数控机械获奖作品推荐 机械设计基础模块五任务一:设计牛头刨床摆动导杆机构
机械原理大作业——牛头刨床
机械原理大作业——牛头刨床大作业,一,平面连杆机构的运动分析题号: 6班级 : 姓名 : 学号 : 同组者 :成绩 :完成时间 :目录题目、原始数据及要求 ..................................................................... .......................1 一平面连杆机构运动分析方程 ..................................................................... . (1)1.1速度计算公式 ..................................................................... .. (2)1.2加速度计算公式 ..................................................................... ..............2 二程序 ..................................................................... (3)2.1计算程序框图 ..................................................................... (3)2.2计算源程序 ..................................................................... .........................4 三 3.1 (一组数据 Lab =200mm)计算结果 (9)3.2运动线图 ..................................................................... . (10)3.3 体会 ..................................................................... .................................... 12 四 4.1(第二组数据 Lab =150mm)计算结果 . (12)4.2 运动线图 ..................................................................... .. (13)4.3 体会 ..................................................................... .................................... 15 五 5.1(第三组数据 Lab =220mm)计算结果 . (16)5.2 运动线图 ..................................................................... (17)5.3 体会 ..................................................................... ...................................... 21 六参考资料 ..................................................................... (21)题目、原始数据及要求:图所示为一牛头刨床(?级机构)。
机械设计基础典型试题和答案
机械设计基础典型试题1一、填空题:(每题2分,共20分)1、设计时凸轮的轮廓曲线取决于_______________________________________。
2、渐开线齿廓形状取决于________大小。
3、普通螺纹的牙型为_______________形。
4、刚性联轴器无补偿__________的能力。
5、当滚子链的链节数为奇数时.接头要用_____________________。
6、阿基米德蜗杆在轴面的齿廓为______________________________。
7、槽轮轮机构常由___________________________________等组成。
8、滚动轴承72211AC中“11”表示___________________9、斜齿轮的____________参数为标准参数.____________参数为计算参数。
10、所谓高副就是指两构件的直接接触为_______________________。
二、判断题:(每题5分,共25分)1.()根据曲柄存在的条件已判定铰接四杆机构中存在曲柄.则此机构是不会成为双摇杆机构的。
2.()普通平键联接是依靠键的上下两面的摩擦力来传递扭距的。
3.()三角形螺纹具有较好的自锁性能。
螺纹之间的摩擦力及支承面之间的摩擦力都能阻止螺母的松脱。
所以就是在振动及交变载荷作用下.也不需要防松。
4.()m.d.ha* c*都是标准值的齿轮是标准齿轮。
5.()渐开线标准直齿圆柱齿轮传动.由于安装不准确.产生了中心距误差.但其传动比的大小仍保持不变。
三、简答题:(20分)1、简述滚动轴承的3类、6类、7类的类型名称及应用特点。
2、分析比较带传动的弹性滑动和打滑现象。
四、综合题(1 题2分.2题8分.3题5分.共15分)已知一四杆机构各杆长为AB = 50㎜ .BC = 90㎜ .CD = 80㎜.AD = 100 ㎜。
1、以何杆为机架杆时可得到双曲柄机构?2、若以AD杆为机架杆.此机构为什么机构?用作图法求作极位夹角.并计算行程速比系数K。
机械原理课程设计牛头刨床(完整图纸)
机械原理课程设计说明书系部名称: 机电系专业班级: 04机制三班姓名:学号: 0405110057目录概述 (3)设计项目...............................1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容·······························1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述一、机构机械原理课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。
其基本目的在于:(1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。
(2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。
(3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。
(4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。
二、机械原理课程设计的任务:机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。
数控机械获奖作品推荐 设计牛头刨床摆动导杆机构

的行程H= 40mm
。
5、缝纫机的脚踏板机构采用的是 曲柄摇杆 机构,
以 摇杆
为主动。
设计牛头刨床摆动导杆机构
知识回顾
6、曲柄滑块机构中若存在死点位置,主动件为( C )?
A.曲柄 B.连杆 C.滑块 D.机架
7、判断下图所示铰链四杆机构的类型,如何演化成双
曲柄机构、双摇杆机构?
