基于毫米波雷达测距的汽车防撞系统研究
车载毫米波雷达技术及测试方法

3
FMCW 雷达工作原理
FMCW 雷达系统主要由
环形器、震荡源、调制器、信号
处理器和天线等部分组成。典
型接口结构如图 1 所示。
发射机首先生成高频的连
续波,其频率随时间做线性变
化,无线电波经过传播首先到
达目标,然后返回接收天线。
雷达接收的目标回波与发射机
直接耦合来的信号通过混频器
叠加。由于无线电波在传播过
2.1 国际车载雷达研究发展及现状
随着汽车主动安全概念的不断发展,欧洲首先展
开广泛研究。德国 Telefunken 公司联合博世早在 1973
日本在汽车防撞和主动安全方面的研究工作开展
的也比较早。本田公司采用扇形扫描雷达传感器,实
现对整个区域覆盖式扫描,使车辆即便在弯道状态下,
也可以检测前后车辆或障碍物的相对距离。
□TELECOMMUNICATIONS NETWORK TECHNOLOGY No.6
NETWORK TECHNOLOGY
使当时巴士的事故发生率降低了 25%,从而显著减少
化,因此在混频器的输出端会出现差频信号。该差频
了 交 通 事 故 。 目 前 ,该 系 统 仍 在 广 泛 应 用 ,工 作 于
上,
表 1 为国际上典型的汽车防撞雷达性能参数。
将(公式 1)、
(公式 2)带入得到:
表 1 典型汽车防撞雷达性能参数表
(公式 3)
对于车载雷达系统,仅考虑其在
一个信号周期内的探测情况,因此对
于平均差额值,
可得:
(公式 4)
但在实际工程中,为保证测量准
确 性 ,应 采 用 单 值 测 距 ,即 需 满 足
网
络
技
防撞雷达--汽车防碰撞系统的核心

传
输
从 2 O世纪 6 O年代 至 7 O年代 末 期 , 这 一 阶段 的特
点是 微波 理论 及其 器件 集成 水平 低 ,系 统硬 件成
本 高 。对 于 防撞雷 达 系统 的性 能要求 没有 客 观 的 标 准 ,因而各 国研 制 出 的防撞雷 达样 机 的应 用效
2 发展历程
汽 车 防撞 雷 达 的研 究 始 于 2 O世 纪 6 0年 代 . 研 究 主要 在 以德 国 、美 国和 日本 为代 表 的发 达 国 家 内展 开 。2 0 世纪 8 0年 代 以来 . 汽 车防撞 雷达 系 统 的开发研 究 活跃 起来 并持 续 到今 天 。防撞 雷达
在 汽车领 域, 考虑 到运行 环境 特殊 , 对气 候 的 适应 能力和探 测距 离 的要求 , 激 光测距 的应 用具 有局 限性 。主要 是 因为激 光测距 方式 受 恶劣 的 天
射 回来 ,发射 回来的电磁波被天线接收通过接收 机形 成 回波信 号 ,然 后将 回波 信号输 入 混频 器与 原先 的本振信号混频后得到差拍信号,差拍信号 中包含了前方车辆的相对距离信息和相对速度信 息 。然后将 差拍信 号经过放 大滤 波处理 , 再经 A / D
性有 着 至 关重要 的影 响 。本 文从 汽车 雷达 的研 究背景 、 发展 历 程 、 原理 分 类 、 以及
其在 汽 车 上 的应 用 等 方面 , 对 汽 车 雷达进 行 了 简要 的综合 概 述 , 在 此基 础 上分 析
并得 出汽 车防撞 雷达 未来 的发 展 方 向。
关 键词 : 防撞 雷达 原理分 类 发 展趋 势
