摆动机构
液压扳手摆动油缸机构方案分析

, 。 J
作业周 期 长 , 动 强 度 大 , 经 常 使 螺 栓 报 废 , 且 劳 还 而
各 螺栓 的 拧 紧 力 矩 的 统 一 难 以得 到 保 证 。 因 此 , 开 发研 制 高 效 、 靠 、 用 于 大 直 径 紧 固 件 的拆 装 设 可 适 备 , 有 重大 的现实 意 义 。 具
Ab ta t F rte s n ig c l d rtpe o y rul en h,tr u h te a ay i d c c ain frt o aig p rm e sr c : o h wign yi e y fh da i wr c n c h o g h n l ssa a u t o hel t a a — n l l o c n tr fi x c t e me h ns , fr l n sg r c n t n o o at g p rm ee s ae prs n e i t ih te es o t e e ui c a im s v o mua a d de in p e o dio ft lc i a a tr r e e td,w h whc h i he n
YUAN n. Xi HU u c i Xi— h ( 北水 利水电学 院 机械工程 系 , 南 郑州 华 河 40 4 ) 50 5
( h eat e t f a h eyE g e r go N . hn y r l n yre c i E g e r gC l g , h n zo 5 0 5 C i ) T eD p r n o M c i r n i ei o hC iaH da i ad H e l tc n i ei o e e Z e gh u4 0 4 , h a m n n n f uc o e r n n l n
摆辊控制张力原理
摆辊控制张力原理摆辊控制张力原理是指通过摆动辊筒的运动来调节张力的一种方法。
在很多工业生产过程中,特别是在纺织、印刷、包装等行业中,保持材料的适当张力是非常重要的。
过高或过低的张力都会对产品质量产生不良影响,因此,控制张力是一项关键的工艺。
在传统的张力控制中,通常使用张力感应器和张力控制器来实现。
张力感应器通过测量材料上的张力,并将其转化为电信号,传输给张力控制器。
然后,张力控制器根据这些信号来调节驱动辊或张紧装置的速度和力度,以使材料保持恒定的张力。
然而,传统的张力控制方法存在一些问题。
例如,当材料的张力突然变化时,传感器可能无法及时捕捉到这种变化,从而导致控制的延迟。
此外,传感器的安装和调试也需要一定的技术和时间成本。
为了解决这些问题,摆辊控制张力原理应运而生。
摆辊是一种通过摆动来调节张力的装置,它通常由一个辊筒和一个摆动机构组成。
辊筒负责与材料接触,而摆动机构则通过改变辊筒的位置和角度来调节张力。
具体来说,当材料张力增加时,摆动机构会使辊筒向上移动,从而减小材料与辊筒之间的接触面积,进而减小张力;反之,当材料张力减小时,摆动机构会使辊筒向下移动,增大接触面积,进而增加张力。
摆辊控制张力原理的优势在于它能够快速响应张力变化,并具有较高的控制精度。
由于摆动机构的作用,辊筒可以根据材料的张力变化实时调整位置和角度,从而有效地控制张力。
与传统的张力控制方法相比,摆辊控制张力原理更加灵活和精确。
除了在工业生产中的应用,摆辊控制张力原理也可以在其他领域发挥作用。
例如,在纸张卷取和展开过程中,保持纸张的适当张力可以避免纸张的破损或起皱。
通过使用摆辊控制张力原理,可以实现纸张的平稳卷取和展开,从而提高生产效率和产品质量。
总的来说,摆辊控制张力原理是一种通过摆动辊筒来调节张力的方法。
它具有快速响应、高控制精度等优势,可以在工业生产中广泛应用。
通过合理使用摆辊控制张力原理,可以有效地提高生产效率和产品质量,满足不同行业对张力控制的需求。
摇杆往复摆动PPT课件

第13页/共18页
4)应用实例: 起重吊车
双摇杆机构在生 产中应用很广, 右图为港口用起 重吊车。它的两 摇杆长不相等。
第14页/共18页
总结:
一、运动副的定义和分类 二、铰链四杆机构基本组成:机架、连架杆、 连杆; 三、铰链四杆机构的类型:曲柄摇杆机构、双 曲柄机构、双摇杆机构
3)运动特点: 曲柄连续转动,摇杆往复摆动。
第9页/共18页
4)应用实 例: 搅拌机
右图所示的设备是 以曲柄为主动件, 摇杆为从动件组成 的机构。
第10页/共18页
(2)、双曲柄机构
1) 定义:在铰链四 杆机构中,若两 连架杆都是曲柄 时,此四杆机构 称为双曲柄机构。
2) 组成:机架(1)连杆(1)曲柄 (2)摇杆(0)
3) 运动特点:主动曲柄等速转动,从动曲柄变速转动。
第11页/共18页
4)应用实例: 惯性筛分机
当主动曲柄等速转动时,从动曲柄 作周期性变速转动,利用变速转动 和物料的惯性达到筛分目的。
第12页/共18页
(3)、双摇杆机 1)定构义:在铰链四杆机
构中,若两连架杆都 是摇杆,此机构称为 双摇杆机构。 2) 组成:机架(1)连杆(1) 曲柄 (0)摇杆(2)
第15页/共18页
铰链四杆机构的基本类型及运动特点:
起重机
第16页/共18页
第17页/共18页
感谢您的观看!
