混凝土泵车臂架D-H矩阵分析与仿真
基于OpenGL的混凝土泵车智能臂架系统仿真

S N Xi je Y a F I h mi, N i fe U a i, E Hu ,E u n RE Q n o S g i
(c o l f tmain, o te s iest, yL b rtr fMe srme ta d C nrl f E S h o o t S uh atUnv ri Ke a oaoyo aue n n o to o Au o y o CS
o ns f d ctn S uhat n e i , a n 10 6 C ia f Miir o u ao , otes U i rt N mig2 0 9 ,hn ) t y E i v sy
Ab t a t h mp e na in o e i tl g n o m i lt n s se o e c n r t u a e n Op n n r ・ s r c :T e i lme t t f h n el e tb o smu ai y tm ft o c e e p mp b s d o e GL i i t o t i o h s o d c d i h s p p r i t c n ie n h r i g c a a t r t s a d f n t n lr q i me t f t e c n r t u u e n t i a e .F r l o sd r g t e wo k n h r c e si n u ci a e u r s y, i i c o e n s o o c ee p mp, h t e smu ai n p af r i sa l h d u i g Op n r p i sl r r n h n ef c t s a + o h o n a in h i lt lt m se t b i e sn e GL g a h c i a a d t e it r e wi Vi lC +. n te f u d t o o s b y a h u o o ep n i lso t n a d t e mo e ft e i tl g n o m. h e e a r me r st e e e u a l l d i g d — ft r cp e fmo i n h d lo n e l e t o T e g n r l a wo k i h x c t b ef e a d n y h i o h i b f i n mi i k l rr , y d s nn e merc b sc l r r ,g o t c k r e i r r , e GL g a h c e d rn i r r n a c l i a b e i i g g o t a i i a n b y g i b y e me r en l b a Op n r p is r n e g l a a d i l y i b y a g r h l r r , n y of r g u e tra e F rh r mo e t e a g r ms o t n i cu i g t e ma u lc n r l t e lo t m i a a d b f i s ri e f c . u t e r ,h l o t fmo i n l d n h n a o t , i b y en n i h o o h s l a t gsr t h o h n n u o t o t l r ic s e . h x e me t l e u ss o h tt e smu ai n s s m ef c i t c rs r k a d a t mai c n r e ds u s d T e e p r n a s h h w ta h i l t y t - n e i c o a i r o e c n ds l y t emo e n f h o m n e f h a i i t ft e ag r h a ip a v me t e b o a d v r y t e f s l y o l o t m t e d y i tra e h ot i e b i h i l a f n l e f c . l r i n Ke r s i tl g n o m y tm ;Op n y wo d : e l e t o s s n i b e e GL;smu a in;d n mi i k l r r i lt o y a cl i a n b y
《混凝土泵车臂架系统动力学分析及振动主动控制研究》范文

《混凝土泵车臂架系统动力学分析及振动主动控制研究》篇一一、引言混凝土泵车是建筑工程中常用的设备,而其臂架系统是整个设备的重要组成部分。
随着混凝土泵车向着高效率、高自动化、高精度的方向发展,臂架系统的动力学性能和振动控制问题显得越来越重要。
因此,本文将重点对混凝土泵车臂架系统的动力学特性和振动主动控制技术进行研究,旨在为实际工程提供一定的理论支撑和实践指导。
二、混凝土泵车臂架系统动力学分析1. 动力学模型构建为了分析混凝土泵车臂架系统的动力学特性,我们首先需要建立相应的动力学模型。
在此过程中,应考虑到泵车的机械结构、材料属性、工作条件等因素。
通过建立多体动力学模型,我们可以更准确地描述臂架系统的运动规律和受力情况。
2. 动力学特性分析通过对所建立的动力学模型进行数值模拟和实验验证,我们可以得到混凝土泵车臂架系统的动力学特性。
