路线固定,便于生产管理.2)在现场实时调度作业时,不仅对作业变化的敏感性弱,导致调整滞后缓慢,缺乏灵活性,而且浪费人力和物力;3)从AGV的装载效率上来看,其重载率为50%,在提倡“双重效用”的趋势下,不能够提高AGV的利用率[7].1.2 “作业面”调度模式针对“作业线”调度模式的弊端,不少学者在不断地钻研集装箱码头的调度生产,基于“作业面”的AGV调度模式被提出来.此种调度模式从整体作业过程出发,兼具系统工程的思想,AGV不再单独的固定服务于某一台岸桥,也不局限于单一路线,而是动态地服务在多条任务线上,不同的装卸船舶,不同的岸桥、龙门起重机,AGV实现了整体协同作业,很大程度上缩短了AGV的空驶时间和距离,调度模式如图2所示.其特点为:1)AGV的空驶距离大缩短,有效缩短集装箱船舶在港装卸时间和等待时间;2)AGV被充分地利用到不同的作业线上运输集装箱,实现了双向重载行驶,提高AGV的利用率.在建立模型之前对时间参数进行定义:m为进口箱区的数量;n为出口箱区的数量;k为进口泊位的数量;l为出口泊位的数量;Ci为计划在进口箱区i堆存的进口集装箱数量;Dj为计划在出口箱区j出口的出口集装箱数量;Ba为通过进口泊位a进口的进口集装箱数量;Hb为通过出口泊位b出口的出口集装箱数量.AGV在每个阶段所使用的时间以“t”表示,标注在作业流程图上,如图3所示.决策变量:Xaijb为AGV在一条“作业面”路径上的行走次数,即在:进口泊位a→进口箱区i→出口箱区j→出口泊位b的行走次数;Yai为AGV单独运输进口箱的行走次数,即在路径,进口泊位a→进口箱区i→进口泊位a的AGV行走次数;Zjb为AGV单独运输出口集装箱的行走次数,即在路径,出口泊位b→出口箱区j→出口泊位b的AGV行走次数.本文求解的目标是:在“作业面”和“作业线”作业模式下,考虑岸桥和堆场龙门吊的作业时间,规划AGV的运输路线,基于无效作业时间最短的运输方式,建立如下数学模型.基于“作业面”调度模式下的求解最短无效作业时间F1为:其中:AGV在“作业面”调度模式下的平均等待时间Tw=ta+bb+ti+tj;AGV在“作业面”调度模式下的空载行驶时间Tu=tab+tij或Tu=tba+tji.基于“作业线”调度模式下求解的最短无效作业时间F2:约束条件为:Xaijb,Yai,Zjb∈Z.计划堆存在进口箱区i的集装箱必须全部由AGV从进口泊位运输到进口箱区计划从出口箱区j出口的集装箱必须全部由出口箱区j运输到出口泊位计划从进口泊位a进口的集装箱必须全部由AGV从进口泊位运输到进口箱区计划从出口泊位b出口的集装箱必须全部由AGV从出口箱区运输到出口泊位b[8] 本文基于Netlogo平台对AGV调度模式进行仿真模拟,并将所建立模型的数学思想运用到仿真模拟中,进而建立实验模型.3.1 仿真实验一下面从基于无效作业时间最短对“作业线”和“作业面”调度模式运行仿真模拟,此实验是针对在初始条件一致的情况下,比较两种调度模式的优劣程度.在本实验中设置的试验参数如表1所示:3.1.1 基于“作业线”的模拟过程1)在模拟界面上,根据表1的变量取值设置参数.2)记录模拟中导出的数据和图形,如图4、图5所示.图4为基于“作业线”调度方式AGV的平均等待时间,图5为等待时间之和.3.1.2 基于“作业面”的模拟过程1)为了与“作业线”调度作业进行比较,其设计参数也是按照表1的变量参数进行设置,把change?按钮调整为on状态,形成“作业面”调度的参数设置. 2)记录模拟中导出的数据和图形如图6、图7所示.图6所示为基于“作业面”调度方式AGV的平均等待时间,图7所示为等待时间之和.3.1.3 结果分析通过分析比较图5和图7可知,在相同的作业时间内,基于“作业线”调度模式的等时间之和为2280(ticks),而基于“作业面”的等待时间时间之和为1520(ticks),从而得知基于“作业面”调度模式要比基于“作业线”调度模式的作业等待时间少760(ticks),生产作业效率提高了33.3%.在集装箱码头设备数量一定的情况下,基于“作业面”调度模式能够使生产效率得到很大程度的提高,由此可以验证这种调度模型是合理并且可行的.3.2 仿真实验二为了更好地求解基于“作业面”调度模式,以无效作业时间最短为原则建立的数学模型,应用一个具体的实例进行求解.已知实例的具体要求如下:1)某集装箱码头的海测岸线长为500 m,每隔70 m设置一个岸桥,共设置3个岸桥;2)某集装箱船舶靠泊装卸的集装箱的总数量为900 TEU,其中450个为装载集装箱,450个为卸载集装箱;3)每一岸桥配有5辆AGV为其服务;4)AGV的车身长为15 m,运行速度为5 m/s;5)岸桥和龙门吊的装卸效率为30 move/h;6)在码头前沿的模拟界面上设置两个车道,其中第1车道AGV数量为8台,第2车道AGV数量为7台;7)在等待岸桥作业时,两个车道的AGV具有不同时等待同一岸桥的交通优先设置.