基于PC_104计算机的数据采集系统设计与实现
基于PC104的电动投弹器检测系统电路设计与实现

端 口完 成 ,信 号 显 示 系 统 将 显 示 的 信 息 输 入 到 液 晶 控 制 器 ,
由液 晶 控 制 器 实 现 显 示 的控 制 。 。
1 检 测 系统 电 路 的 功 能
P /0 C 1 4在 国际 上 十分 流行 。被 I E E E协 会 定 义 为 I E — E E P 9 .。I E — 9 6是 P 9 61 E E P 9 C和 P / T工 业 总 线 规 范 , 一 种 优 CA 是 化 的 、 型 堆 栈 式 结 构 的嵌 入 式 控 制 系 统 , 应 于 携 便 的 测 小 适
p i cp ea d s o n sme h d wi o f mig t es e i cp a t a r g a r i l n h wi gi to , t c n i n p c f r ci l o r m,c mp e et ef n t n f h i u t e in; n t h r h i c p o lt u c o so ecr i d s h i t c g
Usn p c a t r c h p c mb n d w t L t o e l e t e b si tra eP g e me t n el gc c n rl i gs e i i e a e c i o i e i CP D meh d t r a i u ne c C 1 a r e n ,a d t o i o t l n f h o z h f 4 0 h o
crut ic i;Dee t nsse i ea ta s rc s ic ic nsa l r ,me t gted s nrq i me t d x tci ytm t cu t t o escrut a tbewok o nh l e p ei ei ur n h g e e ns n e . i
基于PC-104的便携式定位定向装置设计及实现

W U e p ngFan H o30 2 6 0 6 u i。 m i8 0 0 ) Ur
Ab t c : t t e d v l me t o I , o io ig a d di ci n l sr t a Wi h h e eop n f T p st n n n r t a i e o d v c r s d mo e wi e y o t e to p s a pl mo or n a d e ies a e u e r d l n h r o h y r t me t n b c me t e e e s o s t d alwi e e o h n c s ar t ol o e t y h me ge c . t t e i h r n y Wi h h hg s n ivt e s r . a n o t r p dy p st i g a d pr cs l e st i s n o s we c n bi g u a i l o ionn n e i ey i y r i
iP S中断 I G L
…
; 服务程序 :
dr t n g d v e t r ie ae ur o h ro vn .h i ci i e i o po d sfg ad frte t p mo i T i e on c v o g s
基于PC104总线高精度数据采集板卡硬件的设计

基于PC104总线高精度数据采集板卡硬件的设计高建中;史万莉【期刊名称】《信息通信》【年(卷),期】2014(000)004【摘要】基于PC104总线,采用先进的现场可编程门阵列(FPGA)[1]器件制作的数据采集板卡,实现数据的高速采集。
经试验测试表明,该数据采集板卡具有高速数据采集,此外PC104总线接口具有良好的数据传输能力,能满足高速信号传输的要求。
%This paper based on PC104 bus, uses the advanced field programmable gate array (FPGA) devices to make the data acquisition board in order to realize the high speed of data acquisition. The test shows that the data acquisition card has a high speed data acquisition. In addition, PC104 bus interface has a good ability of data transmission, can satisfy the requirement of high speed signal transmission.【总页数】3页(P61-62,63)【作者】高建中;史万莉【作者单位】中国船舶重工集团公司第七一○研究所,湖北宜昌443003;中国船舶重工集团公司第七一○研究所,湖北宜昌443003【正文语种】中文【中图分类】V271.4【相关文献】1.基于PC104总线数据采集卡的设计 [J], 刘小飞;杨丰萍2.用CPLD实现的PC104总线标准多通道同步数据采集板卡 [J], 余芳;王文志3.基于PC104总线的双通道CAN通讯板卡设计 [J], 郭晓军4.基于Simulink/S-Function模块的数据采集板卡硬件驱动开发 [J], 瞿婷婷;周静;卫佳骏;吴清;谢新勤;曹波;夏春明5.基于PCI数据采集板卡的高精度传感器检测系统 [J], 乔爱民;程荣龙;张燕;吴鸿;胡伟全因版权原因,仅展示原文概要,查看原文内容请购买。
基于PC/104接口的ACM程控测试系统设计
点:
1测 量 点为 l . 5路 混合 信 号 ,即
鬈
既有 l 4路 模 拟信 号 ,又有 1 数 字 路 信号 ; 2模 拟 信号 既 有慢 变 化 的温 度 、 .
