数控机床机械手机械结构设计
数控机床机械手机械结构设计
发表时间:2019-05-23T11:16:06.807Z 来源:《防护工程》2019年第1期作者:徐特[导读] 机械手借鉴了人的手臂,通过结构的固定、编程,使其可以实现抓取、摆动,在工业化生产制造过程中被广泛应用。
重庆川仪速达机电有限公司重庆北碚 400700 摘要:机械手作为机械结构的重要组成部分,其在数控机床中发挥着巨大的作用,是数控机床的重要组成部分。基于对数控机床机械结构设计分析,其对于机械手控制精度具有重大影响,是提高整体协调性的重要组成部分。本文基于数控机床机械手的机械结构分析,阐述了各结构的主要功能,并对各结构进行了全面论述,旨在为相关设计人员提供经验借鉴,保障数控机床机械手机械结构的稳定性。
关键词:数控机床;机械手;机械结构;结构设计;
1数控机床机械手概述机械手借鉴了人的手臂,通过结构的固定、编程,使其可以实现抓取、摆动,在工业化生产制造过程中被广泛应用。机械手基于结构的衔接而运行,并基于系统的控制而实现具体作业,最早的机械手结构设计能够支撑一定强度的劳动,可以代替人工在生产线作业中的地位。基于自动化技术的发展,将系统与自动化系统进行有效结合,其结构精度、结构稳定性均得到了有效的提高,可实现对机械手结构的科学控制。
2数控机床机械手结构设计分析
2.1下料手爪结构设计
下料手爪结构,主要是用以工件装卸,根据适配的机床参数以及工作方式的不同,下料手爪结构发挥的作用也有所不同。有搬运、加工、测算三种功能,机械手爪结构其设计原则就是为了满足工作要求,要求整体结构尽可能地选用少连接部件,要求具有良好的适用性、通用性,可以适配多种机床环境。同时还要考虑机械手在运行过程中出现故障时,便于工作人员更换故障工件以及维修,设计上要考虑与智能计算机控制系统的兼容性。基于以上要求,机械手采用杠杆式的连接结构,以活塞推压实现各结构联动,采取这样的设计让机械手爪可以做出夹紧、放松的动作。
2.2下料手腕结构设计
对于手臂和手爪来说,下料手腕结构是实现两者连接的重要部分,也是机械手特定动作的最末端,应对手臂进行合理配合、对手抓进行有效控制,使特定工作得以最终完成。手腕是连接的部件,不但要求其符合工作的具体要求,还要遵循结构紧凑、体积领条等设计基本原则[1]。手腕活动自由度一般由实际机械手工作内容来决定。通常来讲,自由度数能够决定机械手手腕运动型和灵活性,若提高自由度数,那么便能提高手腕灵活性,可以选取的搬运行为变的更多,不过提高自由度会让腕部结构变得复杂化,制造成本、设计成本将大大增加。要想让机械臂在工作过程中传递不同力以及传递的连贯性得到保证,应让结构连接有一定的刚度和强度。要想增加运动时的精度,需要最大限度地将手腕不同关节连接复杂度降低,对构件所具有的刚度特性进行有效利用,设置结构运动的纤维,使机械手由于运动超限给工作人员带来的人身伤害与机械手给自身带来的损坏情况得到预防。经过分析、考察多种具体机床设计的机械手结构,使下料手腕结构工作的安全性和精确度得到保证,应按照结构紧凑、结构简单的设计基本原则,以作用要求得到满足为前提,对三个自由度进行设计,从而让下料手能够对不同工作的复杂需要进行满足[2]。
2.3机械传动结构设计
机械手传动结构设计,要关注机械手运行过程的精度和响应速度这两个因素,是机械手结构设计的难点之一。由于其有精度和速度的要求,因此机械手的体积不宜过大,要保持较低的重量,通过这样的设置保证较高的响应速度。但是为了操作的精确度,还要在有限的结构空间、重量方面,保证各零部件安装空间得到有效利用,以此满足高精度的操作要求。因此在设计上,要尽可能减少反向空回运动,以此提高运动、操作的精度。采用链传动的配合方式,对各连接结构进行优化,采用这样的设置可提高机械传动系统的使用寿命。
2.4机械手平衡结构设计
在关节式的下料手中,其平衡机构通常发挥着加快不同控制命令反应速度、减小驱动器负载等重要作用。在具体的生产过程中,应对弹簧式的平衡机构进行使用,该机构的优点主要有维修方便、拆卸轻松、成本低廉、结构简单、平衡性好等[3]。设计机械手最为重要的就是优化机械手平衡机构、连接机构、传动机构、主要构件等不同机构的设计,并对这些机构的配合方式、布局形式进行合理调整,实现系统运动的整体平衡,获得更好的平衡性,与此同时,弹簧式的平衡机构可以有效优化该平衡问题,使机械手的平衡要求得到满足[4]。
2.5关键部件结构设计
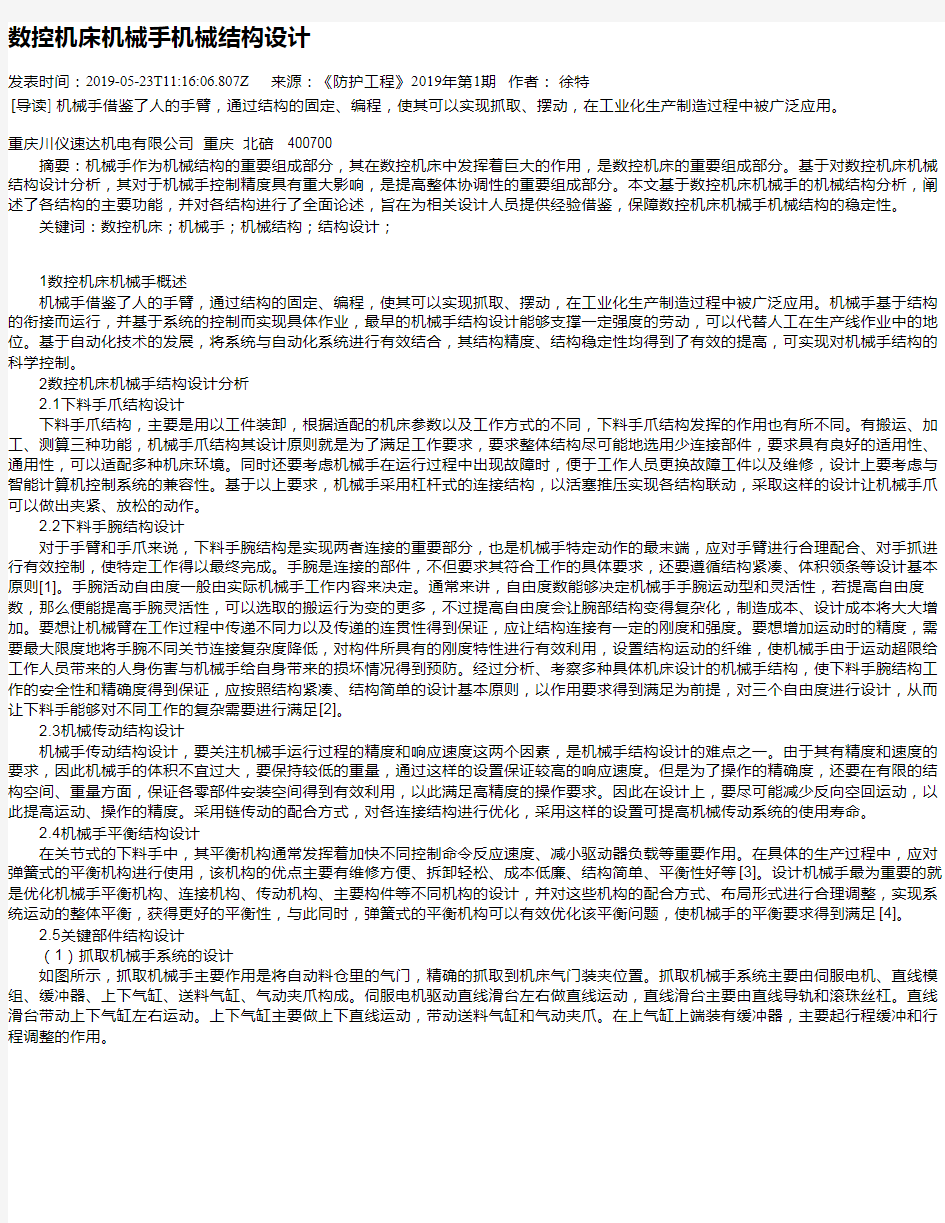
(1)抓取机械手系统的设计如图所示,抓取机械手主要作用是将自动料仓里的气门,精确的抓取到机床气门装夹位置。抓取机械手系统主要由伺服电机、直线模组、缓冲器、上下气缸、送料气缸、气动夹爪构成。伺服电机驱动直线滑台左右做直线运动,直线滑台主要由直线导轨和滚珠丝杠。直线滑台带动上下气缸左右运动。上下气缸主要做上下直线运动,带动送料气缸和气动夹爪。在上气缸上端装有缓冲器,主要起行程缓冲和行程调整的作用。
程控通用机械手的结构设计
目录 中文摘要 I Abstract ....................................................................................................................... II 1 绪论 (1) 1.1前言 (1) 1.2 工业机械手的简史 (1) 1.3工业机械手在生产中的应用 (3) 1.3.1 建造旋转零件(转轴、盘类、环类)自动线 (3) 1.3.2 在实现单机自动化方面 (3) 1.3.3 铸、锻、焊热处理等热加工方面 (4) 1.4 机械手的组成 (4) 1.4.1 执行机构 (4) 1.4.2 驱动机构 (5) 1.4.3 控制系统分类 (5) 1.5工业机械手的发展趋势 (5) 1.6 本文主要研究内容 (6) 1.7 本章小结 (6) 2 机械手的总体设计方案 (7) 2.1 机械手基本形式的选择 (7) 2.2机械手的主要部件及运动 (7) 2.3驱动机构的选择 (8) 2.4 机械手的技术参数列表 (8) 2.5 本章小结 (8) 3 机械手手部的设计计算 (10) 3.1 手部设计基本要求 (10) 3.2 典型的手部结构 (10) 3.3机械手手抓的设计计算 (10) 3.3.1选择手抓的类型及夹紧装置 (10) 3.3.2 手抓的力学分析 (11) 3.3.3 夹紧力及驱动力的计算 (12) 3.4 机械手手抓夹持精度的分析计算 (13) 3.5 本章小结 (16) 4 臂部的结构及有关计算 (17) 4.1 概述 (17) 4.2 手部直线运动机构 (17)