具体包括臂架系统的固有频率、模态振型、阻尼比等参数。
这些参数对于评估臂架系统的稳定性和可靠性具有重要意义。
三、振动主动控制技术研究1. 振动主动控制原理振动主动控制技术是一种通过外部能量输入来抑制或消除系统振动的技术。
在混凝土泵车臂架系统中,我们可以通过传感器实时监测臂架的振动情况,然后通过控制器输出相应的控制信号,驱动执行机构对臂架进行主动控制,从而达到减小或消除振动的目的。
2. 振动主动控制策略针对混凝土泵车臂架系统的振动问题,我们可以采用多种控制策略。
例如,基于现代控制理论的PID控制、模糊控制、神经网络控制等。
这些控制策略可以根据实际需求进行选择和组合,以达到最佳的振动控制效果。
四、实验研究及结果分析为了验证所提出的动力学分析和振动主动控制技术的有效性,我们进行了实验研究。
首先,我们搭建了混凝土泵车臂架系统的实验平台,然后通过传感器实时监测臂架的振动情况。
接着,我们采用不同的控制策略对臂架进行主动控制,并记录相应的实验数据。
最后,我们对实验数据进行分析和比较,评估各种控制策略的优劣。
《2024年混凝土泵车臂架系统动力学分析及振动主动控制研究》范文
《混凝土泵车臂架系统动力学分析及振动主动控制研究》篇一一、引言混凝土泵车作为现代建筑领域的重要设备,其臂架系统动力学特性及振动控制问题一直是研究的热点。
本文旨在分析混凝土泵车臂架系统的动力学特性,并对其振动主动控制进行研究,以提高泵车的工作效率和稳定性,保障施工安全。
二、混凝土泵车臂架系统动力学分析2.1 动力学模型建立混凝土泵车臂架系统是一个复杂的机械系统,其动力学模型需要考虑多个因素,如臂架的几何形状、材料属性、负载情况等。
本文通过建立多刚体动力学模型,对臂架系统的运动过程进行描述。
该模型将臂架分为若干个刚体段,考虑了各段之间的连接方式及运动约束,从而更准确地反映了臂架系统的实际运动情况。
2.2 动力学特性分析通过对动力学模型进行数值仿真,可以得出混凝土泵车臂架系统的动力学特性。
包括臂架在不同工况下的运动轨迹、速度、加速度等参数。
同时,还可以分析臂架系统在不同负载、不同速度下的动态响应,为后续的振动主动控制提供依据。
三、振动主动控制研究3.1 振动产生原因及危害混凝土泵车臂架系统的振动主要来源于机械系统内部的动态激励和外部环境的干扰。
振动不仅会影响泵车的工作效率,还会对结构造成损伤,甚至引发安全事故。
因此,对臂架系统的振动进行主动控制具有重要意义。
3.2 主动控制策略本文提出了一种基于自适应滤波的振动主动控制策略。
该策略通过安装在臂架上的传感器实时监测振动信号,并将信号传输至控制系统。
控制系统根据信号特征,通过自适应滤波算法计算控制指令,驱动执行机构对臂架系统进行主动控制,以减小振动。
3.3 控制效果分析通过在实验室和实际工况下对控制策略进行测试,发现该策略能有效减小混凝土泵车臂架系统的振动。
在实验室条件下,与未进行控制的臂架系统相比,采用该策略的臂架系统振动幅度降低了约30%。
在实际工况下,该策略同样取得了良好的控制效果,有效提高了泵车的工作效率和稳定性。
四、结论本文对混凝土泵车臂架系统的动力学特性及振动主动控制进行了研究。
基于刚柔耦合模型的混凝土泵车臂架系统动力学仿真

第2 7卷 第 1 2期
21 年 1 01 2月
吉 林 工 程 技 术 师 范 学 院 学 报
Ju a f in T ah r n tueo gn eiga dT c n lg o r lo l ec esIsi t fEn ie r n e h oo y n Ji t n
V I2 o 1 o_ 7 N . 2
C i ; . n i e n c i r ol e C aga n e , i nS ax 10 4. hn hn 2 E gn r Mahn yC lg , h n ' U / r a e i g e e n , s X ' hn i 0 6 C i v a 7 a)
Abta tA f esc o ・n o ce u pt c ’ a nsp ot ytm a ersac bet s c : v - t na nc nrt p m u k l pr ss s h eerhojc, r i ei e r S T u e t
Ba e n Ri i Flx b e Co lng M o l s d o g d e i l up i de
YA NG i g , ANG Ru , HAO Yu h n L P n — n Pn W i S — o g , V e g mi
( I ca i l n ier gDp r et Fj nTa i C lg oai n ehooy uhuFj n3 0 0 , 1Meh n a gne n eat n , u a r c oeeo Vct nad Tcnl ,F zo u a 50 7 c E i m i f l f o g i
混凝土泵车布料臂架系统多体动力学仿真

混凝土泵车布料臂架系统多体动力学仿真
苏小平;殷晨波;王东方;姜涛;徐诚
【期刊名称】《中国工程机械学报》
【年(卷),期】2004(002)002
【摘要】运用多体动力学理论和方法,建立一种混凝土泵车布料臂架系统动力学仿真模型,应用仿真模型对布料臂架系统进行了仿真研究,得出了该臂架系统各组成构件之间铰点的作用力变化规律,为布料臂架系统组成构件的结构参数设计提出了依据,尤其是为臂架系统连接件的应力应变疲劳寿命的评估分析以及关键结构件的最优化设计给出基本数据,这一研究为开发布料臂架系统虚拟样机打下基础.