襄
20. 0 66电 子 设 计 堑 用 wwwe wc m.n . .o c a
驱 动 ,输 出驱 动 电平 为 33 .V,所 以
P /0 总 线读 写控 制 信 号 可 直 接 输 C 14 入 F GA而 省 去 电平 转 换 芯 片 ;对 P 于 需 要 电平 转换 的双 向数 据 线 ,可 用 7 HC2 5三 态 隔 离芯 片 ,通 过控 4 4
制 7 HC2 5的 OE 和 DI 引 脚 来 实 4 4 R
现 数 据 传 输 及 驱 动 电平 转 换 ; F GA控 制 完 成 一 次采 集 后 ,向嵌 P 入 式 计 算 机 发 送 的 中 断 信 号 通 过 T S 13 P 6 0 2升压 DC— DC芯 片 连接 到 P /0 总 线 I C14 NT引脚 ,该芯 片 可 实 现 33 .V到 5 电平 转 换 。 V 系 统 关键 电路 设 计 为 了协 调 A/ D采 集 、D A控 制 / 来 实现 不 同环 境 参 数 的 模 拟 ,控 制 相对误差须在 l 左右 ; % 5 被 控 对 象 以及 待 测 试 对 象 离 .
式 计 算 机读 取 数 据 ,并 由 F GA通 P
由 于 本 系 统 对 实 时 性 要 求 较 过 查 询 主控 室计 算 机 发 送 给 嵌入 式
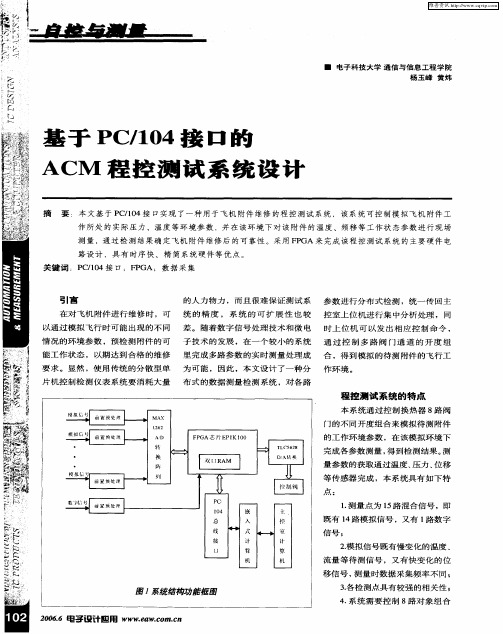
ACM 程 控 测试 系 统设 计
嵌 入式 计 算机 SBC— 6 C2
与 P /0 C 1 4总 线 传输 速 度 ,保证 数 据 传 输 的 可靠 性 ,采 用 缓 冲 存 储 电路
基于PC104的GPS数据接收的软件实现
P C 1 0 4是嵌入式 P C的一种机械 电气标准, 为嵌入式应用 提供了标准 的系统平台, 为设计应用系统的工程师提供 了功能 强大、 可靠性高 、 接 口标准 、 使用方便 的系统组件 。 G P S在移动 目标的 自动导航和控制 中都有所应用 。本文 阐述利用 P C 1 0 4 平 台采 集 G P S数据 , 获取移 动 目标 的位置信息 的实现方法。 通 常情况下 P C1 0 4的软件设计开发环境是基于 DO S操 作系统的, 利用 C语言进行 软件 编程 来实现。 随着主 C P U板、 C F存储卡等性 能的大幅提高 , 根据数据处理对硬件 的要求不 同, 可 以选 择 W I N 2 0 0 0系 统 代 替 一 直 习 惯 用 的 DO S系 统 , 从 而 利用 C # . N E T开发环境下 C # 语言编程实现 , 降低开发难度 , 拓 宽实现路径 。而且大部分参考文献和 网络文章都采用从 串 口一次性读 入NME A 0 1 8 3 数据 , 每一条 N ME A 0 1 8 3 语句都 是 以“ ¥ ” 开始 的, 在处理缓存数据时一般是通过搜寻 A S C H码 ” ¥ ’ t
2 G P S数 据采集
采集 GP S数据地理信息完成定位信息 的获取,实现位置 实 时和事后的精确告知。 通过 G P S接收机接收 G P S原始数据 信 息, 对原始数据进行 处理后存储并转发。 GP S定位信息接 收 系统主要 由 G P S接 收天线 、 变频器 、 信 号通道 、 微处理器 、 存储 器 以及 电源等部分组成 。 利用 R S 一 2 3 2串口将地理位置信 息和 速度信息等从 GP S 接收机传送到 P C 1 0 4计算机 中进行信 息提 取处理 , 再利用 RS 一 4 2 2串口传送至接收设备 的 R S . 4 2 2 端 口。 对G P S 进行信息提取必须首先 明确其帧结构 , 然后才能根 据其结构完成对各定位信息的提取。本文使用 的 G P S接收机 采用 N ME A 0 1 8 3 通信协议, 此协议是为了在不同的G P S 导航设 备 中建立统一的 R T C M 标准( G P S差分协议) 。 N ME A 0 1 8 3 语句 以A S C I I 格式输 出, 传输速率可 自定义, 缺省波特率为 4 . 