根据上述条件,可以设置变量的参数,如表2所示.记录模拟中导出的数据和图形,如图8、图9所示.由图8、图9得知,所构建的“作业面”调度模式下的数学模型的目标函数能够很快收敛,得到AGV最短的等待时间.由模拟实验导出收敛值为1.25(ticks),这样就保证了整体作业时间最短,各辆AGV能够顺利完成任务,提高集装箱码头的工作效率.3.3 实验模型的应用基于实验平台,在模拟场景中设置不同的车道数,以及不同的岸桥与AGV的配比,在运载相同数量的集装箱情况下来研究AGV的等待率,可以为实际的调度生产提供决策支持.表4为2车道设置的初始参数,表4为3车道设置的初始参数.3.4 实验结果分析在做完2车道和3车道的对比实验以后,将实验结果汇总,并且进行分析,如表5所示.对表6的数据进行分析:1)当模拟界面内设置2车道时,通过仿真模拟的运行,可以得出当AGV与岸桥的配比为1∶4时,AGV的等待率最小为4.3%,但是等待时间和总运行时间要高于其他两种配比.综合考虑,当岸桥与AGV配比为1∶6时,总运行时间和等待时间最短,等待率为4.51%,在合理的范围之内.2)当模拟界面内配置3车道时,等待时间、总运行时间以及等待率随AGV与岸桥的配比的增加而减少,这说明AGV的调度作业效率逐渐提高.当AGV与岸桥的配比为1∶6时,AGV的等待率最低为3.71%.3)对比2车道和3车道的整体效率时,可以得出3车道的等待率要比2车道的等待率普遍都有降低,降低的比率为4.65%~17.7%.总运行时间方面,3车道要比2车道的运行时间略短,这是因为增加了一个车道,使得3车道的AGV速度比2车道的快,AGV的等待率降低,使得整体作业效率提高.4)在2车道模拟情况中,当岸桥与AGV配比为1∶5时的等待率比配比为1∶6时的等待率高,这是由于系统仿真模拟执行时,数据输出具有波动性,但是整体会收敛于某一稳定的值.5)在2车道的实验分析中,发现当岸桥与AGV的配比为1∶4时的等待率小于其他两种配比情况,这是因为在2车道中,每个车道分配的AGV数量少于其他两种配比的情况,自然每辆AGV的加速度会增加,使得等待率降低.6)在实际调度生产中,从等待效率方面考虑,可以选择3车道和岸桥与AGV的配比为1∶6的情况作为决策支持.以集装箱码头的AGV调度为研究对象,合理考虑AGV的调度模式,借鉴前人所建立的数学模型,进行改进规划,规划后的模型为基于无效作业时间最短的数学模型,采用Netlogo软件进行仿真模拟和实例求解,通过仿真应用,为AGV的调度决策提供一定的参考依据.本文中仿真分析只针对等待率方面去考虑AGV的调度,为了更全面的研究集装箱码头AGV调度,下一步可以将集装箱码头的等待效率与集装箱码头的运行成本相结合,用以分析集装箱码头的作业效率.在对研究集装箱码头的AGV调度方法上,使用具有仿真模拟功能的Netlogo软件,为AGV的调度研究提供一种可行的方法支持.将来在研究集装箱码头的AGV 调度时,可以适当的增加变量,不断丰富仿真模拟的内容,让仿真界面的设置更贴近现实,适当增加数据输出框,可以更全面、更准确的去研究调度问题.集装箱码头的资源配置,包括硬件设备的资源配置,与码头的生产效率密切相关.通过研究岸桥和AGV的配比,模拟不同情况下的作业时间和等待时间,得出比较适合的配比,从而达到集装箱码头的资源配置优化,在保障生产效率的情况下,提高码头的效益.本研究在集装箱码头运营方面,具有实践意义.【相关文献】[1]MARTIN GRUNOW.Hans-Otto Günther,Matthias Lehmann.Strategies for dispatching AGVs at automated seaport container terminals.OR Spectrum,2006,28(4):587-610.DOI:10.1007/S00291-006-0054-3.[2]ETSUKO NISHIMURA,Akio Imai,Stratos Papadimitriou.Yard trailer routing at a maritime container terminal.Transportation Research Part E,2005,41(1):53-76.[3]赵悦琼,EVANG ELOS KAISAK.集装箱码头集卡的一种调度模型与仿真.物流工程管理,2014(9):108-109.[4]陈方鼎.基于群体智能算法的集装箱码头集卡调度研究.大连:大连海事大学,2008.[5]徐远琴,韩晓龙.集装箱码头集卡动态调度模型优化.武汉理工大学学报(信息与管理工程版),2013(3):358-360.[6]任亚东.集装箱码头AGV调度研究.厦门:集美大学,2014.[7]康志敏,吴洪明.港口集装箱码头集卡优化调度研究.物流工程与管理,2011,33(2):59-61.[8]王军,许晓雷.集装箱码头集卡作业的路径选择.大连海事大学学报,2011,37(2):25-27.。
