摆动机构的设计
曲柄摇杆机构设计方法

曲柄摇杆机构设计方法作者姓名:XXXX专业名称:机械工XXXX及自动化指导教师:XXXX讲师摘要曲柄摇杆机构中构件的运动样式多样,可以实现给定运动规律或运动轨迹且承载能力高、耐磨顺,制造简单,已于获得较高的制造精度,因此曲柄摇杆机构在各种机械仪器中获得广泛的应用。
本文针对曲柄摇杆机构的行XXXX速度变化速度系数和给定点的轨迹设计曲柄摇杆机构,通过深入分析机构的行XXXX数度比k、摇杆摆动角'-:、最小传动角,极为夹角和摇杆摆动角等运动性能参数与结构尺寸间的关系。
通过引入曲柄固定铰链点的位置角建立了曲柄摇杆和机架长度关于二和「的显示函数关系,通过解析法、几何作图法、和实验法设计曲柄摇杆机构。
在此基础上研究机构设计的可能附加要求极其相应的设计方法为曲柄摇杆设计提供各种可能选项并对曲柄摇杆的急回特性和死点情况进行说明。
关键词:曲柄摇杆机构行XXXX速度系数摇杆摆动设计方法AbstractThe diversity of movement component in the crank rocker mechanism can achieve given amotion or motion trajectory and have the high bearing capacity, wear-resisting, simple manufacture,and higher manufacturing accuracy. therefore ,the crank rocker mechanism is widely used in various mecha ni cal in strume nt.In view of the crank rocker mecha nism of velocity fluctuati on velocity coefficient and the design of crank rocker mechanism by track point, Analysis the mechanism of the stroke number ratio K , the rocker swing an gle mi nimum tran smissi on an gle, extremely an gle and rocker swi ng an gle moti on parameter and t he relati on ship betwee n structure size deeply. Introduced the crank fixed hinge point position angle of crank rocker and the frame len gth on and display fun cti on is built, by the an alytic method, the geometric drawing method, the design of crank rocker mechanism and experimental method. On the basis of the research on the design method of mecha nism desig n may have additi onal requireme nts and other extremely corresp onding , various possible opti ons and the crank rocker quick retur n characteristics and the dead are described for crank and rocker desig n.Key words cran k,rocker,travel speed,desig n目录摘要 (I)Abstract ............................................................................................. L L 目录.. (IIIII)1绪论...................................................... 1.. 