车载移动立体测量系统检校及精度分析
gnss测量技术论文
gnss测量技术论文GNSS测量是用接收机与天线组成的测量系统,店铺整理了gnss测量技术论文,有兴趣的亲可以来阅读一下!gnss测量技术论文篇一GNSS测量技术在城市测量中的应用摘要:GNSS城市测量技术内容主要包括城市CORS系统建设、城市GNSS网建设、城市GNSS RTK测量、城市GNSS高程测量等,本文主要就这几方面的技术应用作了简要应用分析。
关键词:GNSS;CORS系统;控制网;RTK测量;高程测量Abstract: GNSS measurement technology mainly includes the construction of city, city CORS city GNSS network construction, city, city GNSS RTK measurement of GNSS height measurement, this paper focuses on several aspects of this technology are briefly applied analysis.Key words: GNSS; CORS system; control network; RTK measurement; height measurement中图分类号:P224全球导航卫星系统(GNSS)技术的应用,导致传统测量的布网方法、作业手段和内外作业程序发生了根本性的变革,为城市测量提供了一种崭新的技术手段和方法。
全球导航定位系统具有全球性、全天候、高效率、多功能、高精度的特点。
在用于大地定位时,测站间不要求互相通视,无需造标,不受天气条件影响。
一次观测,可以获得测站点的三维坐标。
卫星定位城市测量技术内容包括城市CORS系统建设、城市GNSS网建设、城市GNSS RTK测量、城市GNSS高程测量等,适用于城市各等级控制测量、工程测量、变形测量和地形测量等。
测量对中杆检校的实用方法探讨
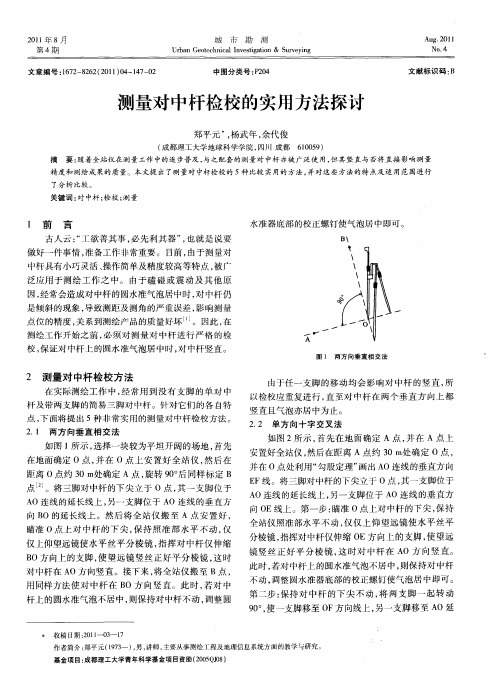
由于任 一 支脚 的移 动 均会 影 响对 中杆 的 竖 直 , 所 以检校 应重 复进 行 , 至 对 中杆 在 两 个 垂 直方 向上 都 直 竖 直且 气泡 亦居 中为 止 。
2 2 单方 向十 字交 叉法 .
如 图 2所 示 , 先 在地 面 确 定 A点 , 在 A 点上 首 并
21 0 1年 8月 第4 期
文 章 编 号 :6 2 8 6 (0 1 0 — 4 — 2 17 — 22 2 1 )4 17 0
城
市
勘
测
Au 2 g. 011 No 4 .