集装箱码头堆场拥堵原因探索及对策建议
第19卷 第4期 中 国 水 运 Vol.19 No.4 2019年 4月 China Water Transport April 2019收稿日期:2018-12-01作者简介:王伟彬(1992-),男,河南商丘人,大连海事大学硕士生,研究方向为港航物流。
集装箱码头堆场拥堵原因探索及对策建议王伟彬(大连海事大学 交通运输工程学院,辽宁 大连 116026)摘 要:本文探讨了导致集装箱码头堆场拥堵的几个原因,包括集装箱船舶大型化、堆场装卸设备落后以及堆场箱区分配不合理等,并且有针对性地提出了一些对策和建议。
本文旨在缓解码头堆场拥堵,充分利用有限的堆场空间资源,从而提高码头堆场的作业效率和服务质量。
关键词:集装箱;堆场;拥堵;对策建议中图分类号:F251 文献标识码:A 文章编号:1006-7973(2019)04-0043-02一、引言集装箱码头堆场作为连接水路运输及陆路运输的重要节点,在全球经济贸易中发挥着越来越重要的作用。
随着集装箱码头前沿装卸设备的不断更新,比如双四十英尺岸桥的投入使用,码头前沿的作业能力显著提高,码头的运营瓶颈也将由码头前沿转向内陆堆场。
集装箱码头堆场拥堵是新的热点问题,它与港口拥堵问题略有不同,前者研究的范围较窄,更多的是专注于运营操作方面,如集装箱堆场位置分配;后者研究涉及的范围较广,更倾向于从宏观上把控,如国家政策。
但是,堆场拥堵不仅导致码头的作业效率降低,船舶停留时间增加,还会造成堆场碳排量的增多,严重污染环境。
因此,如何降低堆场拥堵,提高码头的运营效率,需要引起码头管理人员足够的重视。
二、造成堆场拥堵的原因 1.集装箱船舶大型化伴随经济贸易全球化的发展,集装箱运输需求日益增长,促使集装箱船舶朝着大型化的方向不断迈进。
目前,集装箱船船型已经发展至第六代,运载能力是最初船型的七倍,投入使用的最大运力的集装箱船舶可装载2.2万TEU [1]。
而越来越多的大型船舶投入使用,也给码头带来了重大的考验,因为船舶靠港后,短时间内,大量的集装箱需要从码头前沿通过集卡运输到堆场中,给堆场造成很大的压力。
集装箱码头泊位—岸桥分配耦合优化
集装箱码头泊位—岸桥分配耦合优化杨春霞;王诺;杨华龙【摘要】针对现有泊位、岸桥分配优化方法因未考虑二者耦合关系引发的资源浪费或作业冲突等问题,以船舶作业时间为耦合变量,建立了基于泊位分配子模型和岸桥分配子模型的耦合模型,优化目标为最小化船舶在港时间和岸桥移动次数。
提出了一种嵌套循环进化算法进行求解,其中,两个内循环分别用于求解泊位分配和岸桥分配子模型,外循环通过两个内循环的相互作用和反馈来寻找满意解。
通过试验算例验证了所提耦合优化方法的有效性。
%Existing optimized approaches for berth allocation and quay crane assignment problems didn't consider resource wastes or conflicts in operations caused by their coupling relationships.To solve this problem,by using ship handling time as coupling variables,a coupled model was established based on the berth allocation sub-model and the quay crane assignment sub-model.The objective of the coupled model was to minimize the waiting time of ships and the transfer number of quay cranes.An evolutionary algorithm with nested loops was presented.Two internal loops were used to solve the berth allocation sub-problem and the quay crane assignment sub-problem respectively.And with the interaction and feedback between the two loops,an external loop was adopted to find the satisfactory solution.The computational experiments were given to verify the effectiveness of the presented coupled approach.