第八章 输入、输出
合集下载
第八章 系统的状态空间分析

x 2(k +1) y 1(k )
x1 (k + 1) = a1 x1 (k ) + a2 x2 (k ) + f1 (k ) x2 (k + 1) = a4 x2 (k ) + f1 (k ) + f 2 (k )
在系统的输出端得到输出方程: 在系统的输出端得到输出方程: 输出方程
f2(k )
x(t0 )已知
统称为状态空间方程 统称为状态空间方程
8.1 状态空间描述
离散系统: 离散系统:
设 n 阶 LTI 离 散 系 统 , 它 具 有 p 个 输 入 f1(k), f2(k), … , fp(k); q 个 输 出 y1(k),y2(k), …, yq(k)。记系统的 个状态变量为 1(k), x2(k),…,xn(k), 则其状态 个状态变量为x 则其状态 。记系统的n个状态变量为 , , 是关于状态变量的一阶差分方程组, 是关于输入、 方程是关于状态变量的一阶差分方程组 输出方程是关于输入 方程是关于状态变量的一阶差分方程组,输出方程是关于输入、输出和状态 变量的代数方程组。 变量的代数方程组。两组方程的标准形式可写为
t
−∞
t0
= x(t0 ) + ∫ m(τ )dτ
t0
t
等号两边对时间t求导: 等号两边对时间 求导: 求导 x(t ) = m(t )
•
x(t0)已知 已知
鉴于记忆元件的“ 出过程, 鉴于记忆元件的 “ 拉 ” 出过程 , 并没有改变系统内部各部分间的 连接关系, 连接关系 ,因此可以用记忆元件和无记忆部分的输入输出关系来表征 原系统的特性, 原系统的特性,即
8.2 系统状态空间方程的建立
8.2.1 直接由电路列写法
C语言 第八章
p
printf(“%d,%d\n”,a,b); printf(“%d,%d\n”,*p1,*p2);}
三、指针变量作为函数参数 作用:将一个变量的地址传送到另一个函数中。 作用:将一个变量的地址传送到另一个函数中。 例1:编写实现两个数的交换的函数 : swap(int *p1, int *p2) *p2) void swap(int *p1, int swap(int x,int y) {{ int temp; 定义为*temp? ? int temp; 定义为 { int temp; temp=*p1; temp=x; temp=*p1; *p1=*p2; x=y; *p1=*p2; y=temp; } *p2=temp; } *p2=temp; } main() main() main() { int a,b,*p1,*p2; { int a,b; { int a,b p1=&a;p2=&b; scanf("%d,%d",&a,&b); scanf(“%d%d”,&a,&b); scanf(“%d%d”,p1,p2); swap(a,b); swap(&a,&b); swap(p1,p2); printf("\n%d,%d\n",a,b); printf("%d, %d\n",a,b); printf("%d, %d\n",a,b); }} }
个字节的问题) 个字节的问题)
二、指针变量的引用 “&”(地址运算符 取变量的存储地址。如:&a求变量 的地址。 地址运算符) 取变量的存储地址。 地址运算符 求变量a的地址 求变量 的地址。 “*” (引用运算符 取指针所指向变量的内容。&与*优先级相同, 引用运算符) 取指针所指向变量的内容。 与 优先级相同 引用运算符 优先级相同, 但按自右至左的结合方向。 但按自右至左的结合方向。 例如: 例如:int i=3,*p; p=&i;
第八章声卡、音箱和网卡
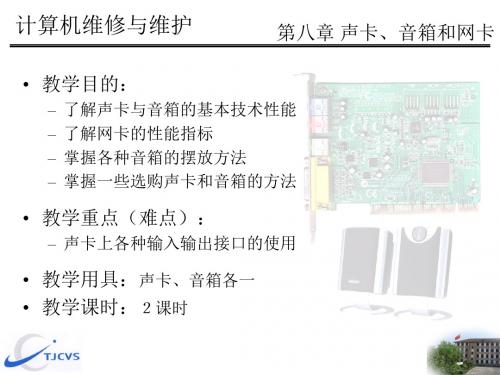
目前常见到的声卡大致可以分成两类:采用扩展卡式的普 通声卡与集成在主板8.1.1 普通PCI声卡 • 普通PCI声卡结构
第八章 声卡和音箱
声卡输入/输出接口
8.1基础知识1:认识声卡
第八章 声卡和音箱
8.1基础知识1:认识声卡
集成声卡 为了降低声卡的成本,主板厂商们纷纷在主板上集成了音 效芯片,集成声卡又分成“集成软声卡”与“集成硬声卡”两 大类。
第八章 声卡和音箱
