EKM调试说明书050505
变送器调试说明书

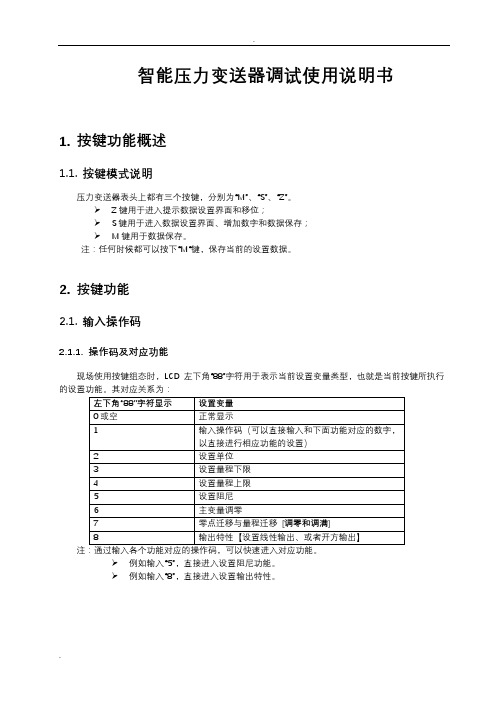
安徽天康股份有限公司智能压力变送器调试使用说明书1.按键功能概述1.1. 按键模式说明压力变送器表头上都有三个按键,分别为“M ”、“ S”、“ Z”。
Z键用于进入提示数据设置界面和移位;S键用于进入数据设置界面、增加数字和数据保存;M键用于数据保存。
注:任何时候都可以按下“M “键,保存当前的设置数据。
2.按键功能2.1.输入操作码2.1.1.操作码及对应功能现场使用按键组态时,LCD 左下角“ 88”字符用于表示当前设置变量类型,也就是当前按键所执行的设置功能。
其对应关系为:左下角“ 88”字符显示设置变量0 或空正常显示1输入操作码(可以直接输入和下面功能对应的数字,以直接进行相应功能的设置)2设置单位3设置量程下限4设置量程上限5设置阻尼6主变量调零7零点迁移与量程迁移[ 调零和调满 ]8输出特性【设置线性输出、或者开方输出】注:通过输入各个功能对应的操作码,可以快速进入对应功能。
例如输入“ 5”,直接进入设置阻尼功能。
例如输入“ 8”,直接进入设置输出特性。
1安徽天康股份有限公司2.1.2. 操作码输入方法图例说明:1.均以当前采集值 1 kPa,量程为 0~ 100kPa 为例2.空心显示的数字、字母、符号,表示当前是闪烁显示在实时正常显示状态,按下Z 键进入组态数据设置状态。
此时左下角显示“1”。
同时数字区第 1 个“ 0”开始闪烁。
按下 Z 键,依次向右移动闪烁位,直到最后一个“ 0”开始闪烁。
按下 S 键,最后一位数字开始从0 增加。
这是输入的数字就是操作码,根据输入的操作码不同,将进入不同的功能。
以进入设置主变量单位为例,进行说明:3.等到增加到“ 2”时,按下“ Z”键,此时左下方有一个箭头开始闪烁。
4.此时按下“ S”键,则进入“设置单位”菜单,此时左下角显示“ 2”。
同时下方显示当前的单位。
说明:如果是 3 按键,则在显示“ 00002”时,直接按下“ M ”键,就可以进入“设置单位” 。
变送器调试说明书
智能压力变送器调试使用说明书1.按键功能概述1.1.按键模式说明压力变送器表头上都有三个按键,分别为“M”、“S”、“Z”。
Z键用于进入提示数据设置界面和移位;S键用于进入数据设置界面、增加数字和数据保存;M键用于数据保存。
注:任何时候都可以按下“M“键,保存当前的设置数据。
2.按键功能2.1.输入操作码2.1.1.操作码及对应功能现场使用按键组态时,LCD左下角“88”字符用于表示当前设置变量类型,也就是当前按键所执注:通过输入各个功能对应的操作码,可以快速进入对应功能。
例如输入“5”,直接进入设置阻尼功能。
例如输入“8”,直接进入设置输出特性。
2.1.2.操作码输入方法图例说明:1.均以当前采集值1 kPa,量程为0~100kPa为例2.2.设置单位2.3.设置量程下限假设原来的量程下限为0,新输入的量程下限为-40kPa。
2.4.设置量程上限2.5.设置阻尼2.6.主变量调零(清零)功能2.7.设置输出特性2.8.零点迁移与量程迁移 [调零和调满]2.9.显示变量设置液晶显示屏能显示“电流”、“百分比”、“主变量”三种变量的一种或交替显示其中的两种(间隔时间4秒)。
在实时正常显示状态,使用S键能更改两个显示变量,当两个显示变量设定为相同的参数,屏幕上固定显示一种变量;当两个显示变量设定为不同的参数时,屏幕上交替显示两种变量。