【期刊名称】《计算机集成制造系统》【年(卷),期】2011(017)010【总页数】8页(P2270-2277)【关键词】耦合优化;泊位分配;岸桥分配;嵌套循环;集装箱码头【作者】杨春霞;王诺;杨华龙【作者单位】太原科技大学交通与物流学院,山西太原030024;大连海事大学交通运输管理学院,辽宁大连116026;大连海事大学交通运输管理学院,辽宁大连116026【正文语种】中文【中图分类】TP39;U169.6泊位、岸桥是多用户集装箱码头的紧缺资源,泊位分配问题(Berth A llocation Problem,BAP)和岸桥分配问题(Quay Crane A ssignment Prob lem,QCAP)一直是集装箱码头生产组织优化领域的基础问题和热点问题[1-3]。
集装箱自动化码头AGV路径优化和调度研究的开题报告
集装箱自动化码头AGV路径优化和调度研究的开题报告一、选题背景及研究意义近年来,随着全球贸易的不断发展和提高集装箱码头的运营效率的要求,自动化技术在集装箱码头中应用越来越广泛,自动化码头系统也越来越复杂。
自动引导车(AGV)作为自动化码头系统的重要组成部分之一,广泛应用于集装箱码头中。
在集装箱码头作业中,AGV需要完成集装箱的自动化运输和堆垛等工作,因此,路径优化和调度是AGV自动化运输系统中的重要问题。
AGV路径优化可以提高码头运营效率,减少AGV的等待时间和路程,降低码头物流成本,同时还能降低AGV运行过程中的能耗和排放。
因此,AGV路径优化和调度问题的研究对加强集装箱码头运营效率、优化码头资源配置具有重要的现实意义和研究价值。
二、研究对象及研究内容本研究的研究对象是集装箱自动化码头中的AGV。
针对AGV路径优化和调度问题,本研究将分别从以下三个方面展开:(1)AGV路径规划模型的建立:建立以码头AGV自动化运输系统为基础的AGV路径规划模型,从路径规划算法的角度研究路径优化问题,包括基于遗传算法、模拟退火算法等优化算法的应用。
(2)AGV调度模型的建立:建立以生产排程为基础的AGV调度模型,研究AGV调度算法,包括动态调度和静态调度两种方式的方案设计,并对比分析两种调度方式的优缺点。
(3)AGV路径规划和调度优化策略的研究:基于建立的路径规划和调度模型,分析不同策略下的运营效率,比较不同策略的优缺点,提出优化方案。
三、研究方法与技术路线(1)相关理论调研:对AGV自动化运输系统、路径规划和调度算法等相关理论进行调研和分析,整理前人研究成果。
(2)建立AGV路径规划模型:基于路径规划算法的原理,建立AGV路径规划模型,分析路径规划的关键问题。
(3)建立AGV调度模型:查询码头生产排程信息,建立调度模型,研究调度算法,设计动态调度和静态调度方案。
(4)AGV路径规划和调度优化策略:根据前期研究成果,设计不同的优化策略,比较各种策略的优缺点,提出适用于集装箱自动化码头的路径规划和调度方案。
集装箱码头堆场翻箱与外集卡提箱顺序同步优化方法
集装箱码头堆场翻箱与外集卡提箱顺序同步优化方法冯媛君;曾庆成;李厚源;杨忠振【摘要】During the operation of retrieving containers in container terminals,the retrieving sequence of inbound containers is not matched with the location of the target containers,which results in huge amounts of rehandling.In order to address this problem,an integrated optimizing model of rehandling and retrieving sequence for inbound containers is developed to optimize the retrieving sequence,yard crane assignment and rehandling scheme.The objective is to minimize