2平面四杆机构概述 (3)2.1平面四杆机构的基本型式 (3)2.2平面四杆机构的基本特性 (4)2.2.1急回特性 (5)2.2.2死点位置 (6)2.2.3传动角和压力角 .................................. 7. 3曲柄摇杆机构的设计 (9)3.1解析法设计曲柄摇杆机构 (9)3.1.1附加要求及其机构设计方法 (11)3.2几何作图法 (13)3.2.1按照给定的行XXXX数度变化系数设计曲柄摇杆 (13)3.2.2按给定连杆位置设计四杆机构 (14)3.3按照给定点的运动轨迹设计曲柄摇杆机构 (14)3.4曲柄摇杆机构设计方法的比较......................... 1 44 曲柄摇杆机构的特性运用 (16)4.1曲柄摇杆机构死点特性分析极其运用 (16)4.1.1摇杆主动时机构的死点情况 (16)4.1.2曲柄主动时机构有死点位置的条件 (16)4.1.3满足有死点条件的曲柄摇杆机构的死点个数及位置情况分析 ......................................... 1.74.1.4曲柄摇杆机构有死点条件的应用 (20)4.2曲柄摇杆机构急回特性应用........................... 2 1 5曲柄摇杆机构的优化设计 (22)5.1按照最小传动角和行XXXX速度比系数最大综合优化 (22)5.1.1最小传动角的确定 (22)5.1.2优化设计 (24)5.1.3最小传动角min最大的目标函数的建立 (25)5.1.4总目标函数的建立 (26)5.2 算例(1) (27)5.2.1曲柄摇杆机构设计 (27)5.3基于图谱对曲柄摇杆的优化........................... 2 95.3.1最小传动角位置分析 (29)5.3.2极为夹角分析 (30)5.3.3摇杆摆角分析 (31)5.4曲柄摇杆优化 (31)5.4.1增大最小传动角 (31)5.5 算例(2) (32)总结....................................................... .3.3致谢....................................................... .3.4参考文献 (35)1绪论18世纪下半叶的第一次工业革命促进机械工XXXX的迅速发展,机构学在原来机械力学的基础上发展成为一门独立的科学•早在19世纪连杆机构就已经广泛的运用最简单的就是四杆机构,也是出现最早的一种连杆机构。
机构运动方案创新设计实验指导书

机构运动⽅案创新设计实验指导书机构运动⽅案创新设计实验指导书⼀、实验⽬的1.培养学⽣机构型综合的设计能⼒、创新能⼒和实践动⼿能⼒;2.培养学⽣综合应⽤所学知识对机构的结构和运动性能加以评价的分析能⼒。
⼆、实验原理任何机构都是将基本组依次连接到机架和原动件上⽽构成的。
三、实验内容1.多功能移动式残病⼈浴缸翻转机构(见动画)⑴上⾝部缸体翻转机构要求上⾝部缸体从⽔平位置向上翻转⾄70度,即翻转⾓为0-70度.可采⽤的机构:①摆动导杆机构,导杆与上⾝部缸体固装在-起,带动缸体翻转。
由直线电机带动主动杆摆动。
②双摇杆机构,上⾝部缸体作为从动摇杆,在主动摇杆驱动下作0-70度摆动. 主动杆由直线电机带动摆动。