C6140卧式车床数控化改造设计
目录 1设计任务 (2) 2设计要求 (2) 2.1总体方案设计要求 (3) 2.2设计参数 (3) 2.3.其它要求 (5) 3进给伺服系统机械部分设计与计算 (5) 3.1进给系统机械结构改造设计 (5) 3.2进给伺服系统机械部分的计算与选型 (6) 3.2.1确定系统的脉冲当量 (6) 3.2.2纵向滚珠丝杠螺母副的型号选择与校核 (6) 3.2.3横向滚珠丝杠螺母副的型号选择与校核 (10) 4步进电动机的计算与选型 (13) 4.1步进电动机选用的基本原则 (13) 4.1.1步距角α (13) 4.1.2精度 (14) 4.1.3转矩 (14) 4.1.4启动频率 (14) 4.2步进电动机的选择 (14) 4.2.1 C6140纵向进给系统步进电机的确定 (14) 4.2.2 C6140横向进给系统步进电机的确定 (14) 5电动刀架的选择 (15) 6控制系统硬件电路设计 (15) 6.1控制系统的功能要求 (16) 6.2硬件电路的组成: (16) 6.3电路原理图 (16) 6.4主轴正反转与冷却泵启动梯形图.......................................... 错误!未定义书签。7总结 .. (18) 8参考文献 (18)
1设计任务 设计任务:将一台C6140卧式车床改造成经济型数控车床。 主要技术指标如下: 1) 床身最大加工直径460mm 2) 最大加工长度1150mm 3) X 方向(横向)的脉冲当量 mm/脉冲,Z 方向(纵向)脉冲 当量 mm/脉冲 4) X 方向最快移动速度v xmax =3100mm/min ,Z 方向为v zmax =6000mm/min 5) X 方向最快工进速度v xmaxf =370mm/min ,Z 方向为v zmaxf =730mm/min 6) X 方向定位精度±0.01mm ,Z 方向±0.02mm 7) 可以车削柱面、平面、锥面与球面等 8) 安装螺纹编码器,最大导程为25mm 9) 自动控制主轴的正转、反转与停止,并可以输注主轴有级变速与无极变 速信号 10) 自动控制冷却泵的起/停 11) 纵、横向安装限位开关 12) 数控系统可与PC 机串行通讯 13) 显示界面采用LED 数码管,编程采用相应数控代码 01.0=x δ02.0=z δ
第六章数控机床的机械结构答辩
第六章 数控机床的机械结构
提要本章讨论了数控机床机械结构的要求,介绍了提高机床刚度,减少机床的热变形,减少运动副的摩擦,提高传动精度,提高机床寿命和精度保持性的措施,介绍数控机床主运动系统和进给运动系统以及典型机械结构。学时:4学时 第六章数控机床的机械结构
目标了解数控机床的机械结构特点; 掌握提高机床刚度,减少机床的热变形,减 少运动副的摩擦的措施; 了解数控机床的主运动系统和进给运动系统以及典型机械结构及其工作原理 了解提高传动精度,提高机床寿命和精度保 持性的措施; 第六章数控机床的机械结构
建议 了解数控机床对机械结构的要求,掌握提高机床刚度,减少机床的热变形,减少运动副的摩擦,提高传动精度,提高机床寿命和精度保持性的措施,了解数控机床的主运动系统和进给运动系统以及典型机械结构。 第六章数控机床的机械结构
第一节概述数控机床的机械结构要求 1、高精度 2、高速度 3、高自动化要求数控机床必须具有很高的强度、刚度和抗振性 因此,数控机床的功能要求和设计要求与普通机床有较大的差异。数控机床的结构设计要求可以归纳为如下几方面: 1、具有大切削功率,高的静、动刚度和良好的抗振性能; 2、具有较高的几何精度、传动精度、定位精度和热稳定性; 3、具有实现辅助操作自动化的结构部件。
数控机床应具有更高的静、动刚度 刚度:是指支承件在恒定载荷或交变载荷作用下抵抗变形的能力 (静刚度)(动刚度) 提高刚度的原因: ①在重载荷的作用下,机床的各部件、构件会受 力变形,引起刀具和工件的相对位置的变化 ②机床刚度差—影响机床抗振性
【精品毕设】简易机械手机械结构设计
机电工程学院 《专业综合课程设计》 说明书 课题名称:简易机械手机械机构设计 学生姓名:沈柳根学号:20110611119 专业:机械电子工程班级:11机电 成绩:指导教师签字: 2015年1月5日
摘要 简易机械手是工业机械手的简化,功能相似,而工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。工业机械手是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。工业机械手设计是机械制造、机械设计和机械电子工程等专业的一个重要教学环节,是学完技术基础课及有关专业课以后的一次专业课程内容得综合设计。通过设计提高学生的机械分析与综合能力、机械结构设计的能力、机电液一体化系统设计的能力,掌握实现生产过程自动化的设计方法。 通过对于气动机械手的设计,展现了各个相关学科知识在这里的整合,有利于理解专业知识。 关键词:简易机械手;结构设计;气动
目录 摘要....................................................... 错误!未定义书签。 1 设计任务介绍及意义 (1) 1.1设计任务意义: (1) 1.2设计任务要求介绍: (1) 2 总体方案设计 (3) 2.1 结构分析 (3) 2.3 设计简介 (3) 3 机械传动结构设计 (5) 3.1传动结构总体设计 (5) 3.2手指气缸的设计 (6) 3.3纵向气缸的设计 (12) 3.4横向气缸的设计 (13) 4最终图纸 (15) 4.1装配图 (15) 5 总结 (16) 参考文献 (17)
数控机床的机械结构汇总
