磁导航智能车中的水平检测线圈特性分析
磁导航式差速AGV的结构及控制设计

2、使用伺服电机驱动器作为执行机构,接受主控制器的指令,控制伺服电 机的运动,从而实现AGV的精确控制;
3、配备多种传感器,如红外线传感器、超声波传感器等,以实时监测AGV的 运行状态和周围环境;
五、磁导航式差速AGV的优缺点
磁导航式差速AGV的优点主要表现在以下几个方面: 1、高精度:由于采用了磁导航系统,可以确保AGV的行驶轨迹高精度;
2、高灵活性:磁导航式差速AGV可以轻松应对各种复杂环境,具有较高的适 应性;
3、高效率:磁导航式差速AGV可以实现货物的快速、精准配送,提高物流效 率;
在磁导式AGV控制系统设计与研究方面,首先需要了解磁导式AGV的基本工作 原理。磁导式AGV主要利用磁导航传感器检测地面磁信号,通过控制算法进行导 航。因此,磁导式AGV控制系统设计主要包括磁场设计、控制算法设计和机械结 构设计。
磁场设计是磁导式AGV控制系统设计的关键环节,直接影响着AGV的导航精度 和稳定性。磁场设计需要综合考虑磁信号的强度、分布、稳定性等因素,以实现 AGV的准确导航。此外,磁场设计还需要考虑地面的平整度、硬度、磁信号的穿 透能力等因素,以确保AGV在不同环境下都能够稳定运行。
在磁导式AGV控制系统研究方面,需要对该系统的稳定性、路径规划算法、 鲁棒性等方面进行深入研究。稳定性分析是研究磁导式AGV控制系统的重要内容 之一,直接关系到系统的可靠性和安全性。通过对系统的稳定性进行分析,可以 有效地避免系统失稳或出现其他不良状态,从而提高系统的运行效率和安全性。
路径规划算法研究是磁导式AGV控制系统的另一个重要研究方向。在实际应 用中,AGV需要能够在复杂环境中快速、准确地规划出最优路径,以实现高效运 输。通过对路径规划算法进行研究,可以提高AGV的路径规划效率和精度,从而 缩短运输时间,提高整体运行效率。
电磁导航式智能车控制系统研究
a n d s t u d y o b j e c t .Th e i n d u c t a n c e c o i l a n d o p e r a —
t i o na l a mpl i f i e r c o mp on e n t s s e l e c t i on a n d c i r c u i t de s i gn i s d i s c us s e d i n d e t a i l ;t h e s e ns o r l a y ou t me t ho ds o n t he i nf l ue n c e t o t he pr e c i s i o n of de t e c — t i o n i s e s s e n t i a l a na l y z e d, a k i nd of“p i e c e wi s e i n— t e r po l a t i on l a be l ”d i r e c t i on c o nt r o l s c h e me i s pu t
度 和可靠 性 高的特 点 。传感 器输 出信号 为连续 的模
拟 信号 , 易 于实现 智能 车巡线 的精 确控 制 , 更 有 益于
增 进高 校学 生对智 能 车 的研 究 与探索 。
关键 词 : 智 能车 ; 传感 器 ; 电磁导航 ; 分 段插值
中图分 类 号 : TP 2 4 2 . 6
Co nt r o l Sy s t e m
H OU Da i—po , KO NG Li n —l i n , W ANG Sh uo YANG Che n g 1, HAN Zh i—x i n
磁场的特性与磁感应定律:磁场的特性和磁感应定律的应用

磁场的特性与磁感应定律:磁场的特性和磁感应定律的应用磁场是围绕磁体或电流而存在的一种物理现象。
磁场具有一些独特的特性,并且可以通过磁感应定律来描述和应用。
首先,磁场具有方向性。
磁场总是自北极流向南极,这是由于磁力线的性质所决定的。
磁力线是用来表示磁场的一种图示方式,它们从磁体的北极出发,穿过空间,在磁体的南极结束。
磁力线的密度表示磁场的强度,而磁力线的方向表示磁场的方向。
通过观察磁力线的分布,可以得知磁场的性质和强弱。
其次,磁场具有不可见性。
和电场不同,磁场不能直接观察到,它是一种纯粹的物理现象。
我们只能通过磁力线和其他物理实验来间接研究和了解磁场的特性。
这种不可见性使得磁场的研究更加困难和复杂。
另外,磁场具有不受物体形状和大小限制的特性。
无论是杆状磁体、环状磁体还是针状磁体,它们都可以产生磁场,并且磁场的性质不会受到磁体自身形状和大小的影响。
这是因为磁场是由磁体中的微观电流和磁性原子的相互作用形成的,与磁体的宏观特征无关。