【总页数】4页(P167-170)
【作者】苏小平;殷晨波;王东方;姜涛;徐诚
【作者单位】南京工业大学,车辆与工程机械研究所,南京,210009;南京理工大学,机械工程学院,南京,210094;南京工业大学,车辆与工程机械研究所,南京,210009;南京工业大学,车辆与工程机械研究所,南京,210009;南京工业大学,车辆与工程机械研究所,南京,210009;南京理工大学,机械工程学院,南京,210094
【正文语种】中文
【中图分类】TU646
【相关文献】
1.混凝土泵车布料臂架系统的仿真及参数化设计 [J], 吴瀚晖;宁介雄
2.基于刚柔耦合模型的混凝土泵车臂架系统动力学仿真 [J], 杨平;王瑞;绍雨虹;吕
彭民
3.混凝土泵车臂架系统常见故障诊断及维修管理 [J], 沈春霞
4.基于威布尔分布的混凝土泵车臂架系统的剩余寿命评估 [J], 荣涛; 蒙帮粱
5.某型混凝土泵车臂架系统的平顺性分析 [J], 卞青青;马雪洁;柳英杰;苏江
因版权原因,仅展示原文概要,查看原文内容请购买。
泵车臂架刚柔耦合模型仿真

泵车臂架刚柔耦合模型仿真《机械工程与自动化杂志》2014年第二期1柔性体理论及创建方法多柔性体系统动力学是研究由可变形物体以及刚体所组成的系统在经历大范围空间运动时的动力学行为[3]。
它在多刚体动力学理论基础上,不仅考虑了各部件连接点处的阻尼与弹性等的影响,又进一步考虑到部件的变形,极大地提高了多体系统仿真的准确性。
1.1柔性体运动学方程在多柔性体系统动力学分析中,系统能量是一个非常重要的物理量。
同时,在理论计算过程中,能量的时间历程能否遵循保守系统能量守恒的原理保持常数,是考核计算结果正确与否的一个重要的指标。
柔性体的动能可表示为。
运用拉格朗日乘子法建立的多柔性体运动微分方程为:其中:K,M,D分别为模态刚度矩阵、质量矩阵和阻尼矩阵;Dξ•,Kξ分别为物体内部由于阻尼和弹性变形而引起的广义力;ψ为全局坐标基相对于局部坐标基的角度;λ为有约束的拉格朗日乘子;Q为外力作用下的广义力;fg为广义重力。
1.2柔性体创建方法使用ADAMS软件创建柔性体有3种方法[5]:①利用ADAMS中柔性梁的方法,即将模型中的某一个构件离散成许多段刚性单元,经过离散化的构件之间采用柔性梁的方式连接,然后为每一段离散件赋予不同的材料、颜色等属性,指定柔性梁的参数,但这种方法仅限于外形简单的构件时才能够使用,而且离散连接的实质并不是建立了真正意义上的柔性体,只是刚性体与刚性体的柔性连接;②利用ADAMS中的AutoFlex模块,在View模式下直接建立柔性体的模态中性文件,然后再利用该文件创建的柔性体代替原有刚性体实现柔性化处理,但自ADAMS软件07版本以后,软件已淡化了本身制作柔性体的功能;③先将刚性体模型导入到有限元软件中,将其离散成细小的网格后,计算有限元模型的模态,最后将计算结果保存为MNF 文件导入到ADAMS中建立柔性体。
通过计算构件的固有频率和对应的模态,按照模态理论,本文采用第3种方法建立柔性臂架,建立臂架系统刚柔耦合模型的流程见图1。
泵车臂架虚拟样机仿真与压损优化
泵车臂架虚拟样机仿真与压损优化
王琛;丁海港;石峰;赵延斌;王福鑫;庞智珍
【期刊名称】《机床与液压》
【年(卷),期】2024(52)3
【摘要】臂架液压系统是混凝土泵车的重要组成部分,用于输送混凝土和布料,目前存在压损过大的问题。