第一节机械结构的主要特点与基本要求 一、数控机床对机械结构的基本要求 从数控技术的特点看,由于数控机床采用了伺服电动机,应用数字技术实现了对机床执行部件动作顺序和运动位移的直接控制,传统机床的变速箱结构被取消了,因而机械结构也大大简化了。数字控制还要求机械系统有较高的传动刚度且没有传动间隙,以确保控制指令的执行和控制品质的实现。同时由于计算机水平和控制能力的不断提高,同一台机床上允许更多功能部件同时执行所需要的各种辅助功能已成为可能,因而数控机床的机械结构比传统机床具有更高的集成化功能要求。 从制造技术发展的要求看,随着新材料和新工艺的出现以及市场竞争对低成本的要求,金属切削加工正朝着切削精度和速度越来越高、生产效率越来越高和系统越来越可靠的方向发展。这就要求在传统机床基础上发展起来的数控机床精度更高、驱动功率更大,机械结构动、静、热态刚度更好,工作更可靠,能实现长时间连续运行和有尽可能少的停机时间。 综合上述原因,数控机床对其基本要求可归纳为要有更高的精度,更好动、静态刚度,以适应高速运动的耐用度和工作可靠性。 二、数控机床机械结构构成 典型数控机床的机械结构主要由基础件、主传动系统、进给传动系统、回转工作台、自动换刀装置及其他机械功能部件等几部分组成。 数控机床的基础件通常是指床身、立柱(或横梁)、工作台、底座等结构件,由于其尺寸较大,俗称“大件”,构成了机床的基本框架。其他部件附着在基础件上,有的部件还需要沿着基础件运动。由于基础件起着支承和导向的作用,因而对基础件的基本要求是刚度好。此外,由于基础件通常固有频率较低,在设计时,还希望它的固有频率能高一些,阻尼能大一些。 和传统机床一样,数控机床的主传动系统将动力传递给主轴,保证系统具有切削所需要的转矩和速度。但由于数控机床具有比传统机床更高的切削性能要求,因而要求数控机床的主轴部件具有更高的回转精度、更好的结构刚度和抗振性能。由于数控机床的主传动常采用大功率的变速电动机,因而主传动链较传统机床短,不需要复杂的变速机构。由于自动换刀的需要,具有自动换刀功能的数控机床主轴在内孔中需要有刀具自动送开和夹紧装置。 数控机床的进给驱动机械结构是直接接受计算机发出的控制指令,实现直线或旋转运动的进给和定位,对机床的运行精度和质量影响最明显。因此,对数控机床传动系统的主要要求是精度、稳定性和快速响应的能力,即要它能尽快地根据控制指令要求,稳定地达到需要的加工速度和位置精度,并尽量小地出现振荡和超调现象。 根据工作要求回转工作台分成两种类型,即数控转台和分度转台。数控转台在加工过程中参与切削,相当于进给运动坐标轴,因而对它的要求和进给传动系统的要求是一样的。分度转台只完成分度运动,主要要求分度精度指标和在切削力作用下保持位置不变的能力。转塔刀架在原理和结构上都和分度转台类似。
气动机械手升降臂结构设计分享
毕业设计(论文) 题目: 气动机械手升降臂结构设计,面板操纵式(有动力)点位示教部分控制软件设计
摘要 本文简要介绍了工业机器人的概念,机械手的组成和分类,气动技术的特点,PLC控制的特点,触摸屏的特点及国内外的发展状况。 本文对机械手进行总体方案设计,确定了机械手的技术参数。同时,设计计算了机械手的升降臂和回转臂结构,设计了机械手的手部结构。 本文系统地研究了机械手的气动系统,对气压系统工作原理图的参数进行了了解,大大提高了绘图效率和图纸质量。 利用可编程序控制器(PLC)对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,对机械手的面板操纵式(有动力)点位示教部分控制软件进行了设计。 关键词:工业机器人;机械手;气动;可编程序控制器;触摸屏;示教
Abstract This thesis gives a brief introduction of the conception of industrial robot and domestic and overseas development of industrial robot, including components and categories of manipulator, the characteristics of the system of air pressure drive technique and PLC, and the features of touch screen calibration. This thesis makes a general designation and decides the technique parameter of manipulator. Meanwhile, it designs the elevator arm and Rotary arm structure of manipulator as well as the construction of the hand part. This thesis focus on the analyzing of the air pressure drive system of manipulator and the study of the air pressure system working principle diagram datum, which helps a lot to make a improvement in charting. With the help of PLC we attain the controlling of manipulator. In this thesis, I choose the proper type of PLC, work out the manipulation program of PLC controller according to the working progress of manipulator, and design the manipulation software of the manipulation of Control panel (Dynamic) -Point Demonstration part. Keywords: industrial robot; manipulator; air pressure drive; PLC; touch screen; Demonstration
机械机电专业毕业设计_工业机械手结构的设计
