基于毫米波雷达测距的汽车防撞系统研究
汽车智能防撞系统的文献综述

汽车智能防撞系统的研究摘要:本文综述世界智能车辆技术在自动防撞方面的应用现状,结合我国高速公路、驾驶习惯及现有传感器的技术状况,分析探究适合中国高速公路及现实国情的汽车智能防撞装置。
根据所要实现的基本功能,对比当前采用的四种常用测距方法,最终选用红外激光测距原理,建立了系统方案。
汽车红外激光智能防撞装置是一种主动式防撞系统,它能使反应时间、距离、速度三个方面都能得到良好的优化控制,可以有效地避免汽车追尾碰撞事故的发生,该系统在汽车领域的应用与其所能带来的经济效益和社会效益将会是相当可观的。
关键词:智能防撞激光测距雷达测距单片机语音报警1 前言1.1课题研究的价值和意义随着我国改革开放的不断深入和社会主义经济的不断发展,人们的物质生活日益提高,汽车己经进入千家万户,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势;与此同时,也带来了一个不可避免的问题:交通事故逐年上升。
2004年,全国公安机关交通管理部门共受理道路交通事故51.8万起,造成107077人死亡,比2003年增加2705人,上升2.6%;直接财产损失23.9亿元。
在各类事故形态中,机动车碰撞事故占绝大多数。
2004年,全国共发生机动车碰撞事故400389起,造成77081人死亡、375620人受伤,分别占总数的77.3%、72%和78.1%。
其中,正面相撞事故123577起,造成31715人死亡、128447人受伤,分别占总数的23.9%、29.6%和26.7%;侧面相撞事故196798起,造成29900人死亡、186683人受伤,分别占总数的38%、27.9%和38.8%;追尾相撞事故80014起,造成15466人死亡、60490人受伤,分别占总数的15.5%、14.4%和12.6%。
从以上数据,足以说明公路交通安全已是我国面临的重大问题。
我国的高速公路起步随晚,但发展较快。
据统计,高速公路每百公里事故率为普通公路的4倍多。
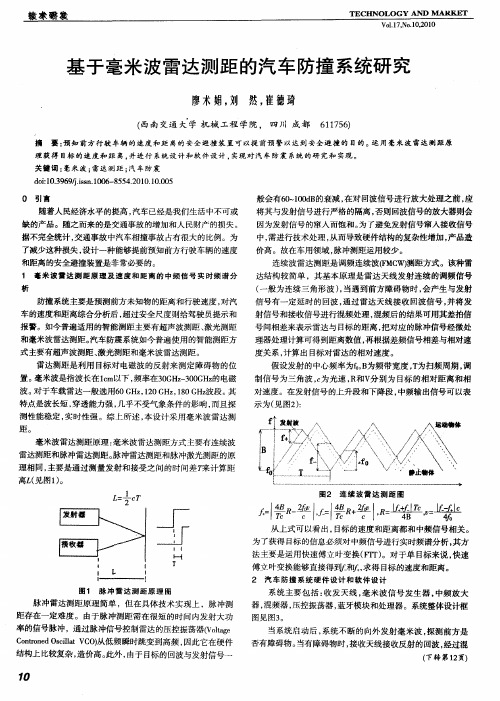
基于毫米波雷达测距的汽车防撞系统研究
达结构较简单 ,其基本原理是雷达天线发射连 续的调频信号 ( 一般为连续三角形波 ) 当遇到前方障碍物时 , , 会产生与发射 信号有一定延时 的回波 , 通过雷达天线接收回波信 号 , 并将发 射信号和接收信号进行混频处理 , 混频后 的结果雷达 测 距 原 理 简单 ,但 在具 体 技 术 实 现 上 ,脉 冲测
距存 在一定难度 。由于脉 冲测距需在很短 的时 间内发射大功
率的信号脉冲,通过脉 冲信号控制雷达 的压控振荡器f。a V lg t
C n oe si tV 0从低频瞬时跳变到高频 , ot ndO cl C ) r l a 因此它在硬件 结构上 比较复杂 , 造价高。 此外 , 由于 目标 的回波与发射信号一
£ =1 c T
图2
连 续 波 雷 达 测 距 圈
_ I一 箦
T
+ 孚
从上式可 以看出 , 目标 的速度和距离都和 中频信号相关 。
为 了获 得 目标 的 信 息必 须 对 中频 信号 进 行 实 时频 谱 分 析 , 方 其
法主要是运用快速傅立叶变换 ( 兀 ) 。对 于单 目标来说 , 快速
O 引 青
