多源图像实时配准融合系统
图像配准
图像配准介绍----图像配准的应用领域
• 计算机视觉
--视频监控----对跟踪的目标区域进行配准
--人脸识别
图像配准介绍----图像配准的应用领域
• 医学 --不同模态的(CT,MRT)----配准后进行融合可以得到 更多的信息 --单模态-----同一病人不同时间,不同病人之间的
图像配准介绍----图像配准的应用领域
刚体变换是平移、旋转与缩放的组合,适用于具有相同视角,但 拍摄位臵不同的来自同一传感器的两幅图像的配准。刚体变换模 ( x2 , y2 ) 分别为参考图像和待配准图像中对应的 型下,若点 ( x1 , y1 ) , 两点,则它们之间满足以下关系:
x2 cos y sin 2
图像配准技术
郑雪梅
内容概要
1.图像配准介绍
2.图像配准的分类
3.图像配准的一般步骤 4.图像配准的主要方法 5.部分配准算法的实验结果 6.图像配准的评价
图像配准介绍----图像配准的定义
• 什么是图像配准? 图像配准可以视为源图像和目标图像关于空间和灰度的映射关系:
I 2 ( x, y) g ( I1 ( f ( x, y)))
等作为两幅图像配准的参考信息。
图像配准的分类
• 按图像配准的应用领域分类 --军事,医学,遥感,计算机视觉 按配准图像的来源分类 --不同视点的图像配准(多视点分析):目的在于获取更大范围的 二维视角或重构被摄场景的三维信息。应用实例:遥感—被摄区域 图像镶嵌、计算机视觉—形状恢复; --不同时间的图像配准(多时段分析):目的在于寻找并度量两幅 不同时间内拍摄的图像中场景的变化。应用实例:遥感—区域规划、 计算机视觉——运动跟踪、医学成像—肿瘤病变检测、白天和黑夜 的场景以及夏天和冬天的图像特征研究;
具有SIFT描述的Harris角点多源图像配准

Absr c : u t s n o ’ g e it t n i e y d f c l b c u eo erd fe e ti g n rn i l s Re e rn o t e t a t M l — e s ri i ma er g sr i sv r i u t e a s f h i i r n ma ig p i cp e . f ri g t h ao i t r g sr t n o fa e n ii l ma e , e itai n a g r h i p o o e a e n te Ha s c m e t I T e i a i fi r r d a d v s e i g s a r g s t l o i m s r p s d b s d o h r o rwi S F t o n b r o t i h
作 为特征 点; 然后通过改进 SF IT对特征点 的描述方法 , 采用 圆环 结构 算子对 Har 角点进行 类 SF rs i IT的特征描述 ; 最后利用双向最近邻 方法进行 匹配,通过最小二乘法 实现 图像的配准 。实验证 实了算法配准的精确性 、快速性和
稳 定 性 ,具 有较 好 的 配 准效 果 。
融 合 了 Ha i 与 SF rs IT各 自的优 点 ,本文 实验 证 明其具 有 良好 的 配准效 果 。
1 多 尺 度 H r s 点提 取 ar 角 i
实 际 图像 中的 特征 角 点常 常 出现 在 不 同的尺 度范 围上 ,在较 大尺 度下 能更 可靠地 消 除误检 角点以确 保
基于VME总线视频融合系统

第 1 卷 第 2期 1 20 年 4 月 06
文 章 编 号 : 10 —2 9(0 6 0— 140 0 70 4 2 0 ) 20 2 —4
电路 与 系 统 学 报
J OUR NALOFC1 RCUI TSAND YS EM S
23 视频采集模 块与系统显示控制模块 . 1 )视频采集模块 设计用于实现对双输入通 道视频信号的 同步、数字 化和传送 。
特定 的应用环 境,设计专用的总线接 口,通用性差 , 并未采用实 时操作 系统和 高速总线 的软硬件平 台,
从系统结构上 保障实时图像 融合处理 的可靠性 。本文提 出并研 制了双通道高速实时视频 图像配准 融合 系统 , 其系统 结构 是基 于V Wok实时操作系统和VME 4 标准总线 的多D P x rs 6x S 分布式体系 , 具有 实时 、 高速 、通用 、标准化 的特点 。
2 系 统 构 成 和 原 理
21 参数分析 . 实时完成双通道视频采集频率为2 帧/ ,每帧 图像 为2 6 2 6 5 秒 5 x 5 分辨率 ,经过A D1位转换速 率为 / 4 IMH ,图像帧数据量为:2 6 2 6 2 l 17 字节 。时钟信号 1MH ,帧频信 号每4 ms O z 5 x 5 x= 30 2 0 z 0 有一脉冲 , 653 ms . 6 传送数据 ,空闲3 . 6 m 后 ,产生下一帧信号 。 5 3 44 s 4 因此系统 总线 传送速率应大于653 M字/ ,D P . 6 5 秒 S 应在4 ms 完成 图像传送 、融合处理 ,采用 0 t  ̄ V 6 x(E E 0 4 2 ME 4 IE 1 1 ,3 位数据 、D 速 率2 MB s MA 0 /)总线 、V WOR S x K 实时操 作系统、A S . S 0 D PT 1 1 芯片来保证双 图像 的配准和融合 ,
多源传感器信息融合技术
§8.3 卡尔曼(Kalman)滤波 Kalman 滤波器是从被提取信号有关测量中通过算法估计出所需信号,其中被估计信号 是由带有白噪声的激励引起的随机响应,激励源与响应之间的传递结构(系统方程)已知,
3
. . .
