双电机同步控制系统的设计与仿真
基于遗传算法的双缸同步系统仿真研究
基于遗传算法的双缸同步系统仿真研究近年来,由于发动机功率增加和更复杂的发动机控制系统,同步系统的稳定性、智能性和性能变得越来越重要。
双缸同步系统是最常见的同步系统,其具有很好的动力性能和平稳性,但它的控制方案相对比较复杂,容易受到噪声干扰。
由于传统控制方法在实际应用中存在不足,需要进一步研究和改进。
因此,本文提出了基于遗传算法的双缸同步系统仿真模型,以改进双缸同步系统的动力性能和平稳性。
首先,建立了一个双缸同步系统的数学模型,模拟了系统的运动特性,接着,通过遗传算法,确定了动力控制器参数,使得系统能够实现智能控制,从而实现性能改进。
为了验证所提出的模型,进行了仿真实验。
实验结果表明,在考虑到各种不确定性和扰动的情况下,采用遗传算法的双缸同步系统的动力特性和稳定性要比传统控制方法更好,而且该控制方案具有较好的容错性,在单次扰动或多次扰动的情况下仍能保持稳定。
因此,基于遗传算法的双缸同步系统控制方案可以有效地改善双缸同步系统的动力性能和平稳性。
本文研究了一种新的双缸同步系统控制方案,即基于遗传算法的双缸同步系统仿真模型,用于改进双缸同步系统的动力性能和稳定性。
实验结果表明,该控制方案在考虑各种不确定性和扰动的情况下具有良好的动力性能和稳定性,而且可以容错性较好地应对单次扰动或多次扰动。
当前,研究范围有限,对双缸同步系统的模型和控制方案尚有改进的空间。
未来有待进一步深入研究,如多级双缸同步系统控制方案等,以提高双缸同步系统的动力性能和稳定性。
综上所述,本文提出了基于遗传算法的双缸同步系统仿真模型,以改进双缸同步系统的动力性能和平稳性,实验结果表明,该模型具有良好的动力性能和稳定性,可以更有效地实现智能控制。
未来的研究将继续改进双缸同步系统的模型和控制方案,以提高双缸同步系统的动力性能和稳定性。
双永磁电机系统转速同步控制
双永磁电机系统转速同步控制发表时间:2019-08-29T14:03:48.907Z 来源:《云南电业》2019年2期作者:郭庆华[导读] 随着科学技术的发展,电力电子技术也得到了空前的发展,同时带动了电机控制技术多样性。
文章对双永磁电机系统转速同步控制进行了研究分析,以供参考。
(哈尔滨电机厂有限责任公司黑龙江省哈尔滨市 150040)摘要:随着科学技术的发展,电力电子技术也得到了空前的发展,同时带动了电机控制技术多样性。
文章对双永磁电机系统转速同步控制进行了研究分析,以供参考。
关键词:永磁同步电机;自抗扰控制;伺服系统1前言永磁同步电机(Permanentmagnetsynchro-nous-motor,PMSM)具有结构简单、工作效率高等特点,在工业、交通、军事和航空等重要领域得到广泛应用。
但永磁同步电机存在强耦合、参数易变和非线性等特点,要考虑参数及负载变化对控制性能的影响。
目前常用的控制策略如PID控制,它是以系统的偏差进行控制,控制简单,易于实现,但是PID是采用线性方法,对于非线性系统来说,在抗扰动方面难以实现高精度的控制。
2电机控制技术20世纪70年代德国学者提出矢量控制理论来解决交流电机转矩控制问题。
1985年,德国的教授提出了直接转矩控制方法。
近年来,矢量控制和直接转矩控制技术不断发展,且有各自不同的应用领域。
随着现代控制理论和电子技术的发展,各种控制方法不断出现。
2.1磁场定向矢量控制技术矢量控制是由德国学者F.Blaschke提出的控制理论,又可称为磁场定向矢量控制(FieldOrientedControl,FOC),控制的基本原理是通过坐标变换将定子电流解耦为相互正交的励磁电流分量(Id)和转矩电流分量(Iq),通过单独控制Id和Iq来实现电磁转矩和磁场的解耦。
在矢量控制方法中,转子磁链难以准确的观测得到,同时对电机参数的准确性也要求较高,进而需要增加额外的检测设备,如位置传感器,因而造成系统的结构更加复杂,使得系统成本增加,并且在矢量控制的变换过程复杂的情况下,导致系统的控制精度和响应速度无法保证。
双电机同步控制原理
双电机同步控制原理
双电机同步控制原理是指通过控制两个电机的转速和位置,使它们能够协同工作,达到同步运动的目的。
这种控制方式广泛应用于机械、航空、汽车等领域,可以提高设备的生产效率和精度,降低故障率和维修成本。
双电机同步控制的实现需要依靠先进的电子技术和控制算法。
常用的控制方法包括PID控制、模糊控制、神经网络控制等。
其中,PID控制是最常用的一种方法,它通过对电机的转速和
位置进行测量和反馈,动态调整控制信号,使两个电机保持同步运动。
模糊控制和神经网络控制则更加高级,能够处理更为复杂的控制问题。
在实际应用中,双电机同步控制需要考虑多种因素。
首先是电机的选型和匹配,需要保证两个电机具有相同的参数和性能,以便实现同步运动。