借助AMESim与Simcenter 3D Montion软件建立62 m
泵车臂架虚拟样机模型,经实验验证该虚拟样机与实际系统具有90%以上的契合度。
利用臂架虚拟样机研究系统的动态特性,揭示系统的压力分布,分析系统压损过高的
原因,可知主要压力损失集中在平衡阀与长液压管路,提出3种降低压损的方案。
以臂架管路通径优化为例,进行仿真分析与优化,并通过实验验证了管路通径优化效果。
由仿真和实验结果可知:五臂倒钩收回工况下,将臂架长管路通径由8 mm增大至
10 mm,可使小腔侧管路压力损失降低50%,大腔侧管路压力损失降低60%,可有效降低系统压力。
【总页数】6页(P143-148)
【作者】王琛;丁海港;石峰;赵延斌;王福鑫;庞智珍
【作者单位】中国矿业大学机电工程学院;江苏省矿山智能采掘装备协同创新中心(省部共建);徐州徐工施维英机械有限公司
【正文语种】中文
【中图分类】TH137
【相关文献】
1.基于虚拟样机技术的混凝土泵车臂架疲劳仿真分析
2.混凝土泵车臂架系统优化及仿真
3.基于虚拟样机技术的混凝土泵车臂架的伸展油缸仿真研究
4.基于虚拟样机技术的混凝土泵车臂架的仿真研究
5.基于ADAMS/VIEW的混凝土泵车臂架变幅机构的仿真及优化设计
因版权原因,仅展示原文概要,查看原文内容请购买。
机械手臂运动学分析与动态模拟仿真研究
机械手臂运动学分析与动态模拟仿真研究机械手臂作为一种重要的工业自动化设备,广泛应用于生产线自动化、危险环境操作等场景。
而机械手臂的运动学分析和动态模拟仿真则成为提高其操作精度和准确性的关键环节。
本文将介绍机械手臂的运动学分析和动态模拟仿真,并探讨其在工业领域的应用。
首先,机械手臂的运动学分析是研究机械手臂在空间中的位置、速度和加速度等运动学参数的科学。
通过运动学分析可以获得机械手臂的关节变量与末端执行器姿态之间的关系,从而掌握机械手臂的运动规律。
在运动学分析中,通常采用基于Denavit-Hartenberg(D-H)坐标系的方法,通过建立坐标系和连接关节的转动矩阵,计算机械手臂各关节的位姿和运动学参数。
运动学分析的结果可以为后续的轨迹规划、动力学分析提供基础。
其次,机械手臂的动态模拟仿真是通过数学建模和仿真技术,模拟机械手臂在工作过程中的运动状态和力学行为。
动态模拟仿真可以帮助优化机械手臂的设计和控制策略,预测机械手臂在不同工作负荷下的性能,并评估其工作空间、作业速度等参数。
在动态模拟仿真中,需要考虑机械手臂的惯性、摩擦、关节驱动力矩等因素,通过建立动力学方程和数值模型,求解机械手臂的运动状态和关节力矩。
动态模拟仿真可以准确反映机械手臂的动态性能,为实际操作提供指导和参考。
机械手臂的运动学分析和动态模拟仿真在工业领域具有广泛的应用价值。
首先,运动学分析可以为机械手臂的轨迹规划和路径规划提供基础,根据末端执行器所需的姿态和位置,计算关节角度,使机械手臂能够按照要求进行准确的操作。
其次,动态模拟仿真可以辅助机械手臂的设计和改进。
通过模拟机械手臂在不同负荷下的工作状态,评估机械结构的稳定性和承载能力,为机械手臂的优化设计提供参考。
此外,动态模拟仿真还可以对机械手臂的控制策略进行验证和优化,提高机械手臂的运动精度和响应速度。
总之,机械手臂的运动学分析和动态模拟仿真是研究机械手臂运动规律和性能的重要手段。
混凝土泵车总体设计及布料系统仿真方法的研究简介-6页word资料