序 机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。 1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年该公司和普鲁曼公司合并成立万能自动公司,专门生产工业机械手。 1962年美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。 1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国机械制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业。 联邦德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。 日本是工业机械手发展最快、应用最多的国家。自1969年从美国引进两种机械手后大力从事机械手的研究。 前苏联自六十年代开始发展应用机械手,至1977年底,其中一半是国产,一半是进口。 工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更
数控车床4工位自动回转刀架结构设计
目录 目录----------------------------------------------------------------1 第1节自动回转刀架总体设计--------------------------------------------------------------2 1.1概述-----------------------------------------------------------2 1.2数控车床自动回转刀架的发展趋势--------------------------------------------------2 1.3自动回转刀架的工作原理-----------------------------------------3 第2节主动传动部件的设计计算-----------------------------------------------------------5 2.1蜗杆副的设计计算------------------------------------------------5 2.2轴承的选用------------------------------------------------------7 第3节刀架体的设计-------------------------------------------------8 第4节控制系统的选择-----------------------------------------------8 4.1单片机的工作原理------------------------------------------------9 4.2刀架控制流程图--------------------------------------------------10 第5节结论---------------------------------------------------------12 参考文献------------------------------------------------------------14
机械手结构设计
机械手结构设计Newly compiled on November 23, 2020
轻型平动搬运机械手的设计及运动仿真 摘要 随着工业自动化发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手的设计计算过程。 首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体座标的形式。同时,本文给出了这台机械手的主要性能规格参量。 文章中介绍了搬运机械手的设计理论与方法。全面详尽的讨论了搬运机械手的手部、腕部、手臂以及机身等主要部件的结构设计。 最后使用软件对机械手的手部实现运动仿真。 关键词:机械手;运动仿真;液压传动;液压缸; 目录 中文摘要 (1) 英文摘要 (2) 主要符号表 (5) 1 绪论 (1) 前言 (1) 工业机械手的简史 (1) 工业机械手在生产中的应用 (3) 建造旋转零件(转轴、盘类、环类)自动线 (3) 在实现单机自动化方面 (3) 铸、锻、焊热处理等热加工方面 (3) 机械手的组成 (4)
执行机构 (4) 驱动机构 (4) 控制系统分类 (5) 工业机械手的发展趋势 (5) 本文主要研究内容 (6) 本章小结 (6) 2机械手的总体设计方案 (7) 机械手基本形式的选择 (7) 机械手的主要部件及运动 (7) 驱动机构的选择 (8) 机械手的技术参数列表 (8) 本章小结 (8) 3 机械手手部的设计计算 (9) 手部设计基本要求 (9) 典型的手部结构 (9) 机械手手抓的设计计算 (9) 选择手抓的类型及夹紧装置 (9) 手抓的力学分析 (10) 夹紧力及驱动力的计算 (11)
手抓夹持范围计算 (12) 机械手手抓夹持精度的分析计算 (13) 弹簧的设计计算 (14) 本章小结 (16) 4 腕部的设计计算 (17) 腕部设计的基本要求 (17) 腕部的结构以及选择 (17) 典型的腕部结构 (17) 腕部结构和驱动机构的选择 (18) 腕部的设计计算 (18) 腕部设计考虑的参数 (18) 腕部的驱动力矩计算 (18) 腕部驱动力的计算 (19) 液压缸盖螺钉的计算 (20) 动片和输出轴间的连接螺钉 (21) 本章小结 (22) 5 臂部的设计及有关计算 (23) 臂部设计的基本要求 (23) 手臂的典型机构以及结构的选择 (24)
数控车床自动回转刀架结构设计
