iAircraft飞机仿真模型软件包..
飞航模拟技术与运用

一套功能完整的飞航仿真机利用各种技术重现了飞机的系统反应及操作环境,以下分别就模型建立、动感平台、视觉系统、仪表显示仿真、发动机仿真等技术原理进行讨论。
■飞行力学模型
如果各种硬件装置是飞航仿真机的躯体,模型就是赋予它生命的灵魂,其中最重要的一个模型就运用牛顿力学所建立的飞行力学模型。该模型以非线性的尤拉角(Euler Angles)运动方程为主,计算出飞机的姿态与加速度,再经积分为速度与位移后,透过视觉、仪表及动感平台”提示(cue)”给模拟机中的驾驶员。飞航模拟机需要在实时环境下处理所有的计算,一般商用及军用规范都要求要有60 Hz(系统每秒钟给出60个视框),其积分时间常数(Integration Constant)就是16ms,16ms以内,所有的计算模块都必需完成运算而得到输出,如何分配不同模块计算资源而能得到实时的运算就成为一件重要的工作。设计之初,软件工程师会先分析各计算模块所需的耗费时间,以选取适当的计算机硬件与资源规划。
飞航模拟技术与运用
耿骅 / 民航局
数据源:Aircraft interiors international
2007年3月号
模拟的概念建立在三个基础上:系统、模型与运算处理。将自然或人为的各种复杂“系统”依据物理定律“模型”化后,透过对模型输入、输出的“运算处理”,再对系统进行操作、试验或重现的过程,就称为模拟。
飞行力学及感觉提示的仿真包括各类力学模型、飞操(Flight Control)与控制负载(Control Loading)和动感平台(Motion Platform)等。视觉系统包括影像产生器(IG,Image Generator),视觉数据库(Visual Database),投影机(Projector),几何矫正系统(Geometry Correction System)及投影屏幕。较高等级仿真机上使用广角平行光学系统(Collimated System)还要外加一个成像用的双曲线镜(Hyperbolic Mirror)。航电仪表包括所有在座舱中的飞航仪表、飞行管理系统、雷达、武器投放等等;次系统仪表则涵盖几乎所有除发动机外的其他配备,诸如电气、液压、气压…等等。简单的仪表显示多以软件仿真,复杂的功能如果嫌软件仿真太费事,也可以直接安装价格高昂的装机件(如FMS等)。发动机仿真不仅仿真显示数值,其模型计算出来的推力值也作为力学模型的输入。
飞机金属蒙皮拉形仿真技术研究进展

DOI: 10.3969/j.issn.1000-6826.2021.02.0004飞机金属蒙皮拉形仿真技术研究进展Research Progress on Simulation Technology of Aircraft-metal Skin Stretch供稿|张修路1,高盛昊1,黄文超2 / ZHANG Xiu-lu1, GAO Sheng-hao1, HUANG Wen-chao2金属蒙皮零件是民用飞机公司各个项目钣金零件中最重要的产品构成。
目前钣金零件作为飞机的主要构件,而蒙皮零件又是最具钣金特点、最重要的钣金零件。
可以说,蒙皮零件的制造能力是民用飞机钣金制造能力的一个标志。
零件制造中心是以钣金制造为主要内容的零件制造单元,企业一般会在该中心配备很多专业大型钣金设备。
双曲度蒙皮拉伸成形设备——蒙拉机就是其中最重要的钣金设备之一,如图1所示。
金属蒙皮是飞机结构气动外形中最主要的零件之一,其一般定义为包覆飞机整个气动外形的薄板零件(包括壁板)。
在钣金工艺中,也将加强板等工艺制造方法类似的零件定义为蒙皮类零件。
而拉形类蒙皮普遍都是双曲度蒙皮,分布在机头、尾段和舱门等位置,尺寸比较小(个别的超过6 m),厚度不大于4 mm,蒙皮内形往往带有较浅的减重化铣格,蒙皮材料均为2xxx系列铝合金。
图 1 双曲度蒙皮拉伸成形机由于是双曲度蒙皮,从工艺角度上说,成形相对比较复杂,几乎都采用拉伸成形,通常的做法是依靠蒙拉机工作台面上下运动的顶升和两端夹钳的拉伸包覆运动使板料贴模,获得金属蒙皮的形状,其拉伸成形的好坏将直接影响航空航天器的整个外作者单位:1. 沈阳城市学院,辽宁沈阳 110112;2. 中航沈飞民用飞机有限责任公司,辽宁 沈阳 110110形气动性和机器使用寿命[1]。
然而,在以往金属蒙皮的拉形过程中都是按照分析人员的工作经验进行设计,这种传统的拉伸成形过程中往往会出现断裂、起皱、粗晶、回弹及滑移线等缺陷,如图2所示。
基于模型的飞机机电系统研发流程浅析

基于模型的飞机机电系统研发流程浅析随着计算机技术、系统工程及控制工程的发展,仿真技术在航空、航天、电力、通信、化工、生物等多领域得到了广泛的应用。
就飞机系统工程而言,由于其具有良好的定义、结构和丰富可用的理论知识,可以对系统模型进行演绎、推理、试验、分析,因此,系统仿真业已成为系统/设备设计、研发的不可或缺的环节。
1、系统仿真的国内外现状目前,欧美等已将系统仿真纳入其飞机系统研发流程。
据美国波音公司B787飞机工程报告,该型机研制时,波音公司就系统仿真规定如下:与系统/设备供应商签署模型协议书,确定模型需求和实施计划;规定模型两级限定,并对两级模型适用范围、验证分析内容、建模技术、仿真工具平台等均作了要求;明确分工关系。
设备供应商负责设备级建模、维护,编制模型设计说明、校核验证说明。
波音公司负责系统模型的集成、仿真。
欧洲空客公司则主导、实施CRESCENDO计划,在系统仿真的基础上,发展飞机级数字样机(Aircraft Behavioural Dataset)。
该计划拟通过仿真,在工程上获得以下收益:减少10%的研发周期和费用;减少50%的重复劳动;减少20%的物理试验费用。