轻型 汽 车技 术
2 0 1 3 ( 1 / 2) 总2 8 1 / 2 8 2
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计汽车倒车防撞报警系统是一种基于超声波测距技术的安全辅助设备,能够帮助驾驶员在倒车时避免与障碍物发生碰撞,提高行车安全性。
本文将对该系统的设计进行详细介绍。
首先,该系统主要由超声波传感器、控制器和报警器组成。
超声波传感器负责探测车辆周围的障碍物距离,传输给控制器进行处理。
控制器根据传感器的数据判断是否存在碰撞的风险,并通过报警器向驾驶员发出警告信号,提醒其采取正确的行动。
在系统的设计过程中,首先需要选择合适的超声波传感器。
传感器的选择应考虑其测距范围、精度和对环境的适应性等方面。
一般来说,超声波传感器在测距范围内可以提供较高的测量精度,并且对大多数障碍物均有良好的适应性。
接下来,控制器的设计是系统中的关键部分。
控制器需要实时接收传感器上传的距离数据,并进行数据处理和决策。
控制器可以使用嵌入式系统来实现。
在数据处理方面,可以使用一些常见的算法,如滤波算法、虚拟线算法等,来进行数据处理和障碍物的识别。
在决策方面,可以设置适当的距离阈值,当距离低于该阈值时触发警报。
最后,报警器的设计需要考虑其音量和可靠性。
对于音量,报警器应具备足够的声音大小,以确保驾驶员能够听到警报并及时做出反应。
对于可靠性,报警器应具备较长的寿命和稳定的性能,以确保系统能够长时间稳定运行。
此外,为了提高系统的可用性,还可以考虑加入其它功能,如图像显示功能。
通过搭载摄像头和显示器,可以将车辆周围的情况实时显示在显示器上,使驾驶员更加直观地了解障碍物的位置和距离。
总之,基于超声波测距的汽车倒车防撞报警系统是一种重要的安全辅助设备。
通过合理选择超声波传感器、设计有效的控制器和报警器,并加入其它功能,可以实现对倒车过程的有效监控和警示,提高驾驶员的行车安全性。
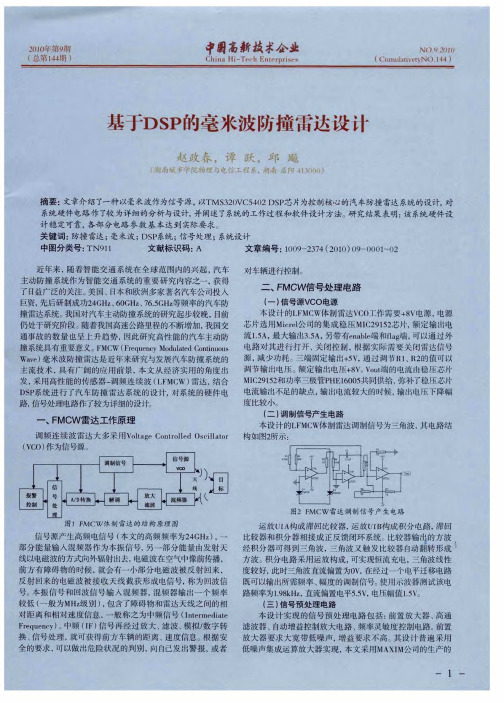
基于DSP的毫米波防撞雷达设计
,
,
,
中图 分 类号 : T
,
N 9 11
文 献 标识 码 : A
缀 瞻
谭 跃繇
.
,
。
。
文 章 编号 : 1 0 0 9
,
—
2 374
(2 0 10 )
09
—
0 0 0 1
~
0 2
近 年来 随 着智 能 交 通 系统 在 全 球 范 围 内的 兴 起 汽 车 主 动 防 撞 系 统 作 为智 能 交 通 系统 的 重 要 研 究 内 容之
了 日益 广 泛 的 关 注 美 国
。
,
、
一
对 车 辆进 行 控 制
二
一
。
,
获得
日本 和 欧 洲 多 家 著名 汽 车 公 司投 入
、
、
F MC W
信 号处 理 电路
-
等 频 率 的汽 车 防 撞 雷达 系统 我 国对 汽 车主 动 防撞 系统 的研 究 起 步 较 晚 目前 仍 处 于 研 究 阶段 随 着 我 国高速 公路 里 程 的 不 断增 加 我 国交
一
。
,
一
,
对 距 离 和 相 对 速 度 信息
一
比 较 器 和 积 分 器 相 接 成 正 反 馈 闭 环 系统 经 积 分 器 可 得 到 i 角波
。
,
。
比 较 器 输 出的方 波
,
.