Ur a e tc nc lI v siain & S r e i g b n G o e h ia n e t t g o u v yn
瞄准 O点 上 对 中杆 的 下尖 , 持 照 准 部 水 平 不 动 , 保 仅
向O E线 上 。第 一 步 : 瞄准 O点上对 中杆 的下 尖 , 持 保 全 站仪 照准 部水 平 不 动 , 仅 上仰 望 远 镜 使水 平 丝平 仅
仅上仰望远镜使水平丝平分棱镜 , 指挥对 中杆仅伸缩 B O方 向上的支脚 , 使望远镜竖丝正好平分棱镜 , 这时
精度和测绘成果的质量。本文提 出了测量对 中杆检校的 5种比较 实用的方法 , 并对这些 方法的特点及 适用 范围进行
了分 析 比 较 。
关键 词 : 中杆 ; 对 检校 ; 测量
l 前
言
水 准 器底部 的校 正螺 钉使气 泡居 中即可 。
B|
古 人 云 :工 欲善 其 事 , “ 必先 利 其 器 ” 也 就是 说 要 , 做好 一 件事情 , 准备工 作非 常重 要 。 目前 , 由于i 量对 贝 4
机载激光雷达测量系统解析ppt课件
LIDAR:AeroScan
INSAR:Star-3i
主要技术 参数
飞行高度:8000英尺; 频率:1500HZ; 带宽:1.8km; 4m点间距;
飞行高度:20000英尺; 频率:15000HZ; 带宽:8km; 5m间距;
主要 优点
垂直方向精度±15cm; 小区域及走廊区域最为理想;
非常适合植被覆盖和裸露区的真 实DEM提取; 扫描角内提供大范围扫描;
高精度高空间分辨率的森林或山区真实数字地面 模型 ③ 基本不需要地面控制点,地形数据采集速度快 ④ 作业安全 ⑤ 作业周期快,易于更新 ⑥ 时效性强 ⑦ 将信息获取、信息处理及应用技术纳入同一系统 中,有利于提高自动化高速化程度
4 机载激光雷达与机载InSAR的比较
4 机载激光雷达与机载InSAR的比较
6 工作流程及内业数据处理
飞行计划
GPS数据质量检查
系统参数测定和检校
航迹计算 激光脚点位置计算
外业数据采集
激光点云生成 分割
野外初步质量分析和控制
否 是
数据内业后处理
自动分类 内部QA/QC
手工分类 最后QA/QC
小结
1. 机载激光雷达测量的系统组成、激光扫描测距的 原理、动态GNSS定位、INS姿态测量系统、 GPS确定姿态的基本原理和方法
机载激光雷达测量系统的组成单元
测距单元
控制、监测、记 录单元
差分GPS 惯性测量单元
扫描仪
激光脚点 扫描方向
扫描带宽
激光雷达测距系统
•定义
包括:激光脉冲测距系统、光电扫描仪 及控制处理系统 原YA理G 激:光脉器冲是测以钇时铝测石距榴和石晶激体光为相基位质差的一测种距固
体 激光器 。钇铝石榴石的化学式是Y3 Al5 O15 ,简
CCD摄像机的误差及其检校
X
X
由此,只要检测出直线的行抖动,即可考虑在 拟合边缘直线时校正,从而提高系统的测量精度。
图 1 平面上点的分布 Fig.1 Distribution of points on plane
图 2 x0、y0 初值确定 Fig.2 Setting initial values of x0 and y0
1
∆ x=k1(x-x0) , ∆ y=k1(y-y0) 。因此可得:
x + ∆x + l1 x + l 2 y + l3 = 0 l 7 x + l8 y + 1 l x + l 5 y + l6 y + ∆x + 4 = 0 l 7 x + l8 y + 1
(2)
2004-05-08; 修改稿日期 2004-07-10 雷玉堂(1932-) ,男。教授。主要研究方向:光电技术与安全防范。E-mail: itoe@
收稿日期 作者简介
2 CCD 摄像机的光学误差
由于 CCD 摄像机的物镜与普通摄影物镜无异, 这部分误差结果可直接应用。 对畸变差的改正,可采用二次多项式拟合法。 畸变差中的线性部分可用二维 DLT(直接线性变 换)算法改正。下面主要讨论非线性误差的改正。 一般非线性的物镜畸变差可表示如下:
∆x = ( x − x 0 (k 1 r 2 + k 3 r 4 + k 3 r 6 Κ Κ )
等因素造成。