8 k b p s 。 下面 以采 集 G P S 数据 中经度 和纬 度为例 阐述 说 明对 N ME A0 1 8 3数据 的读取和处理方式 : 2 . 1数 据提 取 的实 现 GP S 接收机作为数据终端设备利用接 口与 P C 1 0 4计算机 通讯 串 口相连 。 通过对通讯 串 口的编程可 实现 GP S信号 的接 收 。GP S 信 号有 二进 制 和 AS C I I两种 。本文 用 后一 种 即 N ME A0 1 8 3格式 。 NME A0 1 8 3 格式 以“ ¥ ” 开始 , 以“ \n ” 结束 , 对 于本 文所 使用 的 G AR MI N1 5 G P S接 收机板 ,其 发送到 P C1 0 4计算机 的数据主要 由帧头 、 帧尾和帧 内数据组成, 根据
基于PC104总线的实时信号采集处理系统
基于PC104总线的实时信号采集处理系统作者:付霖宇程永茂张鑫刘华芹来源:《现代电子技术》2013年第10期摘要:为了满足外场装备检测装置的便携化和信号采集的实时化要求,基于PC104总线的高效数据传输特点,采用了上位机控制板和信号采集板相结合的嵌入式系统搭建方法,在信号采集板中通过FPGA控制逻辑实现了多通道开关、信号调理电路和A/D转换器的配置,并把采集的信号数据传输给上位机控制板进行实时显示。
应用结果表明,该实时信号采集处理系统操作简单,具有较高的实时性和稳定性。
关键词: PC104; FPGA;数据采集;嵌入式系统;逻辑控制中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)10⁃0150⁃030 引言PC104是嵌入式工控机的一种,其外部总线接口为PC104总线。
使用堆叠的方式可以将多个PC104主板结合到一起,并通过螺栓固定,保证系统的牢固可靠,应对恶劣的使用环境。
由于PC104具有功耗低,体积小,扩展性高,功能强大等优点,其已经在航空航天、军用武器装备、工业控制等领域得到了广泛的使用[1⁃2]。
在对武器装备进行测试维护时,经常需要对设备中的各类模拟信号进行分析,从而对武器系统的运行情况做出判断。
目前常见的测试设备往往实时性不高,无法更多地进行人机交互。
同时由于测试设备体积过于庞大,并不方便在外场对武器装备进行直接的测试和维护。
随着现阶段军用装备外场测试的信息化程度逐渐提高,迫切需要研制出体积小、结构紧凑的便携式实时测试设备[3]。
目前主流的实时信号采集方式是通过高速A/D转换器件来完成的,其优点是信号精度高,实时的信号采集带来了大量的数据需要处理,对后端的信号处理系统提出了较高的要求。
因此本文搭建了基于PC104总线的实时信号采集处理系统,凭借FPGA的高速处理能力控制A/D转换器完成数据的采集,并通过PC104总线将数据提供给上位机完成用户对实时信号的监测。
数据采集系统设计与实现
数据采集系统设计与实现一:实验目的1.理解ADC0809工作环境;2.运用状态机设计ADC0809采样控制器。
二:实验原理ADC0809是CMOS的8位A/D转换器,片内有8路模拟开关,可以控制8个模拟量中的一个进入转换器中,转换时间约100us,含锁存控制的8路多路开关,输出由三态缓冲器控制,单5V电源供电。
用状态机对ADC0809进行采样控制,将采得的数据存入RAM,整个采样周期需要4~5个状态即可完成,当采样结束后通过LOCK向锁存器件进程发出锁存信号,将由ADC0809的D数据输出口输出的8位转换数据锁存起来,以便外部电路能从Q端读到稳定正确的数据。
