摆动导杆机构
摆动导杆机构课程设计
摆动导杆机构课程设计一、课程目标知识目标:1. 学生能理解并掌握摆动导杆机构的基本概念、工作原理及其在工程中的应用。
2. 学生能够描述摆动导杆机构的运动特性,包括运动轨迹、速度和加速度的变化规律。
3. 学生能够运用相关的数学知识,分析摆动导杆机构的几何关系,并解决实际问题。
技能目标:1. 学生能够运用CAD软件绘制摆动导杆机构的三维模型,并进行简单的运动仿真。
2. 学生能够通过实验或模拟,观察和分析摆动导杆机构的运动状态,提出并解决问题。
3. 学生能够运用所学知识,设计简单的摆动导杆机构,实现特定的运动要求。
情感态度价值观目标:1. 学生能够培养对机械运动的兴趣,增强对机械设计、制造等相关专业的认识和认同。
2. 学生通过小组合作完成课程任务,培养团队协作精神和沟通能力。
3. 学生能够认识到摆动导杆机构在生活中的应用,提高对科学技术的认识和尊重,激发创新意识。
课程性质:本课程为机械设计基础课程,旨在帮助学生建立摆动导杆机构的基本理论,培养其运用CAD软件进行设计和分析的能力。
学生特点:学生为高中二年级学生,具备一定的物理、数学基础,对机械运动有一定了解,但对摆动导杆机构的认识有限。
教学要求:结合学生特点,注重理论与实践相结合,充分运用现代教学手段,激发学生的学习兴趣,提高其动手能力和解决问题的能力。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容本课程教学内容主要包括以下几部分:1. 摆动导杆机构的基本概念:介绍摆动导杆机构的定义、分类及其在工程中的应用。
- 教材章节:第二章第一、二节- 内容:摆动导杆机构的类型、特点及应用实例。
2. 摆动导杆机构的工作原理:讲解摆动导杆机构的运动原理、运动关系及运动特性。
- 教材章节:第二章第三节- 内容:摆动导杆机构的运动分析、几何关系、速度和加速度的计算。
3. 摆动导杆机构的设计与CAD软件应用:学习如何使用CAD软件进行摆动导杆机构的设计与运动分析。
导杆机构.

导杆机构
1 2 3
导杆机构的构成与类型
摆动导杆机构的运动特点
摆动导杆机构的应用
曲柄滑块机构的演化
曲柄滑块机构可通过选不同的构件为机架演化出新的机构:导杆机构、 摇块机构和定块机构。
一、导杆机构的结构与类型
曲柄滑块机构中若选择曲柄为
固定件,就会演化成导杆机构。
其中与滑块组成移动副的杆件, 称为导杆 。
1 A
B
2
4
3 C
摆动导杆机构 : 构件2做整周转动,导杆4随滑块3做往复摆动。
二、摆动导杆机构的运动特点
摆动导杆机构具有急回特性 极位夹角等于摆角
三、摆动导杆机构的应用
牛头刨床的主运动机构为摆动导杆机构
转动导杆机构:L1>L2 摆动导杆机构:L1<L2
曲柄滑块机构 导杆机构
导杆机构
转动导杆机构
转动导杆机构—构件1为机架,构件2为曲柄,L2>L1,导杆4作整周运动。
B
1 A
导杆
2 4
3 滑块 C
特点:曲柄和导杆都能作360°周转运动。 主动曲柄作等速转动,从动导杆作变速,构件2为曲柄, L2<L1,导杆4做往复摆动。
导杆机构应用(精)

摆动导杆机构应用
2.摆动导杆机构应用实例 2)摆动导杆机构在牛头刨床上的应用
摆动导杆机构应用
小结
1.摆动导杆机构
1)结构组成 2)工作原理 2.摆动导杆机构应用实例 1) 摆动导杆机构在插床上的应用
2) 摆动导杆机构在牛头刨床上的应用
摆动导杆机构应用
作业
填空题
标出图示牛头刨床机构的导杆为 A.构件AD B.构件BC 。 C.构件DE
2)工作原理
曲柄作定轴匀速转动,带 动滑套(滑块)转动并摆 动,滑套(滑块)套在导 杆上,使导杆往复来回摆 动。
滑套
导杆
摆动导杆机构应用
2.摆动导杆机构应用实例 1)摆动导杆机构在插床上的应用 工作原理
AB构件绕销轴A作定轴转 动,带动滑块B转动并摆动 ,滑块B在导杆CD上滑动 并带动导杆CD绕销轴C作 定轴摆动,摆杆CD带动连 杆DE做平面运动,连杆D E带动滑块E和刀架及插刀 做往复运动,从而实现插削 加工。
敬请观看我的其它微课!