1 概 述
在利用面阵 CCD 摄像机进行实时检测的系统 中,CCD 摄像机所产生的误差是系统中的主要误 差,它影响系统的测量精度。必须对 CCD 摄像机 所产生的误差进行分析与检校,以便对系统的精度 进行评价。 CCD 摄像机所产生的误差主要由它的光 学成像镜头, CCD 器件本身的质量以及图像采集装 置(含图像采集卡等)共同产生,一般分为光学误 差、机械误差和电学误差。 光学误差主要是指影响影像几何精度的 CCD 摄像机的光学镜头所产生的镜头畸变差。它包括径 向畸变差和切向畸变差。镜头的这种畸变差在影像 上一般表现为中心小而周边较大。 机械误差主要是指 CCD 器件质量不好,即 CCD 机械加工安装时造成的 CCD 面阵的几何误 差,即像元排列不规则而使影像产生的几何误差。 它包括像素定位不准,行列不直及相互不垂直等误 差。此外还有 CCD 不同的像元对相同的光强信号 转换得到的灰度值有差异的像元敏感不均匀性误 差。随着现代加工工艺水平的提高,这种误差较其 它误差要小的多。 电学误差主要是指 CCD 在光电信号转换,电 荷在势阱中的传递以及 A/D 转换时所产生的影像 几何误差。它主要包括行同步误差、场同步误差和 像素采样误差。主要原因是光电信号转换不完全、 信号传递滞后以及 CCD 驱动电路电压及频率不稳
LiDAR

各部件的组成:
1) 激光测量装置。它的数据发射量和功率非常大, 每秒最多可发射12. 5万个激 光点, 测量距离为离地面30-2500m。测量到地面的激光点密度最高可达65个 /m2, 正常飞行高度情况下(航高800m),在植被比较茂密的地区也有一定量 的激光点射到地面上。可利用专业软件对数据进行处理辨别出地面点或是植被 点等。 2) GPS接收机。通过接收卫星的数据, 实时精确测定出设备的空间位置,再通 过后处理技术与地面基站进行差分计算,精确求得飞行轨迹。 3) 惯性测量装置(IMU)。由装置将接收到的GPS数据, 经过处理, 求得飞行运 动的轨迹, 根据轨迹的几何关系及变量参数, 推算出未来的空中位置, 从而 测算出该测量系统的实时和将来的空间向量。由于在飞行过程中,飞机会受到 一些外界因素的影响,此时,实际轨迹由惯导装置测定, 通过动力装置调整, 使飞行精确按原轨迹运动,所以该系统也称作为惯导系统。 4) 数码相机。采用高分辨率数码相机(2200万像素),在1000m的飞行高度,影像 地面分辨可达到10cm,可以获得高清晰的影像。通过影像与激光点数据整合 处理后,可以得到依比例、带坐标和高程的正射影像图。在不同航高下,可以 按需要得到1:250-1:10000不同比例尺的正射影像。 5) 其他相关设备。其他相关装备有飞机、计算机、专业数据处理软件等。
机载激光雷达在滑坡研究中的应用
滑坡是一种严重危害生命财产安全的重大地质灾害。对滑坡稳定性分析以及滑坡发生后规 模和危害性的评估是滑坡研究中的重要课题。利用机载激光雷达数据,可以为这两方面的 研究提供有力的手段。 利用LiDAR数据进行滑坡稳定性评价最早出现在Dietrich et al.(2001)的研究中,不过他 的研究主要是为他提出的滑坡稳定性评价模型SHALSTAB做验证。此后,Chang et al.(2005)采用航空摄影测量、机载LiDAR和野外调查相结合的方法,对台湾1999年9 月份集集地震引发的九份二山(Jiufengershan)滑坡地质和地貌学特征进行了深入的研究。 他们利用地震发生两年半后采集到的该地区机载激光雷达数据计算滑坡规模(面积和土石 方量),并揭示了滑坡形态结构。他们还在LiDAR数据上圈定出滑动面上的变形构造如断 裂陡坎和褶皱,并根据地震前后的DEM数据画出了等厚度图。 针对西雅图地区滑坡频发的问题,Schulz(2007)利用机载LiDAR数据和该地区历次的滑 坡记录,对滑坡稳定性进行了分析。作者认为,由于该地区森林密布,传统的利用航空影 像解译得到的地质、地貌资料不能反映该地区的真实地貌。作者利用LiDAR数据圈定出的 滑坡数量是过去用航空影像圈定的滑坡数量的四倍之多!通过对1308个历史滑坡数据的分 析,发现它们基本上集中在由LiDAR数据圈定的滑坡内。同时作者发现所圈定的滑坡和地 层的关系并不密切。这些结果对西雅图滑坡稳定性的评价有非常重要的意义。 Roering et al.(2009)利用差分干涉测量(DInSAR)、机载LiDAR和历史航空影像对北 加利福尼亚州大型、缓慢滑动的滑坡进行研究。他们利用ALOS干涉数据圈定了5个大型 (长度大于1km)活动滑坡,并利用1964年的航空影像和2006年的LiDAR原始机载数据 (未经滤波),对森林位移进行变化检测,结合DInSAR,定量计算移动速度、每年的土 石方量和每年地表的剥蚀速度。