③其它机构⑵腿部缸体翻转机构要求腿部缸体从垂直位置向上翻转⾄⽔平位置,利⽤死点保持腿部缸体在⽔平位置, 借助凸轮机构破坏死点,使腿部缸体在重⼒作⽤下复位。
可采⽤机构:①双摇杆机构,腿部缸体作为主动摇杆;②其它机构2. ⽜头创床机构(见动画)要求刨⼑(安装在滑枕上)作直线往复运动。
可采⽤的机构:①转动导杆机构和曲柄滑块机构组合,由电机驱动主动件转动。
②摆动导杆机构和滑块机构组合,由电机驱动主动件转动。
③其它机构3.翻转机(见动画)要求翻转模板装在连杆上,模板翻转180度。
①四杆机构,电机驱动。
②其它机构4.飞机起落架要求起落架上轮⼦从⽔平位置向下翻转⾄垂直位置,利⽤死点使起落架轮⼦保持在垂直位置。
可采⽤的机构:①四杆机构,电机驱动。
②其它机构5.插床机构要求插⼑作垂直上下往复直线运动,向下时(⼯作⾏程)较慢,向上运动(空程)时速度较快。
可采⽤的机构:①双曲柄机构与曲构滑块机构组合,电机驱动.②其它机构6.冲压成型机压头作垂直上下直线运动,以较⼩功率带动主动件运动时,滑块能产⽣巨⼤的冲压⼒。
可采⽤的机构:①六杆增⼒机构,电机驱动.②其它机构7.拉延压⼒机压边机构压边滑块作垂直上下直线运动,在下极限位置时,有瞬时停歇现象;同时以较⼩功率带动主动件运动时,滑块能产⽣巨⼤的冲压⼒。
机械原理第4章

LAB居中,则 LAD +LBC>LCD + LAB ∴ LAB<70mm
LAB最大,则 LAB+ LAD>LCD + LBC ∴ LAB>130mm 结果为50mm<LAB<70mm 或130mm<LAB≤LBC+LCD +LAD=250mm。
第4章 平面连杆机构及其设计
(Chapter 4 Planar linkages and design of linkages)
B A
M F C
E
D
基本内容
1.连杆机构的基本概念 1)铰链四杆机构的基本形式、应用及演化; 2)平面四杆机构的特性。 2.平面连杆机构的设计
学习重点
1)连杆机构的特性; 2)图解法设计平面四杆机构。
CD
2
对心曲柄 滑块机构
偏心曲柄 滑块机构
(2)双滑块机构
当LBC→∞时, →直线。
B 1 1
2
A A 4
2
B 3
C 4
C
3
1
2
B
3
C
4
A
双滑块机构种类:
2 1 4 3
B 2
1
A 4
3 C
2.扩大转动副
B
1 A 1 4 4 B A
2
C
2
C3
3
将B点转动副扩大
3.取不同构件为机架
A
1 2 3 4
C
B A B
2 B 4 1
A
C
2
3
C
C
4
两自由度翻转连杆机构设计

两自由度翻转连杆机构设计一、引言连杆机构是机械传动中常用的一种机构,它由多个连杆组成,通过转动或摆动实现运动。
其中,翻转连杆机构是一种特殊的连杆机构,它能够将旋转运动转化为摆动运动或将摆动运动转化为旋转运动。
本文主要介绍两自由度翻转连杆机构的设计。
二、两自由度翻转连杆机构的定义与分类1. 定义:两自由度翻转连杆机构是由两个相互连接的连杆组成,其中一个固定在地面上,另一个则可以绕着固定点做平面内的旋转和摇摆运动。
2. 分类:(1)三角形翻转连杆机构:由三个相互连接的连杆组成,其中一个固定在地面上,另外两个可以绕着固定点做平面内的旋转和摇摆运动。
(2)四边形翻转连杆机构:由四个相互连接的连杆组成,其中两个固定在地面上,另外两个可以绕着固定点做平面内的旋转和摇摆运动。
三、两自由度翻转连杆机构的设计1. 选择材料和工艺:在设计两自由度翻转连杆机构时,需要根据实际情况选择合适的材料和工艺。
一般来说,机构的主要部件应该采用高强度、耐磨损、耐腐蚀的金属材料,如铸铁、钢等。
而制造工艺则应该考虑到生产效率和成本控制。
2. 确定机构参数:在确定机构参数时,需要考虑到运动学和动力学要求。
具体来说,就是要根据运动轨迹和力学特性来确定各个连杆的长度、角度以及相对位置等参数。