般会有6 0 d 的衰减 , 0 10 B 在对 回波信号进行放大处理 之前 , 应
随着人民经济水平 的提高 , 汽车已经是我们生活中不可或
缺的产品。随之而来 的是交通事故 的增加和人 民财产 的损失。
据不完全统计 , 交通事故中汽车相撞事故 占有很大 的比例 。为 了减少这种损失 , 设计一种能够提前预知前方行驶车辆的速度 和距离 的安全避撞装置是非常必要的。
24GHz汽车毫米波雷达实验报告
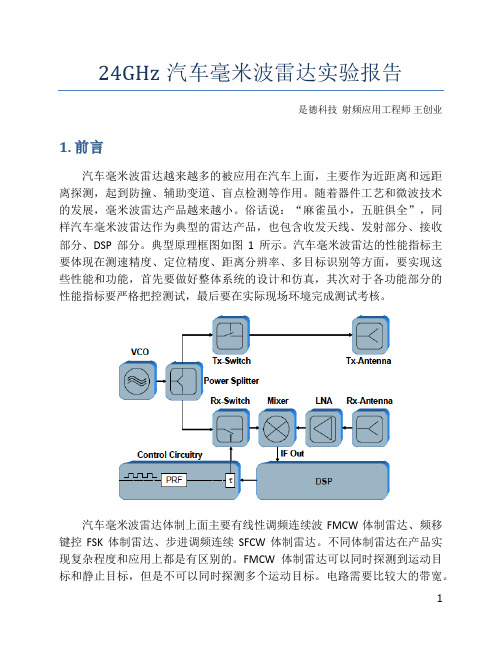
24GHz汽车毫米波雷达实验报告是德科技射频应用工程师王创业1. 前言汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。
典型原理框图如图1所示。
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。
汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。
不同体制雷达在产品实现复杂程度和应用上都是有区别的。
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。
电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。
电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。
SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。
SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。
2.实验目的在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。
典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。
利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。
基于毫米波雷达的汽车开门防撞系统
基于毫米波雷达的汽车开门防撞系统基于毫米波雷达的汽车开门防撞系统随着汽车智能化的快速发展,汽车开门防撞系统作为一项重要的安全功能得到了越来越多车辆的采用。
其中,基于毫米波雷达的汽车开门防撞系统以其高精度、大范围和快速响应等特点,成为目前最为先进的技术之一。
汽车开门防撞系统的重要性不容忽视。
目前,汽车事故中很大一部分是由于开车门时发生的碰撞造成的。
特别是在繁忙的城市街道、停车场等地方,驾驶员与其他行人、自行车或其他车辆的接触频率较高。
传统的开门方式主要依赖人眼和车窗的视野来判断周围环境,但这并不能保证百分之百的安全。
因此,开发一种可靠的汽车开门防撞系统势在必行。
毫米波雷达是一种利用毫米波频段进行无线通信和探测的技术。
相比于红外线和超声波等传统的车辆探测技术,毫米波雷达具有更长的探测距离、更高的分辨率和更强的抗干扰能力。
这使得它成为汽车开门防撞系统的理想选择。
基于毫米波雷达的汽车开门防撞系统主要由毫米波雷达传感器、控制器和警示装置组成。
毫米波雷达传感器作为系统的核心部件,可以实时监测车辆周围的环境状况,包括行人、车辆和障碍物等。
