《机械设计基础》第五版摆动导杆机构设计 2
(完整版)《机械设计基础》答案
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
《机械设计基础》答案
在图中,从给定的条件可知,轮1和轮3的绝对转向相反,已 的值为正, 的值为负,代入上式中,则有
即
于是解得
其值为正,说明H的转向与轮1的转向相同。
5-10 在题5-10图所示机构中,已知 , , , , , , ,求:
(1)当 、 时,
(2)当 时,
键16×80 GB/T 1096-2003
同时可查得键的厚度尺寸
然后根据题10-8中传递的转矩,利用公式(10-26)及表10-10进行验算强度即可
第11章 齿轮传动
11-1
解:利用题中给定的条件可推导出:
11-4
解:本题为设计计算题,按照例题的步骤进行计算即可。
11-6
解:(1) ;(2) ;(3) ;(4)
解:
以踏板为主动件,所以最小传动角为0度。
2-6设计一曲柄摇杆机构。已知摇杆长度 ,摆角 ,摇杆的行程速比变化系数 。(1)用图解法确定其余三杆的尺寸;(2)用式(2-6)和式(2-6)'确定机构最小传动角 (若 ,则应另选铰链A的位置,重新设计)。
解:由K=1.2可得极位夹角
2-7 设计一曲柄滑块机构,如题2-7图所示。已知滑块的行程 ,偏距 ,行程速度变化系数 ,求曲柄和连杆的长度。
解:各偏心质量产生的质径积分别为:
于是不平衡质径积的向量和为:
即应在图示反方向的方位加上质径积 ,回转件才能达到平衡。
第10章 连接
10-4
解:设螺旋副的升角为 ,当量摩擦角为 ,当量摩擦系数用 表示
则
已知 ,则 ,
(1)工作台上升的效率为
(2)稳定上升时加于螺杆上的力矩为
(3)螺杆的导程为
则可得螺杆的转速为:
《机械设计基础》第五版第2章平面连杆机构

t1 (180 ) /
V1 C1C2 t1
C1C2 /(180 )
当曲柄以ω继续转过 φ 2=180-θ 时,摇杆从C1D, 置摆到C2D,所花时间为t2 , 平均速度为V2 ,那么有:
t2 (180 ) /
V2 C1C2 t2
C1C2 /(180 )
2 22
C 3
A
4
定块机构
机械设计基础-第2章平面连杆机构
三、含两个移动副的四杆机构
了解
正弦机构
正弦机构
双转块机构 (十字滑块机构)
双滑块机构
正切机构
机械设计基础-第2章平面连杆机构
缝纫机针杆运 动机构
十字沟槽联轴节
正切机构
椭圆仪
十字沟槽联轴节
机械设计基础-第2章平面连杆机构
四、具有偏心轮的四杆机构
例题
机械设计基础-第2章平面连杆机构
二.急回特性 平面四杆机构的极位 主动件:曲柄 从动件:摇杆
极位:从动件的两 个极限位置
极位夹角θ:从动件处于两个极 位时,曲柄两位置之间的夹角 最大摆角ψ:摇杆往复摆过的 最大角度
机械设计基础-第2章平面连杆机构
急回特性分析
当曲柄以ω逆时针转过 φ1=180°+θ时,摇杆从C2D 位 置 摆 到 C1D , 所 花 时 间 为 t1 , 平均速度为V1,那么有:
特例2 反平行双曲柄机构:对边平行但不相等
应用实例:车门启闭机构
反向双曲柄机构
车门启闭机构
机械设计基础-第2章平面连杆机构
3、双摇杆机构
结构特点:二连架杆均为摇杆 运动变换:摆动摆动
工程应用实例:
港口起重机 飞机起落架 车辆的前轮转向机构 造型机翻箱机构 风扇摇头机构
机械设计基础(第五版)课后习题答案(完整版)_杨可竺、程光蕴、李仲生主编_高等教育出版社.