无人机倾斜摄影测量技术的应用与精度分析

无人机倾斜摄影测量技术的应用与精度分析摘要:科技的发展,各领域的技术水平逐渐提高,信息技术应用更加广泛的今天,随着无人机设备的应用范围不断扩大以及无人机产业的成型,以无人机为主要测量设备的测量系统逐步成为了测绘领域的主流。
关键词:无人机;倾斜摄影测量技术;应用;精度引言无人机倾斜摄影测量技术通过无人机低空多位镜头摄影,从不同角度进行数据采集,获取高清晰度的立体影像数据,通过处理软件自动生成三维地理信息模型,快速实现地理信息的获取,进一步扩大了无人机测绘的应用范围,使其在测绘、国土、矿山、林业、电力、数字城市等领域得到了广泛应用。
1应用优势(1)突破了传统航测单相机只能从垂直角度拍摄获取正射影像的局限,通过在同一飞行平台上搭载多台影像传感器,同时从垂直、倾斜多个不同角度采集带有空间信息的真实影像,以获取更加全面的地物纹理细节,更加真实地反映地物的实际情况。
(2)通过无人机搭载倾斜摄影相机进行地形测绘,配合自动化的影像匹配、建模系统可以减少人工干预,提升工作效率。
(3)节约人力、效率高,能极大地缩短测绘外业的协同工作,解决了由于天气等外因造成的工作延误,把原本大量的外业工作转变成内业工作,极大地缩短了测量人员的劳动时间,降低了外业劳动强度。
(4)倾斜影像能为用户提供丰富的地理信息产品,实现二三维的数据叠加和展示,为相关地籍管理信息系统提供辅助决策分析。
2无人机倾斜摄影测量技术的应用与精度2.1做好测量准备工作以某工程为例:①基于路段实际情况制订对应的摄影测量方案;②对设备、设施的性能指标进行全面检查;③对无人机搭载相机进行校准处理。
在该工程项目中,山地面积占整体面积的80%左右,且大部分地区绝对高程在3900m以上,北部山峰海拔大多在5400m以上,南部山峰海拔都在5100m以上,多数山岭山势陡峻、基岩裸露,局部发育残坡积物,海拔5000m以上的分水岭地带,大多常年冰雪覆盖。
在山势陡峻、常年冰雪覆盖的山路段勘测施工中,为保证勘测工作的有效性和安全性,采用无人机摄影测量技术,并基于环境情况设计对应的应用方案。
天宝dini03系列数字水准仪i角误差检校及误差分析毕业设计说明书(论文)[管理资料]
1 绪论随着科学技术特别是电子技术的迅速发展,数字水准仪在水准测量中被广泛应用。
它融电子技术、图像处理技术、计算机于一体,以条码间隔影像信息与参考信号进行图像数学处理的测量原理,自动采集测量数据、信息处理和获取自动记录每一个观测值,从而实现水准测量仪器的发展方向。
虽然数字水准仪具有将测定的i角存入机内,并对所测数据按该i角进行自动修正功能,但仪器i角受外界温度、湿度、振动的影响而瞬时变化仍然存在。
因此,研究讨论数字水准仪i角问题非常有必要。
天宝DiNi03系列数字水准仪——世界上精度最高的数字水准仪之一,其各项指标都明显优于其他数字水准仪。
其性能卓越、操作方便,使水准测量进入了数字时代,大大提高了生产效率。
已广泛应用于地震、测绘、电力、水利等系统,在各项重大工程中发挥着强大的作用。
由此天宝DiNi03系列数字水准仪i角问题研究显得尤为重要。
目前,水准仪的i角研究主要反映在三个方面,即:方法、速度和精度。
关于i角的检校方法,我们比较成熟,许多测量学类教材中,就提供了一种广泛采用的方法。
近年电子水准仪i角自动检校中,又出现了其他三种新方法。
在提高检验水准仪i角的速度上,也出现了一些研究成果,电子水准仪的自动化检校更是大大提高了检校水准仪i角的速度。
在评定水准仪i角的精度上,也出现了一些成果,既有定性的也有定量的。
