时延网络控制系统的研究综述
网络化运动控制系统中调度与控制协同设计的研究

2 网络化运动控制 系统 的典型结构
传统 的多轴运 动控 制 系统主 要采 用分层 结构 实 现 ,即各 轴 具 有独 立 的控 制 器和 传 感器 及 触 发器 , 再 由主控 制 器对 各轴 进行 协调 控制 ,分 层结构 具 有
明 显 的缺点 :不 便 于节 点 的加入 和功 能 的扩充 ;在
特 殊 的网络 控制 系统 。网络 化 运动 控制 的性 能不 仅
性提 了更高的要求;这类设备 中很大一部分是运 动控 制 系统 ( 即对机 械运 动 部件 的位 置 、速 度 等进 行实时的控制管理 , 使其按照预期的运动轨迹和规 定 的运 动 参数 进行 运动 ) 而 运动控 制 系统 是一种 典 。 型 的控制 循环 周期 短且 具 有高 精度 、高 动态 响应 要 求 的控制 系统 ,除 了要求 高性 能 的传 输之 外 ,它要 求 系统能 在极 短 的时 间 内做 出响应 。过 去 的单机 系 统和 点对 点 的连接 方 式 ,不 能满 足 各节 点对 实 时性
和快 速 性 的要 求 和需 要 交换 的信 息 量 的迅 速 增长 。
取 决于 控制 算法 设计 ,而且 与网络 和计 算资 源 的调
度 密切 相关 。所 以 ,有必要 专 门针对 运 动控 制 系统
在 网络化 环境 下 的资源 调度 和性 能优化 进行 深入 研 究 ,这对 促进 我 国高性 能装 备制 造 业 的发展 有较 强
1 研 究 意义
装备 制造 业 的快 速发 展 ,对 设 备 的性能 和可 靠
中的很 多假 设条件 ( 等时 间采 样 、同步控 制 、无 延 迟 的传感器 和执行 器信号 ) 不再 成立 , 系统 的分析 使 和设 计增加 了很大 的难度 :网络 时延 、数 据丢 包等 。 网络化 运 动控 制 系统 ( NMCS 就 是构 建在 控 制 ) 器 与 多轴 电机驱 动器 之 间 ,能够 实时 、同步地 传 送 运 动控 制指 令和 接 收运动 状 态 的控制 系统 ,是 一类
具有未知时延的网络化控制系统故障检测
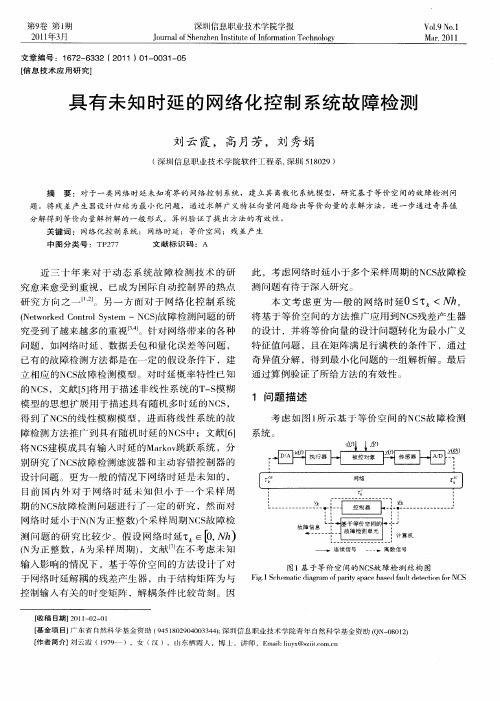
图 1 于等 价 空 间 6NC g 障 检 测 结 构 图 基 h S
F g1S h ma i d a r m o a i p c a e u ee t n fr S i . c e t ig a f r ys a e s df hd tci c p t b a o o NC
障检测 方 法 推广 到 具 有 随机 时 延 的NC 中 ;文 献 [] 系统 。 S 6 别 研 究 了N S 障检 测 滤波 器 和 主 动容 错 控 制 器 的 C故
设 计 问题 。更 为一 般 的情况 下 网络时 延 是 未知 的 , 目前 国 内外 对 于 网 络 时 延 未 知 但 小 于一 个 采 样 周 期 的N S 障检 测 问题进 行 了一 定 的研 究 ,然 而对 C故 网络 时延 小 于N N ( 为正 整 数 ) 采 样 周期 NC 故 障检 个 S
(ew re o t l yt —N S故 障检 测 问题 的研 将 基 于 等 价 空 间 的方 法推 广 应用  ̄ N S 差 S e C) J IC 残
已有 的故 障检测 方 法都 是 在一 定 的假 设 条 件下 ,建 奇异 值分 解 ,得 到 最小 化 问题 的一组 解 析解 。最 后 立 相 应 的 N S 障检 测 模 型 。对 时 延概 率 特 性 已知 通 过算 例 验 证 了所 给方法 的有效 性 。 C故 的NC ,文 献 将 用 于描 述 非 线 性 系 统 的T s 糊 S —模
模 型 的思 想 扩 展用 于描 述 具有 随机 多 时延 的N S C ,
1 问题 描 述
考虑如 图1 所示 基 于 等 价 空 间 的 N S 障 检 测 C故
) } ) l 癣
得 到 了NC 的线 性 模 糊模 型 ,进 而将 线 性 系统 的故 S 将 N S 模 成具 有 输 入 时延 的Mak v C建 ro l 系 统 ,分  ̄跃
基于TrueTime工具箱的网络控制系统仿真研究

基于TrueTime工具箱的网络控制系统仿真研究
何坚强; 张焕春
【期刊名称】《《微计算机信息》》
【年(卷),期】2004(000)001