哈尔滨理工大学课程设计说明书 设计题目:数控车床自动回转刀架结构 设计 班级: 学号: 姓名: 指导老师: 日期: 设计任务 题目:数控车床自动回转刀架结构设计 任务:设计一台四工位立式回转刀架,适用于C616或C6132经济型数空车床。要求绘制自动回转刀架的机械结构图。推荐刀架所用电动机的额定功率为 90W,额定转速1480r/min,换刀时要求刀架转动的速度为40r/min,减速装置的传动比为i=37。 总体结构设计 1、减速传动机构的设计 普通的三项异步电动机因转速太快,不能直接驱动刀架进行换刀,必须经过适当的减速。根据立式转位刀架的结构特点,采用蜗杆副减速时最佳选择。蜗杆副传动可以改变运动的方向,获得较大的传动比,保证传动精度和平稳性,并且具有自锁功能,还可以实现整个装置的小型化。 2、上刀体锁紧与精定位机构的设计 由于刀具直接安装在上刀体上,所以上刀体要承受全部的切削力,其锁紧与定位的精度将直接影响工件的加工精度。本设计上刀体的锁进玉定位机构选用端面齿盘,将上刀体和下刀体的配合面加工成梯形端面齿。当刀架处于锁紧状态时,上下端面齿相互啮合,这时上刀体不能绕刀架的中心轴旋转;换刀时电动机正转,抬起机构使上刀体抬起,等上下端面齿脱开后,上刀体才可以绕刀架中心轴转动,完成转位动作。 3、刀架抬起机构的设计 要想使上、下刀体的两个端面齿脱离,就必须设计适合的机构使上刀体抬起。本设计选用螺杆-螺母副,在上刀体内部加工出内螺纹,当电动机通过蜗杆-涡轮带动蜗杆绕中心轴转动时,作为螺母的上刀体要么转动,要么上下移动。当刀架处于锁紧状态时,上刀体与下刀体的端面齿相互啮合,因为这时上刀体不能与螺杆一起转动,所以螺杆的
机械机床毕业设计46CK6136数控卧式车床机械结构设计
目录 1 数控车床的加工特点分析 (1) 1.1 数控车床的优点 (1) 1.2 数控车床加工特点 (1) 1.3 适合数控车床加工的零件 (2) 2 总体方案设计 (3) 2.1 主传动的组成部分 (4) 2.2 机床主要部件及其运动方式的选定 (5) 2.3 机床参数的拟定 (5) 2.4 各组成部件的特性与所应达到的要求 (8) 3 机床主传动设计 (10) 3.1 主要技术参数的确定 (10) 3.2 电动机的选择 (18) 3.3 齿轮传动的设计计算 (19) 3.4 轴的设计计算 (21) 4 横向进给系统的设计计算 (33) 4.1 滚珠丝杠螺母副的选择计算 (33) 4.2 步进电机的选择 (37) 5.1 绘制控制系统结构框图 (40) 5.2 选择中央处理单元(CPU)的类型 (41) 5.3 存储器扩展电路设计 (41) 5.4I/O接口电路及辅助电路设计 (42) 参考文献 (47) 致谢 (48) 附录 (49)
1 数控车床的加工特点分析 1.1 数控车床的优点 数控车床已越来越多的应用于现代制造业,并发挥出普通车床无法比拟的优势,数控车床主要有以下几优点: (1)传动链短,与普通车床相比主轴驱动不再是电机皮带齿轮副机构变速,而是采用横向和纵向进给分别由两台伺服电机驱动运动完成,不再使用挂轮、离合器等传统部件,传动链大大缩短。 (2)刚性高,为了与数控系统的高精度相匹配,数控车床的刚性高,以便适应高精度的加工要求。 (3)轻拖动,刀架(工作台)移动采用滚珠丝杠副,摩擦小,移动轻便。丝杠两端的支承式专用轴承,其压力角比普通轴承大,在出厂时便选配好;数控车床的润滑部分采用油雾自动润滑,这些措施都使得数控车床移动轻便。 1.2 数控车床加工特点 (1)自动化程度高,可以减轻操作者的体力劳动强度。数控加工过程是按输入的程序自动完成的,操作者只需起始对刀、装卸工件、更换刀具,在加工过程中,主要是观察和监督车床运行。但是,由于数控车床的技术含量高,操作者的脑力劳动相应提高。 (2)加工零件精度高、质量稳定。数控车床的定位精度和重复定位精度都很高,较容易保证一批零件尺寸的一致性,只要工艺设计和程序正确合理,加之精心操作,就可以保证零件获得较高的加工精度,也便于对加工过程实行质量控制。 (3)生产效率高。数控车床加工是能再一次装夹中加工多个加工表面,一般只检测首件,所以可以省区普通车床加工时的不少中间工序,如划线、尺寸检测等,减少了辅助时间,而且由于数控加工出的零件质量稳定,为后续工序带来方便,其综合效率明显提高。 (4)便于新产品研制和改型。数控加工一般不需要很多复杂的工艺装备,通过编制加工程序就可把形状复杂和精度要求较高的零件加工出来,当产品改型,更改设计时,只要改变程序,而不需要重新设计工装。所以,数控加工能大大缩短产品研制周期,为新产品的研制开发、产品的改进、改型提供了捷径。 (5)可向更高级的制造系统发展。数控车床及其加工技术是计算机辅助制造的基础。
机械手结构设计
焦作大学 毕业设计 题目液压传动机械手的结构设计 系别机电工程学院 专业机械制造与自动化专业 班级 1001086班 姓名刘笑笑 学号 100108643 指导教师刘敬平 日期 2012年11月
机电工程学院毕业设计 设计任务书 设计题目: 液压传动机械手的结构设计 设计要求: 1.总装配图以及部分结构图至少五个图(折合为两张A1图纸) 2.结构设计论文(5000字以上) 设计进度要求: 第一周:选择毕业设计课题 第二周第三周:查阅相关资料,了解机械手结构原理及其相关数据第四周第五周:书写设计论文 第六周:检查各项数据及论文 第七周第八周:画装配图 指导教师(签名):
机电工程学院毕业设计 摘要 本次设计的液压传动机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要的装配图,机械手的机械结构采用油缸、螺杆、导向筒等机械器件组成,采用液压驱动。主要结构为:手部结构、腕部结构、臂部结构。 本设计只是液压机械手的结构部分,拟开发的上料机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,可抓取重量较大的工件。 关键词:机械手,臂部结构,腕部结构,手部结构