3. 进行模拟分析:在进行模拟分析时,可以利用计算机辅助设计软件(CAD)或计算机辅助工程软件(CAE)进行建模和分析。
通过模拟分析可以得出机构的运动轨迹、速度、加速度等数据,并对其进行优化设计。
4. 制造装配:在制造装配过程中,需要注意各个部件之间的精确匹配和协调配合。
同时还需要对整个机构进行测试和调试,确保其能够正常运行。
四、两自由度翻转连杆机构的应用两自由度翻转连杆机构广泛应用于各种机械传动系统中,如汽车发动机、船舶引擎、空调压缩机等。
它还可以用于制造各种复杂的工具和设备,如切割机、冲床、折弯机等。
五、结论两自由度翻转连杆机构是一种基本的连杆机构,它具有结构简单、运动可靠等优点,在工程实践中得到了广泛应用。
按给定的行程速比系数K

机械原理网络课堂平面四杆机构的设计:按给定的行程速比系数K设计四杆机构已知:摇杆长度CD,摆角φ,行程速比系数K。
要求:设计曲柄摇杆机构。
解:1、计算极位夹角θθ=180(K-1)/(K+1)2、任取一点D为摇杆固定铰链中心,作等腰三角形C1C2D,两腰长度等于CD,∠C1DC2=φ。
3、以C1C2为一条边,分别作∠OC1C2=∠OC2C1=90°_θ。
以O为圆心,OC1为半径作圆β。
4、连接并延长C 1D ,交圆β于G点,连接并延长C 2D ,交圆β于F点。
圆弧C 1F 和GC 2上任意一点A到C 1和C 2的连线的夹角∠C 1AC 2都等于极位夹角θ。
曲柄轴心A 点可在这两段圆弧上选取。
注意:曲柄轴心A 不能在FG 圆弧上选取,否则机构不满运动连续性要求。
在C 1F 和GC 2两段圆弧上选取A 点时,当A 点越靠近F(或G)点时,机构最小传动角将随之减小。
)5、A 点选定后,四杆机构尺寸即确定。
设曲柄长度为a ,连杆长度为b,则AC 1=b _a,AC 2=b+a,所以,a=(AC 2_AC 1)/2,b=(AC 1+AC 2)/2说明:1)如设计时还给出其它附加条件(如给定机架尺寸或曲柄长度或连杆长度等),则A 点按相应条件确定。
2)对于给定行程速比系数K和滑块行程H时,可以用同样方法求出曲柄滑块机构.2) 对于摆动导杆机构,由于其导杆的摆角φ刚好等于其极位夹角θ,因此,只要给定曲柄长度L(或给定机架长度L AC)和行程速AB比系数K就可以由右图求得机构.。
摆动滚子从动件盘形凸轮机构设计的解析法
维普资讯
第l 期
毕艳 丽等: 摆动滚 子从 动件 盘形 凸轮 机构设 计的 解析 法
3 7
2 机构基本尺寸 的确 定
2 1 基 本尺 寸确定 的方 法 . 图 2中 0 为摆杆 的 回转 中心 , 为滚 子摆 杆的滚 子 中 以 心. 到 A Ao 为按给 定运 动规律 = , 作 出的摆 杆 各个 (
0 前
言
摆动 滚 子从 动件盘 形 凸轮 机构 的设计 主要 包 括基 本尺寸 的确 定 和 凸轮 轮 廓 的设计 . 本尺 寸 主 要 : 基 是根 据压 力 角确定 的 , 凸轮 轮廓是 根据 基本尺寸 和从 动件 的运动规律 设 计的. 去这 两部 分的 设计 常常 采 过
用图解法 , 虽然图解法简单 、 直观, 但精度低, 随着计算机技术的发展和数控机床的普及 , 凸轮机构设计的 解析 法 正逐 步取 代 传统的 图解法 .
—
z1一 (
。 ) — 1一 )i , s , ( s n 由点斜 式 可写出任 意 斜 线的 方程. 同理 , 任意 n 斜线 , 率 为 对 斜
一 ct[]一 )各 。 点 的坐标 为 : 一 ( )。 , 一 ( 。( , 1+ cs 1+ )i 同样可 写出 任意 n 斜 线 s , n
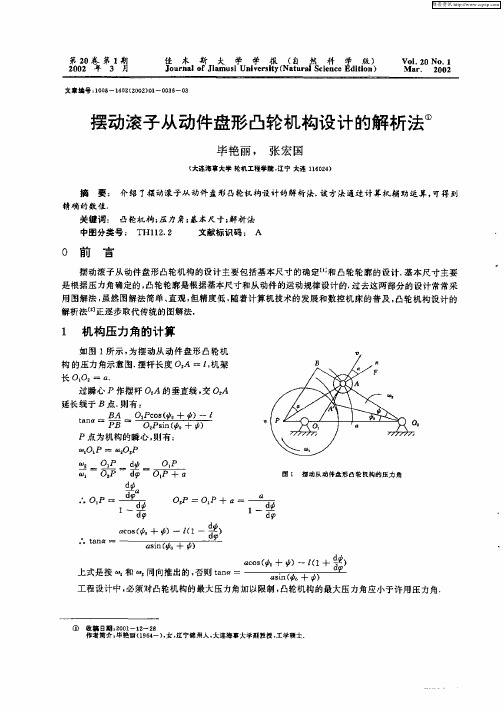
1 机构压力角的计算
如图 1 示 , 所 为摆 动从 动件 盘形 凸轮 机 构 的压力 角示意 图. 摆杆长 度 D A = f机 架 ,
长 Dl 2 n 0 = .