the operation cost of container terminals and the lateness cost of external trucks.To solve the model,a dynamic programing-based heuristic is designed.Numerical experiments are provided to illustrate the validity of the proposed model and algorithms.The results indicate that the integrated optimizing of retrieving sequence,rehandling scheme and yard crane assignment can decrease the rehandling ratio and the moving cost of yard cranes,and thus can save the total cost of retrieving operation.%针对集装箱码头提箱作业过程中,由于外集卡的提箱顺序与目标箱在堆场的堆存位置不匹配导致大量翻箱这一难题,以码头的作业成本和外集卡的延误成本之和最小为目标,建立堆场翻箱与外集卡提箱顺序同步优化模型,优化外集卡的提箱顺序、龙门吊的任务分配以及翻箱方案.设计基于动态规划的启发式算法求解模型,并利用算例对模型与算法的有效性进行了验证.结果表明:与目前码头普遍采用的提箱方式相比,通过调整外集卡提箱顺序并同时优化翻箱方案以及龙门吊的任务分配可以降低堆场翻箱率,减少龙门吊的移动成本,从而节省提箱作业的总成本.【期刊名称】《运筹与管理》【年(卷),期】2017(026)005【总页数】9页(P110-118)【关键词】物流工程;码头翻箱方法;优化算法;集装箱码头【作者】冯媛君;曾庆成;李厚源;杨忠振【作者单位】大连海事大学交通运输管理学院,辽宁大连116026;大连海事大学交通运输管理学院,辽宁大连116026;大连海事大学交通运输管理学院,辽宁大连116026;大连海事大学交通运输管理学院,辽宁大连116026【正文语种】中文【中图分类】U691进口箱的提箱作业是集装箱码头堆场的主要作业环节之一。
【国家自然科学基金】_集卡_基金支持热词逐年推荐_【万方软件创新助手】_20140803
2011年 科研热词 推荐指数 集装箱码头 2 集装箱码头闸口 1 集卡调度 1 闸口通过能力 1 鉴权协议 1 证据保全 1 水路运输 1 排队论 1 手机支付 1 强化学习 1 小脑模型关节控制器 1 对称密码算法 1 外部集卡 1 双哈希链 1 仿真ห้องสมุดไป่ตู้1 q学习 1 m/g/s/∞/∞/fcfs排队系统 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11
科研热词 集装箱码头 集卡 集装箱港口 集成调度模型 路径优化 调度 神经网络 混合优化算法 模拟退火 多agent系统 ncl建模
推荐指数 2 2 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
2014年 科研热词 集装箱码头 库存管理 库存成因 库存对策 库存优化 制造企业 粒子群算法 混沌理论 泊位-岸桥分配 多目标优化 云模型 集卡路径 集卡调度 随机入港 视景仿真系统 装卸作业 约束规划 港口物流工程 混合装卸作业 混合整数规划 泊位分配 水路运输 最优化 智能交通 数据挖掘 岸边集装箱起重机 岸桥调度 场景驱动 启发式算法 协调调度 协同计划 出行链 公交ic卡 下车站点 vega od估计 np-hard问题 chc算法 推荐指数 4 3 3 3 3 3 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71
排队网络 成本优化 岸桥调度 场桥 启发式算法 同步调度 变领域策略 卟啉 协作优化 动态优化 出口箱 共享模式 供应链 作业量平衡 优化模型 企业 仿真模型 互拖 rfid
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M— A; h f e cso d frn g nt t tg so h e omac f e e cAgrh ( A)ae G tei u ne f iee t e e cs a i n tep r r n eo G n t loi m G n l f i re e f i t r
第3 3卷 第 2期 21 02年 6月
.