,
-
x
,
,
角 波 又 触 发 比 较 器 自动 翻 转 形 成 方 波 积 分 电 路 采用 运 放 构 成 可 实 现 恒 流 充 电 三 角 波 线 性 度较好 此 时三 角波 直 流 偏 置 为0 V 在 经 过 个 电平 迁 移 电 路
基于单片机的汽车防撞报警系统毕业设计
Key words:AT89S51microcontroller, DSP, electromagnet, millimeter wave rad
该系统适应性强,有广阔的应用空间,当然还有待于进一步开发。
关键词:AT89S51单片机,DSP,电磁铁,毫米波雷达
ABSTRACT
Automotive industry and the electronics industry is the industry's two giants, along with the automotive and electronics industries continue to develop and progress in the modern car, more and more widely used in the electronics, automotive electronics higher and higher degree of . Now transport direction is toward high-density development, electronics control technology is further used in the car driving safety and navigation.
在过去的二三十年里,人们主要把精力集中在汽车被动安全性方面的研究。例如:在汽车前部或后部安装保险杠、在汽车外壳周围安装某种弹性材料、在车内相关部位安装安全带及安全气囊[3],以减轻汽车碰撞带来的伤害。所有这些安全措施都不能从根本上解决汽车发生碰撞时造成的问题。汽车碰撞的主要原因是由于汽车距障碍物的距离太近而相对速度太高造成的。因此,大力研发汽车防撞报警装置等主动式汽车安全装置,减少驾驶员的负担与判断错误,对于提高交通安全起到重要的作用。显然,此类产品的研发具有极大的现实意义和广阔的应用前景。近年来汽车的自动调速[4]、防撞、监测、自诊断、导航系统得到了广泛的应用。
基于SystemVue汽车雷达系统研究

基于SystemVue汽车雷达系统研究焦安霞【摘要】针对毫米波雷达射频、信号处理以及超分辨测角问题,提出了一种基于SystemVue进行汽车雷达系统设计和信号处理算法设计的方法;首先,利用SystemVue自带的射频库和通用算法库进行雷达系统设计,真实模拟了毫米波射频、天线及目标环境的相互影响;其次,针对快调频的FMCW信号波形,给出了完整的汽车雷达目标距离、速度和角度的信息处理算法流程;最后,针对汽车雷达系统测角精度较低的问题,提出了基于酉变换MUSIC的测角算法,大大降低了汽车雷达超分辨求角的运算量;仿真结果表明,该方法解决了汽车雷达的链路设计、射频指标对雷达信号处理性能影响的评估问题,更真实、更全面地反映了汽车雷达系统的性能,为雷达系统的研究提供了有力依据.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)004【总页数】4页(P111-114)【关键词】汽车雷达;SystemVue;雷达信号处理;U-MUSIC【作者】焦安霞【作者单位】烟台汽车工程职业学院,山东烟台 265500【正文语种】中文【中图分类】TN950 引言高级辅助驾驶系统(ADAS)是目前智能汽车发展的重要方向,其中汽车雷达在该系统中扮演了重要的角色,汽车毫米波雷达可以探测前方车辆目标,并对目标的属性和某些场景进行分类[1]。