同时,它还可以识别这些目标物体的运动速度和方向,为后续的决策提供基础数据。
控制器则负责接收传感器的数据,并通过算法进行数据处理和分析,以判断是否存在开门碰撞的危险。
如果存在危险,警示装置将发出声音或闪光等信号,提醒驾驶员注意,并确保开门操作的安全。
基于毫米波雷达的汽车开门防撞系统具有许多优点。
首先,它可以实时、准确地监测车辆周围的环境,无论天气条件如何,都能够正常工作。
其次,毫米波雷达具有高分辨率和强大的抗干扰能力,可以有效地识别出小型、低速运动的目标物体,避免误报和漏报的情况发生。
此外,系统的响应速度快,可以在驾驶员开门之前及时发出警报,提供更多时间做出安全决策。
最重要的是,基于毫米波雷达的汽车开门防撞系统可以在各种复杂的交通环境中工作,为驾驶员和乘客提供全方位的安全保障。
车载雷达防追尾预警系统中的目标跟踪研究

实现 对机动 车辆 的准确跟 踪 。针 对汽车在 高速 公路 上最常见 的 匀速 、 匀加速 及转 弯运动 模型进行 仿真 实验 , 结果表 明该 算法能
够有效地跟踪 前方行驶车辆 , 知 自车 与前 车之 间距 离信息 、 探 速度信 息等 , 从而 降低 雷达 虚警率。
关 键 词 : 互 多模 型 ; 交 目标 检 测 ; 辆 ; 踪 车 跟
等相 关技术 研究 。 。 。例如上 海交通 大学卓 斌教授 等研究 开发
到 当时路 面条件 的影 响 , 制动效 果难 以保障 ;4车 辆本 身不 () 能 满足高速 公路 行驶 的性能需 求 。根 据对 沈大 、 宁 、 合 广深 、
西 临等 高速 公路 交通 事故 的统 计分 析 , 通事 故类 型如 表 1 交
郑州大学 电气工程 学院 , 郑州 4 0 0 50 1
Sc hoo of El ti a Engi e i l ecr c l ne rng, Zhe z u ng ho U ni riy, ve st Zhe ngz ou h 45 01, 00 Chi na
P N Ji SH I A e, LiS udy .t of t r t r c ng n a ge t a ki i ve c e e c lso a hi l r ar olii n voi danc s t m . om put r e ys e C e Engi erng ne i and A pplc 。 ia
基于的汽车防撞预警系统设计
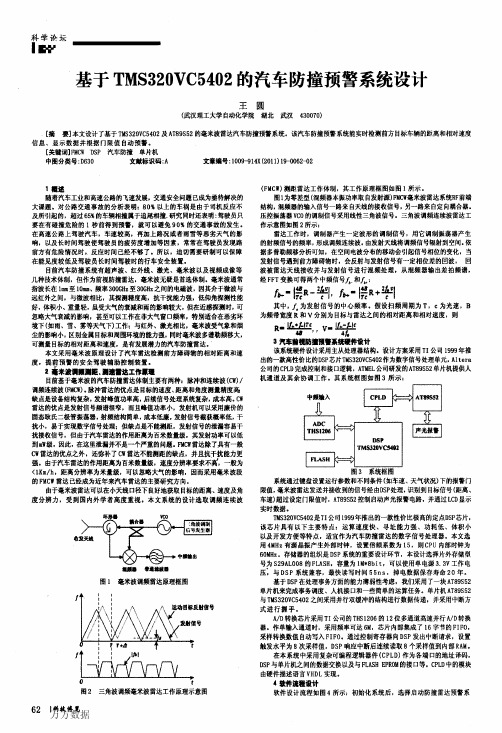
1曩述 随着汽车工业和高速公路的飞速发展,交通安全问题已成为亟待解决的 大课题。对公路交通事故的分析表明:80%以上的车祸是由于司机反应不 及所引起的,超过65%的车辆相撞属于追尾相撞.研究同时还表明:驾驶员只 要在有碰撞危险的1秒前得到预警.就可以避免90%的交通事故的发生。 在高速公路上驾驶汽车,车速较高,再加上路况或者雨雪等恶劣天气的影 响,以及长时间驾驶使驾驶员的疲劳度增加等因素,常常在驾驶员发现路 前方有危险情况时,反应时间已经不够了。所以,迫切需要研制可以保障 在能见度较低及驾驶员长时间驾驶时的行车安全装置。 目前汽车防撞系统有超声波、红外线、激光、毫米波以及视频成像等 几种技术体制,但作为前视防撞雷达。毫米波无疑是首选体制。