方法如下:按下“S”键,当前显示变量(如:电流)发生变化,循环显示“电流、百分比、主变量”,当所需要的显示变量(如:主变量)出现在屏幕上时,松开“S”键,即实现了将显示变量“电流”改为“主变量”。
更改显示变量过程中,左下角功能码显示“30”。
例子:假设当前显示变量为“电流”,需要设置为:交替显示“主变量”和“百分比”。
步骤:修改第一个显示变量:按下“S”键,液晶循环显示“电流、百分比、主变量”,当显示“主变量”时,松开“S”键,即可。
此时,液晶交替显示“主变量”和“电流”。
欧姆龙温控器E5CC常用设定
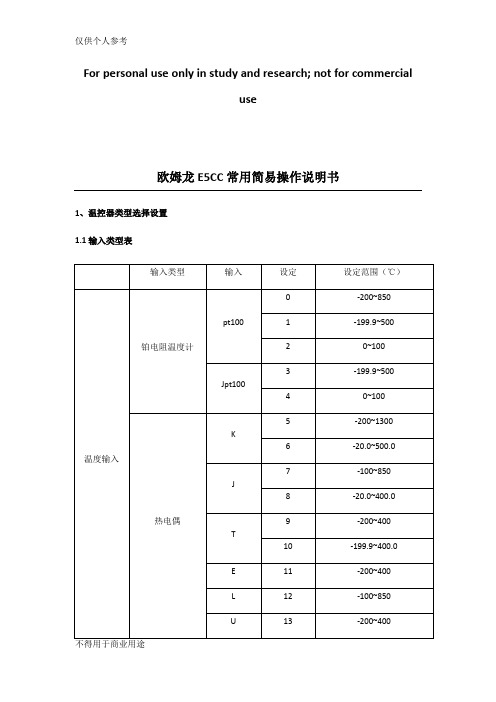
For personal use only in study and research; not for commercialuse欧姆龙E5CC常用简易操作说明书1、温控器类型选择设置1.1输入类型表*当输入类型不是铂电阻而错误的将铂电阻接入时,将会显示“5.ERR”。
为了清除“5.ERR”显示,需要正确接线并重新上电。
1.2输入类型修改设置温控器各部名称及功能长按【菜单键】至少3秒将进入初始设定菜单界面松开,界面右下角显示数字即为当前选择的输入类型,如需修改可按【上调键】或【下调键】来改变,设定完毕后长按【菜单键】直至温控器重启返回。
如:显示数字“5”时,说明当前输入类型为K型热电偶,如需将输入类型改为铂电阻输入,需通过按【上调键】使显示数字变为“0”或“1”或“3”(根据不同测试需要选择设定)。
设定类型表见“1.1输入类型表”。
1.3温控器PID控制设置长按【菜单键】至少3秒将进入初始设定菜单界面松开,单击【模式键】直至界面显示为“”时,通过单击【上调键】或【下调键】来改变,右下端显示为“PiD”时即当前模式为“PiD”控制,设定完毕后长按【菜单键】直至温控器重启返回。
1.4防触碰锁设置长按【菜单键】+【模式键】至少3秒将进入“保护菜单”,通过点击【模式键】切换界面显示至“WEPE”,单击【上调键】或【下调键】使右下角“OFF”变为“ON”,再同时按【菜单键】+【模式键】至少1秒,界面返回至主界面,此时界面会显示“”标志。
如需修改参数,需进行同样操作将“WEPE”变为“OFF”状态。
仅供个人用于学习、研究;不得用于商业用途。
For personal use only in study and research; not for commercial use.Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commercia les.толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях.以下无正文。
testo 550电子歧管仪 说明书

德图仪器-致力于未来——制冷和热泵系统的专业测量工具,两个带温度补精确的测量高低压端压力,并且能自所有的测量结果单屏即可显示,一目可同步测量两点仪器即可实时自动计算和显示过热度和过冷度,所测得,您就能方便的testo 550内置防撞击保护——更安全、更坚固坚固的保护外壳有效的防止了仪器碰撞受损;3个复式连接端口,双通路控制阀证了您能随时随地的方便使用;悬挂钩的运用保证了您在测量中的安全性。
testo 550特别适于在恶劣工作环境下的使用。
行观测;决定吧!testo 550能应用于下列的测量任务:新型的testo 550电子歧管仪——帮助您完成制冷和热泵系统的日常调试维护工作4过热度和过冷度计算通过T550的2个外接温度接口,可同步测量两点温度,仪器即可实时自动计算和显示过热度和过冷度。