作者:张本升 email:79210583@
摆动导杆机构 应用
作者:张本升 单位:浙江工贸职业技术学院
所属学科:工科 课程:激光设备机械设计基础
专业:光机电应用技术 适用对象:光机电应用技术专业的学生
ቤተ መጻሕፍቲ ባይዱ 摆动导杆机构应用
教学目标
了解摆动导杆机构应用实例
摆动导杆机构应用
1.摆动导杆机构 1)结构组成
由机架· 曲柄· 摇杆(导杆) 和滑套(滑块)组成。 曲柄 机架
摆动导杆机构
二、基本机构的运动特点分析
❖(一)转动到转动的运动特性分析 ❖(二)转动到往复摆动的运动特性分析 ❖(三)转动到往复移动的运动特性分析 ❖(四)转动到间歇转动的运动特性分析 ❖(五)摆动到连续转动的运动特性分析 ❖(六)移动到连续转动的运动特性分析
第十二章 机构组合与创新设计
(一)转动到转动的运动特性分析
12、双滑块机构
双滑块机构的基本型 第十二章 机构组合与创新设计
(二)齿轮类机构的基本型
❖ 1、单级圆柱齿轮机构 ❖ 2、单级圆锥齿轮机构 ❖ 3、单级蜗杆机构
第十二章 机构组合与创新设计
1、单级圆柱齿轮机构
❖ 外啮合圆柱齿轮机构示意图
第十二章 机构组合与创新设计
2、单级圆锥齿轮机构
❖ 外啮合圆锥齿轮机构示意图
第一节 基本机构及其运动特性
❖ 一、基本机构的概念 ❖ 二、基本机构的运动特点分析
第十二章 机构组合与创新设计
一、基本机构的概念
❖ (一)连杆机构的基本型 ❖ (二)齿轮类机构的基本型 ❖ (三)凸轮类机构的基本型 ❖ (四)间歇运动机构的基本型 ❖ (五)其它常用机构的基本型 ❖ (六)挠性传动机构 第十二章 机构组合与创新设计
3、直动从动件圆柱凸轮机构
直动从动件圆柱凸轮机构的基本型 第十二章 机构组合与创新设计
4、摆动从动件圆柱凸轮机构
摆动从动件圆柱凸轮机构的基本型 第十二章 机构组合与创新设计
(四)间歇运动机构的基本型
❖ 1、棘轮机构 ❖ 2、槽轮机构 ❖ 3、不完全齿轮机构 ❖ 4、分度凸轮机构
第十二章 机构组合与创新设计
第十二章 机构组合与创新设计
4、摩擦轮机构
❖ 用于速度或方向的运动变换,即可 实现减速也可增速传动。结构紧凑 简单,运转平稳,但传动比不准确, 只能在小功率且传动比要求不是很 准确的场合应用。
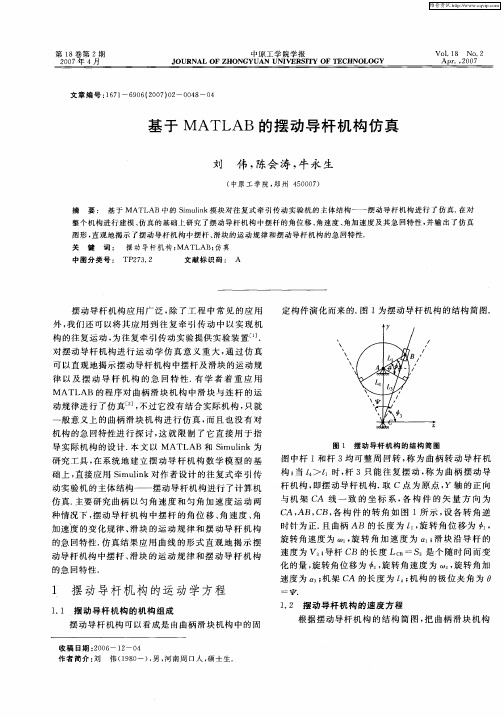
基于MATLAB的摆动导杆机构仿真
S 一 ̄ l i 3 / +2l s +z z n z :
() 3
] fa rS L[ 1[ 1 %- m7 l e g I V 3
J
一
一 “掣 ■
一 ar an ct
动 时 s l k仿 真模 型 i i mu n
的矢 量按 z和 Y坐标轴 方 向分解 可 以得 出 :
Zc s l S c s 3 l o ≯ — 3 o  ̄
Z + Z sn l S3 i 4 li — n s