毫米波通常 指波长在ll至10B、频率300GHz至30GHz之间的电磁波,因其介于微波与 远红外之间,与微波相比,其探测精度高,抗干扰能力强,低仰角探测性能 好,体积小、重量轻,虽受大气的衰减和雨的影响较大,但在近感探测时,可 忽略大气衰减的影响。甚至可以工作在非大气窗口频率,特别适合在恶劣环 境下(如雨、雪、雾等天气下)工作;与红外、激光相比,毫米波受气象和烟 尘的影响小,区别金属目标和周围环境的能力强,同时毫米波多谱勒频移大, 可测量目标的相对距离和速度,是有发展潜力的汽车防撞雷达。 本文采用毫米波原理设计了汽车雷达检测前方障碍物的相对距离和速 度,提前预警的安全驾驶辅助控制装置。 2毫米波啊颤■鼯.嗣蠢■达工作—曩 目前基于毫米波的汽车防撞雷达体制主要有两种:脉冲和连续波(cW)/ 调频连续波(FMCW)。脉冲雷达的优点是目标的速度、距离和角度测量精度商 缺点是设备结构复杂,发射峰值功率高,后续信号处理系统复杂,成本高。cw 雷达的优点是发射信号频谱很窄,而且峰值功率小,发射机可以采用廉价的 固态耿氏二极管振荡器,射频结构简单,成本低廉,发射信号截获概率低,干 扰小。易于实现数字信号处理;但缺点是不能测距。发射信号的泄漏容易干 扰接收信号,但由于汽车雷达的作用距离为百米数量级,其发射功率可以低 到删级,因此,在这里泄漏并不是一个严重的问题.FMCW雷达除了具有一般 cw雷达的优点之外,还弥补了cw雷达不能测距的缺点.并且抗干扰能力更 强。由于汽车雷达的作用距离为百米数量级,速度分辨奉要求不高,一般为 <IXm/h,距离分辨率为米量级,可以忽略大气的影响.因而采用毫米波段 的FMCW雷达已经成为近年来汽车雷达的主要研究方向。 由于毫米波雷达可以在小天线口径下良好地获取目标的距离、速度及角 度分辨力,受到国内外学者高度重视。本文系统的设计选取调频连续波
汽车防碰撞系统研究文献综述
汽车防碰撞系统研究文献综述1.引言汽车碰撞有汽车碰撞到固定的物体或与行驶中的汽车相撞两种类型。
为了防止汽车在行驶中,特别在高速行驶时发生碰撞,一些现代汽车已装备了自动控制防碰撞系统,这是一种主动安全系统。
汽车行驶时,防碰撞系统处于监测状态,当汽车接近前车车尾或超越前车时,该系统将发出警告信号。
在发出警告后,如果驾驶员没有采取减速制动措施,该系统便启动紧急制动装置,以避免发生碰撞事故。
2.概述防碰撞控制系统装有测距传感器,它们利用激光、超声波或红外线,测得汽车与障碍物间的距离,这个距离信号,加上车速传感器和车轮转角传感器的信号送入电子控制器,通过计算求出行驶汽车与前方物体的实际距离以及相互接近的相对速度,并向驾驶员发出预告信号或显示前方物体的距离。
当将要碰撞时,控制器向制动装置和节气门控制电路发出控制指令,使汽车发动机降速并及时制动,从而有效地避免碰撞。
3.测距传感器(1)防碰撞传感器① CCD照相机CCD(电荷耦合器件)摄像元件可以读取受光元件接收的光通量放出的电流值,并作为图像信号输出。
在夜间,由于照相机处于低照度的环境,只有在汽车前、后照灯打开时才能确认障碍物。
汽车装设的CCD照相机如上图所示,当点火开关接通时,变速器换档杆换到前进档或倒档,多功能显示板上就能显示出车辆前方或后方的图像。
②激光雷达激光雷达是从激光发送至被测物体,然后反射回来被接收,其间的时间差即用来计算至障碍物的距离。
早期的车用激光雷达都是发送多股激光光束,并依靠前车反射镜的反射时间来测定距离。
现代汽车除了测定前方车的距离外还要对前方多辆车的位置进行辨识,因而开始采用扫描式激光雷达。