过瞬心 j作摆杆 )
延长线 于 B 点. 则有 :
t ana =
的垂直线 , 交
嚣一
d
—
寤
0l P —P + O ̄ — a
凸轮机构设计(图文)
凸轮机构设计(图文)一、凸轮机构概述凸轮机构是一种常见的机械传动装置,主要由凸轮、从动件和机架组成。
它通过凸轮的轮廓曲线,使从动件实现预期的运动规律。
凸轮机构具有结构简单、运动可靠、传动精度高等优点,广泛应用于各种自动化设备和机械中。
二、凸轮机构设计要点1. 确定从动件的运动规律在设计凸轮机构之前,要明确从动件的运动规律,包括位移、速度和加速度等。
这将为后续的凸轮轮廓设计提供依据。
2. 选择合适的凸轮类型根据从动件的运动规律和实际应用需求,选择合适的凸轮类型,如平面凸轮、圆柱凸轮、摆动凸轮等。
3. 设计凸轮轮廓曲线凸轮轮廓曲线是凸轮机构设计的核心部分。
设计时,要确保凸轮与从动件之间的运动协调,避免干涉和冲击。
三、凸轮机构设计步骤1. 分析运动需求在设计之初,我们需要深入了解设备的工作原理和从动件的运动需求。
这包括从动件的运动轨迹、速度、加速度以及所需的力和行程。
这些信息将帮助我们确定凸轮的基本尺寸和形状。
2. 初步确定凸轮尺寸基于运动需求分析,我们可以初步确定凸轮的直径、基圆半径和宽度等关键尺寸。
这些尺寸将直接影响凸轮的强度、刚度和运动性能。
3. 设计凸轮轮廓确保从动件的运动平稳,避免突变和冲击。
考虑凸轮与从动件之间的间隙,防止运动干涉。
优化轮廓曲线,减少加工难度和提高耐磨性。
四、凸轮机构材料选择考虑耐磨性:凸轮在连续工作中会与从动件接触,因此应选择耐磨材料,如钢、铸铁或耐磨塑料。
考虑重量和成本:在满足性能要求的前提下,可以选择重量轻、成本较低的材料。
考虑环境因素:如果凸轮机构将工作在特殊环境中,如高温或腐蚀性环境,需要选择相应的耐高温或耐腐蚀材料。
五、凸轮机构的加工与装配精确加工:凸轮的轮廓必须严格按照设计图纸加工,以确保运动的精确性。
间隙调整:在装配时,需要适当调整凸轮与从动件之间的间隙,以确保运动的顺畅。
校验运动:装配完成后,应对凸轮机构进行运动校验,确保从动件的运动符合预期。
六、凸轮机构动态分析与优化在设计过程中,动态分析是不可或缺的一环。
摆动从动件凸轮机构
4. 摆动从动件凸轮机构
Φ(δ) 图解法 解析法
2020/2/8
6
5. 平底从动件凸轮机构 可用于高速凸轮机构,如内燃机配气机构
廓线必须为外凸,即ρ>0。 偏置不影响运动规律
图解法 解析法
理论廓线与实际廓线 0
平底宽度
2020/2/8
7
6. 凸轮机构设计中的基本问题
已知理论廓线求实际廓线的方法:图解法与解析法 外包络线和内包络 线
组合运动规律
2020/2/8
推程运动线图 推程运动线图
3
3. 移动滚子(尖底)从动件盘形凸轮机构 图解法:基圆 反转法 偏距圆 e, 基圆半径 rp
2020/2/8
4
移动滚子从动件盘形凸轮廓线画法: 实际廓线 理论廓线
2020/2/8
5
理论廓线的解析求法 正偏置 N=1 and 负偏置 N=-1
凸轮的加工:铣刀中心的轨迹求法
凸轮机构压力角α
S ' ( ) N *e S &#( ) S0 S( )
曲率半径 ρ T =B –rR>0
Pitch curve
rR
B
T
TB
基圆和压力角等都在理论廓线上。
2020/2/8
Cam contour
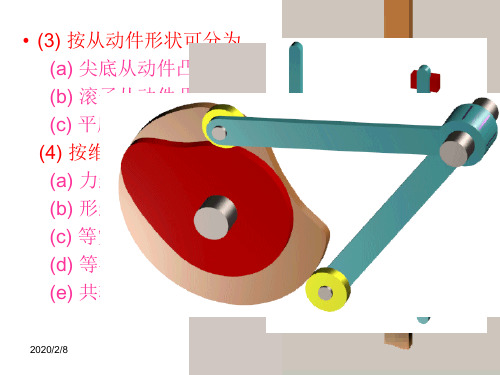
• (3) 按从动件形状可分为
(a) 尖底从动件凸轮机构
(b) 滚子从动件凸轮机构
(c) 平底从动件凸轮机构
(4) 按维持从动件与凸轮的接触方式可分为 1
(a) 力封闭凸轮机构
(b) 形封闭凸轮机构
(c) 等宽凸轮机构
(d) 等径凸轮机构
2
(e) 共轭凸轮机构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摆动机构的设计
班级:09机械
姓名:陈志坤
学号:20906071006
设计背景:
四杆机构是我们生活中最常见,应用最广泛的机构。
具有运动灵活,设计方便,功能多等特点。