【摘要】网络控制系统是基于网络技术的分布式控制系统,是融合了计算机技术、通信技术与控制技术的复杂系统。
结合应用实例,本文介绍了具有网络控制系统仿真功能的基于Matlab的TrueTime工具箱,给出了具有时延特征的网络控制系统的控制与调度仿真结果。
【总页数】3页(P33-34,98)
【作者】何坚强; 张焕春
【作者单位】210016 南京航空航天大学自动化学院
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于TrueTime工具箱的网络控制系统及其在电机控制上的应用 [J], 程启明;郭瑞青;杜许峰;夏征
2.基于Truetime的热工过程网络控制系统仿真研究 [J], 龙剑桥;刘爱君
3.基于Truetime工具箱的网络控制系统的仿真研究 [J], 崔庆权;陈家文
4.基于TrueTime工具箱的网络控制系统时延分析 [J], 邓睿;汤贤铭;俞金寿
5.基于TrueTime的网络控制系统仿真平台的构建及其仿真分析 [J], 周艳;陈永建
因版权原因,仅展示原文概要,查看原文内容请购买。
遥操作机器人系统的变时延控制

在已有的解决时延问题的众多方案中 , Smith 预估器由于其设计简单 , 调试方便 , 成为近年来解 决遥操作机器人时延问题的热门方法之一 。比较典 型的方法有以下两种 :
4 改进型 Smith 预估器原理
图 1 预测误差图
三条曲线从上到下依次是 RBF 网络 , 自适应 网络 , 某线性预测模型 。由图可见 , RBF NN 的预 测精度最高 , 其预测误差均方根为 01177 1 。在初 始阶段 , 各神经网络的预测输出与实际值大相径 庭 , 以 RBF 为例 , 预测误差甚至可以达到 100 % 。 所以在实际应用中必须考虑系统的鲁棒性问题 。
Teleoperation Control of an Internet2based Robot with Varying Time Delay
LIU Shu2guang , ZHOU Zong2xi , YANG Feng
(School of Electronics and Information , Northwest Polytechnical University , Xiπan 710072 , China)
1) 改进型单 Smith 预估器原理 对于中低精度 遥操 作 机 器 人 , 通 常 对 输 出 信 号 C ( s ) 的 时 延 exp [ - (β+γ) s ]做出预估即可 。即由 RBF NN 预估 出系统的输出信号 C ( s) 的时延值 exp ( - τs) (其真 值 exp [ - (β+ γ) s ]) ,提供给改进型单 Smith 预估 器 ,再由该 Smith 预估器对 C ( s) 的时延进行补偿 。
基于调度与控制协同设计的网络控制系统研究

自 动 化 及 仪 表
第3 4卷
统 的各个组成部分通常被实现为一个实时 内核或实 时操作系统 中的一个或多个任务 。在现代多任务操
无法保证信息传 输周期 的确定性 , 但通 常可 以保证 信息的传输不超 出时限( ieD al e 。也就是说 Tm edi ) n 通过设置 高的优 先级或采用 有效 的调 度方法 , 以 可
维普资讯
综 述 与 评 论
化 动 及 表,0 ,46:~ 工自 化 仪 2 7 3() 6 0 1
Co to n n tu n s i e c lI d ty n r la d I sr me t n Ch mia n usr
基 于调 度 与 控 制 协 同设 计 的 网络 控 制 系统 研 究
N S结构如图 1 C 所示 。
2 网 络 控 制 系统 中调 度 与 控 制 的 关 系
目前 大多数计算机控制系统都 由嵌入式 系统组
成, 计算机成 为 了系统 中 的重要 组成部分 。控 制系
网络控 制系统 中控制 与调度是 相互影 响 的 , 从
控制角度来说 , 样 系统 的采样 周期选取 规则一 般 采
控制系统经过集 中控制 、 集散控制的发展 , 现在 已经进人网络化的发展 阶段 。传 统的集 中式控 制系
统和集散式控制系统经 过多 年的应用 , 实践证 明都 存在一些共同 的缺 点 , 随着 现场设备 的增 加 , 即, 系 统布线趋于复杂 , 成本 显著提 高 , 抗干扰性 变差 , 灵 活性降低 , 可扩展性 变差等 。能够根 本解决 这些 问