第18页/共18页
低副
高副
第5页/共18页
高副
铰 链 转 动 副
第6页/共18页
二、铰链四杆机构
1、定义: 由四个杆件通过铰链(转动副)连接而成的机构,称为铰链四杆机构。
机械毕业设计51.5兆牛摆动剪切机构设计说明书

1.5兆牛摆动剪切机的设计1绪论1.1课题选择的背景和目的摆动剪切机是安装在500型钢热连机前后,用于切头切尾和卡钢事故的处理剪。
随着国民经济的发展,需要更多数量的,更多品种,更高质量的型钢。
为满足这一需求而型钢的发展不外乎两个,一是挖潜改造旧轧机,二是上新设备,采用新技术新工艺使型钢设备现代化。
对我过来讲两条腿走路更为重要。
用新技术更新改造的旧轧机可以少花钱多半事见效快。
500/700热连轧机组是原鞍钢第二初轧厂的设备现以安装在第一炼刚厂小钢连车间,采用第一炼钢厂的连铸坯,断面300*300mm长20米。
生产90*90平方毫米和60*60平方毫米的坯料。
型钢热连轧机组的生产率高,成品率好采用直列式布置采用普通热轧法。
700型钢热连轧采用箱-主箱孔型系统,而500型钢热连轧组采用菱-方孔型系统轧机生产正常。
但是摆动剪切机随着生产速度的提高,经常出现滑道断裂。
本设计对摆动剪进行分析改进方案,解决生产中存在问题。
通过单体机械设计,掌握单体设备在700/500连轧机组的位置为总体方案的选择创造条件。
通过分析局部观看总体方案的全局达到提高综合设计能力和独立分析能力,通过单体机械摆动剪破坏原因分析把理论知识和生产实际结合起来,这就是选择这个题目的目的。
1.2热轧型钢轧机的国内外发展趋势大,中型型钢生产,大型轧机轧辊名义直径在500-750毫米,中型轧机名义直径在350-650毫米.轨梁轧机在750-900mm。
实际,各类轧机,轧辊直径很难细分。
700/500型钢热连轧机最大轧辊直径是850mm,最小轧辊直径是500mm。
大、中型钢轧机型钢生产的特点是产品断面比较复杂,除小量的方、园扁以外大多数是异型断面产品,由于断面复杂,轧后冷却收缩不均造成轧件内部残余应力和成品形状尺寸的变化。
产品品种多,除少量专业化型钢轧机外,大多数轧机都进行多品种生产,轧辊储备量大,换辊较频繁不便于连轧生产、轧制特别多,除少量用专业化轧机采用连续式外大部分小批量生产。
实例 摆动导杆泵+制动机构

摆动导杆泵
5.1结构简图及其工作原理
5.1.1结构工程图及其装配图和爆炸图
5.1.2工作原理分析
由手轮的转动带动摆盘做大约40度的往复摆动,摆动的同时由于导杆也在过摆盘中心的密闭空间内做往复运动,由此在模型的底部的两个油口则形成进出关系。左端为进油口、右端为出油口。
5.2零件图明细表
序号
名称
实例6:
制动机构
6.1结构简图及其工作原理
6.1.1结构工程图及其装配图和爆炸图
图6.1 机构运动简图 图6.2装配图
图6.3爆炸图
6.1.2工作原理分析
该模型主要是通过两个连杆机构用特定形状的夹子把旋转的的轮子夹紧,然后通过制动夹和轮子之间的摩擦力把轮子停止下来。
6.2零件图明细表
6.2.1零件图
200
400
2000
500
3
毛头
外形铣削
3mm平底刀(刀刃20mm)
200
400
2000
300
(2)加工模拟仿真。