在国内,航空主辅机厂所在工程、预研中也开展了大量的系统/设备仿真工作,很多单位也根据自己的专业特点建立了工具平台,初步形成仿真的技术能力。
很多单位业已将仿真纳入到其系统/设备的工程研发流程中,如,在空气动力设计时CFD计算已是基本流程,在航空发电机研发过程中仿真已成为设计手段。
相较欧美,系统仿真差距主要表现有:工程领域,尚未形成支撑系统需求、方案、研发、试验、评估的全流程验证能力;在工程中,尚未形成飞机级、大系统仿真验证能力,尚未形成主辅机厂所间协作关系,复杂系统仿真的组织经验、技术经验不足;单位间、专业间系统仿真的平台不协调,数据传递困难,数据缺乏统一管理。
2、机电系统仿真的工程需求站在飞机级、大系统级的角度,机电系统仿真主要有以下工程需求:a)设计需求从方案阶段开始即必须将整个机电系统甚至全机系统进行综合权衡、优化、指标与参数匹配,确认系统方案对飞机要求的满足;基于模型开展精益设计和充分验证,在系统和产品满足技术要求的前提下,减少“过设计”;飞机研制各阶段都需要对方案、设计实现快速迭代验证,以期尽早发现设计缺陷,提高设计质量,避免将设计缺陷带至生产、试飞环节。
大型飞机高空环境模拟系统仿真优化研究

Cui Yi Pang Liping W ang Jun (School of Aeronautic Science and Technology,Beijing University of Aeronautics and Astronautics,Beijing 100083,China)
第 3期
C 舱 内 空 气 P 冷板冷 空气 O 出 口参数 i 进 口参 数 add 加 入 热 量 。 带走热 量
Hale Waihona Puke 大 型 飞 机 高 空 环 境 模 拟 系 统 仿 真 优 化 研 究
d 对 流换 热 dr 导 热 W 舱 壁 y 压气 机 t 涡 轮 l 保 温层
维普资讯
39
1 引 言
发展 大型 飞机是 保 障国家安 全 、促 进 国 民经 济发 展 的重大 举措 。飞机 飞行 中 ,乘 员生命 安全 以及 机载 设备 可靠性 等将 受 到 高 空特 殊 环 境 的影 响 。针对 大 型飞机提 出的高空 综合 环 境 模 拟 系统 是 一 种 能 够在 地 面上模 拟 出各 种 飞行 高度 对 应 的温 度 、压力 、湿 度 等 多参数 综合作 用 环 境 的仿 真 系统 。该 系 统 能够 对 大 型飞机 的设计 、研 制 以及 试 飞等环 节提供 不 可或缺 的实 验数 据 资 料 ,从 而 最 终 为保 障高 空 飞 行 做 出 贡 献 。
2008年第 3期 总第 163期
低 温 工 程
CRY0GENICS
维普资讯
NO.3 2008 Sum NO.163
大 型 飞机 高 空 环 境模 拟 系统 仿 真优 化 研 究
崔 娥 庞 丽 萍 王 浚
(北 京 航 空 航 天 大 学 航 空 科 学 与 工 程 学 院 北 京 100083)
飞机目标动态RCS仿真技术研究
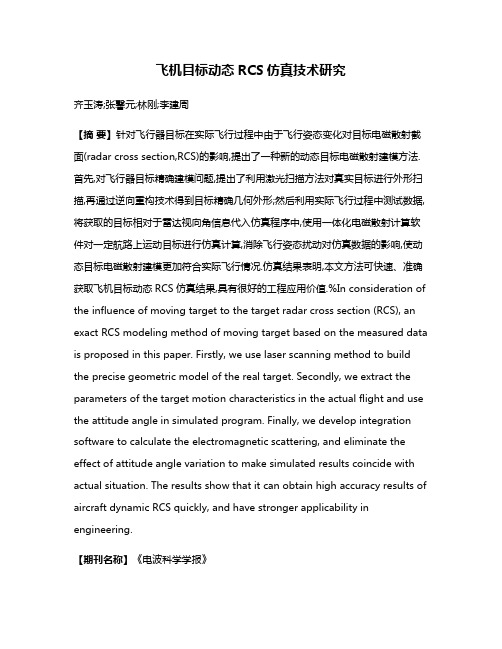
飞机目标动态RCS仿真技术研究齐玉涛;张馨元;林刚;李建周【摘要】针对飞行器目标在实际飞行过程中由于飞行姿态变化对目标电磁散射截面(radar cross section,RCS)的影响,提出了一种新的动态目标电磁散射建模方法.首先,对飞行器目标精确建模问题,提出了利用激光扫描方法对真实目标进行外形扫描,再通过逆向重构技术得到目标精确几何外形;然后利用实际飞行过程中测试数据,将获取的目标相对于雷达视向角信息代入仿真程序中,使用一体化电磁散射计算软件对一定航路上运动目标进行仿真计算,消除飞行姿态扰动对仿真数据的影响,使动态目标电磁散射建模更加符合实际飞行情况.仿真结果表明,本文方法可快速、准确获取飞机目标动态RCS仿真结果,具有很好的工程应用价值.%In consideration of the influence of moving target to the target radar cross section (RCS), an exact RCS modeling method of moving target based on the measured data is proposed in this paper. Firstly, we use laser scanning method to build the precise geometric model of the real target. Secondly, we extract the parameters of the target motion characteristics in the actual flight and use the attitude angle in simulated program. Finally, we develop integration software to calculate the electromagnetic scattering, and eliminate the effect of attitude angle variation to make simulated results coincide with actual situation. The results show that it can obtain high accuracy results of aircraft dynamic RCS quickly, and have stronger applicability in engineering.