能 , 同时也会增加大量 周期性 的任务 , 但 进而会加重 任务调度 的负担 ; 而调度对 控制任 务的影响 主要体 现在采样 抖动 ( a pig ie) 输人 输 出时延 (n Sm l t r 、 n Jt I. p t up t a ny 和时延 的抖动 ( a nyJt ) u. tu Lt c ) O e L t c ie 方 e tr 面 。所 以 , 控制和调度 在 网络 控制 系统 中是 一对 矛盾 , 解决这一矛盾 的方法 是在一定 约束条件 下取 得总体性能 的折衷。
网络化系统的稳定性分析、控制及滤波的开题报告

网络化系统的稳定性分析、控制及滤波的开题报告一、选题背景网络化系统是一种集成了物理、计算和通信的系统,其应用范围广泛,涉及工业控制、交通运输、能源与环境等众多领域。
随着网络化系统规模的不断扩大,稳定性问题愈加突出,因此对网络化系统的稳定性分析、控制及滤波具有重要意义。
二、研究现状网络化系统的稳定性分析、控制及滤波已经成为研究的热点。
现有的研究成果主要分为下列几方面:1.稳定性分析稳定性分析是研究网络化系统稳定性的基础。
现有的方法主要包括Lyapunov稳定性分析法、Passivity分析法等。
这些方法主要是通过分析系统行为,找到系统的稳定性条件。
2.控制控制是维持网络化系统稳定运行的关键。
目前,研究网络化系统控制的主要方法包括传统PID控制、模糊控制、神经网络控制等。
这些方法主要通过对系统动态行为进行控制,实现系统的稳定、可控和可观。
3.滤波滤波是网络化系统中信号处理的必要环节。
常用的滤波方法主要包括FIR滤波、IIR滤波、小波变换等。
这些方法可以实现对系统输入信号的预处理,有效提高系统精度和鲁棒性。
三、研究内容1.网络化系统稳定性分析通过分析网络化系统中的数据流、时延、拓扑结构等特性,建立系统数学模型,基于Lyapunov稳定性分析法、Passivity分析法等方法,分析系统的稳定性,并寻找优化稳定性的控制策略。
2.网络化系统控制针对网络化系统中存在的时延、通信不可靠等问题,提出一种基于模糊PID控制的控制策略。
控制器采用模糊方法,将PID控制器所需的参数设置为模糊变量,通过模糊推理实现控制器参数的在线优化。
3.网络化系统滤波结合网络化系统中信号处理中的实际需求,通过小波变换等方法,对数据信号进行处理优化,提高网络化系统的精度和鲁棒性。
四、研究意义本研究的意义在于:1.研究网络化系统稳定性问题,提出符合实际应用场景的控制策略,保证系统的可靠稳定运行。
2.研究网络化系统的滤波方法,实现对数据的处理和优化,提高网络化系统的精度和鲁棒性。
船舶可调桨网络控制系统研究
Z e a g2 2 0 , hn ) h ̄i 10 3 C ia n Abta t C nrl be pt rp l r f h r: P cnrlss m i te sb yt fsi src : o t l l i h poel (o sot C P) ot yt s h u ss m o hp oa c e r o e e
Re e r h o hi s a c n s p CPP e w o k d c nt o y t m n t r e o r ls se
Z U N i —o Q i g H A G Xa b , I a o L n
( c o lo lcrnc n no main Ja gu Unv ri fS in ea d T c n lg , S h o fE e t isa dI fr t ,in s iest o ce c n e h oo y o o y
0 引 言
可调螺距螺旋 桨 ( 简称为 C P 是船舶推进 系统 的 P) 关键设 备 , 提 高船 舶 机 动性 的主要 手段 之 一 。C P 是 P
摘 要 : 可调螺距螺旋桨( 简称可调桨 C P 控制系统是船舶推进系统的重要子系统。随着船舶推进系统在 P)
响应 速度 和操 纵 性 能等 方 面提 出 的更 高要 求 , P C P控 制 系 统 已从 传 统 的 控 制 系 统 发 展 到 分 布 式 的 网络 控 制 系 统 , 网 而 络控 制 的 引入 必然 产生 不确 定 的 网络 时延 。 因此 , 文 采 用 支 持 向 量 机 +广 义 预 测 控 制 +队 列 机 制 的 混 合 控 制 方 法 本