国内外对水准仪的i角全部采用平行光管进行检验和校正,仪器设备价格昂贵,一般都是送专门的测绘仪器鉴定部门进行检验和校正,而仪器使用单位如果自己对水准仪的i角进行检验和校正,大都是在室外安置仪器、立尺进行检验和校正,需要人员多、误差较大、作业条件差,利用误差传播定律的定量研究不深入。
尽管这方面工作之前有人进行过研究,诸如DS3、徕卡系列、蔡司系列水准仪i角的研究,但对于天宝DiNi03系列数字水准仪i角误差检校方法与误差分析这方面,前人尚未做出过系统地分析,仍可以在这方面做一些有益的初步探究工作。
UCXP数字航摄系统DEM、DOM产品制作和精度分析
UCXP数字航摄系统DEM、DOM产品制作和精度分析陈洁;李京;杜磊【摘要】UCXP数字航空摄影测量系统集成了数字航摄仪和机载 POS系统,在获取高分辨率数码航空影像的同时,可直接得到像片中心点曝光瞬间的高精度外方位元素,再利用少量的地面控制点,即可进行大比例尺数字高程模型(DEM)和正射影像(DOM)的制作。
本文通过对UCXP航摄系统在新疆伊犁—河谷测区的生产实践,对机载POS辅助UCXP数字航空摄影测量技术在生产1∶1000比例尺成果精度进行了研究。
【期刊名称】《测绘技术装备》【年(卷),期】2014(000)004【总页数】5页(P19-23)【关键词】POS辅助;航空摄影;UCXP;精度分析【作者】陈洁;李京;杜磊【作者单位】中国国土资源航空物探遥感中心北京 100083;中国国土资源航空物探遥感中心北京 100083;中国国土资源航空物探遥感中心北京 100083【正文语种】中文随着数字技术的不断发展,航空遥感数据的获取已进入全数字时代。
数字航空摄影测量系统以其对天气标准要求低、产品多样化、地面分辨率高等优势,正逐步取代传统的胶片摄影。
机载POS技术是利用集成的全球定位系统(GPS)和惯性测量单元(IMU),同步获取高精度像片中心点6个外方位元素,改变了内业工序同时减少了外业工作量,极大地缩短了从外业获取航空资料到4D产品生成的时间,提高工作效率。
但基于POS辅助的数字航空摄影成果精度如何,能否满足生产需求?是本文研究的主要内容。
本文使用的UCXP数字航空摄影测量系统,是由美国Microsoft-Vexcel公司生产的大幅面数码航摄仪。
该产品具有超大影像幅面,达到了19600万像素(17310×11310像素),具有6μm的像素尺寸。
有效减少了航线数量、节省了时间并降低了成本,不影响其优异的辐射性能。
可更换的机载存储单元为长距离的飞行创造了条件,最小曝光间隔(1.35秒)允许使用高性能飞机并且确保重叠度。
倾斜摄影测图方法在1∶500地形图中的精度分析
倾斜摄影测图方法在1∶500地形图中的精度分析摘要:无人机挂载倾斜摄影设备进行1∶500地形图测量,和传统的人工测量相比,无人机测量灵活、迅速,作业范围广。
无人机倾斜摄影测量技术是无人机搭载多镜头相机对拍摄区域进行全方位、无死角的拍摄,经过内业差分处理制作出三维实景模型。
倾斜摄影测量具有全面直观、高效、低成本、高精度等特点。
本文运用无人机倾斜摄影测量技术进行大比例尺地形图测绘,并验证了精度满足大比例尺测量工作的要求。
关键词:倾斜摄影;高精度事后差分系统;立体采集;精度分析;1∶500地形图在摄影技术发展史上,摄影测量经历了模拟摄影测量、解析摄影测量和数字摄影测量三个阶段,目前已经全面地过渡到了全数字摄影测量时代。
当前世界范围内4D(DEM,DOM,DLG和DRG)产品的快速、经济和高精度生产为高新技术的开发奠定了重要的基础。
一般情况下,航空摄影测量区域航摄周期较长,不利于航空摄影技术的作用发挥。
所以迫切需要新的摄影测量技术来弥补这一不足,推动经济建设的迅速发展。
无人机作为空中遥感平台的技术,正好可以弥补传统航空摄影测量技术的不足。
倾斜摄影测量技术是近年来摄影测量领域中新兴的一项测量技术。
近年来,这一技术已在许多国家的许多领域得到广泛应用,并逐渐在我国的城市建设、考古研究和工程实施中得到应用。
本文使用大疆精灵 4 从多个方位对地表进行数据采集,并同时开展像控测量的准备工作。
在 Smart3D 操作平台上处理影像数据并完成空三加密以及三维建模。
通过 EPS 软件绘制 1 :500 数字地形图,并分析其精度。