8、已知机构行程速比系数
相关知识
死点的利用
快速夹具
飞机起落架 设计牛头刨床摆动导杆机构
相关知识
三、平面四杆机构的设计 (一)按给定的行程速比变化系数K设计四杆机构
常用设计步骤 1.按实际需要给定行程速比K的数值 2.算出极位夹角θ 3.根据机构在极限位置时的几何关系,结合有关辅助条件
来确定机构运动简图的尺寸参数。
设计牛头刨床摆动导杆机构
机械设计基础
导入任务 任务分析
观察牛头刨床的切削过程 1)了解平面四杆机构的基本形式 及其演化形式; 2)掌握平面四杆机构的工作特性 并能根据机构的工作要求设计平面四 杆机构。 牛头刨床摆动导杆机构
能根思据考机构的工作要求设计平面 四杆如机何构进。行摆动导杆机构的设计?
设计牛头刨床摆动导杆机构
相关知识 一、平面四杆机构的基本形式及其演化
移动导杆机构
应用:手动抽水机
手动压水机 设计牛头刨床摆动导杆机构
相关知识
小结:导杆机构的演化
曲 柄 滑 块 机 构
转
曲
移
动
柄
动
导
摇
导
杆
块
杆
机
机
机
构
构
构
摆 动 导 杆 机 构
取不同构件作机架,可以得到不同的机构
教改项目-《机械设计基础》设计型作业模板及评分标准-10
作业提交日期
年月日
得分
评阅人
作业章节及名称 机械设计基础(上) 大作业
滚动轴承组合的轴向位置调整;(3 分) 滚动轴承的润滑与密封结构设计;(4 分) 轴承装拆动画演示。(4 分)
设计产品采用的软件名称
轴
滚动轴承的名称及类型代号
承
(2 分)
的
滚动轴承选用分析(式分析(4 分)
轴
轴承
承寿
滚动轴承组合轴剖面结构图(5 分)
属命
轴承组合受力简图(4 分)
东华大学工业设计 2011 级,2013 年
《机械设计基础》课程作业
撰稿:唐林
机构设计型作业
作业提交日期
年月日
得分
评阅人
作业章节及名称 CH03(平面连杆机构)
评分要点 (章节学习要求)
(1)机构准确实现产品所需的功能 (2)分析所用机构类型 (3)平面机构运动简图 (4)机构自由度计算 (5)机构运动特性分析 (6)机构力学特性分析
(1) 设计产品所用软件的文件格式,即源文件; (2) 产品三维模型图及其动画文件(avi 文件格式,要求透视出所用机构原型); (3) 设计文档,按产品设计文档要求填写设计内容(.doc 文件格式)。
3/5
东华大学工业设计 2011 级,2013 年
《机械设计基础》课程作业
撰稿:唐林
机构组合+零件设计大作业
分析弹性滑动对从动带轮转速的影响
机构特性分析(包 括运动和传力性能
分析)
(设:滑动率 ε = 0.02)(5 分) 考虑弹性滑动影响时,从动带轮的基准直径值 dd2 及其转速值 n2; 不考虑弹性滑动影响时,从动带轮的基准直径值 dd2 及其转速值 n2;
机械设计基础课程设计任务书(适用于工业设计专业)
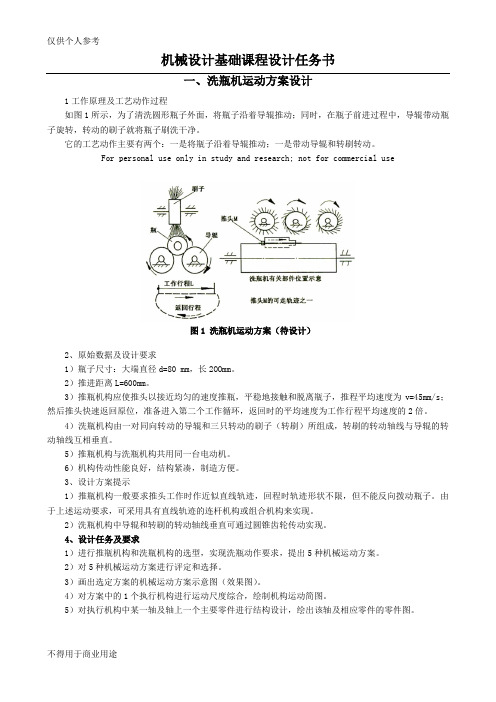
机械设计基础课程设计任务书一、洗瓶机运动方案设计1工作原理及工艺动作过程如图1所示,为了清洗圆形瓶子外面,将瓶子沿着导辊推动;同时,在瓶子前进过程中,导辊带动瓶子旋转,转动的刷子就将瓶子刷洗干净。
它的工艺动作主要有两个:一是将瓶子沿着导辊推动;一是带动导辊和转刷转动。
For personal use only in study and research; not for commercial use图1 洗瓶机运动方案(待设计)2、原始数据及设计要求1)瓶子尺寸:大端直径d=80 mm,长2OOmm。
2)推进距离L=600mm。
3)推瓶机构应使推头以接近均匀的速度推瓶,平稳地接触和脱离瓶子,推程平均速度为v=45mm/s;然后推头快速返回原位,准备进入第二个工作循环,返回时的平均速度为工作行程平均速度的2倍。
4)洗瓶机构由一对同向转动的导辊和三只转动的刷子(转刷)所组成,转刷的转动轴线与导辊的转动轴线互相垂直。
5)推瓶机构与洗瓶机构共用同一台电动机。
6)机构传动性能良好,结构紧凑,制造方便。
3、设计方案提示1)推瓶机构一般要求推头工作时作近似直线轨迹,回程时轨迹形状不限,但不能反向拨动瓶子。
由于上述运动要求,可采用具有直线轨迹的连杆机构或组合机构来实现。
2)洗瓶机构中导辊和转刷的转动轴线垂直可通过圆锥齿轮传动实现。
4、设计任务及要求1)进行推瓶机构和洗瓶机构的选型,实现洗瓶动作要求,提出5种机械运动方案。
2)对5种机械运动方案进行评定和选择。
3)画出选定方案的机械运动方案示意图(效果图)。
4)对方案中的1个执行机构进行运动尺度综合,绘制机构运动简图。
5)对执行机构中某一轴及轴上一个主要零件进行结构设计,绘出该轴及相应零件的零件图。
6)完成图纸4张:机械运动方案效果图1张(2号图纸,用计算机绘图),机构尺度综合图1张(3号图纸,用手工绘图),轴和轴上主要零件的零件图各1张(3号图纸,1张用计算机绘图,1张用手工绘图)。
机械牛头刨床连杆机构结构优化设计毕业论文