特制的管道夹式表面温度探头非常适于管道表面温度的测量。
管钳式探头可以轻易的夹在管道上,快速、精确的测量出管道的表面温度。
testo 550套装1包含1个温度探头,testo 550套装2包含2个温度探头。
同步测量2点温度,让您的测量准确且省时。
带温度补偿的气密性测试通过testo 550的带温度补偿的气密性测试功能,用户可以很方便的测量系统的气密性。
通过测量一段时间内系统的压力和环境温度,即可评估出系统的密封性。
这样,您就能得到在测量开始和结束时的压力(带温度补偿)和温度。
热泵模式在测量逆循环热泵系统时,只需点击按钮激活热泵模式,仪器会自动地进行切换,无需要更换软管。
冷凝和蒸发testo 550能迅速、精确的测量高、低压端的压力,并且自动的计算蒸发、冷凝温度。
系统抽真空在系统的抽真空过程中,歧管仪能直接显示系统的真空度。
testo新型歧管仪产品一览——为您不同的测量要求提供全面的解决方案114 mmØ5 mm280 mmØ4 mm50 mm 可调节Funkmodul zum Aufrüsten des Messgeräts mit Funkoption (Ländervarianten)探头和附件Funkmodul für Messgerät, 869.85 MHz FSK, Zulassung für die Länder DE, FR, UK, BE, NL,ES, IT, SE, AT, DK, FI, HU, CZ, PL, GR, CH, PT, SI, MT, CY , SK, LU, EE, LT, IE, LV , NO Funkmodul für Messgerät, 915.00 MHz FSK, Zulassung für USA, CA, CL Festkabel gestreckt 1,2 mFestkabel gestrecktFunkhandgriffe inkl. Feuchte-Fühlerkopf Funkhandgriff für steckbare Fühlerköpfe, inkl. TE-Adapter, Zulassung für die Länder DE, FR, UK, BE,NL, ES, IT, SE, AT, DK, FI, HU, CZ, PL, GR, CH, PT, SI, MT, CY , SK, LU, EE, LT, IE, LV Funkhandgriff für steckbare Fühlerköpfe, inkl. TE-Adapter, Zulassung für USA, CA, CL Feuchte-Fühlerkopf, steckbar auf den Funkhandgriff 图片300 mm115 mm Ø 5 mmØ 6 mm 50 mm 115 mm 50 mm Ø 4 mmØ 5 mmAnschluss: Festkabel gestreckt 1.2 mAbb. ähnlichAnschluss: Festkabel gestreckt 1.2 mAnschluss: Festkabel gestreckt 1.5 mauch-/Einstechfühler, NTC 2 x 3V-Knopfzelle (CR 2032) 2 Microzellen AAA215 h (Messtakt 0.5 sec)1/2 Jahr (Messtakt 10 sec)Funkhandgriff 图片Än d e r u n g e n , a u c h