结果表明。
此技术能够满足1:500 地形图测绘的精度需求,并在很大程度上能减少制作 1:500 地形图所需的时间和外业工作量。
1倾斜摄影测量技术概述在摄影技术发展史上,摄影测量经历了模拟摄影测量、解析摄影测量和数字摄影测量三个阶段,目前已经全面地过渡到了全数字摄影测量时代。
当前世界范围内4D(DEM,DOM,DLG和DRG)产品的快速、经济和高精度生产为高新技术的开发奠定了重要的基础。
11 徕卡TPS和GPS联合监测系统介绍 2
徕卡测量系统贸易(北京)有限公司
哪些需要监测
滑坡 基坑 矿山 隧道 建筑 大坝 桥梁 公路、铁路及周边区域 沉降区域 地壳变形区域
2
…
变形监测仪器 — TPS
TPS是目前国内变形监测的常用仪器之一,采用TPS进行监测有如下 优点:
远程控制系统
变形监测控制 - GPS
GMX902 Zenith25 GRX1200
目前可以连接的仪器类型 今后根据需要继续添加
13
远程控制系统
气象仪连接
目前仅可连接徕卡气象传感器; 气象仪采集的数据将直接用于测距改正; 每一个测量循环采集一次气象数据; 将来可以拓展连接其他气象传感器。
15
远程控制系统
监测循环操控 - GPS
设置开始时间和结束时间后系统自动按照设置的时间进行变形监测; 系统根据设置的处理间隔自动进行基线解算和变形分析; 监测控制均对所有的GPS同时进行。
16
远程控制系统
测点列表和数据查询
对项目中的监测点进行 查询操作。
17
远程控制系统
变形监测数据 数据查询
5
TPS和GPS联合监测的系统构成
装有机载软件
装有控制软件
6
TPS机载监测软件功能特点
按照国家相关测量规范进行多个方向,多个测回的连续测量,适合精密的控制或监 测项目中;
丰富的限差检测,保证最终的测量结果符合要求; 学习测量列表可以导入、导出,并可以添加、删除目标点,方便外业的监测测量; 监测数据可以在仪器上直接查看,亦可以通过多种数据输出,方便后处理程序进行 分析处理; 最终的测量结果自动存储在仪器内部,且可以通过端口输出到远程控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
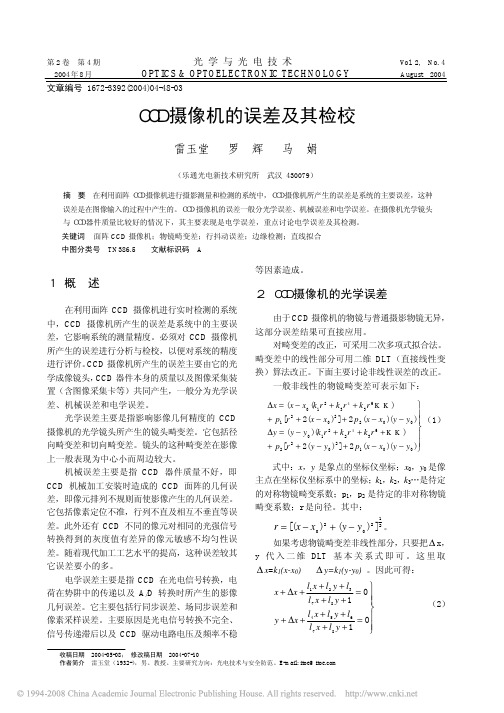
车载移动立体测量系统检校及精度分析郭波;屈孝志;黄先锋;张帆;李琴【摘要】车载移动立体测量系统可以用于快速、准确的高精度数据采集和三维建模.针对车载移动立体测量检校问题,设计了一套高精度的车载移动立体测量系统检校方法,建立了检校的数学模型,并进行了试验,分析了检校前后车载移动立体测量系统的测量精度差异.实验证明,本文研究的车载移动立体测量系统检校方法能有效地提高系统测量精度.%Vehicle-bome mobile 3D measurement system can be used for rapid and accurate data acquisition and three-dimensional modeling. In order to solve the calibration problem of vehicle-bome mobile 3D measurement,a high-precision vehicle-bome mobile 3D measurement system calibration method is designed and a mathematical model of o-verall calibration is built. Then,experiments are carried out and analysis of the measurement accuracy of the 3D measurement system before and after calibration is made. Test proves that the calibration method of vehicle-borne mobile 3D measurement system proposed in this paper can effectively improve the precision of the system.