【期刊名称】《电波科学学报》【年(卷),期】2019(034)001【总页数】7页(P97-103)【关键词】动态目标;逆向工程;雷达散射截面(RCS);电磁散射【作者】齐玉涛;张馨元;林刚;李建周【作者单位】中国飞行试验研究院, 西安, 710089;中国飞行试验研究院, 西安, 710089;中国飞行试验研究院, 西安, 710089;西北工业大学电子信息学院, 西安, 710072【正文语种】中文【中图分类】TN957引言目标电磁散射特性在隐身与反隐身技术中有着重要的研究价值,也是雷达信息系统的一个重要组成部分.其中目标的雷达散射截面(radar cross section,RCS)反映了目标对照射电磁波的散射能力,是表征目标特性最基本、最重要的参数[1].在实际情况中,目标总是处于运动状态,因此,对动态目标电磁散射特性研究具有非常高的实际价值.外场测量是获取动态目标电磁散射特性的主要手段,但外场测量试验需耗费大量的人力、物力及时间.因此,需对动态目标高精度电磁散射建模技术进行研究.目前,对于复杂目标静态电磁散射特性仿真已经做了大量研究,但对动态目标的仿真计算相对比较欠缺.文献[2]分析了气流对飞行姿态扰动的影响,基于准静态法分析了目标的RCS特性;文献[3-4]根据目标航迹解算了雷达视线角信息,并对姿态扰动采用了正态分布随机数进行修正,解算了目标动态RCS仿真值;文献[5]研究了静态数据获取动态特性过程中的坐标变换和姿态一致性问题.上述文献都是从理论上针对目标姿态变化对电磁散射特性影响进行分析,不能全面反映目标在运动状态下相对于测量雷达视向变化情况,且目标姿态扰动模型还需进一步验证[6];目标几何模型方面,现有研究普遍精度不足,进而影响仿真计算精确性,也不能对仿真算法的改进提供支撑.本文基于真实目标激光扫描数据和实际飞行测试数据,提出一种新的动态目标电磁散射建模方法.首先利用激光扫描方法获取目标外形扫描点云,采用逆向几何建模技术,获取目标高精度几何模型,然后利用实际飞行过程中测试数据,将获取的目标相对于雷达视向角信息代入仿真程序中,最后利用一体化的电磁散射计算软件进行仿真计算,从而获取典型运动状态下复杂目标电磁散射特征.本文研究成果既可对现有装备进行建模仿真,提高测试效率,也可对非合作目标进行电磁散射预估.1 复杂目标精确几何建模复杂目标精确几何模型是电磁散射建模的基础,以往研究过程中往往由于复杂目标几何模型不够精细,仿真计算结果不能准确反映目标散射特征.几何模型误差是电磁散射建模主要的误差源之一.为保证建模精确度,获取复杂目标精确三维模型,本文采用逆向重构技术对真实目标进行扫描建模.逆向工程技术[7]是进行产品开发、设计以及改进的重要技术手段,通常包括数据采集、数据处理和CAD(computer aided design)模型重建三个主要环节.数据采集是利用全站仪、手持式扫描仪、三维激光扫描仪等设备对真实目标表面进行扫描,测出目标表面的若干组点的几何坐标,为全面获取目标扫描数据,可多次对目标进行扫描.飞机目标点云数据采集采用激光三角法和激光束极坐标法两种方法进行测量,激光三角法对曲面曲率较大部位进行测量,激光束极坐标法对测量范围较大、曲面可测性好的曲面进行测量.图1为模型飞机机翼扫描点云.图1 某型飞机机翼扫描点云Fig.1 The point cloud data of aerofoil shape在逆向测量过程中,飞机目标采集的点云数据量一般都很大,而且不可避免地会引入噪音点,为提高建模效率,提升建模质量,需要对测量数据进行处理.对测量噪音点,采用高斯滤波算法、均值滤波算法或中值滤波算法,可有效去除测量毛刺.对测量数据采样处理,采用文献[7]中局部迭代插值方法进行处理,用较少的点云数据完整表达被测对象的特征信息.由于飞机目标点云数据量大,因此在建模前可对点云模型进行区域划分,然后利用三维建模软件(如CATIA、UG等)重构各区域外形曲面,最后将各部分曲面在三维建模软件中进行装配、合并,从而获取高精度飞机CAD模型.图2为获取的模型飞机三维几何模型.图2 某型飞机三维几何模型Fig.2 The 3D model of plane2 目标动态特征获取飞机目标动态测量主要采用地面测量雷达对目标进行跟踪测量,动态测量数据区别于静态数据,主要包括[8]:1) 目标运动时由于相对位置的实时变化而引入的姿态角变化.2) 在飞行过程中,由于气流或风力作用导致的飞机姿态扰动.这两个因素导致了飞机目标在飞行过程中姿态不断变化,对于复杂目标,由于散射机理复杂,微小的姿态扰动都会导致电磁散射特性产生较大变化,因此,需要对动态目标姿态精确计算.目标姿态角包含方位角和俯仰角二维信息.文献[3, 9]等是用飞机目标全空域静态RCS数据库,根据飞机性能参数和空气动力学原理生成航线,再通过插值生成航线上动态RCS序列.该方法一方面需要计算4π立体角内足够密集的目标RCS数据,仿真效率较低;另一方面,航线数据计算和引入的随机扰动模型不能精确描述真实目标运动特征.本文针对上述问题,通过真实试验测量数据确定飞机目标在典型飞行状态下测量雷达照射的姿态角信息,通过计算,得到一定航线上目标运动过程中的姿态角变化.由于是利用飞机和地面测量雷达实时记录的数据进行目标姿态角计算,测量误差对计算结果影响有限,能够比较准确地描述目标运动特征.对于非合作目标,可采用基于航迹及飞行动作对目标航向角、俯仰角和横滚角预估,结合测量雷达信息获取较高精度的目标运动特性.飞机姿态角常利用飞机上安装的惯性导航系统测量记录飞机的航向角、俯仰角和横滚角,然后利用雷达测量的方位角和高低角在同一时标下进行合成计算.若地面测量雷达在飞机机体坐标系中坐标为(xt(t),yt(t),zt(t)),可用式(1)和式(2)解算出雷达视线在目标坐标系中方位角φ(t)和俯仰角θ(t).