根据物体的反射特性,激光的反射光亮变化很大,因此可能检测出的距离也是变化的。
由于车辆后部的反射镜等容易反射,故可以检测出稳定的较长距离。
有少许凹凸的铁板等因不能得到充足的反射光量,故测出的距离较短。
另外,在检测侧面方向及后方的障碍物时,与检测前方障碍物的情况不同,如果障碍物上没有反射镜,那么由于各种障碍物的反射特性变化很大,故可能稳定测出的距离变短。
防撞雷达--汽车防碰撞系统的核心

防撞雷达--汽车防碰撞系统的核心随着汽车的智能化和自动化程度不断提升,汽车防碰撞系统越来越受到人们的关注。
而防撞雷达则是汽车防碰撞系统中的核心部件之一。
本文将从防撞雷达的基本原理、不同类型、应用现状等方面展开论述。
一、防撞雷达的基本原理防撞雷达是一种利用无线电波实现距离检测的装置,其工作原理基于雷达信号的反射。
当发射的无线电波遇到障碍物并被反射回来后,系统通过测量反射信号的强度、频率和相位等参数计算出障碍物的距离和方位。
通过不断扫描周围环境,防撞雷达可以实时监测到汽车周围的障碍物,并根据其距离和方位发出警示或控制汽车的行驶路线,从而避免碰撞事故的发生。
二、不同类型的防撞雷达目前市场上常见的防撞雷达有超声波雷达、毫米波雷达和激光雷达三种类型。
超声波雷达主要基于超声波的反射原理,具有响应速度快、成本低等特点,但其检测距离较短,且易受到环境噪声的干扰,因此在实际应用中受到了一定的限制。
毫米波雷达则利用毫米波信号实现距离测量,具有高精度、高灵敏度和抗干扰能力强等诸多优点,被广泛应用于自动驾驶汽车及其他智能化汽车领域。
激光雷达最大的优势是其精度非常高,可以实现高精度三维地图构建。
但由于成本较高,一般只被用于高档车型或自动驾驶领域等特定场合。
三、防撞雷达的应用现状近年来,随着智能化汽车的流行,防撞雷达的应用范围也越来越广泛。
目前,防撞雷达已成为主流汽车防碰撞系统的核心部件,且将在未来持续发挥着重要作用。
例如,在一些高端车型中,防撞雷达已经被用于实现自适应巡航和自动泊车等功能;在一些中低端车型中,防撞雷达也被广泛地应用于倒车雷达、前方障碍物检测等功能。
据统计,到2025年,全球汽车雷达市场规模将达到480亿美元,其中防撞雷达的市场份额将占据更大比例,可见其广泛应用的前景。
综上所述,防撞雷达作为汽车防碰撞系统的核心部件之一,具有重要意义。
其基本原理、不同类型以及应用现状的了解,将有助于我们更好地理解汽车防碰撞系统的工作原理,掌握防撞雷达的选型与应用技能,提高汽车的安全性和智能化程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TECHNoLoGY AND
MAkKET
V01.17,No.10,2010
基于毫米波雷达测距的汽车防撞系统研究
廖术娟,刘 然,崔德琦
(西南交通大学机械工程学院,四川成都611756)
摘要:预知前方行驶车辆的速度和距离的安全避撞装置可以提前预警以达到安全避撞的目的。运用毫米波雷达测距原 理获得目标的速度和距离,并进行系统设计和软件设计,实现对汽车防震系统的研究和实现。 关键词:毫米波;雷达测距;汽车防震 doi:10.3969/j.issn.1006-8554.2010.10.005
交通出版社.2004.3.
【5】刘雄亚.透光复合材料——碳纤维复合材料及其应用[M】.
北京:化学工业出版社.2006.9.