p o u so y t m . Al n t h hp p o u so y tm et rr q sso h e p n e s e n n ln r p lin s se o gwi t e s i r p lin s se b te e ue t ft er s o s pe d a d ha d i g h q aiy,th sb e e e o e r m h r d t n lc nr ls se t h iti u e ewok d c nr ls se , u lt i a e n d v lp d fo t e ta ii a o to y tm o t e d srb td n t r e o to y tm o wh l h ewo k c n r lh s ie i by c u e h n fn t ewo k dea . Th st ewo k d c n r le ie t e n t r o to a n vt l a s d t e idei ie n t r l y a u he n t r e o to lr h s b e e in d b s d o h o bnain o u p r e t r ma h n g n r lz d p e itv c n rl a d a e n d sg e a e n t e c m i to f s p o v co c i e, e e aie r d ci e o to n t q e ng sr t g . S mu a in r s ls s o t tt e lo ih c u d fe tv l o e s t h n u nc f u ui tae y i l t e u t h w ha h ag rt m o l ef ciey c mp n ae t e i f e e o o l n t r e a wh c o l k tpo s so e trp ro ma c fsa lt n o sne s ewo k d ly, ih c u d ma e i s e fb te e f r n e o tbi y a d r bu t s . i
基于网络的广义预测控制系统的研究
性 、 韧 性 和 可靠 性 等 诸 多 优 点 。 柔 闭环 网络 控 制 系 统 的 结 构 如 图 1 示 。 示 传 感 器 到 控 制 器 的传 输 延 时 ; 所 T表
控 l 被艨 l
圆● 圆干
舄瘸 ; 络户
通 嘲 讯络 t
士
表 示 控制 器 对 从 传 感 器 接 收 到 的数 据 包 进 行 解 包 、 码 , 解 实施 控 制 算 法 并 将结 果 编 码 、打 包 所 需 要 的 时 间 ,称 为 控 制 器 计 算 延 时 ; 示 控 制 器 到 执 行 器 的传 输 延 T表 时; 因此 , 网络 总 延 时 可 以 表 示 为 T T + T 。其 中 ,C 节点 的负 载 影 响 很 大 。主 = T + T受
ZH O N G Zhi a —y n
(lc o n fr t nDea met f h n agC Hg, h n ag2 20 , hn) Eet na dI oma o p ̄ n o ej n o ee Z ej n 10 3 C ia r m i Z i i
A bsr c :The pa r e in he ta t pe d sg s t new o k ea P e ci Con r 1 . sn u or co a hne t n t or d ly he fe t t r d ly r dit ve to U i g s pp tve t r m c i son he ew k ea t e c ve i
l SN 1 0 - 0 4 S 9 3 4 0
基于时滞系统模型的网络控制系统稳定条件
s s e r u h c n e v tv y s l i g t e l e r ma rx i e u l y r h i e r y t ms a e m c o s r a i e b o v n h i a t i n q a i o t e l a n t n
Xia 7 0 7 。Ch n ) n 10 1 i a Ab t a t sr c : Th a y e s mp o i t b l y i e d l y rt ra o t e e wo k d o t o t t s a i t t — e a c i i f r h n t r e c n r l c i m e