() 1
() 2
Ll l +L L4
\
扎r4 L
Fn e
-』
fi a3
由( ) ( ) 可知 : 1 、2 式
整个 机构 进 行 建 模 、 真 的 基 础 上 研 究 了 摆 动 导 杆 机 构 中 摆 杆 的 角 位 移 、 速 度 、 加 速 度 及 其 急 回特 性 , 输 出 了仿 真 仿 角 角 并
图形 , 观 地 揭 示 了摆 动 导 杆 机 构 中 摆 杆 、 块 的 运 动 规 律 和 摆 动 导 杆 机 构 的急 回特 性 . 直 滑
关 键 词 : 摆动导杆机构 ; MAT AB 仿 真 L ; 文 献标 识码 : A
中 图分 类 号 : T 2 3 2 P 7 .
摆动 导杆 机构 应 用广 泛 , 了工 程 中常 见 的应 用 除
定 构件 演化 而来 的. 1 摆动导 杆 机构 的结构 简 图. 图 为
外, 我们还 可 以将其 应 用 到往 复 牵 引 传 动 中 以实 现 机 构 的往 复运 动 , 为往 复牵 引传动 实验提 供实 验装 置 _ . I ] 对摆 动导杆 机构 进行 运 动 学 仿 真 意义 重 大 , 过 仿 真 通
摆动导杆机构转速计算
摆动导杆机构转速计算
摆动导杆机构是一种常见的机械机构,广泛应用于各种机械运动中。
它的转速是指机构在单位时间内转动的圈数或次数,是机构运动的重要参数之一。
下面将介绍如何计算摆动导杆机构的转速。
首先,我们需要了解摆动导杆机构的运动规律。
摆动导杆机构通常由一个固定导杆、一个活动导杆和一个原动机组成。
当原动机转动时,通过连杆将动力传递给活动导杆,使其在一定范围内摆动。
计算摆动导杆机构的转速,需要先了解其运动周期和运动角速度。
一个运动周期是指机构完成一次完整运动所需要的时间,而运动角速度则是机构在单位时间内转动的角度。
假设摆动导杆机构的运动周期为T,运动角速度为ω,那么机构的转速n可以通过以下公式计算:
n = ω / (2π)
其中,π为圆周率,约等于3.14159。
如果要计算摆动导杆机构的实际转速,还需要考虑机构的减速比和齿轮的传动比等因素。
减速比是指减速器中各级齿轮的传动比之和,而齿轮的传动比则是指主动齿轮与从动齿轮的齿数比。
通过上述公式,我们可以计算出摆动导杆机构的转速。
然而,在实际应用中,还需要考虑机构的负载、运动精度、噪音等因素,以及
机构的尺寸、材料、寿命等设计因素,进行综合分析和优化设计。
总之,计算摆动导杆机构的转速是机构设计和运动控制的重要一环。
通过准确的计算和应用合理的设计因素,可以提高机构的工作效率、稳定性和使用寿命,从而提高机械设备的整体性能。
摆动机构的计算
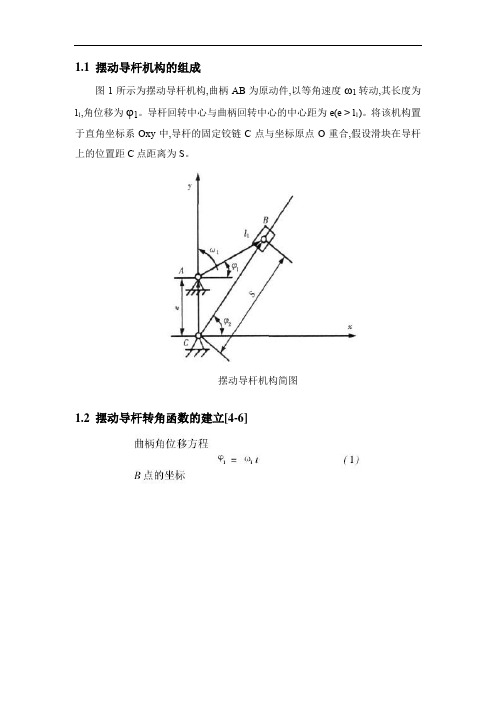
1.1 摆动导杆机构的组成
图1所示为摆动导杆机构,曲柄AB为原动件,以等角速度ω1转动,其长度为l1,角位移为φ1。