雷达坐标系与目标坐标系关系如图3所示.有关坐标系变换关系,可参考文献[10]相关部分,本文不再赘述.(1)(2)图3 机体坐标与雷达坐标关系Fig.3 The relation of radar coordinate systems and plane coordinate systems3 一体化电磁散射计算对于飞机等大型复杂目标,由于目标尺寸大,散射机理复杂,在现有电磁散射计算方法中,若要满足计算精度要求,往往计算周期较长,而且对计算资源要求比较高,若采用物理光学法(physical optics,PO)等高频算法,现有计算软件往往忽略了边缘绕射及目标腔体散射,计算精度不足,而且缺乏一体化分析计算环境,这些都制约了电磁散射建模技术的工程应用.针对上述问题,本文以UG(Unigraphics)建模软件为开发平台,将研究开发的图形电磁计算(graphical electromagnetic computing, GRECO)方法、增量长度绕射系数(incremental length diffraction coefficients, ILDC)及弹跳射线(shootingand bouncing ray, SBR)法集成到UG软件中,形成一套集众多散射机理计算于一体的综合分析计算环境,具有计算速度快、精度高的特点,能够满足复杂目标电磁散射计算的需要.图4为本文计算用一个边长0.866 m,高1.5 m的三棱柱,入射波频率1 GHz,垂直极化.本文方法的具体实现算法可参考文献[11]和文献[12].图4(a)为三棱柱模型与文献结果,文献分别给出了PO、PO+MEC(等效电磁流)以及MoM(矩量法)计算结果.图4(b)为本文计算结果与电磁仿真商业软件FEKO计算结果的对比,FEKO设置为PO计算,从结果可看出,本文计算方法在偏离镜面反射区也可有较高精度.计算步进为0.5°,本文计算耗时为2分钟55秒,FEKO计算耗时3分钟23秒,从计算效率来说,本文计算方法也比较好.(a) 三棱柱及文献结果(a) Model of triangular prism and the results in the literature(b) 仿真结果对比(b) Comparison of simulation results图4 三棱柱及计算结果Fig.4 Triangular prism and simulation result目前很多被广泛使用的三维CAD软件(如CATIA、Pro/E等)都可以方便地导入到UG中去,因此高精度动态目标几何模型就可方便地使用一体化软件打开,并精确反映目标模型细节.利用UG提供的应用程序接口UG/Open 和UG/Open++,可将实际飞行过程中目标相对测量雷达姿态角信息在计算程序中进行设置,并根据其变化情况设置模型动态信息,就可对目标动态特性精确建模仿真.本文动态目标电磁散射建模技术研究流程图如图5所示.图5 动态目标电磁散射计算流程图Fig.5 The flow chart of moving target’s modeling4 计算结果对图2所示目标,选取飞机相对于地面测量雷达侧站平飞状态进行仿真计算.飞机飞行高度H=5 km,飞行速度260 m/s,航线投影与原点垂直距离8 km,测量雷达位置为坐标原点,模拟单脉冲测量雷达,仿真入射波频率为9.5 GHz,垂直极化.飞行航迹示意图如图6所示.图6 飞机飞行航迹示意图Fig.6 The diagram of airline依据飞机姿态信息与雷达测量角度,可得出飞机方位视向角和俯仰视向角,如图7所示.(a) 方位角(a) Angles of azimuth(b) 俯仰角(b) Angles of pitch图7 目标方位视向角和目标俯仰视向角Fig.7 Target’s angles o f azimuth and pitch目标飞行过程中RCS仿真结果如图8所示.图8 目标动态RCS仿真数据Fig.8 The simulation result of target’s RCS由于复杂目标RCS是姿态敏感的,姿态角的微小变化都会造成RCS的剧烈变化,本文仿例中,由于目标运动引起的观测视角变化,RCS动态范围达40 dB以上,RCS的动态特性比较符合实际测量情况.在计算效率方面,100个计算点,共耗时4分钟32秒,并且省去了网格剖分过程,实现了快速、高效计算.对图9所示F-35模型进行动态特性仿真,模型尺寸为13.4 m×10.7 m×3.5 m,模型按纯金属模型处理,入射波频率为10 GHz,VV极化.以真实飞机飞行过程中航线作为仿真数据来源,计算出目标方位视向角和俯仰视向角信息如图10所示,RCS仿真结果如图11所示.图9 F-35飞机三维模型Fig.9 Three-dimensional model of F-35 aircraft(a) 方位角(a) Angles of azimuth(b) 俯仰角(b) Angles of pitch图10 目标视向角度信息Fig.10 The angles of target图11 F-35飞机仿真数据Fig.11 The simulation result of F-35 aircraft5 结论本文提出了一种动态目标电磁散射建模的新方法.首先基于真实目标激光扫描点云数据和逆向重构技术获取目标高精度几何模型,再根据实际测试获取的目标姿态信息采用一体化电磁散射计算软件对目标动态RCS特性进行仿真,具有快速、高效的特点.本文研究方法是外场动态测量试验的重要补充,可为飞行试验航线设计和飞行方法制定提供重要参考,也可对非合作目标动态电磁散射特性进行预估,具有重要的实际工程应用价值.参考文献【相关文献】[1] 黄培康, 殷红成, 许小剑.雷达目标特性[M].