根据磁场的特性,研究者发现了磁感应定律,它是描述磁场与运动载流子之间相互作用的定律。
磁感应定律表明,在磁场中,载流子会受到一个称为洛伦兹力的作用力。
洛伦兹力的方向垂直于载流子的运动方向和磁场的方向,其大小与载流子的速度、电量和磁场的强度有关。
磁感应定律的应用非常广泛。
首先,它被用于磁场测量。
通过测量洛伦兹力,可以确定磁场的强度和方向。
这在地球磁场和人工磁场的研究中有着重要的应用。
其次,磁感应定律可以解释电动机和发电机的工作原理。
电动机是通过在磁场中施加洛伦兹力使得导体旋转来实现机械能转换,而发电机则是通过导体在磁场中运动产生电流来实现能量转换。
另外,磁感应定律还被应用于磁力计和磁传感器等设备的设计和制造。
磁力计是一种用来测量磁场强度的仪器,它通常使用洛伦兹力或霍尔效应进行测量。
磁传感器是一种能够检测磁场变化并转化为电信号的装置,它在自动控制、导航和医疗设备等领域有着广泛的应用。
第二章 汽车电子控制系统的核心—ECU

〔 2 〕 霍 尔 式 传 感 器
霍尔效应: 半导体或金属薄片置于磁场中,当有电流〔与磁场
垂直的薄片平面方向〕流过时,在垂直于磁场和电流 的方向上发生电动势,这种现象称为霍尔效应。 霍尔元件:
目前常用的霍尔资料锗〔Ge〕、硅〔Si〕、锑化铟 〔InSb〕、砷化铟〔InAs〕等 。N型锗容易加工制 造,霍尔系数、温度功用、线。
3〕测量电路的作用是将转换元件输入的电参量经过处置
2 常用传感器的任务原理
〔1〕磁电式传感器 磁电效应 依据法拉第电磁感应定律,线圈在磁场中运动〔或线圈
所在磁场的磁通变化〕 ,切割磁力线时,线圈中发生感应 电动势。
直线移动式磁电传感器 转动式磁电传感器
磁电式转度传感器
一款高档发起机的ECU
ECU在发动机电控系统中的应用方框图
2.3 ECU的开展趋向
➢ 集中综合控制、总线技术、汽车智能控制是未来汽车电子控制 技术重点开展方向。
➢ 集中综合控制:单片机的类型将会启用更高位数的,各系统 ECU向综合一体开展,互联网技术将能够切入,车载PC融 入……
• 总线技术:各个ECU 经过局域网技术完成 车内互联,各ECU间 信息共享。
压电式传感器是物性型的、发电式传感 器。常用的压电资料有石英晶体〔SiO2〕 压电和式人传感工器分运解用实的列压:爆电震传陶感瓷器、。平压安气电囊陶碰瓷撞传的感压器 压电减速度传感器 电常数是石英晶体的几倍,灵敏度较高。
压电爆震传感器的压电共振点制造在爆震振动频率上,爆震传感器装置在
发起机气缸外壁,发作爆震时,压电共振片发作共震,会发生较大的电压信 号输入给ECU.
➢ 汽车上的大局部电子控制系统中的ECU电路结构迥 然不同,其控制功用的变化主要依赖于软件及输入、 输入模块的功用变化,随控制系统所要完成的义务 不同而不同。
磁导航原理的应用

磁导航原理的应用1. 磁导航原理概述•磁导航是一种基于磁场感应原理的导航方式。
•磁导航利用地球磁场或自身产生的磁场来确定方向和位置。
2. 磁导航的原理•磁导航依赖于磁场感应原理,根据磁场的方向和强度来确定方位。
•在磁导航系统中,通常需要使用磁传感器来测量磁场的参数。
•磁导航系统还需要使用算法来计算方向和位置。
3. 磁导航的应用领域•航空航天:磁导航可用于飞行器的导航和定位,在航空航天领域有广泛的应用。
•智能车辆:磁导航可以被用于自动驾驶系统中,帮助车辆确定行驶方向。
•手持设备:磁导航可以被用于手机和平板电脑等手持设备中的导航功能。
•潜艇和水下机器人:磁导航可以帮助潜艇和水下机器人在水下环境中定位和导航。
4. 磁导航的优点•磁导航系统不依赖于卫星信号,因此在室内和遮蔽环境下仍然可用。
•磁导航系统的成本相对较低,相比于全球定位系统(GPS)更为经济实惠。
•磁导航系统的精度较高,可以满足许多应用场景的定位和导航需求。
5. 磁导航的局限性•磁导航受到地球磁场的影响,地理位置不同导致磁场参数的变化,可能影响导航的精确性。
•磁导航对于金属和电磁干扰比较敏感,可能会受到外部干扰而导致导航误差。
•磁导航无法提供高精度的定位和导航,对于一些特定应用场景可能不够准确。
6. 磁导航的未来发展趋势•磁导航技术在不断发展中,磁传感器的精度和稳定性不断提高。
•磁导航系统与其他导航技术(如GPS、惯性导航等)的整合将会成为未来的发展趋势。
•磁导航系统的应用领域将会进一步扩展,涉及到更多的行业和领域。
以上是关于磁导航原理的应用的一些基本内容和概述,磁导航作为一种基于磁场感应原理的导航方式,在航空航天、智能车辆、手持设备和水下机器人等领域有广泛的应用。
磁导航系统的优点是不受卫星信号的限制,成本相对较低,精度较高;但也存在一些局限性,如受地球磁场和外部干扰的影响。
未来,磁导航技术将会进一步发展和应用,并与其他导航技术进行整合。
电磁导航式智能车传感器模块的设计与实现

2系统 描 述 .