三:实验步骤1.程序的编辑LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY ADCINT ISPORT (D:IN STD_LOGIC_VECTOR(7 DOWNTO 0);CLK: IN STD_LOGIC;EOC: IN STD_LOGIC;ALE: OUT STD_LOGIC;START: OUT STD_LOGIC;OE: OUT STD_LOGIC;ADDA: OUT STD_LOGIC;LOCK0: OUT STD_LOGIC;Q: OUT STD_LOGIC_VECTOR(7 DOWNTO 0));END ENTITY ADCINT;ARCHITECTURE BEHAV OF ADCINT ISTYPE states IS(st0,st1,st2,st3,st4);SIGNAL current_state,next_state:states:=st0;SIGNAL REGL : STD_LOGIC_VECTOR(7 DOWNTO 0);SIGNAL LOCK : STD_LOGIC;BEGINADDA<='1’;Q<=REGL;LOCK0<=LOCK;COM: PROCESS(current_state,EOC)BEGINCASE current_state ISwhen st0=>ale<='0';start<='0';lock<='0';oe<='0';next_state<=st1;when st1=>ale<='1';start<='1';lock<='0';oe<='0';next_state<=st2;when st2=>ale<='0';start<='0';lock<='0';oe<='0';if(eoc='1') then next_state<=st3;else next_state<=st2;end if;when st3=>ale<='0';start<='0';lock<='0';oe<='1';next_state<=st4;when st4=>ale<='0';start<='0';lock<='1';oe<='1';next_state<=st0;when OTHERS=>next_state<=st0;END CASE;END PROCESS COM;REG:PROCESS(CLK)BEGINif clk'event and clk='1' then current_state<=next_state;end if;END PROCESS REG;LATCH1:PROCESS(LOCK)BEGINif lock='1' and lock'event then regl<=d;END IF;END PROCESS LATCH1;END BEHAV;程序的仿真波形为:2.将实验箱左下脚的拨码开关4,6,7拨向下,其余全部向上,最上部的拨码开关也全部拨向上。
嵌入式Linux的PC104数据采集卡的驱动设计
1 概述
嵌入式 Ln x系统是一个分布式 、多用户、多任务 的操 iu
作系统 ,被广泛应 用于通信系统、航空航 天仪器 、工业控制 等方面 。但在 很多总线 的外 围设备都不具备嵌 入式 Ln x下 iu
的驱动程序 。若要使用 ,就需 自行开发驱 动程序 。在嵌入式
Ln x系统下 ,通过文件系统来屏蔽硬件设备特性 ,把具体 iu
D MM一6A 1一T数据采集卡是遵循 P 0 C14总线结构而设计
图1 D MM- . T结构 1・ 6A
中 分 号: P15 圈 类 T 3 . L2
嵌 入 式 L n x的 P 0 iu C1 4数据 采 集 卡 的驱 动 设 计
朱 斌 ,程明臂
( 南京工业大学 自动化学 院,南京 2 0) 109 0 摘 要 : P 14 在 C 0 模块硬件平 台和嵌 入式 Lnx系统下 , i u 设计并实现 P 14总线结构数据采集卡 D C0 MM一 一 1A 6 T的序 就可 以通过标准 的文件操作 实现对设备的访问…。
本文 以 D a n yt 公司开发的 P 14总线结构的 imo dS s ms e C0
数据采集卡 D MM一6A 1 一T为硬件外设 ,在 自行裁减和移植的 嵌入 式 Ln x平台支持 下,阐述驱动程序的结构设计和开发 iu
h a l r be nid sr l rm tg a hb tesm pigp o lm so n u t a h o ao r p yDM M 6 AT i mbe d dLiu n ion e t n i c 1 - ne d e n xe vr m n .