在“材料设置”里设置零件的模拟加工范围和毛胚尺寸,
为30×30×12.5。并全选所有刀具路径并单击“验证已选择的操作”按钮 。最终结果显示如图5.24所示。
5.3.4导杆
将模型如图调整,原点位置为下表面的几何中心,如图5.25。
1
外形
外形铣削
1.5mm平底刀(刀刃6mm)
200
400
2000
400
2
毛头
外形铣削
1.5mm平底刀(刀刃6mm)
200
400
2000
250
(2)加工模拟仿真
在“材料设置”里设置零件的模拟加工范围和毛胚尺寸,为28×28×11。并全选所有刀具路径并单击“验证已选择的操作”按钮 。最终结果显示如图5.29所示。
运动转换机构
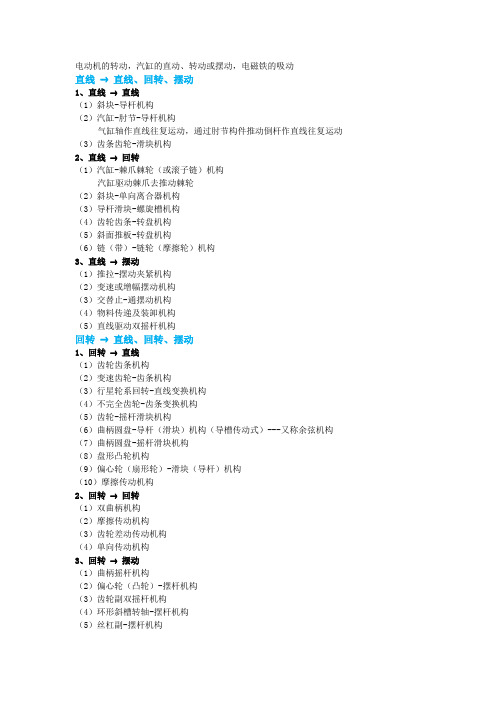
电动机的转动,汽缸的直动、转动或摆动,电磁铁的吸动直线→直线、回转、摆动1、直线→直线(1)斜块-导杆机构(2)汽缸-肘节-导杆机构气缸轴作直线往复运动,通过肘节构件推动倒杆作直线往复运动(3)齿条齿轮-滑块机构2、直线→回转(1)汽缸-棘爪棘轮(或滚子链)机构汽缸驱动棘爪去推动棘轮(2)斜块-单向离合器机构(3)导杆滑块-螺旋槽机构(4)齿轮齿条-转盘机构(5)斜面推板-转盘机构(6)链(带)-链轮(摩擦轮)机构3、直线→摆动(1)推拉-摆动夹紧机构(2)变速或增幅摆动机构(3)交替止-通摆动机构(4)物料传递及装卸机构(5)直线驱动双摇杆机构回转→直线、回转、摆动1、回转→直线(1)齿轮齿条机构(2)变速齿轮-齿条机构(3)行星轮系回转-直线变换机构(4)不完全齿轮-齿条变换机构(5)齿轮-摇杆滑块机构(6)曲柄圆盘-导杆(滑块)机构(导槽传动式)---又称余弦机构(7)曲柄圆盘-摇杆滑块机构(8)盘形凸轮机构(9)偏心轮(扇形轮)-滑块(导杆)机构(10)摩擦传动机构2、回转→回转(1)双曲柄机构(2)摩擦传动机构(3)齿轮差动传动机构(4)单向传动机构3、回转→摆动(1)曲柄摇杆机构(2)偏心轮(凸轮)-摆杆机构(3)齿轮副双摇杆机构(4)环形斜槽转轴-摆杆机构(5)丝杠副-摆杆机构摆动→直线、回转、摆动1、摆动→直线(1)摇杆-滑块(滑杆)机构(2)摆动圆盘-双滑杆机构(3)具有快速回程的摇杆滑块机构2、摆动→直线(1)摆动-间歇回转机构(2)摆动扇齿轮传动机构3、摆动→直线(1)双摇杆四杆机构(2)摆动汽缸-摆杆机构(3)速度可变的双摇杆机构复合运动机构(1)周转-自转机构(2)变速变幅振动机构(3)直线移动兼摆动机构(4)直线兼摆动组合运动机构(5)直动兼转动组合运动机构。
《机械设计基础》平面机构运动简图及自由度

一、铰链四杆机构
铰链四杆机构:以铰 链连接的四杆机构。 AD为机架,AB、DC为 连架杆,BC为连杆。
1、曲柄摇杆机构
曲柄:能做360°整周转动的连架杆。 摇杆:只能做小于360°摆动连架杆。
1为曲柄, 3为摇杆, 2为连杆, 4为机架。
2、双曲柄机构
两个连架杆均为曲柄(均可作整周转动)。
振动筛机构
例3-3
已知lBC=120mm,lCD=90mm,lAD=70mm,AD为机架。 (1)若该机构能成为曲柄摇杆机构,且AB为曲柄,求lAB. (2)若该机构能成为双曲柄机构,求lAB. (3)若该机构能成为双摇杆机构,求lAB.