:
/ 工
I l I
。
撕蹴
铽
.
பைடு நூலகம்
女 雠
起
跑 £ 爱
长 皮
'
盘霸 量 邕£
@
一 一 ~ 、
、
、
一 ,
,
、
、 一 ,
.
图l 道路环境示意 图 给定道路如图 1 所示 , 宽度 为 5 e 中间铺设一条引导线 , 0 m, 导线通 有 5 — 5 m 频率为 2 K±2 0 10 A、 0 K的交变 电流 , 电流会在 周围空间产生 该 交变 电磁场 , 另外设置起止线下方左右两边各有三块磁钢 。 要求智能车 能够 跟踪地 面引导线高速运 动 , 同时识别 引导线 的变化 , 遇到弯道 、 十 字交叉等能够正确应对 , 测到起止线能及时停车 。 根据 以上要求 ,设计传感器模 块包括引导线检测和起止线 检测两 个子模块 , 分别实现导航信号跟踪 以及遇起止线 自动停车功能。 引导线 所产生 的交变 电磁场信息采用 电感 元件检测 ,从而获取智能 车在道 路 上的左右偏差 , 并及时调整 。起止线信 息采 用霍尔传感器检测 , 到信 测 号立即控制智能车停止。 3传 感器模块 电路设计 . 稳压电源是传感器模块稳定工作 的基 础 ,本设计中霍尔传感器 的
MRI的表面线圈1270954杨英健总结

•
在最近的一篇论文中,对于MRS应用,我们已经比较了CL线圈和FO8线
圈。MRS数据的获取来自成人的小腿,研究表明为了得到一个良好的SNR,
FO8线圈的直径应该选择为2R=10cm,两个线性电流elements的距离是
2s=1cm。
•
1 H PRESS 光谱集中在线圈表面的12mm,在大约20mm的区域以内,
• 大多数的MRI和MR光谱(MRS)研究已经应用了各种各样的射频表面线 圈,包括双重调谐线圈设计。近几年,专门设计的由很多表面射频线 圈组成的射频相控阵列已经用来提高信噪比(SNR),或者通过并行采 集技术才减少获取时间。
• 将电路频率调节到谐振状态的行为或过程;特指通过改变电感、电容 来实现频率的改变,以使接收设备(如收音机)的频率与所收的信号 发生共振的一种频率调节。
•
所谓的“蝶形线圈”提出两个或者更多的elements在给定的角度
和中心位置下彼此交叉。蝶形线圈提供的B1磁场分布的最大值是在线
性elements的交叉处,并且磁场的幅值沿着远离正交于线圈平面的方
向减小。最近,沿着蝶形线圈轴线的固有SNR的独立性进行了详细的
研究。
所谓的“8型”(FO8)线圈提出了至少两个中心线性电流,沿着 平行方向传导,两个线圈在彼此给定的距离放置。FO8线圈所提供的 B1磁场分布的最大值沿着相应的线性elements,呈带状分布。FO8线 圈最开始被提出是用于垂直磁场的的MRI系统中。有2篇文献已经表明 与标准的轴向磁场圆形圆环(CL)线圈进行比较,FO8线圈显示出在 沿着线圈Z轴在一个特定的位置产生了最大的B1磁场强度。
Fig1.Schematic design and prototypes of FO8 (B, D) RF coils tuned to 64 MHz and used for MRI testing with phantoms. The diameter is 2R = 100 mm and the separation between the linear parallel elements of the FO8 coil is 2s = 10 mm. We assume that the main B0 field is directed along the y-axis.