汽车雷达可根据探测距离和功能分为:长距雷达、短距雷达和BSD扫描角雷达。
ADAS工程师根据不同功能和场景应用,利用毫米波雷达输入信息进行汽车行为控制,为用户打造稳定、舒适、可靠、可依赖的辅助驾驶功能,如ACC、LKA,FCW。
汽车雷达传感器能够提供给ADAS系统目标的空间位置和目标的类型信息。
因此,汽车雷达系统对目标的距离、速度、方位信息的测量至关重要。
SystemVue是一款EDA软件,是由德科技公司(Keysight,原安捷伦电子测量部)研发的一款商用软件,主要用于电子系统设计,可以完成通信、雷达等电子系统的信号流模块化的仿真设计[2]。
DSP在毫米波汽车防撞雷达系统中的应用
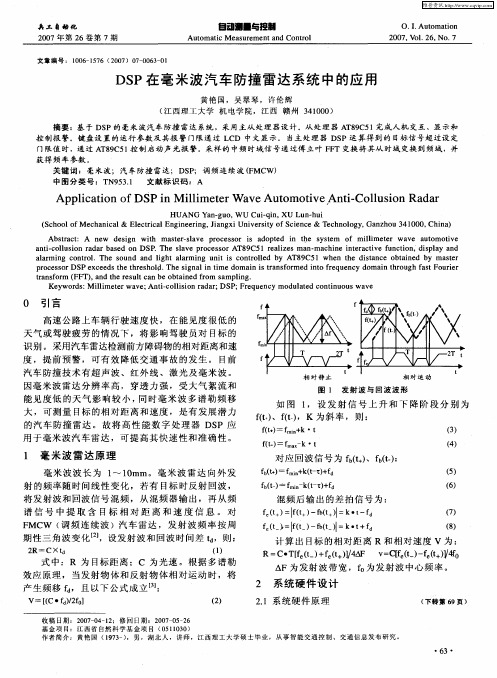
HUANG n g o W U iq n XU n h i Ya - u , Cu - i , Lu — u
( c o l f c a ia & E e t c l n ie r g Ja g i ie s y o ce c S h o o Me h n c l lcr a E g n e i , in x v r i f in e& T c n lg , n h u3 1 0 , h n ) i n Un t S e h o o y Ga z o 4 0 0 C i a
汽车防撞预警系统设计
汽车防撞预警系统设计一、系统概述汽车防撞预警系统主要由传感器、控制器、报警装置和执行机构四部分组成。
传感器负责实时监测车辆周围的环境信息,控制器对收集到的信息进行处理和分析,判断是否存在碰撞风险,如有风险,立即启动报警装置并控制执行机构进行干预。
二、传感器选型与布局1. 传感器选型为实现全天候、全方位的监测,本系统选用毫米波雷达、摄像头和超声波传感器三种传感器。
毫米波雷达具有穿透力强、抗干扰能力强等优点,适用于雨雾等恶劣天气;摄像头可识别道路标志、行人和车辆等目标;超声波传感器则用于检测车辆周围的近距离障碍物。
2. 传感器布局根据车辆结构和行驶需求,本系统将传感器均匀分布在车辆的前后左右四个方向,确保无死角监测。
具体布局如下:(1)前方:安装两个毫米波雷达,分别位于车辆前保险杠两侧,覆盖前方120°的监测范围。
(2)后方:安装一个毫米波雷达,位于车辆后保险杠中央,覆盖后方60°的监测范围。
(3)左右两侧:各安装一个摄像头,分别位于车辆左右两侧,覆盖左右两侧60°的监测范围。
(4)四周:安装四个超声波传感器,分别位于车辆前后保险杠和左右两侧,用于检测近距离障碍物。
三、控制器设计1. 算法设计(1)数据预处理:对传感器采集到的数据进行去噪、滤波等处理,提高数据质量。
(2)目标检测与识别:通过摄像头识别道路标志、行人和车辆等目标,结合毫米波雷达和超声波传感器数据,确定目标的位置、速度等信息。
(3)碰撞风险评估:根据目标的位置、速度等信息,计算与本车的相对距离和相对速度,预测未来一段时间内可能发生的碰撞情况。
(4)预警决策:根据碰撞风险评估结果,判断是否触发预警。
2. 硬件设计控制器硬件部分主要包括处理器、存储器、通信接口等。
处理器选用高性能、低功耗的嵌入式芯片,满足系统实时性和稳定性的需求;存储器用于存储算法模型和运行数据;通信接口负责与传感器、报警装置和执行机构进行数据交互。