北京:电子工业出版社,2005.HUANG P K, YIN H C, XU X J. Radar target characteristic[M]. Beijing:Publishing House of Electronics Industry,2005.[2] 苏东林, 曾国奇, 刘焱,等.运动目标RCS特性分析[J].北京航空航天大学学报,2006,32(12):1413-1417.SU D L,ZENG G Q,LIU Y,et al.RCS study of moving radar target[J].Joumal of Beijing University of Aeronautics and Astronautics, 2006, 32(12):1413-1417.(in Chinese)[3] 张晨新, 庄亚强, 张小宽,等.动目标雷达散射截面的建模研究[J].现代雷达,2014,16(12):66-69. ZHANG C X,ZHUANG Y Q,ZHANG X K,et al.A study modeling of moving target’s radar Cross Section[J].Modern radar, 2014,16(12):66-69.(in Chinese)[4] 刘万萌, 童创明, 王童,等.飞机运动特征对雷达检测性能的影响分析[J]. 空军工程大学学报(自然科学版),2017,21(1):7-12.LIU W M,TONG C M,WANG T,et al. Analysis of an influence of aircraft movement feature on radar detection performance[J].Jouranal of air force engineering university(natural science edition), 2017,21(1):7-12.(in Chinese)[5] 李金梁, 曾勇虎, 周波,等.飞机目标静态与动态测量姿态一致性[J]. 北京航空航天大学学报,2013,29(9):453-457.LI J L,ZENG Y H,ZHOU B,et al.Gestuer consistency of airplane target between static and dynamic measurement[J]. Joumal of Beijing University of Aeronautics and Astronautics, 2013,29(9):453-457.(in Chinese)[6] 刘佳, 方宁, 谢拥军,等.姿态扰动情况下的目标动态RCS分布特性[J].系统工程与电子技术,2015,37(4):775-781.LIU J,FANG N,XIE Y J,et al.Dynamic target RCS characterisitic analysis under the influence of attitude perturbation[J].Systems engineering and electronics,2015,37(4):775-781.(in Chinese)[7] 惠广裕, 冯巧宁, 吉宁.基于逆向工程的飞机曲面重建方法研究[J].计算机与数字工程,2015,43(6):1102-1106.HUI G Y,FENG Q N,JI N,et al.Reconstruction of aircraft surface based on reverse engineering[J].Computer & digital engineering,2015,43(6):1102-1106.(in Chinese)[8] 戴崇, 徐振海, 肖顺平.非合作目标动态RCS仿真方法[J].航空学报,2014,35(5):1374-1384. DAI C,XU Z H,XIAO S P.Simulation method of dynamic RCS for non-cooperativetargets[J].Acta aeronautica et astronautica sinica,2014,35(5):1374-1384.(in Chinese) [9] 庄亚强, 张晨新, 张小宽,等.典型隐身飞机动态RCS仿真及统计分析[J].微波学报,2014,30(5):17-21.ZHUANG Y Q, ZHANG C X,ZHANG X K,et al.Statistical analysis and simulation of typical stealth aircraft dynamic RCS[J]. Journal of microwaves, 2014,30(5):17-21.(in Chinese) [10] 周超, 张小宽, 吴国成.基于坐标转换目标动态RCS时间序列研究[J].火力与指挥控制,2014,39(3):56-59.ZHOU C, ZHANG X K,WU G C.Analysis on RCS time series of dynamic target based on coordinate transformation[J]. Fire control & command control, 2014,39(3):56-59.(in Chinese)[11] 李建周, 许家栋, 郭陈江,等.一体化雷达散射截面计算方法研究[J]. 