智能车磁导航中的信号调理电路设计
Ke r s s r a ;ma e i ed;c i;cr u t y wo d : ma t r c n g t fl ci o1 i i c
磁导航组是即将举办的 21 0 0年 第 五 届 全 国 大 学 生 “ 飞 思卡尔” 杯智 能 汽 车竞 赛 中 首 次 引入 。 赛 制 规 定 , 赛 道 中 新 在 心 线 下 铺 设 漆包 线 ,其 中通 有 2 H , 10m 的交 变 电 0k z/ 0 A = 流 , 率 为 (O 2 H , 流 为 5 ~ 5 A, 求 电磁 组 不 允 频 2 ± )k z 电 0 10m 要 许 通 过 获 取 道 路 的光 学 信 息 进 行 路 径 检  ̄ [ 只 能 通 过 检 测 l1 J。 1 漆 包 线 周 围 的 磁 场 来 引 导 小 车 沿 着 载 流 线 行 驶 。 从 工 作 频 率 、 出信 号 的 大 小 、 件 成 本 、 场 强 度 等 方 面 综 合 考 虑 , 输 器 磁 最 适 合 用 于磁 导 航 赛 道 检 测 的传 感 器 就 是 感 应 线 圈[1 测 2 。检 - 3 线 圈 安 装 在 智 能 车 体 上 后 . 能 车 前 进 过 程 中线 圈 与 导 航 载 智 流 线 之 间 的 空 间 方 位 决 定 了 线 圈 输 出 的 感 应 电 动 势 , 配 接 再 适 当 的 信 号 调 理 电路 ,将 检测 线 圈 输 出 的 电 信 号 经 过 放 大 、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
= ,
‘ 耵 ( X
() 1
其 中 为真空磁导率 ,为直导线 中的交变 电流, 。 i 以正弦 电流激励 ( 若为非正弦波 , 可看作是一系列正 弦 波 的线 性迭加 )i i(  ̄ ) 故 B为交 变磁 场 , 过 放 置在 导线 周 围的检 测 线 圈将 交 变磁 场转 化 ,=Ls 2 f , n i 通
收稿 日期 :0 00 -1 2 1 -31
作者简介 : 尹继武 (97 )男 , 16一 , 陕西省勉县人 , 陕西理 工学 院教授 , , 研究 方向为信号检测与处理 。 硕士 主要
第 4期
尹继武
磁导航 智能车 中的水平检测线 圈特 性分析
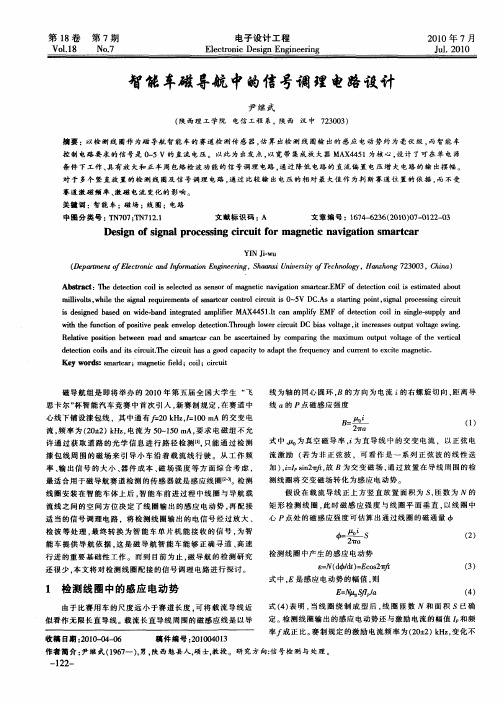
的侧 边 B C与载流 直导 线 ( 面直 线 ) 异 夹角 为 。 由于 矩形 检测 线圈 A C B D水 平 安 装 在 小 车 上 , 与 小 车方 并 向一致 , 以夹 角 就 代 表 了 小 车 与 赛道 的偏 向夹 所 角, 小车转向或赛道弯曲相当于夹角 变化。 在 检测 线 圈平 面 内取 一 点 P, P点到 A B的距离 为 ZP点 到 O , 0 的距 离 为 m, P点 到 载 流 直 导 线 的垂 直 距离 ( P 为 a 即 Q) 。则 : a =4y +( +mc s o ̄一/ia 。 ( ) s ) 2 n
P Q与载流 导线 所在 水平 面 夹角 为 , P点 附近 在 取一微 小面元 d , s 面元 d . 长 为 d, 为 d s的 z宽 m。则 电
流 i P点 磁感 应强 度 日在 面元 d 在 . s的法 向分量 B . : J为
=
图 1 载 流 线 附 近 水 平 放 置 的检 测 线 圈
D c2 1 e.0 0
Vo . 6 No 4 12 .