机械牛头刨床连杆机构结构优化设计毕业论文机械牛头刨床连杆机构结构优化设计摘要本文主要针对牛头创床连杆机构结构的优化,主要以六杆机构为例,且以切削过程中速度平稳这一问题展开的.牛头创床在切削过程中要求速度平稳,这样可得到较好的工件质量。
回程时,由于不切削工件,返回时的速度较大,有急回特性的特点。
传统的设计方法是选择较大的导杆摆角和合适的导路位置,这样急回特性明显,传动性能也得到了改善,机械效率也得到了提高。
本文是在国内外研究的背景之下,通过观察牛头创床六杆机构的整体结构,了解该机构的整体运动状态,利用动力学软件ADAMS对其进行约束。
利用虚拟样机技术实现整个机构的仿真。
仿真出来的结果与理论数据作对比,对比验证试验仿真的可行性。
通过优化,发现优化后的速度接近实际的切削速度,速度相对于优化前的速度减小,从而实现创头在切削工件时速度平稳的要求。
优化后速度得到了平稳,加速度峰值减小了,提高了工件的寿命,急回特性明显增加。
关键词:机械牛头刨床;连杆机构;仿真;ADAMS;优化设计Structural Optimization Design of Connecting Mechanismof MechanicalAbstractIn this paper, we mainly aim at the optimization of the structure of the connecting rod mechanism of the Ngau Tau bed, which is mainly based on the six-bar mechanism, and the speed of the cutting process is very smooth, so that the speed is stable in the cutting process. The quality of the workpiece. Return time, because the workpiece is not cut, the return of the larger speed, there are characteristics of the characteristics of emergency. The traditional design method is to choose a larger pole swing angle and the appropriate guide position, so that the rapid return characteristics of the obvious, transmission performance has also been improved, mechanical efficiency has also been improved.In this paper, under the background of domestic and foreign research, by observing the overall structure of the Ngau Tau bed six-bar mechanism, we understand the overall motion of the mechanism and use the dynamic software ADAMS to constrain it. Realize the simulation of the whole organization with virtual prototyping technology. The simulation results are compared with the theoretical data, and the feasibility of the simulation is verified. Through optimization, it is found that the optimized speed is close to the actual cuttingspeed, and the speed is reduced with respect to the speed before optimization, so as to realize the requirement of smooth cutting of the workpiece. After optimization, the velocity is smooth, the acceleration peak is reduced, the life of the workpiece is improved, and the rapid return characteristic is obviously increased.Key word