1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础(第五)课后习题答案(完整版)_杨可竺、程

1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础-(第五版)讲义2[35P][0.99MB]
![机械设计基础-(第五版)讲义2[35P][0.99MB]](https://img.taocdn.com/s3/m/51eb4883680203d8ce2f2413.png)
平行四边形机构(也称平行双曲柄机构)。
两个特性 :
①两曲柄同速同向转动; ②连杆作平动。
2-1 平面四杆机构的基本类型及其应 用
车门开闭机构
2-1 平面四杆机构的基本类型及其应 用
3. 双摇杆机构:两连杆架均为摇杆的四杆机构
应用举例: 港口起重机、飞机起落架、车辆的前轮转向机构
② 导杆机构
曲柄转动导杆机构
曲柄摆动导杆机构
2-1 平面四杆机构的基本类型及其应 用
③ 摇块机构
2
1
3
4
摇块机构
卡车车厢举升机构
2-1 平面四杆机构的基本类型及其应 用
④ 定块机构
2-1 平面四杆机构的基本类型及其应 用
2. 含两个移动副的四杆机构
① 曲柄移动导杆机构(正弦机构)
2-1 平面四杆机构的基本类型及其应 用
2-1 平面四杆机构的基本类型及其应 用
港口起重机
选择连杆上合适的点,轨迹为近似的水平直线
2-1 平面四杆机构的基本类型及其应 用
飞机起落架
2-1 平面四杆机构的基本类型及其应 用
车辆的前轮转向机构
2-1 平面四杆机构的基本类型及其应 用 二、铰链四杆机构的演化
演化常用的方式
①改变运动副类型;
重点哦 !
2-2 平面四杆机构的基本特性
2. 铰链四杆机构类型的判断
1)若不满足杆长和条件,则为双摇杆机构;
2)若满足杆长和条件:
① 取最短杆为机架,得双曲柄机构; ② 取最短杆的邻边杆为机架,得曲柄摇杆机构; ③ 取最短杆的对边杆为机架,得双摇杆机构。
2-2 平面四杆机构的基本特性 二、急回特性
平面连杆机构的缺点
数控机械获奖作品推荐 机械设计基础模块五任务一:设计牛头刨床摆动导杆机构
4/36
教学设计
教学设想
教学环节
在教学过程中为学 生演示形象直观的动画, 采用多种互动方式,激 发学生的学习兴趣,调 动学生的学习热情,使 学生积极主动参与课堂 教学,巧妙的解决本节 课的教学重点和难点, 使学生的自学能力、合 作能力得到锻炼和提高。
共2学时:第1学时+第2学时
(三)其他机构
(四)知识小构
二、平面四杆机构的演化(铰链四杆机构的演化)
取不同构件为机架
(一)曲柄滑块 曲柄滑块机构
导杆机构、摇块机构、定块机构
机构(P162) 1、导杆机构
(二)偏心轮机构 (1)演化过程:在曲柄滑块机构中,将曲柄改为
(P162)
机架时,就演化成导杆机构。
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
29/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
2、摇块机构 (2)应用:
(二)偏心轮机构
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
同学们:检验你们的 时刻到了!
(四)知识小结 与挑战平台
18/36
活动规则
把学生平均分成4个小组,教师提出问题,各小组 抢答,抢答正确得分,抢答错误扣分,分值为5至1 分的题目,总分最高的小组有惊喜。。。。。。
5分
1 2
1分
6
4
5
19/36
11、、搅答拌案器:机搅构拌是器什机么构机是构曲?柄摇杆机构
机械设计基础部分例题答案
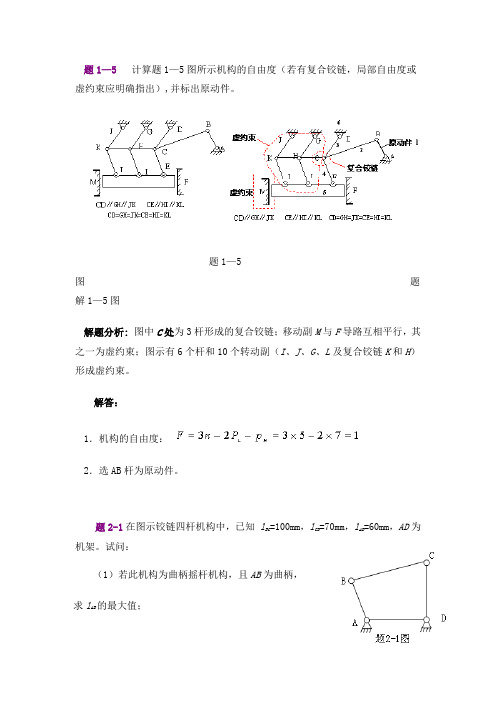
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图题解1—5图解题分析: 图中C处为3杆形成的复合铰链;移动副M与F导路互相平行,其之一为虚约束;图示有6个杆和10个转动副(I、J、G、L及复合铰链K和H)形成虚约束。
解答:1.机构的自由度:2.选AB杆为原动件。
题2-1在图示铰链四杆机构中,已知l BC=100mm,l CD=70mm,l AD=60mm,AD为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB为曲柄,求l AB的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
解题分析:根据铰链四杆机构曲柄存在条件进行计算分析。
在铰链四杆机构中,若满足杆长条件,以最短杆或最短杆相邻的杆为机架,机构则有曲柄,否则无曲柄;若不满足杆长条件,无论取哪个构件为机架,机构均为无曲柄,即为双摇杆机构。
解答:1.因为AD 为机架,AB 为曲柄,故AB 为最短杆,有AD CD BC AB l l l l +≤+,则m m30)1006070(=-+=-+≤BC AD CD AB l l l l故 mm30max =AB l2.因为AD 为机架,AB 及CD 均为曲柄,故AD 杆必为最短杆,有下列两种情况:若BC 为最长杆,则 m m100=<BC AB l l ,且AB CD BC AD l l l l +≤+,则m m90m m )7010060(=-+=-+≥CD BC AD AB l l l l得 m m 100m m 90≤≤AB l若AB 为最长杆,则m m100=>BC AB l l ,且BC CD AB AD l l l l +≤+,故m m110m m )6070100(=-+=-+≤AD CD BC AB l l l l得m m 110m m 100≤≤AB l故m m 90min =AB l3.如果机构尺寸不满足杆长条件,则机构必为双摇杆机构。