其次是传感器的选择和安装,需要精确测量电机的转速和位置,并将数据反馈给控制器。
此外,还需要考虑电源和接线等因素,以确保系统的稳定性和安全性。
总之,双电机同步控制是一种重要的技术手段,可以提高设备的生产效率和精度,广泛应用于各个领域。
随着科技的不断发展,双电机同步控制的应用前景将越来越广阔。
基于PFC算法的双电机同步运动控制研究

《 业 控 制 计 算 机 } 0 年 第 2 工 21 1 4卷 第 8期
5 3
转动惯量 , B为 阻 尼 系数 。
出可 以平 缓 的到 达 设 定 值 , 而 避 免 出现 超 调 , 据 预 测 输 出值 从 根 和 过 程 的实 际输 出值 ,可 以事 先 规 定 一 条 渐 近趋 向 于 未 来 设 定
errt= n t一 D , f r () f () y L() o i f () 1
其 中 , , 预 测 模 型 的状 态 向量 ; , X ER 是 Y ER 是预 测模 型 的输 出 : U∈R ,是 系 统 的控 制 量 输 入 ; ∈R , ∈R , ’ G H ’ C ∈R ’ 预 测 模 型 状 态方 程 的 系数 矩 阵 。 是 ( ) 差 预 测及 补偿 3误
5 2
基 于 P C 算 法 的 双 电机 同步 运 动 控 制 研 究 F
基于 P C算法的双电机同步运动控制研究 F
S u y o wo Moo s S n h o ie t n t d fT t r y c r nz d Mo i Co t s d o P C Arh t o n r Ba e n F i me i ol t c
s t m s n y ed, d t e m a h m a ialm o i s a ih yse i a alz an h t e t dels e t bl ed. s c tol d y t pe m p s o s as d n PI a d c s I i on r l b wo s ed co en atr b e o D n t e P C ogr an he p f r F pr am, d t ero man e i c m pa e b m ul k si uainTh up ir y ofP c s o r d y Si i m lt e s er i FC onr l o a n o ot c to prgr m i s o en prv .
电动方程式赛车双电机动力系统设计与仿真

电动方程式赛车双电机动力系统设计与仿真作者:仝志辉吴全君游远翔来源:《现代电子技术》2019年第15期摘 ;要:比较现有电动方程式赛车电机布置方式,综合考虑赛车的动力系统布置形式,确定双电机设计方案。
首先,确立赛车整车参数及动力性能目标参数,对双电机参数、电池参数、传动比进行匹配设计;其次,建立电动方程式赛车模型及循环工况;最后,使用Cruise软件对电动方程式赛车进行赛事动力性、经济性工况仿真分析。
分析结果表明,双电机动力系统能满足赛事需求,对电动赛车动力系统设计有一定指导意义。
关键词:电动方程式赛车; 双电机动力系统; 赛车模型; 仿真分析; 参数匹配; 电机驱动中图分类号: TN99⁃34 ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码: A ; ; ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1004⁃373X(2019)15⁃0139⁃05Design and simulation of Dual⁃motor power system for electric formula racing carTONG Zhihui, WU Quanjun, YOU Yuanxiang(School of Energy and Power Engineering, North University of China, Taiyuan,030051, China)Abstract: In comparison with the motor layout modes of existing electric formula cars, the dual?motor design scheme is determined by comprehensively considering the power system layout of the racing car. Firstly, the parameters of the whole racing car and the target parameters of the power