8.1.2 声卡技术指标
8.1基础知识1:认识声卡
7.波表合成方式及波表库容量 现在的PCI声卡则大量采用更加先进的DLS波表合成方式,其波表库 容量通常是2MB、4MB或8MB,而像SB Livel声卡甚至可以扩展到32MB。
第八章 声卡和音箱
8.1.2 声卡技术指标
8.1基础知识1:认识声卡
第八章 声卡和音箱
8.1.2 声卡技术指标
8.1基础知识1:认识声卡
4.复音数量 复音数量代表了声卡能够同时发出多少种声音。复音数越大, 音色就越好,播放MIDI 时可以听到的声部就越多、越细腻。目前声卡 的硬件复音数不超过128位,但其软件复音数量可以很大,有的甚至达 到1024位,不过都是以牺牲部分系统性能和工作效率为代价的。
第八章 声卡和音箱
8.5.2.选购和测试音箱 1.到现场去听
8.5 实战:选购、测试声卡和音箱
Hale Waihona Puke 2.用手去摸 目前的领先音箱品牌有:创新、漫步者、轻骑兵、爵士、麦蓝、 惠威等。
第八章 声卡和音箱
8.2.3 音箱的指标
功率 失真度 频率范围 频率响应 信噪比
8.2 基础知识2:认识音箱
第八章 声卡和音箱
8.2.3 音箱的指标
微机原理第八章 串行通信及串行接口
1. 可编程串行接口典型结构
✓状态寄存器
✓控制寄存器
✓数据输入寄存器--串行输入/并行 输出移位寄存器
✓数据输出寄存器--并行输入/串行 输出移位寄存器
2. 串行通信基本概念
在串行通信时,数据和联络信号使用同一条信号线 来传送,所以收发双方必须考虑解决如下问题: ❖ 波特率---双方约定以何种速率进行数据的发送和接收 ❖ 帧格式---双方约定采用何种数据格式 ❖ 帧同步---接收方如何得知一批数据的开始和结束 ❖ 位同步--- -接收方如何从位流中正确地采样到位数据 ❖ 数据校验--- -接收方如何判断收到数据的正确性 ❖差错处理---收发出错时如何处理 收发双方必须遵守一些共同的通信协议才能解决上述问题。
串行通信适于长距离、中低速通信
并行通信
将数据的各位同时在多根并行传输线上进行传输。
D0 0
D1 1
D2 0
源
D3 1
D4 D5
0 1
D6 1
D7 0
D0 D1 D2 D3 目 D4 的 D5 D6 D7
数据的各位同时由源到达目的地 → 快 多根数据线 → 短距离(远程费用高)
并行通信适于短距离、高速通信
工作方式下。
(8)错误检测 • 传输错误 • 覆盖错误
二、 接口与系统的连接
从结构上,可把接口分为两个部分,其中和 外设相连的接口结构与具体外设的传输要求及数 据格式相关,因此,各接口的该部分互不相同; 而与系统总线相连的部分,各接口结构类似,一 般都包括:
1. 总线收发器和相应的逻辑电路
2. 联络信号逻辑电路
接收端需要一个时钟来测定每一位的
时间长度。
波特率/位传输率---每秒传输的离散信号 的数目/每秒传输的位数。 波特率因子---
第八章工业机器人入门实用教程(ABB机器人)
02
编程实例以基础教学模块为例,具体学习机器人作直线运动的编程 技巧。
第一步:安装基础教学模块。在模块底部用梅花螺丝将基础教学模块 固定在实训台上。
03
第二步:将工具安装在机器人法兰盘末端。
04
第三步:建立机器人工具、工件坐标系(建立方法详见24讲~29讲)。
工具坐标系 工件坐标系
05
第四步:机器人“运行模式”切换至“手动模式”;工具、工件坐标 系分别选择tool1、wobj1。
42
第十四步:单击【PP移至例行程序…】,选择Path_30例行程序。
43
第十五步:半按住使能按钮不放,使电机上电,按下执行程序键,机 器人开始执行运动样例程序。
机器人程序指针
使执能行按程钮序键
44
第一步:安装激光雕刻模块。在模块底部用梅花螺丝将激光雕刻模块 固定在实训台上。
45
第二步:将工具(激光器)安装到机器人法兰盘末端。
35
第六步:建立曲线上起始点。
36
第七步:建立曲线上开始过渡点。
37
第八步:建立曲线上直线部分的终点
38
第九步:建立曲线上圆弧上第一个点。
39
第十步:建立曲线上圆弧上第二个点。
40
第十一步:同理,添加圆弧指令示教后半个圆弧及末端直线。 第十二步:建立曲线上返回过渡点。
41
第十三步:添加安全点。完成直线运动编程.