【期刊名称】《激光与红外》【年(卷),期】2011(041)011【总页数】6页(P1205-1210)【关键词】车载移动测量系统;立体测量;检校;精度分析【作者】郭波;屈孝志;黄先锋;张帆;李琴【作者单位】武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079;武汉滨湖电子有限公司,湖北武汉430079【正文语种】中文【中图分类】TH741 引言车载移动立体测量系统是一种集成多传感器用于公路测量、城市建模等应用的新型快速测量设备,近年来得到快速发展,其主要组成有:POS系统、控制计算机、距离测量仪(DMI)、测量传感器(激光扫描仪、数字相机)等。
图1为系统整体结构及组成部分坐标系统关系图。
POS系统实时对载体定位定姿;基于传感器在载体系统中的已知位置及姿态,系统实时获取传感器在地心地固坐标系或切平面坐标系中的位置及姿态;此时就可以用传感器对目标进行测量[1]。
图1 车载移动立体测量系统示意图及坐标系统Fig.1 the chart and coordinate system of vehicle-borne mobile 3D measurement system车载移动立体测量系统是一套高度集成的系统,各测量器件相对位置及姿态需要精确确定。
由于为了满足某些测量目的,车载系统中的传感器姿态及位置需要适时调整,传感器参数的偏差会严重影响系统测量精度。
本文在分析车载移动立体测量系统整体原理的基础上,建立了整体检校的数学模型,提出了一套高精度的车载移动立体测量系统相机参数、相机在载体坐标系中的位置及姿态的检校方法,其他种类的传感器的参数检校与此类似;进行了现场实验,并统计分析了检校前后车载系统测量精度差异。
试验证明,本论文提出的车载移动立体测量系统检校方法能有效提高系统的实时测量精度。
2 车载移动测量系统几何关系在车载移动测量系统中,GPS/IMU实时获取载体在WGS-84坐标系中的位置,同时获取IMU本体坐标系相对于导航坐标系的角度,即姿态角。
使用传感器对目标进行实时测量时采用的坐标系是切平面直角坐标系,必须将外方位线、角元素转换至WGS-84坐标系中。
车载移动测量系统所涉及的坐标系有:地心地固坐标系、切平面坐标系、导航坐标系、载体坐标系、传感器坐标系、像空间坐标系。
IMU与载体之间一般采用刚性连接,具有固定的相对关系。
载体坐标系定义为:坐标原点位于参考点,通常选为IMU质心,x轴指向前进方向,y轴垂直于x轴指向前进方向右侧,z轴垂直于x,y轴,指向车子下方。
传感器坐标系定义为:坐标原点位于传感器中心,z轴指向前进方向,y轴指向传感器右侧,x轴指向传感器上方[2]。
2.1 像片外方位角元素解求[2]POS系统直接获取的姿态角为IMU本体坐标系在导航坐标系中的侧滚、俯仰和偏航角;由于载体坐标系和IMU刚性相连,可以获取载体在导航坐标系中的航偏、俯仰、侧滚角(Hveh,Rveh,Pveh)。
计算像空间坐标系到切平面直角坐标系的旋转角(φ,ω,κ),需要通过一系列坐标旋转实现。
具体旋转过程为:切平面直角坐标系→地心直角坐标系→导航坐标系→载体坐标系→传感器坐标系→像空间坐标系。
此转换过程中,所有坐标系均为严格的笛卡尔直角坐标系,坐标系之间的关系均可以利用旋转矩阵严格表示。
切平面直角坐标系到地心直角坐标系的旋转矩阵为Rme,地心直角坐标系到导航坐标系旋转矩阵为Ren,导航坐标系到载体坐标系的旋转矩阵Rnb,载体坐标系到传感器坐标系的旋转矩阵为Rbc,传感器坐标系到像空间坐标系的旋转矩阵Rci,则切平面坐标系与像空间坐标系之间的旋转矩阵为:载体坐标系到传感器坐标系的旋转矩阵Rb 由c载体坐标系到传感器坐标系的旋转角(Hs,Rs,Ps)构成:其他旋转矩阵的具体形式参见相关文献[2]。
利用切平面坐标系与像空间坐标系之间的旋转矩阵,可以分离出像片在切平面坐标系中的外方位角元素[3]。
2.2 像片外方位线元素解求POS系统中直接测出的位置元素是参考点(载体坐标系的原点)在地心直角坐标系中的坐标,需要经过坐标变换计算像片在切平面直角坐标系中的外方位线元素。