performance are established, and the matching design of the double motor parameters, battery parameters and transmission ratio is carried out. Secondly, the model of the electric formula racing car and its circulating condition are established. Finally, the dynamic properties and economic conditions of the electric formula racing car are simulated and analyzed by means of Cruise software. The analysis results show that the dual⁃motor power system can meet the requirements of the racing event and has certain guiding significance for the design of electric car power system.Keywords: electric formula car; dual⁃motor power system; racing car model; simulation analysis; parameter matching; motor drive0 ;引 ;言大学生方程式汽车大赛(FSAE)目的在于培养汽车行业乃至整个机械制造业的专业人才,为在校大学生提供一个创新实践平台。
两台变频器同步控制两台电动机的原理和方法
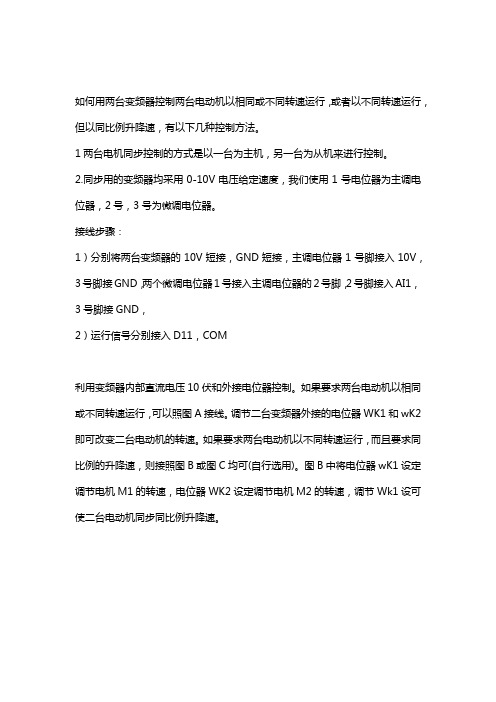
如何用两台变频器控制两台电动机以相同或不同转速运行,或者以不同转速运行,但以同比例升降速,有以下几种控制方法。
1两台电机同步控制的方式是以一台为主机,另一台为从机来进行控制。
2.同步用的变频器均采用0-10V电压给定速度,我们使用1号电位器为主调电位器,2号,3号为微调电位器。
接线步骤:
1)分别将两台变频器的10V短接,GND短接,主调电位器1号脚接入10V,3号脚接GND,两个微调电位器1号接入主调电位器的2号脚,2号脚接入AI1,3号脚接GND,
2)运行信号分别接入D11,COM
利用变频器内部直流电压10伏和外接电位器控制。
如果要求两台电动机以相同或不同转速运行,可以照图A接线。
调节二台变频器外接的电位器WK1和wK2即可改变二台电动机的转速。
如果要求两台电动机以不同转速运行,而且要求同比例的升降速,则接照图B或图C均可(自行选用)。
图B中将电位器wK1设定调节电机M1的转速,电位器WK2设定调节电机M2的转速,调节Wk1设可使二台电动机同步同比例升降速。
图c中Wk1为总调电位器(同步同比例升降速);电位器WK2设定调节电机M1的转速,wK3设定调节电机M2的转速,该方法相对灵活方便。
2.利用一台输出电压可调的稳压电源控制变频器电位器同步调速可按照图D接线。
将变频器外接的二个电位器wK1,WK2并联在稳压电源的输出端,调节wK1和wK2能分别改变二台电机的转速。
调节稳压电源的输出电压,即可对二台电动机进行同比例升降速。
基于滑模交叉耦合的双永磁电机转速同步控制
基于滑模交叉耦合的双永磁电机转速同步控制现在我们来聊聊这个“基于滑模交叉耦合的双永磁电机转速同步控制”,听上去有点高大上,是不是?别怕,我保证你看完后绝对能轻松理解。
这个问题说白了,就是想通过一种聪明的方式,让两台电机的转速保持一致,这样它们才能更好地协同工作。
说到这里,可能有人就要问了,电机转速不就是按需要设定的嘛,为什么还要去“同步”呢?其实不然!假如这两台电机一个快一个慢,不仅会浪费能源,还可能把整个系统搞得乱七八糟。
想象一下,一辆车的左轮和右轮转速不一致,车会走偏吧?就是这么简单,电机要是不同步,那可就麻烦大了。
所以,今天我们要解决的,正是如何让这两台电机的转速像一对好搭档一样默契。
你知道的,电机控制不是想象中那么简单的事,特别是双电机同步控制,它得处理好多复杂的东西。
像电机的负载变化、转速误差、甚至外部的干扰等等。
对了,咱们要用的“滑模控制”可不是一种普通的控制方法。
它就像一个聪明的“老中医”,专门能处理那些突发的情况,不让电机失控。
也许你会想,滑模控制是什么神仙东西?它就是通过一种特殊的“滑模面”,让系统在不稳定的时候也能迅速恢复到正常的状态,哪怕外面有风吹草动,它也能安稳工作。
说得再简单点,滑模控制就像你开车的时候,遇到路面不平,方向盘一扭,车子就自动修正了。