导杆回转中心与曲柄回转中心的中心距为e(e > l1)。
将该机构置于直角坐标系Oxy中,导杆的固定铰链C点与坐标原点O重合,假设滑块在导杆上的位置距C点距离为S。
摆动导杆机构简图
1.2 摆动导杆转角函数的建立[4-6]
(7)
式(7)为摆动导杆BC一个周期内转角函数ω2的表达式。
1.3 摆动导杆角速度函数的建立
式(11)为摆动导杆BC一个周期内角速度函数ω2的表达式。
1.4 摆动导杆角加速度函数的建立
式(13)为摆动导杆BC一个周期内角加速度函数ε2的表达式。
摆动导杆机构杆长条件
摆动导杆机构杆长条件一、摆动导杆机构的基本结构和原理摆动导杆机构由导杆、摆杆、连杆和固定杆组成。
导杆通过摆杆与连杆相连,连杆又与固定杆相连。
当导杆绕固定杆旋转时,摆杆和连杆就会发生相应的运动,实现输入旋转运动到输出直线运动的转换。
二、摆动导杆机构杆长的定义和影响摆动导杆机构杆长指的是导杆的长度,记为L。
杆长的选择对机构的运动特性和性能有着重要影响。
1. 运动范围:杆长的不同会导致机构的运动范围不同。
当杆长较短时,机构的运动范围较小;当杆长较长时,机构的运动范围较大。
因此,在实际应用中,需要根据需要选择合适的杆长,以满足机构的运动要求。
2. 运动平稳性:杆长的选择还会影响机构的运动平稳性。
当杆长较短时,机构的运动会比较剧烈,容易产生震动和冲击;当杆长较长时,机构的运动相对平稳。
因此,在设计机构时,需要考虑杆长对运动平稳性的影响,选择合适的杆长以保证机构的工作稳定性。
3. 动力传递效率:杆长的选择还会对机构的动力传递效率产生影响。
一般来说,杆长越短,动力传递效率越高;杆长越长,动力传递效率越低。
因此,在设计机构时,需要根据实际需求选择合适的杆长,以保证动力传递的效率。
4. 结构紧凑性:杆长的选择还会影响机构的结构紧凑性。
当杆长较短时,机构的结构相对紧凑;当杆长较长时,机构的结构相对松散。
因此,在设计机构时,需要根据实际需求选择合适的杆长,以保证机构的结构紧凑性。
三、摆动导杆机构杆长的确定方法确定摆动导杆机构的杆长需要考虑多个因素,包括机构的运动要求、工作环境和结构限制等。
1. 运动要求:根据机构的运动要求确定杆长的范围。
根据机构的运动范围和运动平稳性要求,确定最小和最大杆长。
2. 工作环境:考虑机构的工作环境,包括机构所处的空间限制和工作位置要求等。
根据实际情况,确定机构的杆长范围。
3. 结构限制:考虑机构的结构限制,包括导杆、摆杆和连杆的材料和制造工艺等。
根据结构限制,确定机构的杆长范围。
根据以上几个因素,可以确定摆动导杆机构的杆长范围。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回, 正转↓, 反转↑ 连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授