目 标 的观 测 分 类 与说 明
图 8-1 基于 Bayes 统计理论的信息融合过程
1
层(图像分割和边缘特征等提取之前)、 特征级融合和决策级融合(各特征独立属性说明之 后), 现有的融合算法主要是基于以上三个层次进行研究的。 (3) 应用目的:信息融合技术首先应用于军事领城,然后又逐渐发展到非军事领城。 它是 一个在多个级别上对传感器数据进行综合处理的过程, 每个处理级别都反映了对原始数 据不同程度的抽象,包括从检测到威胁判断、武器分配和通道组织的完整过程。其结果 表现为在较低级别对状态和属性的评估和在较高层次上对整个态势、威胁的估计。 这 一过程强调信息融合的核心是指对来自多个传感器的数据进行多级别、多方面、多层次 的处理,从而产生新的有意义的信息。对于非军事应用领域,信息融合是对多个传感器 和信息源所提供的关于某一环境特征的不完整信息加以综合和提升,以形成相对完整、 深入和一致的感知和认识,从而实现更加准确的识别和判断功能。 自上而下,表格 6.1.各列的分类按照每行有着某种对应关系,虽然这种关系并不严格甚至交 叠,但往往是可以对比并互相参照,反映了从低级到高级信息融合技术的处理层次。 并非多个信息源进行融合总是能够得到更好的和有用的信息。 应用的信息融合方法是 十分关键的, 它直接决定融合质量。 信息融合最基本的方法是将所有的输入数据在一个公共 当的形式输出和表达这些 数据。 应使用的基本方法包括概率统计、卡尔曼滤波、(有序)加权平均、证据理论、神经 网络和人工智能等许多解决途径。 8.2. 贝叶斯估计 贝叶斯(Bayes)方法用于多传感器信息融合时, 是将多传感器提供的各种不确定性信息表 示为概率, 并利用 Bayes 条件概率公式对它们进行融合,从而形成决策的一种方法。 8.2.1. Bayes 条件概率公式 设 A1 , A2 ,..., Am 为样本空间 S 的一个划分, 即满足 (1) Ai ∩ A j = φ ( i ≠ j ); (2) A1 ∪ A2 ∪ ... ∪ Am = S ; (3) P ( Ai ) > 0 (i = 1, 2,..., m) 。 则对任一事件 B, P ( B) > 0 ,满足下面 Bayes 公式:
图像融合的三大方法
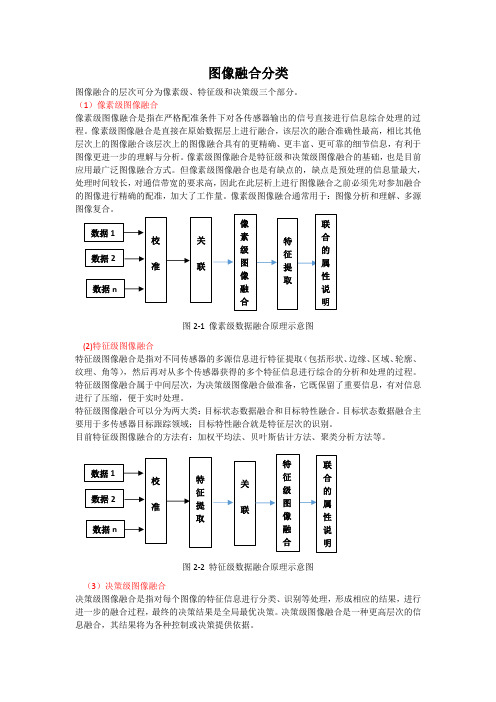
图像融合分类图像融合的层次可分为像素级、特征级和决策级三个部分。
(1)像素级图像融合像素级图像融合是指在严格配准条件下对各传感器输出的信号直接进行信息综合处理的过程。
像素级图像融合是直接在原始数据层上进行融合,该层次的融合准确性最高,相比其他层次上的图像融合该层次上的图像融合具有的更精确、更丰富、更可靠的细节信息,有利于图像更进一步的理解与分析。
像素级图像融合是特征级和决策级图像融合的基础,也是目前应用最广泛图像融合方式。
但像素级图像融合也是有缺点的,缺点是预处理的信息量最大,处理时间较长,对通信带宽的要求高,因此在此层析上进行图像融合之前必须先对参加融合的图像进行精确的配准,加大了工作量。
像素级图像融合通常用于:图像分析和理解、多源图2-1像素级数据融合原理示意图(2)特征级图像融合特征级图像融合是指对不同传感器的多源信息进行特征提取(包括形状、边缘、区域、轮廓、纹理、角等),然后再对从多个传感器获得的多个特征信息进行综合的分析和处理的过程。
特征级图像融合属于中间层次,为决策级图像融合做准备,它既保留了重要信息,有对信息进行了压缩,便于实时处理。
特征级图像融合可以分为两大类:目标状态数据融合和目标特性融合。
目标状态数据融合主要用于多传感器目标跟踪领域;目标特性融合就是特征层次的识别。
目前特征级图像融合的方法有:加权平均法、贝叶斯估计方法、聚类分析方法等。
图2-2特征级数据融合原理示意图(3)决策级图像融合决策级图像融合是指对每个图像的特征信息进行分类、识别等处理,形成相应的结果,进行进一步的融合过程,最终的决策结果是全局最优决策。
决策级图像融合是一种更高层次的信息融合,其结果将为各种控制或决策提供依据。