而交叉耦合?这就有点像两台电机互相牵制的关系。
你可以把它想象成两个人的双簧表演,配合得天衣无缝,一个拉得快,另一个马上跟上。
这样,双电机在不同负载条件下,就能保持一种和谐的状态,不会因为一个拖后腿而影响整体表现。
哎,光说理论肯定不过瘾,咱们还是得看实际操作。
你想想,在工业生产中,很多时候都需要用到电机同步,尤其是那些要求高精度、高效率的场合。
比如,双电机驱动的某些机械手臂,或者那些大功率的风扇、泵类设备,若是转速不同步,那就别想顺利运行了。
即使是小小的误差,也可能引起一连串的故障,搞得系统“拖后腿”。
所以,怎么保证电机转速的稳定和同步呢?当然得靠滑模交叉耦合了。
一种雷达转台双电机驱动系统设计与同步控制方法
一种雷达转台双电机驱动系统设计与同步控制方法作者:杨维易先洪来源:《粘接》2024年第07期摘要:作为机械传动系统的一个重要组成,转台被广泛应用于雷达系统中,为满足雷达检测等领域对转台驱动系统惯量、功率、性能方面的要求,提出采用双电机同步驱动转台的方式。
利用双电机伺服系统的电消隙原理和差速耦合负反馈的同步控制方法,由控制器将控制量经数/模转换送入驱动器,以实现系统的消隙功能、同步补偿功能,提高转台驱动系统的精度和同步控制性能,并将其运用到雷达转台伺服系统中,结果证明了方法的可行性,能够提高所设计雷达转台双电机驱动系统的精确性。
关键词:虚拟仪器;双电机驱动系统;同步控制中图分类号:TP273;TH13 文献标识码:A 文章编号:1001-5922(2024)07-0136-04Design and synchronous control method of dual-motordrive system of radar turntableYANG Wei1,YI Xianhong2(1. Shanxi institute of technology,Xi’an 710300,China;2. Chongqing Aude Electric Co.,Ltd.,Chongqing 401120,China)Abstract: As an important component of the mechanical transmission system, the turntable is widely used in the radar system, in order to meet the requirements of inertia, power and performance of radar detection, the method of dual motor synchronous drive platform was proposed. Using the electric clearance principle of double motor servo system and the synchronous control method of differential coupling negative feedback, the controller sends the control quantity into the driver through digital/analog conversion to realize the anti⁃backlash function and synchronous compensation function of the system, improve the accuracy and synchronous control performance of the turntable drive system, and applied it to the radar turntable servo system, the results proved the feasibility of the method, and could improve the accuracy of the designed radar turntabledual⁃motor drive system.Key words: virtual instrument;double motor drive system;synchronous control转台系统的主要研究集中在结构研究、轴系研究、驱动元件研究、电机驱动功放研究、传感器研究、控制技术研究、检测方法研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传统的电气控制系统多采用单一电机实现单轴控制,但是电机的输出转矩有一定的限制,当传动系统需要较大的驱动功率时,必须特制功率与之相匹配的驱动电机和驱动器,使得系统的成本上升,而且过大的输出功率的电机受到制造工艺和电机性能的影响,大功率的驱动器的研制也会受到半导体功率器件的限制。