混凝土泵车总体设计及布料系统仿真方法的研究简介混凝土泵车行业的蓬勃发展迫使国内各大泵车企业开发、研制符合国内工程要求的,具有自己专利的产品,然而混凝土泵车结构复杂,如今还没有一套完整、全面的总体设计方法应用于混凝土泵车设计中,本文正是基于此目的,在总结归纳了国内外各种混凝土泵车各种典型结构的基础上完成了混凝土泵车总体设计,主要包括:① 泵车的总体结构分析;② 泵车的布料装置的选择;③ 泵车的主要技术参数计算;④ 泵车底盘的选择、泵车各工作装置的驱动功率、发动机功率的选择等:⑤ 泵车的稳定性分析,即部件重心的计算、泵车行驶时的稳定性计算等。
混凝土泵送的新技术,新设备和新型材料不断涌现,可以说这成为了混凝土泵车总体设计中必不可少的一部分,这些产品不同程度的代表了混凝土泵送设备未来发展的趋势,也成为设计,制造人员在设计混凝土泵车时必须考虑的问题。
本文就泵车的典型结构和系统以及其他类的混凝土施工设备进行了研究和分析,以期望为混凝土泵车的设计开发人员提供一定的参考。
仿真技术是近年来发展起来的一种计算机辅助设计方法。
将计算机动画仿真应用于工程实际,将会使设计和分析工作变成直观、实际的过程。
第 3 页本文给出了混凝土泵车布料机构计算机仿真方法,主要包括三方面的工作:① 泵车布料机构的运动仿真;② 布料机构包络图仿真;③ 混凝土泵车性能曲线仿真。
布料机构计算机仿真通过简化的模型的运动,来模拟机械部件的动作,能直观地显示机构运动是否发生干涉,结构的尺寸设计是否合理。
然后将信息反馈回来,修改设计方案,再仿真,直到结构设计合理。
性能仿真可预测机械的工作性能,事先进行修正,直到达到最优。
另一方面,虚拟现实(VirtualReality)技术的兴起为人机交互界面的发展开创了新的研究领域: 为各类工程的大规模的数据可视化提供了新的描述方法。
木文试图将虚拟现实技术应用于混凝土泵车的设计中,以期提高该产品的设计水平,缩短开发周期,降低生产成本。
基于虚拟样机技术的混凝土泵车臂架的伸展油缸仿真研究
Ke r s Ar ; n r t u y wo d : m Co c e ep mp; ADAM S; i l t n S mu a i o
中图分类 号 : H1 , U 4 文献标 识码 : T 6 T 62 A
1 引言
混凝土泵车是现代建筑业 中普遍使用的建筑机械 , 它是将混
其导入 A A D MS中, A A S中建立液压油缸运动速度函数并进行仿真模拟, 在 DM 得到臂架转角曲线 , 液 压油缸 行程 曲线和液 压 油缸 作 用力一 时 间历程 图 , 过分析 , 出 了油缸振 动的 原 因, 通 找 并提 出了减 小振 动的方法, 仿真结果对混凝土泵车臂架系统设计有一定的指导意义。 关键词: 臂架; 混凝土泵车; D MS 仿真 AA ; 【 btat h T s m ioeo em s ip r n p r ecnr e u p w i t it A s c】Te ̄ s t n t otm o at a s ft oc t p m ,h hs b i r f ye s m fh t to h e c al y
机 械 设 计 与 制 造
8 2
文章编号 :0 1 39 (0 2 0 — 0 2 0 10 — 9 7 2 1 )3 0 8 — 2 Ma h n r De in c iey sg & Ma u a t r n f cu e