西北工业大学学报,2003,21(4):449-452.LI J Z,XU J D,GUO C J,et al.Integeative RCS(radar cross section)calculation as a much more efficient method of RCS caulation[J].Journal of Northwestern Polytechnical University, 2003,21(4):449-452.(in Chinese)[12] 李建周, 吴昌英, 郑奎松,等.考虑多次散射的复杂目标一体化电磁散射计算[J].微波学报,2012(S2):6-10.LI J Z,WU C Y,ZHENG K S,et al. Integeative electromagnetic scattering calculation of complex targets with multiple scattering structures[J].Journal of microwaves, 2012(S2):6-10.(in Chinese)。
基于Fluent的飞行器气动参数计算方法

基于Fluent的飞行器气动参数计算方法作者:李楠倪原李聚峰牛佳慧田华来源:《现代电子技术》2014年第16期摘要:课题采用湍流模型中的单方程模型,并借助于商业CFD软件Fluent,对某型号飞行器在给定攻角和马赫数下进行气动力仿真。
首先,采用湍流模型中的单方程模型对飞行器的绕流流场进行数学建模;其次,用Gambit软件对飞行器的外形进行几何建模,并进行网格划分和边界条件设定;最后,在Fluent中进行相关参数设置和气动力数值计算及仿真,得出了该型号飞行器升力系数、阻力系数和俯仰力矩系以及飞行器表面的压力分布和来流速度分布,并对结果进行分析。
该研究表明单方程模型能够很好地解决具有壁面限制的飞行器气动力数值计算问题。
关键词:飞行器;气动力;湍流模型; Spalart⁃Allmaras中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)16⁃0068⁃03 Fluent⁃based calculation method of aircraft aerodynamic parametersLI Nan1, NI Yuan2, LI Ju⁃feng2, NIU Jia⁃hui2, TIAN Hua2(1. Xi’an Institute of Electromechanical Information Technology,Xi’an 710065, China;2. College of Electronics and Information Engineering,Xi’an Technological University,Xi’an 710032, China)Abstract: The aerodynamics simulation of an aircraft was performed in a given attack angle and Mach number by means of the single⁃equation (Spalart⁃Allmaras) model in turbulence model and CFD software Fluent. First, Spalart⁃Allmaras model is used to achieve the mathematical modeling for the flow field of the aircraft, the Fluent software package, Gambit is adopted to conduct the geometric modeling of the aircraft’s outline, and then meshes are generated and the boundary conditions are set. Finally, the relevant parameters are set in Fluent, and lift coefficient, drag coefficient, pitching moment coefficient, and pressure and flow velocity distribution on the aircraft surface are obtained by the aerodynamic numerical calculation and simulation. The simulation results also need to be analyzed. The research result demonstrates the Spalart⁃Allmaras model can achieve the aerodynamic numerical calculation of the aircraft withwall⁃surface restriction.Keywords: aircraft; aerodynamics; turbulence model; Spalart⁃Allmaras飞行器在飞行过程中受到周围气流的作用,其表面的压强分布不均匀,因此引起的压力差和气流对飞行器表面产生的粘性摩擦力合共同作用,形成了飞行器上的空气动力[1],而阻力、升力和俯仰力矩等是研究计算空气动力的重要参数。
飞机起落架仿真技术与飞机地面载荷计算

西北工业大学硕士学位论文
摘
要