20
第四步:建立例行程序。在【Module1】模块中新建一个例行程序, 命名为Path_20(详见32讲)。
21
第五步:建立安全点。
22
第六步:建立圆弧上起始点。
23
第七步:建立圆弧上开始过渡点。
24
信息系统分析与设计 第八章 详细设计

代码设计
代码设计的基本原则
合理性原则 — 代码结构要与分类体系相适应; 简单性 —能简单、明了,以便降低误码率,提 高工作效率 ; 系统性 —代码可以分组,并有一定的分组规则, 从而在整个系统中使代码具有通用性和一致性 ; 稳定性原则 — 在一定时期内保持稳定;
代码设计
代码设计的基本原则
可扩充性原则 — 留有余地便于今后扩充; 标准化 —国际、国家和行业的有关标准是代码 设计的重要依据,应尽量采用已标准化的编码 适用性原则 — 代码适应计算机处理; 便于识别和记忆 —代码不仅要有逻辑含义,而 且还应便于识别和记忆,对于一些容易混淆的字 符和数字应少用;
代码设计
代码的种类
模块实现的计算机处理与人工处理
划分一般原则是:
(1)对复杂的计算、大量重复的数学运算,如统计、汇总、分 配等;对结构化程度高的数据处理,如数据传送、存储、 分类、检索、编制单证报表等,应由计算机处理。
(2)各种管理模型、高层次的数学模型,如运筹学、数理统计、 预测等处理,数据量大、算法复杂,适用于计算机处理。
(3)对与数据格式不固定,例外情况较多及需要经验来判断的 工作,目前没有成熟的技术可以应用或者代价太高,适合 于人工处理。
(4)决策性问题,先由计算机处理提供尽可能多的资料,来辅 助与支持人进行最后的决策。
8.2 模块的功能与性能设计
处理过程设计
IPO图 流程图 问题分析图 NS图 过程设计语言
处理过程设计原则
处理过程设计
IPO图: IPO(Input-Process-Output, IPO)是用于描 述某个特定模块内部的处理过程和输入输出关系的图。 IPO是配合HIPO详细说明每个模块的输入、输出数据 和数据加工的重要工具。常用的IPO图的基本内容如 下表所示。
有限状态机设计(4)new
“101”序列检测器的Verilog描述(三个过程)
always @(state) /*该过程产生输出逻辑 该过程产生输出逻辑*/ 该过程产生输出逻辑 begin case(state) S3: z=1'b1; default:z=1'b0; endcase end endmodule
S2:begin if(x) next_state<=S3; else next_state<=S0; end S3:begin if(x) next_state<=S1; else next_state<=S2; end default: next_state<=S0; /*default语句 语句*/ 语句 endcase end
8.3 状 态 编 码 常用的编码方式
◆ 顺序编码 ◆ 格雷编码 ◆ 约翰逊编码 ◆一位热码
一位热码编码选择对话框(Quartus Ⅱ)
状态编码的定义
在Verilog语言中,有两种方式可用于定义状态编码,分别用 parameter和'define语句实现,比如要为state0、state1、state2 、state3四个状态定义码字为:00、01、11、10,可采用下面 两种方式。 方式1:用parameter参数定义 parameter state1=2'b00,state2=2'b01,state3=2'b11,state4=2'b10; …… case(state) state1: …; //调用 state2: …; ……
第8章 有限状态机设计