S a iiy c ie i n f r ne wo ke o r ls s e s t b lt r t r o o t r d c nt o y t m b s d o he mo e f t i e d l y s s e a e n t d lo he tm - e a y t m
ZHA NG iri , ZH OU Li u , CH E i n — u n X n a — a。 h X a gqa 。 ( . M i sr fEd . Ke a . o o 1 n ty o u yL b fC mp t ra d I f r a in S c r y,Xiin Unv , u e n n o m t e u i o t da i. Xia 7 0 7 ,Chn ; 2 Re e rh I s. o u i da Te h oo y,Xiin Unv , n 10 1 ia . s a c n t fM h me i c n l g d a i .
张 喜 民h , 周 利 华 车 向 泉。 ,
具有时变采样周期的网络化控制系统故障检测
关健词:网络化控制系统;时变采样周期;时廷;凸多面体不确定系统;鲁棒故障检测滤波器 ; 线性矩阵不等式
Fa u l t De t e c t i o n f 0 r Ne t wo r k e d Co n t r o l S y s t e m wi t h
Ti l ' i me q - v a r y i n g g ̄ S a mp l i n g Pe e r i o d
第3 算
机
工
程
2 0 1 3年 3月
Ma r c h 201 3
N o. 3
Compu t e r Eng i n e e r i n g
开发研究与设计技术 ・
文 章 编 号 j 1 0 o 0 - 3 4 2 8 ( 2 0 1 3 ) 0 3 — - o 2 8 9 _ _ 0 6 文 献 标 识 码: A
p o l y t y p i c ra f me wo r k i s p r o p o s e d . T h e r e s i d u a l g e n e r a t o r i s c o n s t r u c t e d a n d t h e p r o b l e m o f f a u l t d e t e c t i o n c a n b e c o n v e te r d i n t o t h e
F AN J i n - r o n g . F AN G Hu a - j i n g
( 1 . C o l l e g e o f C o mp u t e r S c i e n c e , S o u t h — c e n t r a l Un i v e r s i t y f o r Na t i o n a l i t i e s , Wu h a n 4 3 0 0 7 4 , C h i n a ; 2 . De p a r t me n t o f C o n t r o l S c i e n c e a n d E n g i n e e r i n g , H u a z h o n g Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Wu h a n 4 3 0 0 7 4 , C h i n a )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
改进了自适应 Smith
预测控制方法, 用模糊神经网络控制器代替 了惯常使用的 PID 控制器。 但该 Smith 预报 器却使用了一个未经证明的标识算法来确 定时变参数。 Oguchi 设计了一个用于解决时变延迟、 数据包丢失和数据包传输无序的补偿器。 该 补偿器包括一个基于模型的状态预报器, 一 个输入缓冲,并采用了带有时间戳的数据。 通过这种方法将非线性系统转化为了一个 带有固定时延的线性系统。 2.2.2 时延预测算法
第1卷 第1期 VOL.1 No.1
控 制 与 决 策 Control and Decision
2015 年 6 月 2015.06
时延网络控制系统的研究综述
朱凯歌 1
(1.西北工业大学 自动化学院,西安 2014261623)
摘
要: 本文对网络控制系统中的时延分析进行了研究,从时延的产生机理,时延的种类以及解决措施等