which controls some key parameter of the active control landing gear, has been investigated by the simulation technique based on the ADAMS and the Matlab toolbox using together. At the last of this thesis, the conclusion can be given that the new simulating technique’s application in aircraft landing gear’s design can make the dynamic analysis of the landing gear more convenient and the calculation of the landing gear’s impact force more precisely. Beside this, the new technique won’t cost so much and can improve the modern level of our aircraft landing gear’s designing. Keyword: landing gear shock absorber; Virtual Prototyping Technology; ground impact force; ADAMS; active controlled landing gear
进行起落架地面载荷计算和缓冲器缓冲性能分析首先在adams下建立了起落架的全机仿真模型和起落架的落震试验仿真模型然后利用所建立的模型进行了多种着陆和滑跑工况下飞机地面载荷的计算以及起落架落震试验的仿真计算分析了起落架缓冲器的缓冲性能及其影响因素最后将adamsmatlab联合仿真技术引入到主动控制起落架缓冲性能的研究分析中利用主动控制系统对缓冲器参数进行调节以改善缓冲器的缓冲性能并分析了主动控制系统对缓冲器缓冲性能的改善作用
基于航迹的飞机姿态角建模与仿真

给 出了飞机 气流倾斜 角的计算公 式。利 用该 公 式推 导 了斜平 面上 飞机 做 变加 速 圆周 运动 气 流倾斜 角的计 算公
式 。通 过 对 比 六 自由度 飞 机 运 动 模 型姿 态 角 的 计 算 结 果 ,验 证 了姿 态 角 计 算 公 式 的 有 效 性 。
关 键 词 :航 迹 ;姿 态 角 ;气 流倾 斜 角 ;迎 角
目前 对 航 迹 姿 态 角 的 仿 真 有 欧 拉 方 程 法 、四 元 素 法 ]、口一口一),滤 波 法 _1 和 动 力 学 方 程 法 。使 用 这 些 方 法 对航迹 姿态角进 行仿 真 时 ,都需 要给 定姿 态 角 的初值 。而 在航迹 已知的情况 下 ,如何 给定 初 值使 得求 得 的姿 态角 与
法 。 重 点 讨 论 了 飞机 气 流 倾 斜 角 的 计 算 方 法 。 首 先 给 出 了 气 流 倾 斜 角 正 切 的 计 算 公 式 ,然 后 利 用 飞 机 在 飞 行 过
程 中 ,左 右 翼 下 沉 与 航 迹 曲 线 主 法 向 向 量 的 指 向之 间 的 关 系 ,给 出 了 确 定 气 流 倾 斜 角 正 负号 的 方 法 ,在 此 基 础 上
函数 r—r(s)关 于 航 迹 曲线 弧 长 s的 一 阶 和 二 阶 导 数 。 本 文 假 设 无 风 且 飞 机 做 无 侧 滑 飞 行 。
在 地 轴 系 下 ,飞 机 的 运 动 学 方 程 为
有 的 关 系m 为
sin  ̄//- I//a 一
sin 0一 COS asin + sin acos COS
tan 一
面
(4) (5) (6)
2 基 于 航 迹 的 姿态 角模 型
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
iAircraft飞机仿真模型
iAircraft是一个飞机仿真模型包,该模型被设计针对用于飞机测试实验室的如“铁鸟”
仿真机以及基于仿真的飞控、航电集成测试实验室。iAircraft可以通过调整参数来代表一大
类的固定翼飞机,如直升机、无人机。iAircraft由一系列Simulink模型组成,可以在Simulink
仿真软件中运行,也可以在ADI的实时仿真计算机系统(rtX, rtX-V, RTS)中运行。iAircraft
是按照这样的架构开发的,即允许在纯仿真模式下进行飞机仿真,同时可以容易的连接真实
的飞机LRU来进行飞机硬件在回路测试,集成以及飞控验证活动。下图展示了iAircraft
Simulink模型的顶层仿真框图。
1. iAircraft 6自由度运动方程模型
飞机6自由度运动方程模型参考旋转的球形大地,是基于Robert M. Howe 在其名为
“Airframe Equations of Motion and Transfer Operators”的论文中所作的工作。飞机6自
由度运动方程模型具有以下特点:
飞机被当作一个刚体进行建模;
采用运动与动力学方程表示飞机运动;
包含飞机质量特性,具备飞机的质量、惯性力矩等参数。
飞机6自由度运动方程模型
2. iAircraft气动力学模型
iAircraft气动力学模型包含风速、动力装置的力和力矩、气动力和力矩、地球轴向力、
平移方程、旋转方程和四元数方程。这个气动力学模型的逼真度及细节的丰富程度足够支持
进行飞机飞控系统的设计以及需要高逼真度的工程飞行仿真机,例如铁鸟仿真机和基于仿真
的集成测试实验室。飞机气动力学具有以下特点:
根据飞行条件以及控制面的偏转,
空气动力学模型计算气动力和力矩;
模型采用查找表方式获取飞机的气动系数。
iAircraft气动力学模型
3. iAircraft作动器模型
iAircraft作动器模型包含以下两种模型:
二阶伺服作动器模型,用于驱动升降舵、方位舵以及副翼。这是一个比例微分反馈