则lAB ≤40mm. (2) 有两种情况:lBC最长,或lAB最长;100mm ≤ lAB ≤140mm (3)有三种情况; Ⅰ、AB最短、BC最长 40mm< lAB <70mm
第二章
平面机构运动简图及 自由度
机构由构件组成. 平面机构:所有构件都在同一平面或相互 平行的平面内运动的机构.
二、运动副及其分类
运动副:两构件直接接触并能保持一定形 式相对连接。 如:活塞与缸体 ,活塞与连杆的连接。 不同的运动副对运动的影响不同。 运动副分类: 按接触形式分: 低副和高副。
1、低副
步骤:按给定K 算出 置几何关系 + 辅助条件 寸参数。 按极限位 确定机构尺
例:3-1 已知曲柄摇杆机构的摇杆CD的长度,摆 角 和行程速比系数K,设计该机构。
k 1 步骤:(1)求 : k 1 (2)任选D点,选比例,按CD长度和摆角, 作出摇杆的两极限位置C1D、C2D 。 (3)连接C1C2,并作C1C2的垂线C1M 。
本例 实质是确定曲柄转动中心A(有无穷多解)
水轮发电机组调速机构摆动现象分析及故障处理
锤压力产生 ,使运行设备在水压变化最小时的运行
状态处于最佳运行方式 。 ③在同一时间,摄取压力水管中的压力变化及 机组运行时调速系统的接力器摆动情况曲线 ,如果 曲线周期相似 ,就可能出现共振现象。可以试着改
建议按讯号传递和反馈路线顺序检查 ,根据故障现 象 ,运用运行实际经验来详尽地观察分析故障,并 具体对故 障实施处理。现将某水 电站 (F 1/ SWl8 5 4
处理方法有 :清理气蚀 区和对气蚀区的补焊。 对清理气蚀区的要求 :对气蚀 区用电弧气刨将
气蚀破坏区的气蚀层剥去 ,磨去表面渗碳层 ,使其 露 出新鲜的金属。具体应做到 :①要清理的区域 比 实际气蚀 区要大些 ,一般应扩大 3 51 ;②气 0— 0 I  ̄ m 蚀铲除的厚度应 由气蚀区向非处理区逐渐减小 ;③ 对个别气蚀较深的点允许保 留,但其周围 9%的 5
对其 ‘ ‘ 振源”来自 外部的几种可能出现的现象进行分 析及处理,对 “ 振源”来 自X / 0 T3 型调速器 内部的 0
几 种可 能 出现 的现象也 进行 了分 析及处 理 。
l “ 振源 ”来 自外部的原 因分析与处
理 方法
1 )某 水 电 站 2台 80W (F 1/ 0k S W18 5一倒 ) 4
尾水管 中水压产生 周期性振幅波动 ;同一调压井 ( 排气设施)调节水位 时,其水压剧烈脉动 ,使水 轮机组转速不稳定等。总之故障原因是共 同的引水
管的水压力系统过水压产生周期性振幅引起波动, 导致水轮发 电机组和调速系统出现不同程度的摆动
现象 。 处 理方 法 :① 运 行 时 将 T /0 X30型调 速 器 切 换
问题的根本是找出 “ 振源” ,根据故 障现象和实际 运行工况来判断故障。确定 “ 振源”来 自外部还是
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摆动机构设计
院 系 : 信息工程学院
学 科 : 机械设计
姓 名 : 丁龙
学 工 号 :
20906071010
指导教 师 : 杨咸启
一、平面连杆机构运动分析
1)四杆机构的矢量方程
1234
FL (,L,L,L)=0