2
时延的解决措施
当前理论界主要从两个方面着手来解
口得出控制环中各个节点的起始传输时刻, 最终确定了系统静态调度表的结构。 2.2 控制角度 从控制角度进行时延补偿, 通常有两种 方法: 确定性控制设计方法和随机控制设计 方法。采用确定性控制设计方法时,往往都 是将随机时延转化为固定时延, 这样虽然能 很好的解决时延的不确定性问题, 但同时也 人为增大了时延, 降低了系统应有的控制性 能。 随机控制设计方法的关键地方在于能够 合理地对时延进行建模和预测, 将时延作为 系统中的随机变量,设计随机最优控制律。 根据不同的时延状况,随机或时变的延迟, 要建立合理的模型和比较准确地预测时延 的变化,具有非常大的难度。 2.2.1 随机控制设计方法 早期研究中.Asok Ray
c sc ca
适当的软硬件设计来减小, 因此在大多数分 析中 k 可以忽略不计。
c
1)传感器到控制器的时延
ksc : 当一
个传感器给控制器发送测量值时, 就产生该 延时。在 k 时刻可以表示为:
ksc kcs kss
sc k ss k
(2)
1)其中 和 分别是传感器开始采 样的时刻和控制器开始运算的时刻。 2)控制器到执行器的时延 k : 该延时
4
决时延问题:一是从网络的角度出发,设计 一种通信协议或调度算法, 以减小网络时延 对控制系统的影响; 另一个是从控制的角度 出发,在现有的网络结构和协议的基础上, 设计控制系统的结构、控制算法等,来补偿 或减少网络时延对控制系统的不良影响。 当 然, 有时候仅仅从网络的角度或者仅仅从控 制的角度出发可能还不能很好地解决时延 问题, 而是需要将两者结合起来考虑以取得 更好的效果。 2.1 网络角度 由于时延的产生与网络资源直接相关, 因此对 NCS 进行实时调度就显得非常重要, 采用合适的调度算法来减少时延也就成为 顺理成章的方法, 不少文献中已经出现了各 种调度算法。 当网络通讯遇到的流量超过其所能处 理的限度时, 文献提出在通讯协议中利用拥 塞控制和回避算法等方法来获得系统更好
2
ca k
控制器
Cagri Imer
sc k
等提出了一种新颖的 ABR 拥塞
控制算法, 该算法能够自动适应网络状况的 变化,并且对于网络时延具有鲁棒性。 万仁君
3
设计了一种基于时间窗口的
NCS 调度算法。该调度算法从控制系统稳定
图 1 时延网络控制系统
性能角度出发, 利用控制环的最大允许环延 时确定控制环的采样周期, 同时基于时间窗
k ksc kc kca
(1)
式中,k 表示第 k 个采样周期,τk 是传感器发出测量信号到执行器接收到控 制信号之间的总时延, k 为传感器到控制
sc
器的时延, k 为控制器的计算时延, k 为
c ca
控制器到执行器的时延。 k 是随机的, 但实
c
际上 k 比 k 、 k 小很多,而且可以通过
2
控
制
与
决
策
第1期
定的。时延会降低系统的性能,使系统 的稳定范围变窄,甚至使系统不稳定。时延 对控制系统的性能有重大影响,在 NCS 的分 析和设计中是不可忽略的重要因素。
度网络中, 当节点在等待令牌或时间槽时也 会产生网络诱导时延, 其会降低系统的性能 甚至引起系统不稳定。 1.2 网络时延的组成 NCS 研究的核心问题是如何有效处理 网络引起的时延。从时延产生的过程来看, 系统中的总时延 τk 可以分为三个部分:
1
网络控制系统的时延分析
在网络控制系统中, 时延是普遍存在的
1.1 网络时延产生的原因
现象。它来源于控制对象本身的时滞,控制 算法的复杂程度, 数据转换和传输以及外界 干扰等。在实时网络控制系统中,时延可以 分为控制算法时延和网络诱导时延两大类, 由于控制算法时延是如传感器、 控制器和执 行器完成自身功能所用的时间, 在实际情况 中相对采样周期较小并可以忽略, 所以在网 络控制系统中主要存在的是网络诱导时延。 产生网络诱导时延主要可能由以下三 点因素构成: 1)数据包排队等待时延。 当网络忙或发 生数据包碰撞时, 等待网络空闲所用的等待 时间。 2)信息产生时延。 发送端待发送信息封 装成数据包并进入排队队列所需时间。 3)传输时延。 数据包在实际传输媒体上 传输所需时间,其大小取决于数据包的大 小、网络带宽和传输距离。 以上三种时延构成了网络诱导时延的 主要部分。在网络环境下,多用户共享通讯 线路且流量变化不规则,所以,当 NCS 的 传感器、 控制器和执行器之间通过网络传递 信息、 网络交换数据时必然会导致网络诱导 时延,在经过路由器时还有排队等待时延, 以及不同网段间传输时延等。另外,有些网 络协议在发生数据包丢失或出错时允许重 发数据包,这又扩大了数据传输时延,在调