s: Mechanical bulldozer planer; Linkage mechanism; Simulation; ADAMS; Optimization design目录摘要 (I)Abstract (II)目录 (III)第一章绪论 (1)1.1论文的研究背景 (1)1.2研究目的及意义 (2)1.3国内外相关领域的硏究现状 (3)第二章总体结构 (5)2.1牛头创床的结构组成 (5)2.2牛头刨床的工作原理 (5)2.3 牛头刨床的连杆机构 (5)2.4 牛头刨床的自由度分析 (6)2.5 滑块速度的计算 (7)第三章牛头刨床的系统 (8)3.1主轴箱 (8)3.1.1 主轴箱的电动机选择 (8)3.1.2电动机规格的选取 (8)3.1.3主轴箱上主传动轴设计 (9)3.1.4 1308调心滚子轴承设计 (11)3.2 牛头刨床的结构设计 (12)3.2.1 床身 (12)3.2.2 主轴箱 (13)3.2.3 摇臂机构 (13)3.2.4 滑枕 (14)3.2.5 工作台 (14)3.3传动机构组成及传动器工作原理 (14)第四章基于ADAMS的牛头创床连杆机构的运 (16)动仿真 (16)4.1ADAMS软件的简介 (16)4.2参数化建模 (16)4.2.1创建设计变量 (16)4.2.2 坐标点参数化 (17)4.2.3 模型仿真 (17)4.3 机构参数优化 (17)4.3.1优化目标的选取 (17)4.3.2 优化变量的确定 (17)4.3.2约束条件约束条件的建立 (18)结论与展望 (19)致谢 (20)参考文献 (21)第一章绪论1.1论文的研究背景我国创床事业的发展经历了漫长的岁月变化,尽管经历了无数次的失败,通过国人的不懈努力,创床事业还是在工业领域中崭露头角。
牛头刨床六杆机构及创新机构说明书

牛头刨床六杆机构及创新机构说明书作品名称:牛头刨床六杆机构及创新机构指导老师:完成时间:2013.7.5小组成员:牛头刨床六杆机构及创新机构说明书机构工程应用背景构件间只用低副连接的机构是连杆机构。
而六杆机构是连杆机构的一种类型,所以其具有连杆机构的普遍优缺点。
六杆机构中低副是面接触,耐磨损;加上转动副和移动副的接触表面是圆柱面和平面,制造简便,易于获得较高的制造精度。
因此,六杆机构在各种机械和仪器中获得广泛应用。
而六杆机构的缺点是:低副中存在间隙,数目较多的低副会引起运动误差,而且它的设计比较复杂,不易精确地复杂的运动。
近年来,随着六杆机构设计方法的发展,电子计算机的普及应用以及有关设计软件的开发,六杆机构的设计速度和设计精度有了较大的提高,而且在满足运动学要求的同时,还可考虑到动力学特性。
尤其是微电子技术及自动控制技术的引入,多自由度六杆机构的采用,使六杆机构的结构和设计大为简化,使用范围更为广泛。
1)牛头刨床机构一、分析建模过程图示六杆机构,已知l1=0.12m, l3=l4=0.6m, l6=0.38m;曲柄1逆时针方向等速转动,转速n1=172r/min,构件质量m3=20kg, m4=15kg, m5=62kg,构件1,2的质量忽略不计,质心位置lCS3=0.3m, lCS4=0.3m, 质心S5在点E,构件3,4绕质心的转动惯量JS3=0.11kg·m2,JS4=0.18kg·m2,该机构在工作行程时滑块5受与行程相反的阻力Fx=110N。
1 设置合适的网格尺寸和网格间距Size:X=750mm,Y=1000mmSpacing:X=10mm,Y=10mm2 选择合适的视图位置3 创建曲柄1 在ADAMS/View零件库中选择link图标Links: new part Length=120mm Width=20mm Depth=20mm4创建摇杆3 在ADAMS/View零件库中选择link图标Links: new part Length=600mm Width=20mm Depth=20mm5创建连杆4 在ADAMS/View零件库中选择link图标Link: new part Length=600mm Width=20mm Depth=20mm6创建滑块2 在ADAMS/View零件库中选择link图标Box: new part Length=60mm Width=30mm Depth=40mm7创建滑块5 在ADAMS/View零件库中选择link图标Box: new part Length=60mm Width=40mm Depth=30mm8 创建机架6 在ADAMS/View零件库中选择box图标Box: on ground Length=?Mm Width=?Mm Depth=?mm9曲柄1(Part_3)质量、转动惯量修改在Part_2上右击鼠标 Mass=1.0E-11=0kg10滑块2(part_6) 质量、转动惯量修改在Part_6(Link)上右击鼠标 Mass=1.0E-11=0kg11摇杆3(part_4) 质量、转动惯量修改在Part_4(Link)上右击鼠标 Mass=20kg12连杆3(part_5) 质量、转动惯量修改在Part_5(Link)上右击鼠标 Mass=15kg13滑块5(part_7) 质量修改在Part_7(Box)上右击鼠标 Mass=62kg14为建立移动副在滑块5创建Marker在ADAMS/View零件库中选择MARKER点图标,左击滑块PART_7,再点击点PART_7.cm,得到Marker_16。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4/36