[ 章编号 】6 3— 9 4 2 1)4— 0 8— 4 文 17 24 (0 0 0 0 1 0
磁 导 航 智 能 车 中的 水 平检 测 线 圈特 性 分析
尹 继 武
( 陕西理工学 院 电信工程系 , 陕西 汉中 7 30 ) 2 0 3
B O C S0.
() 3 () 4
C S0= ( +m C S 一f i )/ O O n s a,
通 过面 元 d S的磁 通 量为 d, j S通 过 线 圈的磁 通量 为 : 4=B— , d
q
i n J 』 c D L
2l 0O年 l 2月 第2 6卷第 4期
陕西理 工学院学报 ( 自然科 学版 )
Ju a o hax U iesyo eh o g N t a SineE io ) o r l f ani nvrt f cnl y( a rl cec dt n n S i T o u i
为感应 电动势 。
2 水平放置的检测线 圈中的感应 电动势
如图 1在智能小车上水平放置的检测线圈为矩形 A C 线圈长为 , 为 , , B D, 宽 匝数为 J, 7 矩形线圈 \ , 的中线为 O 0点到载流直导线水平距离为 , 0, 线圈平面距载流直导线所在水平面垂直高度为 , 线圈 , ,
[பைடு நூலகம்摘
要 ] 推导 出磁 导航 智 能 车的水 平检测 线 圈输 出感应 电动 势与 线 圈相 对 于赛道 的位 置 、
夹角、 线圈尺度的函数 关系, 借助 M 山 m ta a e ac 软件展示 了关系曲线。结果表 明, i 影响检测线圈 输 出的主要 因素是 线 圈与 载 流线赛 道 的相 对位 置 ; 增加 线 圈数 量 可提 高定位 精度 ; 增加线 圈 匝 数 可提 高检 测灵敏 度 ; 别判 断 小车前 、 两端各 自相对 于赛 道 的位 置可 确定 车体 与赛道 的 夹 分 后
1 导线周 围的磁 场分布
由于比赛用车的尺度远小于赛道长度 , 可将载流导线近似看作无限长直导线 。载流长直导线周 围 的磁感应 线是 以导 线 为轴 的同 心圆环 , 感应强 度 B 的方 向为 电流 i 磁 的右螺旋 切 向 , 距离导 线 a的 P点 磁 感应强 度 为 :
. .
由于交变电磁场的频率为 2 H , Ok z对普通磁敏传感器而言, 频率较高 , 而磁场较弱 , 故最适合用于
磁导航赛道检测 的传感器就是感应线圈。感应线圈安装在智能车体上后 , 智能车前进过程中线圈与导
航载流线之间的空间方位决定了线圈输出的感应电动势 , 通过对二者 间的关系进行深入分析, 可以发现 影响检测灵敏度的各种因素 , 找出提高检测灵敏度的措施 , 为检测信号调理电路 的设计提供依据, 这是 磁导航智能车能够正确寻道 、 高速行进 的重要基础性工作。
角 , 用双检 测 线 圈差动 输 出可 消除赛道 交叉 的影 响 。 利
[ 关
键
词 ] 智 能车 ; 磁 场 ; 线 圈 ; 差 动
[ 中图纷类号 ] T 7 7 T 72 1 N 0 ;N 1 。
[ 文献标识码] A
近年来 , 全国大学生“ 飞思卡尔” 杯智能汽车竞赛规模和影响越来越大 , 国内高校师生广泛参与, 利 用赛道中央黑线寻道的光导航( 光电组、 C C D组) 已有大量研究和实践。但最新变化是 , 2 1 在 00年第五 届竞赛中, 新增加了磁导航组 , 在赛道中心线下铺设直径 0 1 0 3m 漆包线 , 中通有,= 0k z . — . m 其 2 H , , 10m 的交变电流, = 0 A 频率范 围2 2k z电流范围5 10m 要求 电磁组不允许通过获取道路的 0± H , O一 5 A, 光学信息进行路径检测¨ , J只能通过检测漆包线周 围的交变电磁场来 引导小车沿着载流线行驶 。而到 目前为止 , 导航 的检测 研究 还 很少 -3, 磁 2 本文 将对 此工程 问题 进行 全 面深 入 的探讨 。 . J