kc kcf kcs
cf cs
(4)
其中 k 和 k 分别是指控制器开始计
3
控
பைடு நூலகம்
制
与
决
策
第1期
算的时刻和计算完成得到控制信号的时刻。 一般的 NCS 系统结构如图 1 所示。
的控制性能。 Walsh
1
提 出 了 TOD (Try -Once
-Discard)控制网络协议。该协议使周期性 执行器 被控对象 传感器 数据在传输过程中仅发送一次, 如果传输失 败则丢弃当前数据, 从而降低了网络拥塞发 生的可能,减少了平均传输时延。Orhan
sc
的 NCS 结构, 该结构考虑了时延可能会超过 一个采样周期的情况, 在发送的传感器信息 后面附加了发送队列的长度信息, 使控制器 可对接收信息的产生时刻做出较为准确地 判定, 从而可以估计当前时刻的被控对象的 状态。 Nilsson 根据传感器采用时钟驱动,控 制器和执行器采用事件驱动的网络控制系 统模型,假设时延的械率分布已知,且不超 过一个采样周期, 并利用马尔可夫模型对时 延的概率分布进行了建模,给出了 NCS 的 LQG 随机最优控制律,该控制律满足确定性 等价原理。 魏震针对网络时延分布未知的情况, 改 进了 Nilsson 的 LQG 控制律, 提出了平均时 延窗口的在线估计方法, 该方法不需要网络 时钟同步和时延补偿。在此基础上,运用最 优控制设计了网络控制器。 Feng Dong-Mei
0
引 言
近年来随着现场总线控制技术、 工业以 控制、无延时传感和调节等,已经不再适用 于网络控制系统。在网络控制系统中,控制 器和远地控制对象的传感器和执行器等设 备间通过网络进行信息交换时, 由于源自多 个设备的信息流量变化不规则, 信息多包传 输、多路径传输、数据包碰撞、网络拥塞、 包时序错乱、包丢失、包重传、连接中断等 原因,信息传输时间延迟(时延)不可避免, 这种由网络引起的时延根据控制网络的不 同,可能是恒定的,时变的,甚至是随机不确
ca
在控制器发送控制信号给执行器的过程中 产生。可以定义为:
kca kas kcf
其中
as k
(3) 分别是执行器收到控制
和
cf k
信号并且开始执行的时刻和控制器运算完 成得到控制信号的时刻。 3) 控制器执行运算产生的时延 k : 该
c
时延指的是控制器开始计算到计算完成得 到控制信号这段时间,可以由下式定义:
Kaige Zhu1
(1.Shcool of Northwestern Polytechnical University ,xi’an , 2014261623,China) Abstract: In this paper,time-delay analysis of NCS is studied.It introduces the current situation of time-delay analysis from the perspective of the mechanism resulting in time-delay,solving method and the kinds.Then,starting from the two aspects of control and communication network , the result of the current research of time delay problem are discussed and summarized;Through systematic analysis and comparison , points out the problems existing in the existing theoretical results and shortcomings;Finally, it is pointed out that the main task of the future in this field and developing direction. Key words: Networked control systems; time-delay; Communication network; Collaborative design