(上接第10页)
频器、中频放大器和A/D转换器输入处理器,从而得出目标的行 驶速度和距离。通过对速度和距离的分析,判断是否安全,如果 不安全则把速度和距离通过蓝牙模块传送到驾驶员的手机上, 引起驾驶员注意,达到提前预警的目的。 系统的软件设计:系统首先初始化,包括处理器和蓝牙模 块以及外围器件tnA/D转化器的初始化,系统处于正常工作状 态时,提取A/D转化后的数据,然后通过处理器的分析处理,得 到前方物体的距离和速度信息,从而判断是否安全,其工作流
0引曹
般会有60~100dB的衰减,在对回波信号进行放大处理之前,应 将其与发射信号进行严格的隔离,否则回波信号的放大器则会 因为发射信号的窜入而饱和。为了避免发射信号窜入接收信号 中,需进行技术处理,从而导致硬件结构的复杂性增加,产品造 价高。故在车用领域,脉冲测距运用较少。
随着人民经济水平的提高,汽车已经是我们生活中不可或 缺的产品。随之而来的是交通事故的增加和人民财产的损失。 据不完全统计,交通事故中汽车相撞事故占有很大的比例。为 了减少这种损失,设计一种能够提前预知前方行驶车辆的速度 和距离的安全避撞装置是非常必要的。
图3汽车防撞系统整体设计框图
程图见图4。应用程序编程语言采用C语言,有效地提高系统的 实时性、准确性。
3结论
针对连续波雷达测距是调频连续波(rMCV0测距方式,分 析目标的速度和距离都和中频信号相关,并运用快速傅立叶变
换能够直接得现【和哌,求得目标的速度和距离。通过设计防撞
系统的汽车防撞系统整体设计框图和1=作流程图,并进行系统 的软件设计和实现。该防撞系统能够快速准确地测量出行驶中 汽车的速度和前方障碍物的距离,为驾驶人员提供准确的判断 信息或者在驾驶人员还未发现障碍物时,提前预警以达到安全 图4防撞系统工作流程圈 避撞的目的。
:
vco)从低频瞬时跳变到高频,因此它在硬件
结构上比较复杂,造价高。此外,由于目标的回波与发射信号一 7D
万方数据
掳枣'璐发
TECHNOLOGY AND MARKET
Vd.17,No.10,2010
好的传递,确保了黏结面不会发生剥离。 5碳纤维片加固补强的方法 抗裂缝补强:沿裂缝的垂直方向粘贴。 抗剪补强:粘贴时与地面保持U型环包,或者在梁的两个 侧面竖直进行,这就相当于使抗剪箍筋加强了。 抗弯补强:碳纤维片贴在受拉的一侧。 剪力墙补强:在剪力墙单面或双面沿抗剪配筋方向粘贴碳 纤维片。 柱状中心受压构件补强:柱中心环包粘贴。 6碳纤维片加固补强的施工要点 施工中,碳纤维片不能被弯折或碰撞,以免出现碳纤维断 丝,这是因为碳纤维丝很脆、很细,断丝很容易;碳纤维片纵向 接头,搭接的地方要与构件应力的最大区段分开,而且要搭接 一定的距离,多层粘贴进行时,在同一个部位不可以进行各层 的搭接,而且层间也要错开一定的距离;粘贴碳纤维片要平整 密实,不能出现翘边或空鼓;粘贴碳纤维片的混凝土结构表面 要处理密实平整。露钢筋的要防锈、除锈,对混凝土裂缝要做一 定的处理。要打磨平整粘贴表面,拐角处直径要打磨成具有一 定长度的圆角,同时要保持表面的干燥、清洁;根据施工的气候 条件和不同的温度情况进行环氧腻子、底层涂料、黏结用环氧 树脂等的不同型号的选择;能够在不断有震动的交通中进行施 工作业。振动对试件的负载情况不会在碳纤维片黏结在混凝土 黏结剂固化过程中发生任何负面影响。 7碳纤维片加固补强设计建议 在实际工程中,加固构件属于二次受力。如果原结构有较 小的受力,可以简单的考虑一个共同的工作系数,以方便设计, 如果原结构有较大的受力,那么要先计算加固前构件截面上钢 筋的应力、混凝土,然后按照平截面假定分析计算;碳纤维片加 固补强混凝土构件是一种新技术,碳纤维片的强度取值要在厂
1
连续波雷达测距是调频连续波(FMC聊测距方式。该种雷
达结构较简单,其基本原理是雷达天线发射连续的调频信号 (一般为连续三角形波),当遇到前方障碍物时,会产生与发射
毫米波霄达测距原理及速度和距离的中频信号实时频谱分