t e c h n i s c h e r A r t , v o r b e h a l t e n .0980 5641/o a /X X /Q /01.201S e t j e240,-标定证书和电池订货号:0563 5505订购套装A l l e P r e i s e n e t t o , z u z üg l i c h V e r s a n d k o s t e n u n d M w S t . , g ül t i g a b 01.01.2010. Z a h l u n g 30 T a g e n e t t o , 14 T a g e 2 % S k o n t o .订货号:0563 5506testo AGPostfach 1140,79849 Lenzkirch Testo-Straße 1,79853 Lenzkirch Telefon:07653 681-700Telefax:07653 681-701E-Mail:*************Internet:www.testo.deAbb. ähnlich。
调试说明
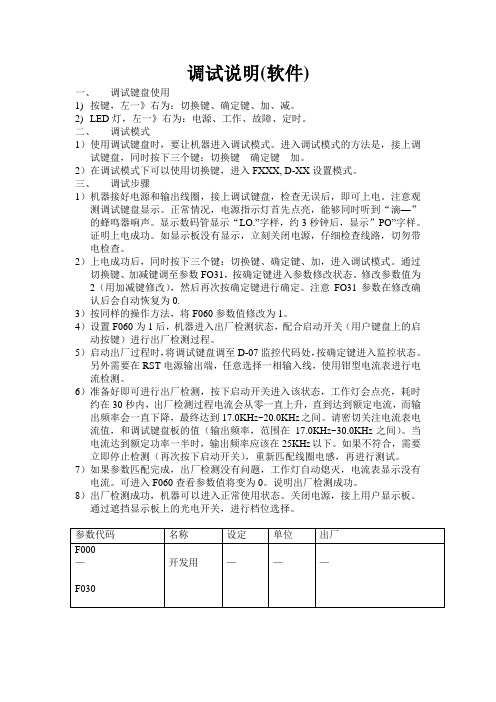
调试说明(软件)一、调试键盘使用1)按键,左一》右为:切换键、确定键、加、减。
2)LED灯,左一》右为:电源、工作、故障、定时。
二、调试模式1)使用调试键盘时,要让机器进入调试模式。
进入调试模式的方法是,接上调试键盘,同时按下三个键:切换键确定键加。
2)在调试模式下可以使用切换键,进入FXXX, D-XX设置模式。
三、调试步骤1)机器接好电源和输出线圈,接上调试键盘,检查无误后,即可上电。
注意观测调试键盘显示。
正常情况,电源指示灯首先点亮,能够同时听到“滴—”的蜂鸣器响声。
显示数码管显示“LO.”字样,约3秒钟后,显示”PO”字样。
证明上电成功。
如显示板没有显示,立刻关闭电源,仔细检查线路,切勿带电检查。
2)上电成功后,同时按下三个键:切换键、确定键、加,进入调试模式。
通过切换键、加减键调至参数FO31,按确定键进入参数修改状态。
修改参数值为2(用加减键修改),然后再次按确定键进行确定。
注意FO31参数在修改确认后会自动恢复为0.3)按同样的操作方法,将F060参数值修改为1。
4)设置F060为1后,机器进入出厂检测状态,配合启动开关(用户键盘上的启动按键)进行出厂检测过程。
5)启动出厂过程时,将调试键盘调至D-07监控代码处,按确定键进入监控状态。
另外需要在RST电源输出端,任意选择一相输入线,使用钳型电流表进行电流检测。
6)准备好即可进行出厂检测,按下启动开关进入该状态,工作灯会点亮,耗时约在30秒内,出厂检测过程电流会从零一直上升,直到达到额定电流,而输出频率会一直下降,最终达到17.0KH Z~20.0KH Z之间。
请密切关注电流表电流值,和调试键盘板的值(输出频率,范围在17.0KH Z~30.0KH Z之间)。
当电流达到额定功率一半时,输出频率应该在25KH Z以下。
如果不符合,需要立即停止检测(再次按下启动开关),重新匹配线圈电感,再进行测试。
7)如果参数匹配完成,出厂检测没有问题,工作灯自动熄灭,电流表显示没有电流。
变送器调试说明书【范本模板】
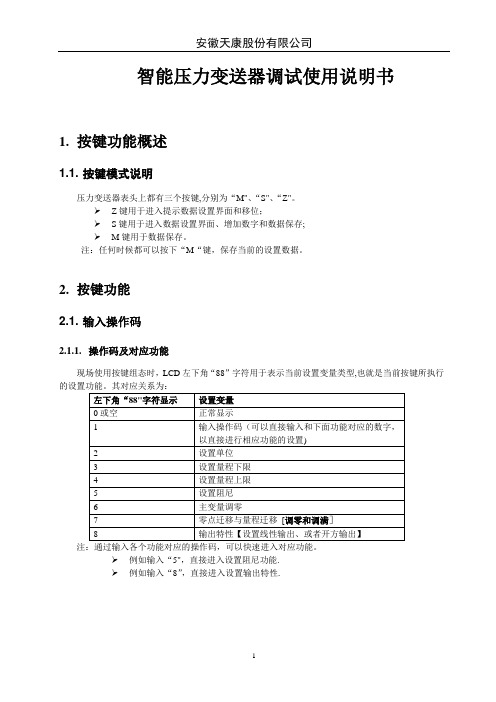
智能压力变送器调试使用说明书1.按键功能概述1.1. 按键模式说明压力变送器表头上都有三个按键,分别为“M"、“S"、“Z"。