第 3期 21 0 2年 3月
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
混凝土泵车臂架D-H矩阵分析与仿真
摘要:本文根据机器人学基本理论,在忽略混凝土泵车臂架基本外形的前提下,对臂架系统进行杆件简化,建立了混凝土泵车臂架系统的D-H矩阵模型,并完成了混凝土泵车臂架系统的运动学分析,为开展智能混凝土泵车的研究奠定了理论基础。
关键词:混凝土泵车臂架运动学
混凝土泵车作为混凝土机械,在公路、桥梁、铁路建设、水利等国家基础建设以及房地产建设等方面,具有重要作用,可以有效地提高生产效率、降低作业人员劳动强度、提高混凝土浇筑质量,其主要作用是将混凝土从地面输送到高空或远距离场所实现混凝土浇筑。
目前,三一重工已经成为混凝土泵车的国内第一品牌,其产品涵盖25~72m 等多种型号,并且推出了智能泵车,可以实现按设定轨迹,实现混凝土智能浇筑。
在结构形式上,混凝土泵车属于典型的串联机器人结构,为了实现泵车的智能浇筑,对泵车臂架系统进行运动学求解分析是基本前提,在本文的研究中,主要对混凝土泵车的臂架系统进行了运动学分析。
1 模型简化与D-H矩阵
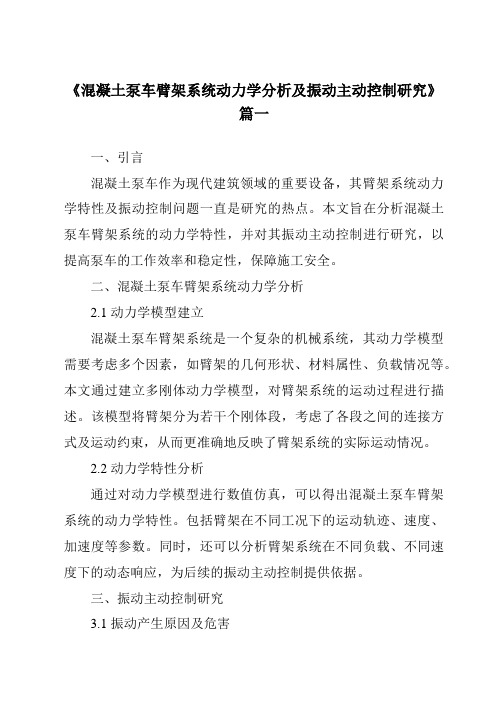
图1所示为三一重工某型号混凝土泵车产品照片及臂架系统杆件简化模型。
其运动包括底部转台的转动关节,可以驱动臂架实现360°范围内的作业;臂架与臂架之间转动关节,可以在一定角度范围内
旋转。
根据关节机器人学基本原理,将臂架系统简化成图1(b)的模型,为了便于建立D-H矩阵进行运动学分析,将驱动臂架1的转动关节利用坐标平移原理移动到底部转台坐标点,然后以每个驱动关节旋转点建立相应的坐标系,分别标记为(X0,Y0,Z0)、(X1,Y1,Z1)……(X4,Y4,Z4)。
根据简化模型及D-H矩阵基本原理,结合每节臂架的几何尺寸,可以得到如表1所示的D-H矩阵几何参数表。
表1中,θi表示关节n的转角;表示两相邻的z轴之间的角度(即关节扭转);表示在z轴上两条相邻公垂线之间的距离,表示坐标系相对上一坐标系的偏移量(即关节偏移)。
2 机械手臂架的坐标齐次变换
使用坐标变换的方法可以从其中一个坐标系转换到另一个坐标系的位置和姿态。
为此按照下列顺序将臂架的坐标系转换到另一个臂架的坐标系上。
针对泵车末端臂架,相对于转台坐标的系的坐标变换可以根据基本坐标变换原理描述如下:
将各节臂架的坐标变换矩阵代入式(2)中,就可得到机械手末端的执行机构的空间位姿矩阵:
3 运动学分析
基于泵车臂架系统的杆件简化模型以及D-H矩阵集参数,并利用ADAMS软件建立了臂架系统的运动学仿真模型(如图2所示),在图2中,转台简化成旋转关节,运动范围为360°,其他各臂架关节的转动角度根据混凝土泵车实际作业时的安全角度,通过软件设定。
末端臂架位置随时间变化的曲线和臂架各关节角度随时间变化的曲线分别如图4、图5所示。
4 结语
本文利用机器人学基本理论,在对混凝土泵车臂架系统进行杆件简化的基础上,建立D-H矩阵,并完成了泵车末端臂架的D-H矩阵位姿分析,并利用建立了混凝土泵车臂架的ADAMS简化模型,并完成了运
动学仿真分析,为智能泵车的研究奠定了理论基础。
参考文献
[1]谢存禧.机器人技术及应用[M].机械工业出版社,2001.
[2]蔡自兴.机器人学[M].清华大学出版社,2002.。