进行Array图2-3决策级数据融合原理示意图。
多源数据融合构建实景三维模型科技项目实施方案

多源数据融合构建实景三维模型科技项目实施方案实施方案概述:实施方案旨在利用多源数据融合技术,构建实景三维模型科技项目。
该项目将利用航拍影像、卫星图像、地面激光扫描数据等多种数据源,通过融合处理和建模技术,生成高精度、真实性强的实景三维模型,可应用于城市规划、土地利用、智慧交通等领域。
一、项目需求分析:1.1 数据需求分析:首先,分析需要使用的数据源,如航拍影像、卫星图像和地面激光扫描数据。
其次,对数据进行质量评估,准备高质量的数据集进行模型构建。
1.2 模型要求分析:根据项目需求,确定模型的精度要求、真实性要求和应用场景要求。
例如,需要高精度的地形模型、建筑物模型和道路模型等。
二、技术方案设计:2.1 数据处理方案:根据不同数据源的特点和要求,设计数据融合处理流程。
包括数据预处理、数据配准和数据融合等步骤。
例如,根据航拍影像和卫星图像的配准关系,进行像素级别的配准,然后使用地面激光扫描数据进行高程配准。
2.2 模型构建方案:根据模型要求,设计模型构建流程。
包括模型提取、模型重建和模型融合等步骤。
例如,根据影像和激光扫描数据,利用影像解译和点云配准技术提取地面特征、建筑物特征和道路特征,然后重建成三维模型。
2.3 软件工具选择:选择合适的软件工具来实现数据处理和模型构建。
例如,使用ArcGIS、ENVI、Photoscan等软件进行数据处理和模型构建。
三、实施计划安排:3.1 数据采集和准备:根据需求,进行航拍影像、卫星图像和地面激光扫描数据的采集和准备。
确保数据的质量和完整性。
3.2 数据处理和模型构建:按照技术方案设计的流程,进行数据处理和模型构建。
包括数据预处理、数据配准、数据融合、模型提取、模型重建和模型融合等步骤。
3.3 模型验证和评估:对生成的实景三维模型进行验证和评估,评估其精度和真实性,确保满足项目需求。
3.4 模型应用和展示:将生成的实景三维模型应用于城市规划、土地利用、智慧交通等领域,提供科学决策支持。
(完整版)多源信息融合技术的起源发展与研究应用
1.多源信息融合技术的起源发展与研究应用1.1多源信息融合的概念多源信息融合(multi-source information fusion)亦称多传感器信息融合,是一门新兴边缘学科。
多源的含义是广义的,包含多种信息源如传感器、环境信息匹配、数据库及人类掌握的信息等,信息融合最初的定义是数据融合,但随着信息技术的发展,系统信息的外延不断扩大,已经远远超出了数据的简单含义,包括了有形的数据、图像、音频、符号和无形的模型、估计、评价等,故学术界、技术界均认为使用信息融合更能代表其含义。
多源信息融合的优势可以表现在密集性、有效性、互补性、冗余性、实时性、低成本性、高适应性等多个方面。
1.2多源信息融合技术的起源与发展这一概念是在20世纪70年代提出的。
当时新一代作战系统中依靠单一传感器提供信息已无法满足作战需要,必须运用多传感器集成来提供多种观测数据,通过优化综合处理提供相对准确的战场信息,从而更好地把握战场态势。
在多传感器系统中,由于信息表现形式的多样性,信息数量的巨大性,信息关系的复杂性,以及要求信息处理的及时性,都已大大超出了人脑的信息综合处理能力,所以多传感器数据融合(Multi-sensorData Fusion简称 MSDF)便迅速发展起来。
20多年来,MSDF技术在现代 C3I(指挥、控制、通信与情报 Command,Control, Communication and Intelligence)系统中和各种武器平台得到了广泛的应用[3],在工业、农业、航空航天、目标跟踪和惯性导航等民用领域也得到了普遍关注。
国外对信息融合技术的研究起步较早。
第二次世界大战末期,高炮火控系统开始同时使用了雷达和光学传感器,这有效地提高了高炮系统的瞄准精度,也大大提高了抗恶劣气象、抗干扰能力。