机电工程学院毕业设计 目录 1机械手参数确定--------------------------------------------------------------------------------------- (1) 1.1 臂力的确定--------------------------------------------------------------------------------------- (1)1.2工作范围的确定---------------------------------------------------------------------------------- (1)1.3 确定运动速度-------------------------------------------------------- (1)1.4 手臂的配置形式------------------------------------------------------ (2)1.5 位置检测装置的选择-------------------------------------------------- (2) 1.6 驱动与控制方式的选择------------------------------------------------ (3) 2 手部结构------------------------------------------------------------------------------------------(4)2.1概述-------------------------------------------------------------------------------------------------------(4)2.2 设计时应考虑的几个问题----------------------------------------------------------------------------(4)2. 3 驱动力的计算-----------------------------------------------------------------------------------------(5) 2.4 两支点回转式钳爪的定位误差的分析------------------------------------------------------------(8) 3 腕部的结构---------------------------------------------------------------------------------------(10)3.1 概述------------------------------------------------------------------------------------------------------(10)3.2 腕部的结构形式--------------------------------------------------------------------------------------(10) 3.3手腕驱动力矩的计算-----------------------------------------------------(11) 4 臂部的结构-------------------------------------------------------------------------------------(14)4.1 概述----------------------------------------------------------------------------------------------------(14) 4.2手臂直线运动机构-----------------------------------------------------------------------------------(14) 4.2.1手臂伸缩运动------------------------------------------------------------------------------------(15) 4.2.2 导向装置---------------------------------------------------------------------------------------(15) 4.2.3 手臂的升降运动-------------------------------------------------------------------------------(16)4.3 手臂回转运动----------------------------------------------------------------------------------------(17)4.4 手臂的横向移动-------------------------------------------------------------------------------------(17)4.5 臂部运动驱动力计算------------------------------------------------------------------------------(18) 4.5.1 臂水平伸缩运动驱动力的计算------------------------------------------------------------(18) 4.5.2 臂垂直升降运动驱动力的计算------------------------------------------------------------(19) 4.5.3 臂部回转运动驱动力矩的计算---------------------------------------(19) 5 致谢-----------------------------------------------------------------------------------------------------(21)6参考文献--------------------------------------------------------------------------------------------------(22
中型卧式车床主轴箱传动系统结构设计开题报告