针对以上问题解决方法是采用多个电机对其进行控制,但是多电机之间同步的好坏直接影响到生产效率和产品质量,因此多电机同步控制的研究具有非常重要的现实意义。本文建立了基于双电机偏差耦合为基础的两种偏差控制算法的数学模型,即:对两电机之间的偏差采用模糊PID控制和常规PID控制,并用Matlab仿真软件对其进行了数字仿真。1无刷直流电机双闭环控制系统模型无刷直流电机双闭环控制系统框图如图1所示,它由电流环和速度环组成。在设计电流环和速度环时采用工程设计法进行设计。并且从内环开始,逐步向外环扩大,一环一环地进行设计。电流环的设计在稳态要求上,做到无静差以获得理想的堵转特性;在动态要求上,做到跟随电流给定,超调量越小越好,在本文中,选用典型I型系统对电流调节器进行无电流超调量设计。速度环的设计在稳态时要求无静差,在动态过程中保证它克服负载扰动的能力强,同时要求动态速降小,恢复时间短,从而要求速度环抗干扰性能越强越好,在这里把速度环设计成典型的II型系统。图1速度电流双闭环调速系统的动态结构图2双电机同步控制模型2.1双电机同步控制策略随着近年来工业的发展,需要控制两台及其两台以上电机。保持多电机的协调运转常用的两种方法:一种是机械方法,另一种是电方式。对于电方式的多台电机协调控制的研究主要是深入到速度和力矩的双重协调控制研究,它的研究成功将为军事、航空以及一般工业技术领域等需要统一动作功能的多电机提供协调控制技术。目前存在的同步控制技术包括并行控制,主从控制,交叉耦合控制,虚拟总轴控制,偏差耦合控制(如图2所示)等。
图2双电机同步系统偏差耦合控制结构图采用并行控制,整个系统相当于开环控制,当运行过程中某一台电机受到扰动时,电机之间将会产生同步偏差,同步性能很差。采用主从控制,任何从电机上受到的扰动不能反馈到主电机,也不会影响其他电机,当负载发生变化时,电机之间的同步精度不能够得到保证。交叉耦合控制对于双电机同步来说它等同于偏差耦合控制,但它不适合两个电机以上的电机同步控制。虚拟总轴控制系统在启动,负载发生扰动,停机的过程中,轴之间会产生不同步的现象,并且在主参考值和每个轴之间会保持一个恒定的偏差。偏差耦合控制能够克服其他几种控制策略存在的缺点,实现很好的同步性能。因此本文采用偏差耦合控制策略对双电机进行同步控制它。偏差耦合的主要思想是将某一台电机的速度反馈同其他电机的速度反馈分别作差,然后将得到的偏差相加作为该电机的速度补偿信号。2.2偏差耦合PID控制系统
PID控制有很强的生命力,它对于大多数过程都具有良好
的控制效果和鲁棒性,而且算法原理简明,参数物理意义明确,理论分析体系完整且应用经验丰富。因此针对系统中的抑制干扰特性这一方面的要求可以采用PID控制器。结合以上的电机
双电机同步控制系统的设计与仿真杨晨娜张怡(中国计量学院机电工程学院,浙江杭州310018)
DesignandSimulationforDouble-MotorSynchronousControlSystem
摘要针对双电机同步控制问题,首先建立双电机同步控制系统的数学模型,在分析同步控制的各种控制方式和控制算法优缺点的基础上,提出了在偏差耦合控制方式下采用模糊PID控制算法对偏差进行调节的双电机同步控制方案,并与采用常规PID算法的进行了比较。仿真结果和实验表明,采用模糊PID控制算法的偏差耦合系统优于采用常规PID的系统。关键词:双电机,同步控制,偏差耦合控制,模糊PID控制,PID控制AbstractFortheproblemofsynchronouscontrolfordouble-motor,builtthemathmodelofdouble-motor'ssynchronouscontrolsystem,analyzedtheadvantageandshortcomingofallkindsofcontrolwaysandcontrolarithmetic,basedontherelativecouplingcontrolandusedfuzzyPIDtocontrolthedouble-motor'srelative,theschemeofsynchronouscontrolfordouble-motorwaspresented,andcomparedwithnormalPID's.TheresultshowsthatthesystemofrelativecouplingwhichadoptfuzzyPIDisbetterthanPID's.Keywords:double-motor,synchronouscontrol,relativecouplingcontrol,FuzzyPIDController,PIDcontroller