➢Z键用于进入提示数据设置界面和移位;➢S键用于进入数据设置界面、增加数字和数据保存;➢M键用于数据保存。
注:任何时候都可以按下“M“键,保存当前的设置数据。
2.按键功能2.1. 输入操作码2.1.1.操作码及对应功能现场使用按键组态时,LCD左下角“88”字符用于表示当前设置变量类型,也就是当前按键所执行注:通过输入各个功能对应的操作码,可以快速进入对应功能。
➢例如输入“5",直接进入设置阻尼功能.➢例如输入“8”,直接进入设置输出特性.2.1.2.操作码输入方法图例说明:1.均以当前采集值1 kPa,量程为0~100kPa为例2.2. 设置单位2.3. 设置量程下限假设原来的量程下限为0,新输入的量程下限为-40kPa。
2.4. 设置量程上限2.5. 设置阻尼2.6. 主变量调零(清零)功能2.7.设置输出特性2.8.零点迁移与量程迁移[调零和调满]2.9.显示变量设置液晶显示屏能显示“电流”、“百分比”、“主变量”三种变量的一种或交替显示其中的两种(间隔时间4秒)。
在实时正常显示状态,使用S键能更改两个显示变量,当两个显示变量设定为相同的参数,屏幕上固定显示一种变量;当两个显示变量设定为不同的参数时,屏幕上交替显示两种变量。
方法如下:按下“S”键,当前显示变量(如:电流)发生变化,循环显示“电流、百分比、主变量”,当所需要的显示变量(如:主变量)出现在屏幕上时,松开“S”键,即实现了将显示变量“电流”改为“主变量”。
更改显示变量过程中,左下角功能码显示“30"。
例子:假设当前显示变量为“电流”,需要设置为:交替显示“主变量"和“百分比”。
步骤:修改第一个显示变量:按下“S”键,液晶循环显示“电流、百分比、主变量”,当显示“主变量"时,松开“S"键,即可.此时,液晶交替显示“主变量”和“电流”。
3151智能压力变送器调校说明
3151智能压力变送器调校说明
3151智能压力变送器调校说明
仪表的现场调校功能是通过调零键(ZERO),调满键(SPAN)来完成的。
具体方法如下:
1、按键开锁:同时按下(ZERO)和(SPAN)键5秒钟以上,便可开锁(LCD
屏幕显示:OPEN)
2、按键调零:对变送器施加零点压力,按下两秒钟,变送器输出4.000mA电
流,完成调零操作(LCD显示:LSET)。
3、按键调满:对变送器施加满点压力,按下(SPAN)键2秒钟,变送器输出20.000
电流,完成调满操作(LCD屏幕显示:HSET)。
4、如果两分钟之内没有任何操作,变送器按键会自动锁住。
若要操作,需重新
开锁
5、数据恢复功能:先按住(ZERO)键,然后接通变送器电源,五秒钟后LCD
显示OK,放开(ZERO)键即可。
变送器日常维护
1、变送器每运行半年或一年后,应对其基本性能作一次检查,如有必要时,对
变送器的零位每月进行一次检查
2、连接变送器的导压管和隔离液应分期检查或清洗
3、变送器的正、付压力容室也应定期进行吹洗,以免赃物堵塞影响性能。
mk电调说明书
mk电调说明书篇一:电调设置选项说明书电调设置选项说明书45A/50A/60A/70A/80A/100A/125A/200A·如何进入选项设置模式:1. 把马达和电调,以及接收机相互之间的连线全部接好,不过注意先不要连接电池和电调的电源线。
2. 打开遥控器,并把油门杆位拨到最高(满油门)。
(注意:大部分Futaba遥控器的油门杆位是反向的。
)3. 联接电调与电池的电源线,电调上电,并控制马达并发出一些带节奏的鸣叫。
·如何操作选项设置:进入选项设置模式后,马达会发出一些有特定规律的鸣叫:一个升调的短音乐之后接一个或多个短鸣响。