有限状态机 FSM(Finite State Machine) 适于数字系统的控制模块 常用case、if-else语句描述
第八章-光电传感器输出信号的采集
None 是
三、数据采集卡
声卡
声卡作为语音信号与计算机的通用接口,其主要功 能就是经过DSP音效芯片的处理,进行模拟音频信号与 数字信号的转换,因此,声卡也可以作为一块数据采 集卡来使用。
三、数据采集卡
声卡的技术参数
声卡的技术参数主要有两个:采样位数(分辨率)和采 样率。
采样位数可以理解为声卡处理声音的解析度,这个数值 越大,解析度就越高,录制和播放声音的效果就越真实。 声卡位数反映了对信号描述的准确程度。目前声卡的主流 产品位数都是16位,而一般数据采集卡大多只是12位。
量程:输入信号的幅度,常用有±5V、±10V、0~5V、
0~10V,要求输入信号在量程内进行。
增益:输入信号的放大倍数,分为程控增益和硬件增益,
通过数据采集卡的电压放大芯片将AD转换后的数据进行固定 倍数的放大。由两种型号PGA202(1、10、100、1000)和 PGA203(1、2、4、8)的增益芯片。
一、光电传感器信号的二值化处理
微型计算机所能识别的数字是“0”或“1”,即低或高 电平。 “0”或“1” 在光电信号中它既可以代表信号的有 与无,又可以代表光信号的强弱到一定程度,还可以检测运 动物体是否运动到某一特定的位置。将光电信号转换成“0” 或“1”数字量的过程称为光电信号的二值化处理。
光电信号的二值化处理分为单元光电信号的二值化处理与序 列光电信号的二值化处理。
二、DAQ设备
需要以多快的速度采集或生成信号?
对于DAQ设备来说,最重要的参数指标之一就是采样率,即 DAQ设备的ADC采样速率。典型的采样率(无论硬件定时或 软件定时)可达2MS/S。在决定设备的采样率时,需要考虑 所需采集或生产信号的最高频率成分。
Nyquist定理指出,只要将采样率设定为信号中所感兴趣的 最高频率分量的2倍,就可以准确地重建信号。然而,在实 践中至少应以最高频率分量的10倍作为采样频率才能正确 地表示原信号。选择一个采样率至少是信号最高频率分量 10倍的DAQ设备,就可以确保能够精确地测量或者生成信号。
三、数据采集卡
声卡
声卡作为语音信号与计算机的通用接口,其主要功 能就是经过DSP音效芯片的处理,进行模拟音频信号与 数字信号的转换,因此,声卡也可以作为一块数据采 集卡来使用。
三、数据采集卡
声卡的技术参数
声卡的技术参数主要有两个:采样位数(分辨率)和采 样率。
采样位数可以理解为声卡处理声音的解析度,这个数值 越大,解析度就越高,录制和播放声音的效果就越真实。 声卡位数反映了对信号描述的准确程度。目前声卡的主流 产品位数都是16位,而一般数据采集卡大多只是12位。
量程:输入信号的幅度,常用有±5V、±10V、0~5V、
0~10V,要求输入信号在量程内进行。
增益:输入信号的放大倍数,分为程控增益和硬件增益,
通过数据采集卡的电压放大芯片将AD转换后的数据进行固定 倍数的放大。由两种型号PGA202(1、10、100、1000)和 PGA203(1、2、4、8)的增益芯片。
一、光电传感器信号的二值化处理
微型计算机所能识别的数字是“0”或“1”,即低或高 电平。 “0”或“1” 在光电信号中它既可以代表信号的有 与无,又可以代表光信号的强弱到一定程度,还可以检测运 动物体是否运动到某一特定的位置。将光电信号转换成“0” 或“1”数字量的过程称为光电信号的二值化处理。
光电信号的二值化处理分为单元光电信号的二值化处理与序 列光电信号的二值化处理。
二、DAQ设备
需要以多快的速度采集或生成信号?