现代信息融合概念70 年代初开始萌芽.最初主要在多种雷达同时运用的条件下执行同类传感器信息融合处理,以后逐渐扩展。
70 年代末期开始引入电子战、ESM 系统,引起人们高度重视。
多源遥感图像融合方法研究
文章编号 :0 6— 3 8 2 1 ) 2— 2 9— 4 10 9 4 (0 1 1 0 8 0
计
算
机
仿
真
21年1月 0 1 2
多源遥 感 图像 融 合 方 法研 究
郑 影
( 齐齐哈尔 大学计算机与控制工程学 院, 黑龙江 齐齐哈尔 1 10 ) 6 0 6 摘要 : 研究多源遥感图像的融合技术 , 不同传感 器获取 的遥感 图像像 素信息有很大差 异。当所要融合 的图像 是多源遥 针对 感图像 时 , 应提取多图像 的有效信 息, 组合 出高质量 的图像 。传统 I S图像 融合方法无法避 免多源图像像 素不 匹配带来的 H 有效像 素丢失 , 造成融合 图像模糊 , 清晰度不 高的问题 。提 出一种基 于 C n ul 变换 的遥感 图像 融合方法 , 过对图像进 ot r t o e 通 行 C n u e 变换后提取各 源图像 的特征信息 , ot r t ol 并计算提取特征所包含 的信息 量, 选取高信息量 的特征进行融合 , 最后 通过 进行 C n u e逆变换 即得 到多源融合 图像 , ot r t ol 利用信息量融合配准的方法就避免 了直接对不 匹配像 素运算而造成 的有 效像
后提取各源 图像 的特征信息 , 并计算提取特征 所包含 的信 息 量, 选取高信息量的特征 进行融合 , 最后 通过进 行 C n ult ot r o e 逆变换 即得 到多源融合 图像 , 这样 利用信息量 融合配准 的方
的遥感 图像融 合方 法 , 过对 图像进行 C nor t 通 o t l 变换 后提 ue 取各 源图像 的特征 信息 , 并计 算提 取特征 所包含 的信息 量 , 选取 高信息量 的特 征进行 融合 , 最后通 过进 行 C n ult ot r 逆 o e 变换 即得 到多源融合 图像 , 这样 利用信息量融合 配准的方法
图像融合的原理及基本步骤
所得到的值为新影像在该坐标上的像元值。像素级 融合对原始图像及预处理各阶段上所产生的信息分
别进行融合处理, 它主要是增加图像中有用的信息 成分, 改善图像处理效果。具有较高的精度, 但是需
要处理的数据量大、代价高、数据传输量大、抗干扰 能力差、对传感器的要求高等。
图像融合首先要求多源图像精确配准, 分辨率 不一致时, 要求重采样后保持一致; 其次, 将图像按 照某种变换方式分解成不同级的子图像, 同时, 这种 分解变换必须可逆, 即由多幅子图像合成一幅图像, 即位图相融合。这时多幅子图像中包含了来自其他 需要融合的经图像变换的子图像。 2 影像融合的基本步骤
合的优点是信息丢失少, 缺点是计算量大、处理速度
慢。特征级融合是指对图像的特征进行的融合, 对不
同图像进行特征提取, 按各图像上相同类型的特征
进行融合处理, 典型的图像特征包括边缘、角点、线
等。特征级图像融合与像素级融合相比信息丢失较
多, 但计算量较小。决策级融合是最高层次的融合,
首先按照应用的要求对图像进行初步的分类, 然后
X 收稿日期: 2011- 11- 15 作者简介: 王云男( 1986- ) 女, 内蒙古赤峰人, 测绘助理工程师, 长期从事矿山测绘工作。
·112·
王云男, 等 · 图像融合的原理及基本步骤
来改善多光谱图像空间分辨率的融合中, 由于多光 谱图像和全色图像时相相差较大, 它们之间的像素 灰度值也明显不同, 如果直接对两者进行融合, 则会 造成多光谱图像的原有光谱信息的丢失或破坏, 因 此有必要在融合之前进行直方图匹配。
像素级
小
差
高
差
差
小
低
特征级
中
中
中
遥感envi图像镶嵌和融合心得体会
遥感envi图像镶嵌和融合心得体会遥感 envi 图像镶嵌和融合心得体会,通过对 envi 软件与遥感图像处理的有机结合使二者相互匹配完成的。
遥感图像在很大程度上取决于该地区图像资料数据质量的优劣和丰富程度。