教学设计
教学设想
教学环节
在教学过程中为学 生演示形象直观的动画, 采用多种互动方式,激 发学生的学习兴趣,调 动学生的学习热情,使 学生积极主动参与课堂 教学,巧妙的解决本节 课的教学重点和难点, 使学生的自学能力、合 作能力得到锻炼和提高。
共2学时:第1学时+第2学时
(三)其他机构
(四)知识小构
二、平面四杆机构的演化(铰链四杆机构的演化)
取不同构件为机架
(一)曲柄滑块 曲柄滑块机构
导杆机构、摇块机构、定块机构
机构(P162) 1、导杆机构
(二)偏心轮机构 (1)演化过程:在曲柄滑块机构中,将曲柄改为
(P162)
机架时,就演化成导杆机构。
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
29/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
2、摇块机构 (2)应用:
(二)偏心轮机构
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
同学们:检验你们的 时刻到了!
(四)知识小结 与挑战平台
18/36
活动规则
把学生平均分成4个小组,教师提出问题,各小组 抢答,抢答正确得分,抢答错误扣分,分值为5至1 分的题目,总分最高的小组有惊喜。。。。。。
5分
1 2
1分
6
4
5
19/36
11、、搅答拌案器:机搅构拌是器什机么构机是构曲?柄摇杆机构
(四)知识小结 与挑战平台
9/36
应用:汽车前窗刮雨器运转机构
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成
(P160)
1、曲柄摇杆机构(P161) (2)当摇杆为主动件时,可将摇杆的往复摆动
转变为曲柄的整周转动。
(二)铰链四杆机 构的分类(P161)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
10/36
应用:缝纫机驱动机构
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成
(P160)
2、双曲柄机构(P162)
定义:在铰链四杆机构中,如果两个连架杆均 为曲柄。
(二)铰链四杆机 构的分类(P162)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
11/36
点以上图片动画演示
一、平面四杆机构的基本形式
2、双曲柄机构(P162) (2)等长双曲柄机构
① 平行四边形机构:连杆与机架的长度相 等且两个曲柄长度相等(两曲柄的转向相同且 角速度相等)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
13/35
应用:天平机构
超链接视频
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成
2、双曲柄机构(P162) (2)等长双曲柄机构
(四)知识小结 与挑战平台
31/36
二、平面四杆机构的演化(铰链四杆机构的演化)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
(一)曲柄滑块
机构(P162) 3、定块机构
(二)偏心轮机构
(2)应用:
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
手压抽水机
32/36
二、平面四杆机构的演化知识小结(重点+难点)
1、曲柄摇杆机构
2、双摇杆机构
3、双曲柄机构:
(1)不等长双曲柄机构(双曲柄机构)
(2)等长双曲柄机构:①平行四边形机构
②反向平行双曲柄机构
一、平面四杆机构的基本形式挑战平台
(一)铰链四杆机 构的定义与组成
(P160)
(二)铰链四杆机构 的分类(P160-161)
(三)铰链四杆机构 的特点(P160-161)
(四)知识小结 与挑战平台
曲柄滑块机构
应用: 插床机构
转动导杆机构
27/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
1、导杆机构 (2)分类及应用:② 摆动导杆机构
(二)偏心轮机构 (P162)
(三)其他机构 (P164)