二阶系统,代表了液压型作动器的特性,因此也属于液压系统模型。
高升力后沿槽与前缘缝翼襟翼系统驱动器。
iAircraft作动器模型
4. iAircraft起落架模型
iAircraft起落架模型是基于对波音公司和NASA Ames 研究中心工作的结合。起落架模
型包括前起落架和左、右主起落架。左右主起落架通过采用一个“等价起落架”方式进行计算,
能够代表大多数的主起落架配置。
iAircraft起落架配置
iAircraft起落架模型降落行为曲线
iAircraft起落架模型具有以下功能:
起落架模型接收来自飞行动力学模型提供的位置和方向,并由此决定起落架的力和
力矩;
起落架模型也提供转向和刹车控制输入。
iAircraft起落架模型
5. iAircraft大气模型
根据1976年美国标准大气,设计了大气模型。根据设定的海拔高度,模型可以计算出
预期的环境压力、温度、空气密度以及声速。
iAircraft大气模型
6. iAircraft自动驾驶模型
iAircraft自动驾驶模型包括了一系列的强大功能。iAircraft包括了一个全功能的自动驾驶
组件,为自动起飞和降落提供全套支持。
仰角保持
航线角度保持
速度保持
阻尼控制
倾斜角保持
指向保持
截获&跟踪
iAircraft自动驾驶模型
7. iAircraft涡扇发动机模型
iAircraft涡扇发动机模型提供一个合理精度的模型可用于许多飞行仿真任务,并可以让
iAircraft模型在没有获得详细的发动机阶段数据情况下运行。
iAircraft涡扇发动机模型
给模型根据飞行员驾驶杆油门输入、飞机马赫数、飞机高度和周围气压来计算发动机压
力比和推力。反推力也被包含进了模型中。模型提供有限的瞬态细节和逼真度。这个逼真度
模型的开发是基于波音和NASA之前的飞行仿真工作。
涡扇发动机模型具有以下功能:
该模型根据油门杆输入以及飞行条件,决定发动机压力比以及净推力;
涡扇发动机模型采用查找表方式,决定发动机提供的净推力;
该模型可以支持反向推力命令(负油门杆角度输入),并提供在发动机关闭时风车
阻力的估计值;
推力控制是通过油门杆角度输入进行控制的;
油门杆角度输入范围为-110~40度;
发动机的推力能力是可以通过修改“推力等级”参数进行调整。
8. iAircraft环控系统模型
iAircraft环控系统模型是是固定翼飞机的关键子系统。环控系统模型通过控制空气压力
和温度实现飞机在飞行或地面过程的温控、通风、除湿等功能。环控系统模型还为机务人员
和乘客提供了可呼吸的空气。
iAircraft环控系统模型有以下部分组成:
歧管模型
客舱区域模型
防冰模型
航电设备台架模型
阀流量模型
节流孔模型
热交换器模型
空气循环机——涡扇模型
空气循环机——压缩机模型
空气循环机——转轴动态模型
空气循环机——单独的热交换器模型
空气循环机——风扇模型
8.1 歧管模型
歧管模型具有3个质量流量入口与3个质量流量出口,因此可以连接到3个独立的流量
输入与3个独立的流量输出上。歧管内的温度被假设是均匀的混合物。进出歧管的流速由
外部控制。歧管的温度微分方程是基于能量守恒定律,是输入与输出流动焓率的函数。
比热是温度的函数,通过查找表方式进行计算。歧管压力是根据歧管内的质量,采用理
想气体定律进行计算。而歧管内的质量是基于质量守恒定律进行计算的。
歧管模型
8.2 客舱区域模型
客舱区域模型代表了一段飞机客舱的压力和温度条件。客舱区域温度是根据乘客产生的
热量、温度与调节空气的流速以及通过机身传递到外部空气的热量,进行计算的。此外还有
一个热速率输入端口,用于接收来自其它地方的热,例如航电设备舱。
客舱区域模型
8.3 防冰模型
根据从短笛管流向机翼防冰外壳的引气速率以及来自机翼周围的热传递,防冰模型计算
机翼外壳的温度。
防冰模型
8.4 航电设备台架模型
航电设备台架模型用于计算在航电设备台架里的空气温度。这个计算是根据有航电设备
产生的热量、进入台架的空气流速以及台架与外部环境的热交换来实施的。
航电设备台架
8.5 阀流量模型
阀流量模型用于计算流过打开的蝶形阀的质量流速。有效面积是通过一个阀直径与阀位
置的函数进行计算的。排放系数代表了流量损失补偿(流量不是熵流)。阀流量方程式取决
于上游与下游压力比。如果压力比小于临界压力比,那么通过阀门开度的质量流量阻塞,并
且不依赖于下游的压力。
阀流量模型
8.6 节流孔模型
节流孔模型用于计算通过一个节流孔的质量流速。
节流孔模型
8.7 热交换器模型
热交换器模型代表了一个具有混合流的横向流配置。该模型采用查找表方式,确定以主
要流体及冷却剂的流速为函数的热传递效率。热传递效率是以主要流体流速与冷却剂流速为
函数,进行计算。
热交换器模型
8.8 空气循环机——涡扇模型
该模型计算涡扇出口温度、流速、效率以及功率。涡扇的特性参数,例如流量矫正与效
率,是由用户提供的查找表函数。涡扇模型根据入口与出口流量,计算在涡扇入口出的压力
与温度。
涡扇模型
8.9 空气循环机——压缩机模型
该模型计算压缩机的出口温度、流速、效率以及功率。压缩机的特性参数,例如流量矫
正与效率,是由用户提供的查找表函数。
压缩机模型
8.10 空气循环机——转轴动态模型
转轴被视为惯量,进行建模。在涡扇与任何负载之间的功率差,被用于计算角加速度。
角加速度被集成,用于获取转轴转速。
转轴动态模型
8.11 空气循环机——单独的热交换器模型
空气循环机——单独的热交换模型包含热交换器、压缩机、风扇、转轴以及涡扇模型。
空气循环机——单独的热交换模型
8.12 空气循环机——风扇模型
空气循环机——风扇模型是基于一个函数查找表,来确定基于风速与静态压差的体积流
速。
空气循环机——风扇模型