因此对于遥感图像镶嵌是有效的处理方法。
而遥感图像的分类标准也为遥感图像融合打下基础。
本文将对如何运用遥感 envi 进行图像拼接和融合做详细介绍,最后再次总结遥感 envi 软件的特点以及其应用。
关键词:遥感;遥感 envi;图像;拼接;融合遥感 envi 图像融合简介遥感 envi图像融合,就是根据不同来源的遥感影像信息的空间分布和特征属性,利用遥感数字图像分析处理技术(即计算机视觉)和专业知识对遥感影像数据进行处理,使之成为具有一定内容的图像或视频流,可供研究人员加工利用。
同时,还要对这些图像流的某种空间变化规律和模式进行揭示和解释,并且产生新的信息内涵的技术和方法。
由于影像数据采集主体的多样性、影像格式与内容的复杂性等原因,传统遥感数据与空间数据库系统结合已不能满足实际需求。
基于遥感技术和网络技术的新型遥感数据管理与服务平台的出现,为解决这一问题带来了契机。
由此可见,借助遥感影像融合,将多源遥感数据整合到一个有序的框架中,为用户提供快速获取所需数据服务是一条切实可行的途径。
遥感图像拼接原理1.1目标检测首先选择一幅较小的空白遥感图像作为待处理的源图像。
1.2图像拼接在所述待处理的源图像上进行像素的选择和排列,并调整图像大小,从而达到所期望的效果。
然后执行所述的空白遥感图像检测算法,以确保源图像能够满足拼接的需求。
1.3像素间的空间配准在确定源图像无冗余或冗余很少情况下,通常采用直线配准法进行像素的位置和几何尺寸的预处理,以达到理想的配准精度。
在拼接中也需要进行配准操作。
通过遥感数据拼接技术将空间分辨率相近的卫星影像进行叠加合成,最终形成满足要求的影像拼接。
遥感图像融合简介遥感图像融合,就是根据不同来源的遥感影像信息的空间分布和特征属性,利用遥感数字图像分析处理技术(即计算机视觉)和专业知识对遥感影像数据进行处理,使之成为具有一定内容的图像或视频流,可供研究人员加工利用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 1 技术参数分析 根据融合系统技术参数要求实时完成双通道视频采集
频率为 50 帧/ 秒 ,每帧图像为 256 ×256 分辨率 ,经过 A/ D14 位转换速率为 10 MHz ,图像数据以 10 M 字/ s 速率连续输出 。 图像数据量为 : 256 ×256 ×2 = 131 072 字节 。时钟信号 10 MHz ,帧频信号每 20 ms 有一脉冲 ,6. 553 6 ms 传送数据 ,空闲 13. 446 4 ms 后 ,产生下一帧信号 。
Key words : image registration ; image fusion ; real2time operating system ; computer architecture
1 引 言
多传感器图像融合技术是在信息融合技术的理论基础 上发展起来的一种图像处理新技术 。由于可以有效综合多 源图像信息的互补性和冗余性 ,因此融合图像包含比任一输 入通道图像更丰富的信息 ,具有更高的可靠性 ,有利于提高 对图像信息的分析和识别能力 ,所以近年来成为国际学术界 图像处理研究领域的一个热点 。融合技术使多源图像信息 资源的利用率得以最大限度的发挥 。多源图像配准和融合 技术的理论研究已经取得了很多成果 ,但是可实用的图像融 合系统目前还处于实验研究阶段 。图像融合技术应用的突 出障碍是实时性与处理速度 。对于像素级融合 ,多源图像相 关像素的配准结果直接影响融合图像质量 ,而基于最大相关 和相位相关方法的图像配准方法 ,以及图像多尺度塔形分解 与重构的多分辨图像融合算法 ,其巨量数据处理使得图像融 合处理系统的研制开发具有相当高的难度 。国外有关实时 图像融合系统的报道甚少 ,国内的有关研究[1 - 5] 局限于利用
4 配准和融合算法
图 3 视频采集模块结构示意图