中型卧式车床主轴箱传动系统结构设计开题报告重庆大学网络教育学院 学生毕业设计(论文)开题报告 一、课题的目的及意义(含国内外的研究现状分析): 课题研究的目的: 本课题是以数控车床为研究目标,从其主轴箱及主传动系统结构入手,对其系统结构设计、结构组成分析、分级变速分析、传动件的计算分析的几个方面进行研究。为优化传动系统结构和改善传动系统的精度及稳定特性提供必要的理论依据通过本课题的研究,使数控机床结构更加紧凑,性能更加优越,生产加工更加精密。 国内外相关研究现状和发展趋向 (一)国内外数控机床现状: 近年来我国企业的数控机床占有率逐年上升,在大中企业已有较多的使用,在中小企业甚至个体企业中也普遍开始使用。在这些数控机床中,除少量机床以FMS 模式集成使用外,大都处于单机运行状态,并且相当部分处于使用效率不高,管理方式落后的状态。 与国外的数控机床相比,我国数控机床还存在以下几方面的问题: 产品质量、可靠性及服务等能力不强。国产机床在质量、交货期和服务等方面与国外著名品牌相比存在较大的差距。在质量方面,国产数控系统的可靠性指标MTBF与国际先进数控系统相差较大。国产数控车床、加工中心的MTBF与国际上先进水平也有较大差距。在交货期方面,绝大多数企业由于任务重拖期交货。服务体系不健全,在市场开拓、成套技术服务、快速反应能力等方面不能满足市场快节奏和个性化的要求。
自主创新能力不足。长期以来,我国机床制造业的基础、共性技术研究工作主要在行业性的研究院所进行。能力薄弱,技术创新投入不足,引进消化吸收能力差,低水平生产能力过剩,自主创新能力不高,缺乏优秀技术人才。虽然国产数控机床制造商通过技术引进、海内外并购重 1 组以及国外采购等获得了一些先进数控技术,但缺乏对基础共性技术的研究,忽视了自主开发能力的培育,企业的市场响应速度慢。 功能部件发展滞后。机床是由各种功能部件(主轴单元及主轴头、滚珠丝杠副、回转工作台和数控伺服系统等)在床身、立柱等基础机架上集装而成的,功能部件是数控机床的重要组成部分。数控机床整体技术与数控机床功能部件的发展是相互依赖、共同发展的,所以功能部件的创新也深深地影响着数控机床的发展。我国数控机床功能部件已有一定规模,电主轴、主轴单元、数控系统等也有专门的制造厂家,其中个别产品的制造水平接近国际先进水平。但整体上,我国机床功能部件发展缓慢、品种少、产业化程度低,精度指标和性能指标的综合情况还不过硬。目前,滚珠丝杠、数控刀架、电主轴等功能部件仅能满足中低档数控机床的配套需要。衡量数控机床水平的高档数控系统、高速精密电主轴、高速滚动功能部件等还依赖进口。 (二)数控机床发展趋势: 高速、精密、复合、智能和绿色是数控机床技术发展的总趋势。主要表现在: ;被更多人接受,1. 机床复合技术进一步扩展随着数控机床技术进步,复合加工技术日趋成熟复合加工机床发展正呈现多样化的态势。 2.智能化技术有新突破数控机床的智能化技术有新的突破,在数控系统的性能上得到了较多体现。
数控车床结构设计
学号: 毕业设计说明书 G RADUATE D ESIGN 设计题目:数控车床结构设计 学生姓名 专业班级: 学院: 指导教师:
2007年6 月20 日 目录 摘要 ..................................................................................................................... 1Abstract ........................................................................................ 错误!未定义书签。 1 绪论 (3) 1.1 前言 (3) 1.2 问题的提出 (4) 1.3 文献综述 (4) 1.3.1 国内外数控技术的发展概况 (4) 1.3.2 我国数控技术的发展趋势 (6) 1.4 本课题研究的目的及意义 (8) 2 数控车床的总体设计方案 ................................................... 错误!未定义书签。 2.1 数控车床的组成、布局和特点 .................................. 错误!未定义书签。 2.1.1 数控车床的结构组成 ....................................... 错误!未定义书签。 2.1.2 数控车床的布局 ............................................... 错误!未定义书签。 2.1.3 数控车床的特点 ............................................... 错误!未定义书签。 2.2 数控车床的设计方法和特点 ...................................... 错误!未定义书签。 2.2.1 数控车床的设计方法 ....................................... 错误!未定义书签。 2.2.2 设计方法的特点 ............................................... 错误!未定义书签。 2.2 数控车床的设计步骤 .................................................. 错误!未定义书签。 2.3.1 主要技术指标设计 ........................................... 错误!未定义书签。 2.3.2 总体方案设计 ................................................... 错误!未定义书签。 3 数控车床的具体设计 ........................................................... 错误!未定义书签。 3.1 床身的设计 .................................................................. 错误!未定义书签。 3.1.1床身的肋板布置和结构形状 .............................. 错误!未定义书签。 3.1.2床身的支撑 .......................................................... 错误!未定义书签。 3.1.3床身的材料 .......................................................... 错误!未定义书签。 3.2 工作台的设计 .............................................................. 错误!未定义书签。