上
... .. .. ... . ...
. . . . . .
海
. . . . . . . — —
— — — —
海
. . . . . . . . .
— — — — — — — — —
事 大
学 学
报
Vo . 3 No 2 13 .
o a h J u rn 1ofS a n g a aii i e st h iM rtme Un v riy
mi ‘ —i h r n p rain d sa c t e h tr g l c s a d t e s lbe n mi ng t e ta s o tto itn e bewe n t e so a e b o k n he v s e  ̄hs nd t e fc o s ’i z ,a h a tr s h a ua r n n a d c a e a e tke n o a c u t uc sq y ca e a d y r r n r a n i t c o n .Th tr g p c lo ai n mo e s d o e so a e s a e alc to d lba e n q y c a e o e ai g ln s i u l irt ua r n p rtn i e s b it sl f y;t e t e x e d d v r in o he S h n h e tn e e so f t S AP s e ov d y h i r s le b t e
A s at T ov h t aeS aeA l a o rbe ( S P , not i t ns a g r h t — b t c : osl teSo g p c l ct nPo l r e r o i m S A ) a pi z i t t yf es r m ao r e o t o aesaea oa o rp sdb sd o eMa i G nt l rh ( G .T es a g i sa g p c l ct ni po oe ae nt tx e e cA gi m M—A) h t ty am t l i s h r i ot re
G in i LAN h nj U Tay , I G C egi
( cdmyo Sine& T cnlg , h nhi aimeU i. S aga 2 10 , h a A a e f c c e eh o y S aga M ri n , h nhi 03 6 C i ) o t v n
grh M— A) oi m, G 的集 装箱码 头堆 场空 间资 源 分配 优化 策略 . 方 法首 先 建立 基 于装 卸 作 业面 的 堆 t 该
场 空间资 源分 配模 型 ; 然后 运 用 M—A 求解 扩展 后 的 S A ; G S P 最后 分析 不 同遗 传 策略 对遗 传 算 法
( e e cA grh G ) 能的影 响 , G nt l i m, A 性 i ot 并以上 海张华 浜码 头的案 例验证 该 方法 的优越性 .
关键 词 :集装 箱码 头 ; 岸桥 ; 场 空 间资源配 置 ; 传 算法 ;矩 阵式编码 堆 遗
中图分 类号 : 6 3 7 6 6 1 5 T 13 U 5 . ;U 5 . 3 ; P 8 文献标 志码 : A
An o tm i a i n sr t g o t r g p c l c to n c n a n r p i z to t a e y f r s o a e s a e a l a i n i o t i e o t r i a a e n m a rx g n tc a g r t m e m n lb s d o t i e e i l o ih
a ay e nal T e a e o h n h iZh ng u b n n an r T r na e i e h u e o i ft e n lz d f l i y. h c s fS a g a a h a a g Co t ie e mi lv rf s t e s p r rt o h i i y
J n 01 u .2 2
文 章 编 号 :6 2—9 9 (0 2 0 —00 0 17 的集 装 箱 码 头 堆 场 空 间资 源分 配 优 化 策 略
顾 天 意 ,梁承 姬
( 海海事大学 科 学研 究院,上海 上 2 10 ) 0 36
摘
要 : 解决堆 场 空间资 源配置 问题 ( trg pc l c t nPolm, S P , 箱 区到 泊位 运 为 SoaeS aeAl a o rbe S A ) 以 o i
输距 离最 小为 目标 , 合考虑 岸桥 、 综 场桥 等 因素 , 出一种基 于矩 阵 式遗 传 算 法 ( txG n t 1 提 Ma i e e cA . r i
p o o e eh d rp sd m to .
Ke r y wo ds:c n ane e i a ;q a r n o t i r tr n l u y c a e;so a e s c l c to m tr g pa e al a in;g n tc ag rt m ;marx b s d o e ei l o h i ti — a e