一、平面四杆机构的基本形式知识小结
(一)铰链四杆机 构的定义与组成
(P160)
一、平面四杆机构的基本形式 (一)铰链四杆机构的定义及组成(P160)(难点)
(二)铰链四杆机 构的分类
(P160-161)
(三)铰链四杆机 构的特点
(P160-161)
(四)知识小结 与挑战平台
17/36
(二)铰链四杆机构的分类及特点(P161)(重点+难点)
(P160)
②反向平行双曲柄机构:连杆与机架的长度
相等且两个曲柄长度相等(两曲柄的转向相反
(二)铰链四杆机 且角速度不等)
构的分类(P162)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
14/35
应用:汽车车门启闭机构
超链接视频
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成
(P160)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
8/36
点以上图片动画演示
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成
(P160)
1、曲柄摇杆机构(P161)
(1)当曲柄为主动件时,可将曲柄的连续转动 转变为摇杆的往复摆动。
(二)铰链四杆机 构的分类(P161)
(三)铰链四杆机 构的特点
(四)知识小结 与挑战平台
曲柄滑块机构
应用:牛头 刨床主机构
摆动导杆机构
28/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
(二)偏心轮机构
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
2、摇块机构 (1)演化过程:在曲柄滑块机构中,当将连杆改
为机架时,就演化成摇块机构。
(三)其他机构 (P164)
(四)知识小结 与挑战平台
26/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
1、导杆机构 (2)分类及应用:① 转动导杆机构
(二)偏心轮机构
(P162)
(三)其他机构 (P164)
一 组织教学(1′+1′) 二 引入新课(2′+2′) 三 讲授新课(20′+20′) 四 课堂小结(3′+4′) 五 挑战平台(19′+17′) 六 作业布置( 1′)
任务引入
任务 牛头刨床横向进给
1
的机构采用了哪种
类型机构?
5/36
任务分析
任务1:如何判断牛头刨床的横向进给机构
一、平面四杆机构的基本形式
(三)铰链四杆机 构的特点
(P161-162)
(四)知识小结 与挑战平台
16/36
1动复、2变3将摇变摆、、曲为主杆换动双双柄周动的为变曲摇摇期摇往摇换柄杆杆性杆复杆为机机机的的摆的曲构构构变往动往柄特特特角复。复的点点点速摆摆连:::度动动续能两既转,,回将个能动经又转等连将。连能运角架曲杆将动速杆柄转摇。度均的变杆转为整为的动摇周从往转杆转动,
(一)曲柄滑块 机构(P162)
曲柄摇杆机构
(二)偏心轮机构 (P162)
(三)其他机构
1.曲柄滑块机构
(四)知识小结 与挑战平台
33/36
3.其他机构 3.1转动导杆机构 3.2摆动导杆机构
2.偏心轮机构
3.其他机构 3.3摇块机构 3.4定块机构
1、答自案动:送自料动机送构料应机用构的应是用什的么是机曲构柄?滑块机构 22、、答插案床:的插床主的运主动运机动构机应构应用用的的是是什转么动机导构杆机?构
二、平面四杆机构的演化
6/36
连杆
铰链
一、平面四杆机构的基本形式
(一)铰链四杆机 构的定义与组成 (P160)
(二)铰链四杆机 构的分类
1、构连件杆组机成构:构件间只有低副连接的机构。 12、、机平面架连-杆固机定构不:各动构的件构的件运2 动轨迹都在一个 2平、面连或者杆在-几不个与平机行架的直平接面相上连的的连构杆件机4。构。 33、、连平架面杆四-杆与机机构架:相由连四的个构构件件1组、成3。的平面连 4杆、机曲构。柄-可回转360°的连架杆。 54、、摇铰链杆四-杆只机能构在:一当定平角面度四内杆摆机动构的中连的架运杆动。 副都是转动副时。
34/36
3、、答颚案式:破颚碎式机破碎应机用应了用什了么偏机心构轮机?构 44、、答牛案头:刨牛床头刨的床主的运主动运机动构机构应应用用了了什摆么动机导杆构机?构
组成;
机构类型的分析能力;
2、掌握铰链四杆机构的 2、培养学生正确选择和应
类型、演化及应用。
用铰链四杆机构解决问
题的能力;
3/36
3、培养学生自学能力、创 新能力、合作能力。
1、培养学生团结协作的 精神,激发学生的学 习兴趣;
2、培养学生坚韧不拔的 品质。
教学 重点与难点
一 教学重点:铰 链四杆机构的 类型及应用
3、双摇杆机构(P162)
定义:在铰链四杆机构中,如果两个连架杆均 为摇杆。