其中1234L,L,L,L全为矢量,且矢量1234L0+L+L+L
分量形式:
1122334
LcoscosLcos0LL
112233
LsinsinLsin0L
2)位置,已知1为已知的
2222tan()2DDEFEF 22
2
3
tan()2AABCBC
121
2sinDll
21142(cos)Elll 222212341412cosFllllll
1312sinAll 3114
2(cos)Blll
2222
2134141
2cosCllllll
二、曲柄滑块
1)矢量方程 120LES+L+-
L4
L3
L2
L1
X
Y
S
E
X
Y
L2
L1
分量方程 1122coscos0lls 1122sinsin0lle
2)求位置
11
2
2
sinsinlel
1122
coscossll
三、曲柄摇杆
1)矢量方程 10LHS
分量方程
113sinsin0ls
113coscos0ls
3)求位置
11
3
11
sintancoshll
221112sinshlhl
四、根据上述的所给的公式计算下列结果
算例1.四杆机构如图,其中1150lmm,2220lmm,3250lmm,4400lmm,
5
50lmm
,30,给出主动件的五个不同的角度位置,计算P点的坐标。
分别取1=4,3,2,34,56带入计算公式计算出不同2的值,从而得出P
点的位置,并由实验观察P点的轨迹。
1() D (mm) E (mm) F (mm) 2
() '2()
4
46669 -85331 34760 -24.43 10.1
3
57158 -99000 53400 -23.04 8.03
2
66000 -132000 98400 -28.81 5.40
34
46669 -17867 16204 -35.03 25.67
56
33000 -18916 17634 -30.64 3.89
算例2.曲柄导杆
1
120lmm
,3650lmm,380hmm,计算不同位置的时候滑块的位置。
取主动件的角度分别为1=4,2,34,,32
1() 3
()
S
(mm)
3
82.93 282.52
2
90 260
56
-76.71 336.45
-72.4744 398.49
32
-90 500
C
B
A
O
φ1
φ2
L2
P
β
L4
L3
L1
X
Y
算例3. 曲柄滑块
1250lmm,2
600lmm
,20emm,计算滑块位移
s
。
取主动件不同位置的角度
1
=
4,3
, 56,,32
1() 3
()
s
(mm)
4
57.2 588
3
87.9 674
56
39.3 -145
7.7 -35
32
-60.1 -556
五、实验验证
在实验室利用机构机架搭建平面四杆机构,主动件由电动机带动做匀速运动
旋转运动, CD杆为曲柄摇杆做来回的往复的运动。在机构的AB边上不同位置
上接入杆EP为外杆,实验观察不同位置P点的运动轨迹,并画出P点的轨迹图,
分析P的运动轨迹。P点轨迹分析:当杆接近A点,角度小于、等于90时,P点
的轨迹接近与椭圆;当杆在AB中间时,不同角度时,P点轨迹都呈长条状且两
头较尖;当杆接近点B时,P点轨迹又同接近A点轨迹相似。