三自由度机械手的结构设计论文
三自由度机械手的结构设计 摘要 本文简要介绍了机械手的概念,机械手的组成和分类,国内外的发展状况及发展前景。 本文对机械手进行总体方案设计,结合生产实际及理论确定了机械手的结构及动作过程,坐标型式和自由度数,并列出了机械手的技术参数。 设计出了机械手的驱动方案、控制方案,在进行控制方案的选取时进行了不同方案的优缺点的对比,最后确定了具体的控制方案。在进行机械手控制器件的选取时,对控制器件选择进行了详细的分析,如对步进电机参数的具体选取。最后介绍了利用可编程序控制器对机械手进行控制,同时叙述了可编程序控制器选取原则及工作过程,并绘制出了可编程序控制器外部接线图。在用可编程序控制器控制时分为手动和自动两种工作方式,并绘制了自动工作方式的顺序功能图。 关键词机械手的概念,机械手控制器件,可编程序控制器(PLC) ThREE DEGREES OF FREEDOM MANIPULATOR DESIGN ABSTRACT
目录 中文摘要 (1) 英文摘要 (2) 一、引言 1.1简要介绍机械手的概念 (4) 1.2机械手的组成和分类 (5) 1.2.1机械手的组成 (5) 1.2.2机械手的分类 (5) 1.3国内外发展状况 (6) 二、三轴自由度机械手的结构及动作过程 (7) 2.1机械手的结构 (7) 2.2机械手的动作过程 (8) 2.3机械手的驱动方案设计 (9) 2.4机械手的控制方案设计 (9) 2.5机械手的座标型式与自由度 (10) 2.6机械手的技术参数列表 (11) 三、控制器件选型 (11) 3.1步进电机及其驱动器选择 (11) 3.2直流电机及其驱动器选择 (12) 3.3旋转编码器的选择 (14) 四、机械手的PLC控制设计 (15) 5.1可编程序控制器的选择 (15) 5.2可编程序控制器的工作过程 (16) 总结 (19) 致谢 (20) 参考文献 (20) 附录 (21)
MJ-50型数控车床机械结构设计
本科毕业设计(论文)通过答辩 摘要 数控车床是集机械、电气、液压、气动、微电子和信息等多项技术为一体的机电一体化产品。是机械制造设备中具有高精度、高效率、高自动化和高柔性化等优点的工作母机。数控机床的技术水平高低及其在金属切削加工机床产量和总拥有量的百分比是衡量一个国家国民经济发展和工业制造整体水平的重要标志之一。数控车床是数控机床的主要品种之一,它在数控机床中占有非常重要的位置,几十年来一直受到世界各国的普遍重视并得到了迅速的发展。 因此了解数控车床的结构与工作原理是操作、维修、改进数控车床的前提,也是设计一款数控车床的基本。基于此本文介绍了数控车床的主轴系统、伺服进给系统、刀架系统等的特点、设计要求及结构特点,对于系统部件也作了介绍。 关键词:数控车床主轴系统伺服进给系统刀架系统
本科毕业设计(论文)通过答辩 第 页 2 Abstract Numerical-controlled Lathe is a electromechanical integration product,which is multinomial technology for one-piece. Numerical- -controlled Lathe is multituded by mechanism 、 electric 、hydraulic 、 pressure,pneumatic 、 electrino 、information and so on. It is main working machine and possesses high precision 、 high efficiency 、high automation and high flexibility in the mechanical manufacturing equipment.The technology capability of Numerical-controlled Lathe and percentage of machine output and in possession of amount is one of the important signal weighting the whole level of one state national economy extend and commercial manufacture Numerical-controlled Lathe is one of main variety of Numerical-controlled Machine,it take a important place in the Numerical-controlled Machine,and for decade years,it is given the prevalence regard from all the world and get the prompt develop. Therefore study the structure and working principle is the premise of operate 、maintain 、improve Numerical-controlled Lathe, also it is the basic of designing Numerical-controlled Lathe.Introduced the characteristics, the design request and the structure characteristicses of Principal axis system 、Servo system and Tools system of Numerical-controlled Lathe according to this text, also made a introduction for the system parts. Keywords: NCLathe Principal axis system Servo system Tools system