设相机中心在载体坐标系中位置为(xs,ys,zs),参考点的地心直角坐标为(X0,Y0,Z0)e,则相机中心在地心直角坐标系中的坐标为[2]:把地心直角坐标系转换到切平面坐标系,可以获得像片在切平面直角坐标系中的外方位线元素:式中,(Xp,Yp,Zp)e为切平面直角坐标系原点在地心直角坐标系中的坐标[4]。
3 车载系统传感器参数检校立体相机是车载系统中常用的测量传感器,引起车载移动立体测量系统测量误差的因素有相机在载体坐标系中的位置和姿态误差,同时还有像片内方位元素不准确,相机镜头畸变等。
为了提高测量精度,需要对像片的内外方位元素、镜头畸变参数进行检校;并且用检校成果对相机在载体坐标系中的位置、姿态进行校正。
激光扫描仪等其他传感器在载体坐标系中的位置及姿态参数检校方法可以参照立体相机在载体坐标系中的位置及姿态参数检校方法。
3.1 相机内外方位元素、镜头畸变参数检校在近景大旋角摄影测量中,使用基于四元数附加参数条件的光束法平差对相机进行检校,可以取得比较稳定的计算结果。
具体来说,就是利用单位四元数(q1,q2,q3,q4)代替欧拉角列出误差方程,具体的共线方程形式与传统方式并无大差异,共线方程线性化后的误差方程形式是[5-6]:式中,x,y 是观测值;(x),(y)是近似值。
其中x0,y0,fx,fy为内方位元素;k1,k2,p1,p2 是镜头畸变参数;Xs,Ys,Zs是外方位线元素。
通过迭代平差计算,可以精确解求相机的内、外方位元素,镜头畸变参数。
3.2 相机在载体坐标系中位置、姿态校正用精确的已知点通过第3.1节中原理解求得到的像片的外方位元素可以达到很高的精度,以此为基准数据对相机在载体坐标系中的位置、姿态进行校正。
检校流程如图2所示。
图2 检校流程图Fig.2 calibration flow diagram图中(xs,ys,zs)为相机中心在载体坐标系中位置,(Ps,Rs,Hs)为相机在载体坐标系中的姿态,具体计算步骤见第3.2.1 节及第3.2.2 节。
3.2.1 相机在载体坐标系中的位置校正(1)两坐标系的转换关系确定用POS数据计算得到的像片外方位线元素在切平面坐标系下;用相机检校方式获得的像片外方位线元素在自由坐标系下;两坐标系的转换关系为:式中,(Xs,Ys,Zs)m为像片在切平面坐标系下的外方位线元素;(XF,YF,ZF)为像片在自由坐标系下的外方位线元素;(X0,Y0,Z0)为自由坐标系的原点在切平面坐标系下的坐标。
当有冗余观测时,可以列多个方程,利用平差方法解求两坐标系的转换关系,提高精度。
(2)相机中心在载体坐标系中位置的确定当已知(Xs,Ys,Zs)m,可以根据公式(3)和公式(4)推导出相机中心在载体坐标系中的位置:由于相机中心在在载体坐标系中的位置(xs,ys,zs)值有误差,用公式计算得到的像片在切平面坐标系下的外方位线元素初始值(Y0s,Y0s,Z0s)m也存在误差。
首先,用平差解求得到(Y0s,Y0s,Z0s)m与(XF,YF,ZF)的转换关系:λ',(RTF)',(X'0,Y'0,Z'0)。
接下来用精确的(XF,YF,ZF)和上面求的转换关系求得转换后的切平面坐标系下外方位元素(X's,Y's,Z's)m:此值同()m相比为较精确值。
然后,用公式(6)可以获得较精确的(x's,y's,z's),当有多张像片时,取其平均值。
再次用公式(4)计算得到像片在切平面坐标系下的外方位元素(X″s,Y″s,Z″s)m;获得较精确的值后再进行坐标转换、求得更精确的值(x″s,y″s,z″s)。
如此迭代求解,直到获得像片在切平面坐标系下精确的外方位线元素。
迭代停止的条件为前后两次求得的)与)差值在阈值范围内。
3.2.2 相机在载体坐标系中姿态校正正确校正相机在载体坐标系中的位置后,就可以精确确定切平面坐标系与自由坐标系的转换关系。
设某一时刻拍摄的影像的用相机检校方法获得的在自由坐标系下的外方位角元素为φF,ωF,κF,由此可以确定旋转矩阵RF:把此旋转矩阵转换到切平面坐标系下:得到像片在切平面坐标系下精确的旋转矩阵RT后,现在要对传感器坐标系在载体坐标系中的旋转角度进行修正。