图像采集部分 , 由视频放大 、钳位 、增益控制 、采样保持 等功能的专用视频 ADC 芯片构成高性能视频 ADC 单元 。该 单元分辨力为 14bit , 采样时钟由板上数字锁相环电路提供 。 由于图像配准 、融合针对同场景的两路视频图像的处理 , 所以 采集板上设计有两套完全独立的 ADC 单元 ,并保持同步 。为 确保视频采集过程中 , 每视频行的有效采样点精确起始于同 一位置 ,数字锁相环电路 (PLL) 产生像素时钟 ,锁相环的输出 频率由环路分频器确定 , 两者均由 CPLD 实现 ,可依需要编程 改变 。为了满足 CCIR 标准电视 (625 行 ,50 Hz ,隔行扫描) ,分 频系数为 640 ,行同步脉冲为 64μs ,锁相电路提供与输入视频 行同步的 10 MHz 像素同步时钟 ,实现采样同步定位 。两路采 集的 14 位图像数据 ,经过 VME64x 总线的 P2 口输出到处理模 块帧存储器 FIFO 中 ,其写入时钟由像素时钟 、帧同步 、行同步 逻辑组合产生 ,这样设计无需产生地址 ,并且当 FIFO 满时 ,不 能写入新的一帧图像 ,与“乒乓”帧存结构相比控制简单 ,电路 中的同步 、逻辑控制等选用芯片 EPM7256SQC208 实现 , 同时支 持 5VTTL 和 LVTTL 电平 I/ O 标准 。
总线写入视频显示模块输出在终端监视设备上 。 2. 3 VME 总线和实时多任务操作系统 VxWorks
VME 总线体系结构 ( IEEE1014) 可以构成分布式多处理 机系统 。VMEbus 总线是一种非复用的 32 位异步总线 ,数据 宽度为 32 位 ,地址为 32 位 ,寻址范围 4GB 。在 DMA 块传送 方式下 ,数据传送可达 40MB/ s。
·186 ·
ቤተ መጻሕፍቲ ባይዱ
系统工程与电子技术
2005 年
ms 内完成图像传送、融合处理 ,所以采用 VME64x 总线、VxWorks 操作系统、ADSP2TS101 芯片来保证双图像的配准和融合。 2. 2 系统组成
图像配准融合系统硬件由图像采集 、处理模块和系统显 控模块 3 部分组成 ,3 个模块电路板通过 VME64x 背板总线 连接 。这样设计 ,使处理模块相对独立 ,DSP 芯片的选择范 围广 ,当更高性能的 DSP 芯片推出后 , 只需升级 DSP 处理板 就可以进一步提高系统的图像处理能力 。软件包括嵌入式 实时操作系统 VxWorks ,应用程序包括实时任务管理调度 、融 合结果的显示 、DSP 完成的图像配准和融合算法 。
系统工作过程可简述为 : 从 CCD 摄像机和红外成像仪 输入的模拟视频信号 , 经数字化采集 、拼接后 ,存入帧存储 器 FIFO , 首先由一个 DSP 图像处理机读取帧存中的图像数 据 ,对两种图像进行配准 ,然后配准数据传送到另一 DSP 中 , 完成对图像的融合运算 , 处理完成的融合结果经过 VME64x
高性能数字信号处理器提高处理速度 ,针对特定的应用环 境 ,设计专用的总线接口 ,通用性差 ,并未采用实时操作系统 和高速总线的软硬件平台从系统结构上保障实时图像融合 处理的可靠性 。本文提出并研制了双通道高速实时视频图 像配准融合系统 ,其系统结构是基于 VxWorks 实时操作系统 和 VME64x 标准总线的多 DSP ( TS101) 分布式体系 ,具有实 时 、高速 、通用 、标准化的特点 。
实时系统指能在确定的时间内执行计算或处理功能并 对外部的异步事件作出响应的计算机系统 。确定的时间是 最根本的要求 ,系统的正确性不仅取决于处理结果逻辑的正 确性 ,还取决于此结果的响应时间 。
操作系统是 VxWorks 实时多任务操作系统 ,事件响应时 间为 10 微秒量级 ,有较强的实时性 。 2. 4 图像数据处理模块
关键词 : 图像配准 ; 图像融合 ; 实时操作系统 ; 计算机体系结构 中图分类号 :TP391. 41 文献标识码 :A
Real2time multisensor image registration and f usion system