双电机同步控制系统的设计与仿真36《工业控制计算机》2009年22卷第1期双闭环控制模型和偏差耦合控制,对两台电机反馈回来的速度差作差,再进行PID调节作为当负载有变化时的速度反馈额外补偿。补偿器的设定是电机1的偏差与电机2的偏差相减得到一个偏差值,进行PID调节,在对偏差反馈给电机时,电机1是正反馈,而电机2是负反馈。
图3双电机偏差耦合PID控制系统结构图2.3偏差耦合模糊PID控制系统
当把图3中阴影PID模块换成图4的模块时,双电机偏差耦合PID控制系统就成了双电机偏差耦合模糊PID控制系统。模糊控制系统一般按系统偏差及偏差变化率来实现对工业过程的控制。这里的偏差和偏差变化率为两电机之间的速度差和速度差变化率。模糊PID控制器的主要作用是根据设定值和实测值的偏差调节被控量的输入,从而调节电机转速在要求的误差范围内,它包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分。DSP根据两电机的之间的偏差以及当前的偏差变化,对其先进行量化,再根据模糊规则进行模糊推理,接着对模糊参数进行解模糊,输出PID控制器的比例、积分、微分系数。此外,为了弥补一般模糊控制器分档造成的阶梯变化,系统中解模糊输出的并非控制器的实际参数,而是控制器参数的修正量,因此需要加比例、积分、微分修正系数,他们为图4中的kp3和ki3。
图4模糊PI控制器仿真结构图3系统仿真和实验结果
在建立了基于偏差耦合控制方式两种不同控制算法的双电机同步控制系统模型的基础上,本文利用Matlab对它们进行了仿真。针对以上两种系统进行了一系列仿真实验。本文采用Maxon公司生产的EC40型号为118895的无刷直流电机在空
载时进行仿真,其参数为:额定电压U=30V,额定电流I=5.24A,额定功率P=120W,相电阻R=0.518Ω,相电感L=0.132mH,转矩常数Km=24.6mNm/A,电磁时间常数TL=0.255ms
,机械时间
常数Tm=7.3ms,速度常数1/Ce=389rpm/V,电流反馈系数β=
5.73V/A,速度反馈系数α=1/389Vmpr,电流滤波时间常数Toi=0.314ms,转速滤波时间常数Ton=6.28ms,脉宽调制器和PWM变换器的放大系数Ks=1,脉宽调制器和PWM
变换器的开关周
期Ts=12.5μs。所给速度为1000rpm,在0.2s时突给第一台电机加2A电流相当于49.2mNm的阶跃扰动,图5中a为采用偏差耦合PID控制时的两台电机速度响应曲线,图5中b为采用偏差耦合模糊PID控制时的两台电机速度响应曲线。
图5两种系统不同控制算法的仿真效果比较两种仿真结果可以看到,采用偏差耦合模糊PID控制方法时,系统的同步性能、抗干扰性能优于采用偏差耦合PID控制方法时的性能。有了上述的仿真的结果,在已建立的实验平台上,研究两台无刷直流电机在空载的情况下,对第一台电机突加49.2mNm负载扰动,分别采用常规PID补偿器和模糊PID补偿器时对两台电机进行伺服同步控制。图6中a为两电机速度偏差采用常规PID时两台电机速度响应曲线,图6中b为两电机速度偏差采用模糊PID时两台电机速度响应曲线。
图6两种系统不同控制算法的实验效果从图6的两个图形中进行对比可知,两电机的速度偏差采用模糊PID算法时要比采用常规PID算法时获得更好的同步控制精度,增强系统的抗干扰性。4结束语
本文系统基于偏差耦合控制方式,采用模糊PID控制原理,并结合工程设计方法。经过对仿真和实验结果图形的分析比较,得知采用基于偏差耦合的模糊PID控制的系统比采用常规PID控制的系统具有更高的同步精度,提高了电机的跟随性能,增强了系统的鲁棒性,并且兼顾了系统响应的快速性和稳定性的要求。
参考文献[1]龙驹.永磁无刷直流电动机转速控制系统的优化设计[M].成都:西南交通大学出版,2006[2]杨耕,罗应立.电机与运动控制系统[M].北京:清华大学出版社,2006[3]FranciscoJ.Perez-Pinal.ComparisonofMulti-motorSynchro-nizationTechniques[A].The30thAnnualConferenceoftheIEEEIndustrialElectronicsSociety[C],Busan,Korea.2004,(10):2-6[4]文方,姜孝华.多级电机同步驱动控制系统[J].电气传动,2000(5):14-17[5]廉小亲.模糊控制技术[M].北京:中国电力出版社,2003[6]王丹力,赵剡.MATLAB控制系统设计仿真应用[M].北京:中国电力出版社,2007[收稿日期:2008.9.13]
37