析
防撞系统主要是预测前方未知物的距离和行驶速度,对汽 车的速度和距离综合分析后,超过安全尺度则给驾驶员提示和 报警。如今普遍适用的智能测距主要有超声波测距、激光测距 和毫米波雷达测距。汽车防震系统如今普遍使用的智能测距方 式主要有超声波测距、激光测距和毫米波雷达测距。 雷达测距是利用目标对电磁波的反射来测定障碍物的位 置。毫米波是指波长在lcm以下,频率在30GHz~300GHz的电磁 波。对于车载雷达一般选用60
12
万方数据
GI-Iz波段。其
特点是波长短,穿透能力强,几乎不受气象条件的影响,而且探 测性能稳定,实时性强。综上所述.本设计采用毫米波雷达测 距。 毫米波雷达测距原理:毫米波雷达测距方式主要有连续波 雷达测距和脉冲雷达测距。脉冲雷达测距和脉冲激光测距的原
理相同,主要是通过测量发射和接受之间的时间差睐计算距
离£(见图1)。
L=丢cr
图2连续波雷达测距图
仁i箦冠一警l'卢f等R+孚I小监孵舻屿班
从上式可以看出,目标的速度和距离都和中频信号相关。
I
图1脉冲雷达测距原理图 脉冲雷达测距原理简单,但在具体技术实现上,脉冲测 距存在一定难度。由于脉冲测距需在很短的时间内发射大功 率的信号脉冲,通过脉冲信号控制雷达的压控振荡器(Voltage
8结语
总之,随着我国经济社会的不断发展,交通量日益增加,过 去修的钢筋混凝土桥梁很多都已经无法满足今天的需求,很多 都已经出现了这样那样的病害,而对旧桥梁进行加固又是比较 复杂的工程,同时也需要一种重要的材料在加固中运用,碳纤 维由于其特有的特性和品质、成熟的应用环境,其价格在逐渐 下降,而且碳纤维补强技术具有明显的符合实际条件的优越 性,在桥梁加固中越来越受到人们的关注,相信今后的桥梁加 固中,碳纤维将广泛被应用,为我国的桥梁建设提供良好的材 料,为我国小康社会的建设打下良好的基础。 参考文献: 【1】杨红.病险水工程碳纤维补强加固技术【Mq.北京:水利水 电出版社.2008.1. 【2】张劲泉,王文涛.桥梁检测与加固手册【M】.北京:人民交通 出版社.2007.2. [3】张树仁,王宗林.桥梁病害诊断与改造加固设计[M】.北京: 人民交通出版社.2006.4. 【4】刘来君,赵小星.桥梁加固设计与施工技术【M】.北京:人民
家提供的设计值上乘以一定的折减系数;用厚度较小的碳纤维 片加固钢筋混凝土梁时要求梁的高度提高小,因此要进行刚度 的验算;为了确保碳纤维片充分发挥其强度,要尽可能避免发 生黏结破坏。黏结用胶要选择有可靠性能的,对加固构件的混 凝土强度也有一定的要求,端部要有一定的锚固措施,而且尽 可能的让锚固长度大一些;碳纤维片加固构件时,要特别注重 施工的质量,否则就会对加固的效果发生很大的影响,同时纤 维片的端部要考虑锚固措施。
GHz,120 GHz,180
信号有一定延时的回波,通过雷达天线接收回波信号,并将发 射信号和接收信号进行混频处理,混频后的结果可用其差拍信 号间相差来表示雷达与目标的距离,把对应的脉冲信号经微处 理器处理计算可得到距离数值,再根据差频信号相差与相对速 度关系,计算出目标对雷达的相对速度。 假设发射的中心频率为矗。B为频带宽度,T为扫频周期,调 制信号为三角波,c为光速,R和v分别为目标的相对距离和相 对速度。在发射信号的上升段和下降段,中频输出信号可以表 示为(见图2):
Controned Oseillat
卜一!
I
士≯
为了获得目标的信息必须对中频信号进行实时频谱分析,其方 法主要是运用快速傅立叶变换(n'I')。对于单目标来说,快速f和‘,求得目标的速度和距离。
2汽车防撞系统硬件设计和软件设计 系统主要包括:收发天线。毫米波信号发生器,中频放大 器,混频器,压控振荡器,蓝牙模块和处理器。系统整体设计框 图见图3。 当系统启动后,系统不断的向外发射毫米波,探测前方是 否有障碍物。当有障碍物时,接收天线接收反射的回波,经过混 (下转第12页)