此次设计我们将会实现轨迹的验证,通过实验来验证我们的设计正确性。
设计内容: 先将会进行
一、 平面连杆机构运动分析
1) 四杆机构的矢量方程
1234F L ∙ (,L ,L ,L )=0其中1234L ,L ,L ,L 全为矢量,且矢量1234L 0=+L +L +L 分量形式:
1122334L cos cos L cos 0ϕϕϕ+--=L L 112233L sin sin L sin 0ϕϕϕ+-=L
2) 位置,已知1ϕ为已知的
222
2tan()2D D E F E F ϕ±+-=
- 22
23tan()2
A A
B
C B C
ϕ±+-=- 1212sin D l l ϕ= 21142(cos )E l l l ϕ=- 222212341412cos F l l l l l l ϕ=+-+- 1312sin A l l ϕ= 31142(cos )B l l l ϕ=- 22222134141
2cos C l l l l l l ϕ=---+
二、曲柄滑块
1)矢量方程 120L E S =+L +-
分量方程 1122cos cos 0l l s ϕϕ+-= 1122sin sin 0l l e ϕϕ++= 2) 求位置
1122
sin sin l e
l ϕϕ+=-
1122cos cos s l l ϕϕ=+
三、曲柄摇杆
1)矢量方程 10L H S +-= 分量方程
113sin sin 0l s ϕϕ-= 113cos cos 0l s ϕϕ+= 3) 求位置
11
311
sin tan cos h l l ϕϕϕ+=
221112sin s h l hl ϕ=++
四、根据上述的所给的公式计算下列结果
算例1.四杆机构如图,
其中1150l mm =,2220l mm =,3250l mm =,
4400l mm =,550l mm =,30β=︒,给出主动件的五个不同的角度位置,计算P 点的坐标。
C
B
A O
φ1
φ2L2P
β
L4
L3
L1X Y
分别取1=
4π
ϕ,
3π,2π,34π,56
π带入计算公式计算出不同2ϕ的值,从而得出P 点的位置,并由实验观察P 点的轨迹。
1ϕ(︒) D (mm ) E (mm ) F (mm ) 2ϕ(︒) '2ϕ(︒) 0︒ 43669 -45331 14450 -4.45 5.14 75︒ 60158 -109000 63760 -25.64 5.23 90︒ 66000 -132000 98400 -28.81 5.40 150︒ 33000 -18916 17634 -30.64 3.89 180︒
34556
-34255
22334
-35.67
6.35
算例2.曲柄导杆
1120l mm =,3650l mm =,380h mm =,计算不同位置的时候滑块的位置。
取主动件的角度分别为1=4
π
ϕ,
2π,34π,π,32
π
1ϕ(︒)
3ϕ(︒) S
(mm ) 0
65.53 293.45 2π 90 260 2π/3
-73.71 323.33 π
-72.4744 398.49 32π
-90
500
算例3. 曲柄滑块
1250l mm =,2600l mm =,20e mm =,计算滑块位移s 。
取主动件不同位置的角度1=4
π
ϕ,
3π, 56π,π,32π
1ϕ(︒)
3ϕ(︒) s
(mm ) 0
34.4
543
3π 87.9 674
2π/3
43.3 -134
π
7.7 -35 32π
-60.1
-556
五、实验验证
装置:
如下图:
在实验室利用机构机架搭建平面四杆机构,主动件由电动机带动做匀速运动旋转运动, CD杆为曲柄摇杆做来回的往复的运动。
在机构的AB边上不同位置上接入杆EP为外杆,实验观察不同位置P点的运动轨迹,并画出P点的轨迹图,分析P的运动轨迹。
P点轨迹分析:当杆接近A点,角度小于、等于90 时,P点的轨迹接近与椭圆;当杆在AB中间时,不同角度时,P点轨迹都呈长条状且两
头较尖;当杆接近点B时,P点轨迹又同接近A点轨迹相似。