[ yw r s mb d e n x P 0 ; r e ein d t aq it nadpoesn Ke o d l e e ddLiu ; C14 d vr s ; aa c usi rcsig i d g io n
数据采集系统的设计与实现
数据采集系统的设计与实现(总19页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--长江大学工程技术学院课程设计报告课设题目数据采集系统的设计与实现课程名称汇编语言+微型计算机技术系部信息系班级学生姓名学号序号指导教师时间2012年8月28日~2012年9月9日目录目录长江大学工程技术学院 .......................................... 错误!未定义书签。
一、设计目的 .......................................................... 错误!未定义书签。
二、设计内容 .......................................................... 错误!未定义书签。
三、硬件设计及分析............................................... 错误!未定义书签。
1.总体结构图.................................................. 错误!未定义书签。
2.各部件端口地址设计及分析 ......................... 错误!未定义书签。
3.各部件的组成及工作原理 ............................. 错误!未定义书签。
四、软件设计及分析............................................... 错误!未定义书签。
1.总体流程图.................................................. 错误!未定义书签。
2.主要程序编写及分析..................................... 错误!未定义书签。
五、系统调试 .......................................................... 错误!未定义书签。
基于PC/104的多CAN-Bus系统设计
( sac Ree rh& Dein C ne ’ Ral y Sg aln a tr, ’ 7 0 4 ,C ia s e tr Xi吼 g i wa in l gF coy Xi吼 1 0 8 hn ) i
Ab t a t I i p p r ou in wh c sP / 0 s ap a o m n AN— sf rc mmu i a in i e in d S h o - s r c :n t s a e , s l t i h i C 1 a l t r a d C h a o 4 f Bu o o n c t sd sg e . o t e p w o
生 命 期 ; 以其 优 良 的 品质 、 可 靠 性 及 模 块 化 . 泛 应 用 于 它 高 广
E M7 2 P 18作 为 逻 辑 控 制 和 译 码 单 元 。整 个 系统 共 设 计 4个 C N 口 , 中 两 个 用 于 外 部 远 距 离 通 讯 , 作 在 5K / 下 , A 接 其 工 bs 另 外 两 个 用 于 近 距 离 通 讯 ,工 作 在 lMbs , 当然 这 4个 /下 C N 口的硬件是完 全相同 的。另外 。 统还扩展 了一个 5 A 接 系
工业控 制 、 空航 天 、 事 、 疗 、 防设备 、 能仪器 仪表 、 航 军 医 消 智
导航 、 讯 、 控 、 通 数 自动 化 生 产 设 备 、 携 式 计 算 机 等 领 域 。 便
在 实 际 应 用 中 , 个 较 为 复 杂 的 系 统 , 往 不 是 由单 个 一 往 计 算 机 独 立 控 制 。 是 由多 个 计 算 机 组 成 通 信 网络 共 同 完 成 而
CAN it r c h p c n r l s g C L a d t ewh l y t m r ga a e p o ie . n ef e c i o to i P D o e s se p a u n n h o m r r v d d