LIU Wei2guang , CUI Jiang2tao , ZHOU Li2hua
这样系统总线传送速率应大于 6. 553 6 M 字/ s ,DSP 应在 20
收稿日期 :2003 - 10 - 27 ; 修回日期 :2004 - 06 - 21 。 基金项目 :陕西省科技攻关项目 (2003k05 - G17) 作者简介 :刘卫光 (1966 - ) ,男 ,高级工程师 ,博士研究生 ,主要研究方向为多传感器信息融合 ,图像处理 ,多媒体技术 。
(西安电子科技大学多媒体技术研究所 , 陕西 西安 710071)
摘 要 : 多源图像配准融合方法的理论研究较多 ,已有的融合系统往往针对特定应用通用性差 ,并且不具备实 时性 ,而具有并行分布式计算机体系结构的通用实时图像融合系统有望解决这一问题 。该系统的核心是基于标准 总线上实时操作系统 ,以 ADSP 并行完成多源图像实时配准和融合 ,CPLD 实现总线和视频同步控制 。具有运算能力 强 、I/ O 带宽大 、可扩展性和通用性强的特点 ,并以此构成了高速实时融合系统 。实用表明此方案是可行的 。
速内存 ,但不能满足复杂数字图像处理(如多分辨图像分解与重 构) 过程中 ,大数据量缓存的要求 ,因此 ,DSP 配置高速同步 128M SDRAM ,总线时钟频率可达 133MHz。DSP 板上设计标准 VME64x 接口 , 其控制逻辑由 CPLD 产生 ,包括数据和地址总线、 双口 RAM 读/ 写控制信号、FIFO 读/ 写信号以及 DMA 控制、外中 断等信号。DMA 传输帧数据(20 MB/ s) 和中断时序如图 2 所示。
( Institute of Multimedia Technology , Xidian University , Xi’an 710071 , China)
Abstract : The existing researches of image fusion are mostly focused on theory. The universality of conventional fusion system which has no real time is highly limited because it is often designed for a special purpose. A general2pur2 pose real2time image registration and fusion system based on parallel computer architecture may be a hopeful solution. Its kernel component is real2time operating system of standard bus. TS101 DSP serves as the CPU to perform parallel registration and fusion. CPLD is designed to control VME bus and video synchronization. The architecture has charac2 teristics of strong computational capability , broad I/ O bandwidth and expansibility. The results of experiments indicate that this system works perfectly.
2005 年 1 月 第 27 卷 第 1 期
系统工程与电子技术 Systems Engineering and Electronics
文章编号 :1001Ο506X(2005) 01Ο0185Ο04
多源图像实时配准融合系统
Jan. 2005 Vol127 No11
刘卫光 , 崔江涛 , 周利华
图 2 VME 总线 DMA 和中断时序
第 27 卷 第 1 期