对于DAQ设备来说,最重要的参数指标之一就是采样率,即 DAQ设备的ADC采样速率。典型的采样率(无论硬件定时或 软件定时)可达2MS/S。在决定设备的采样率时,需要考虑 所需采集或生产信号的最高频率成分。
Nyquist定理指出,只要将采样率设定为信号中所感兴趣的 最高频率分量的2倍,就可以准确地重建信号。然而,在实 践中至少应以最高频率分量的10倍作为采样频率才能正确 地表示原信号。选择一个采样率至少是信号最高频率分量 10倍的DAQ设备,就可以确保能够精确地测量或者生成信号。
第八章 组合逻辑电路
组合逻辑电路 逻 辑 电 路 时序逻辑电路
现时的输出仅取决 于现时的输入
除与现时输入有关 外还与原状态 有 关
河南师范大学物理与电子工程学院 3
第八章
8.2 组合逻辑电路分析 电路 结构
分析步骤: 1.由给定的逻辑图写出逻辑关系表达式。
输入输出之间 的逻辑关系
2.用逻辑代数或卡诺图对逻辑表达式进行化 简。
第八章
河南师范大学物理与电子工程学院 11
例:设计三人表决电路(A、B、C)。每人 一个按键,如果同意则按下,不同意则不按。 结果用指示灯表示,多数同意时指示灯亮, 否则不亮。
1.首先指明逻辑符号取“0”、“1”的含义。 三个按键A、B、C按下时为“1”,不按时为 “0”。输出量为 F,多数赞成时是“1”,否 则是“0”。 2.根据题意列出逻辑状态表。
F3 0 0 0 0 0 0 0 0 1 1
F2 0 0 0 0 1 1 1 1 0 0
F1 0 0 1 1 0 0 1 1 0 0
F0 0 1 0 1 0 1 0 1 0 1
F3 I 8 I 9 I8 I9 F1 I 2 I3 I6 I7
第八章
F2 I 4 I5 I 6 I 7 F0 I1I3 I5 I 7 I9
显示器件: 常用的是七段显示器件 a
师范大学物理与电子工程学院 31
显示器件: 常用的是七段显示器件 a 1 0 1 b 1 1 1 c 1 1 0 d 1 0 1 e 1 0 1 f 1 0 0 g 0 0 1 a
f e
g
b
c
d
第八章
河南师范大学物理与电子工程学院 32
逻辑状态表见下页
第八章
河南师范大学物理与电子工程学院 40
火工品第八章 传爆药和导引传爆药
• 因此,直径:一般略大于雷管直径
• 长度:在一定范围内随药柱长度增加,有效作用也增大。 • 无外壳时,当装药长度为直径的两倍时,起爆能力不再增大。 • 8.3.4 导引传爆药的药量问题 • 在引信中实际采用的导引传爆药量一般相当于传爆药的三十分之一
左右。
• 8.4 传爆药
• 8.4.1 炸药的性质
中间介质 空气 纸垫 钢片 70 100 76 100 44 35 53 22 15 25 未起爆
表中数据表明,隔不同介质时,起爆能力有不同的影响。 直接接触时传爆药的起爆能力最大,因为这时爆轰波没有 衰减作用;隔纸垫时起爆能力次之;隔空气时又次之;隔 钢片时最差。
• 8.4.5 传爆管的外壳
• 外壳影响到爆速,因此就影响到传爆药的
• 8 传爆药和导引传爆药 • 8.1 概述 • 引信中典型的传爆序列为:雷管→导引传爆药(管)→ 传爆药(管)→主装药。
图8-1 导引传爆药位置示意图
1-雷管;2-导引传爆药;3-隔板;4-传爆药;5-滑块
• 导爆药和传爆药 • 相同点:均由猛炸药加工而成,输入和输出都是爆炸作 用。 • 不同点:爆炸作用的来源不同,爆炸作用的对象不同;
传爆药直径一定时,在一定范围内药量增加,药高增加,起爆能力 增加。但是,当高度近似为直径的两倍时,炸药的爆炸熄灭长度不 再增加,亦即起爆能力不再增加。
表 8.4.2.2 传爆药形状与起爆能力的关系 重量/g 2 2 2 直径/mm 15 19 25 在铜板上的熄灭长度/mm 65 80 100
当传爆药量一定时,随传爆药直径增大, 其熄灭长度增大,即起爆能力增大。
• (1)要其爆速大于被起爆装药的临界爆速;(2)爆速
大,起爆能力大。 • 密度大时,爆速大。