这些声音是电调程序当前选项的提示音,每个提示音会重复3次之后变换为下一个主选项,在声音结束之前都可以进行命令(油门杆位拨动)的输入。
主选项菜单是循环的,如果错过了,可以等提示音再次到达,只是要花一些时间而已。
主选项提示声的含义如下表:表1.1提示音提示音含意短音乐+ 1短高?—主选项一:电池类型及电池数量鸣短音乐+ 2短高?——主选项二:油门相关设置鸣主选项三:刹车(标准固定翼版短音乐+ 3短高?———本电调)鸣 /操作模式(电直版本电调)短音乐+ 4短高?————主选项四:方向及保护模式鸣?————短音乐+ 5短高主选项五:PWM设置—鸣第一步,选择主选项并进入子选项菜单。
如表1.1,当听到需要设置的主选项提示音出现时,因为提示音是重复3次的,建议第一次听到则留意,第二次听到则复核并进行选择操作:拨动油门杆位到中间位置,此表示选择当前主选项并进入子选项菜单。
因为已经进入第二层菜单,现在马达发出的声音会有一些变化以区别主选项菜单,升调短音乐改为短高鸣提示当前为第几主选项,主选项的短高鸣改为长低鸣提示当前为第几子选项(提示主选项的一个或多个短高鸣+提示子选项的一个或多个长低鸣)。
详细含义可以查第二页和第三页的子选项列表。
每个子选项提示音也是重复3次然后变成下一子选项并循环。
Endress+Hauser FieldCare SFE500 通用现场设备调试软件操作手册说明书
Products Solutions Services操作手册FieldCare SFE500通用现场设备调试软件,适用于HART、PROFIBUS、基金会现场总线(FF)、Modbus、IO-Link、Ethernet/IP和PROFINETBA00065S/28/ZH/11.20715224472020-10-23变更历史FieldCare SFE500变更历史2Endress+HauserFieldCare SFE500目录Endress+Hauser 3目录1文档信息 (4)1.1文档功能 (4)1.2信息图标 (4)1.2.1安全图标 (4)1.2.2特定信息图标 (4)1.2.3FieldCare 信息图标 (5)1.3文本重点 (6)1.4使用的首字母缩略词 (6)1.5文档资料 (6)1.6注册商标 (7)2基本安全指南 (8)2.1人员要求 (8)2.2指定用途 (8)2.3产品安全 (8)2.4IT 安全 (9)3产品描述 (10)3.1软件功能 (10)3.1.1软件许可证管理(SLM) (10)3.1.2用户角色 (10)3.2应用 (11)4安装 (12)5操作 (13)5.1启动FieldCare。
(13)5.2链接FieldCare 到W@M Portal。
(13)5.2.1在FieldCare 中进行设置。
(13)5.2.2在FieldCare Administration 中进行设置。
(14)5.2.3在W@M Portal 中集成心跳校验 (17)5.3用户界面 (18)5.4常规设置 (18)5.4.1项目设置 (18)5.4.2扫描设置 (18)5.4.3工厂视图 (19)5.4.4网络视图 (21)5.5常规功能 (21)5.6验证网络 (21)6系统集成 (23)6.1设置IP 地址 (23)6.2Windows 防火墙 (23)7操作 (25)7.1设置显示语言 (25)7.2创建项目 (25)7.3保存项目 (26)7.4打开保存的项目 (27)7.5CSV 导出和导入 (27)7.6DTM 信息...........................277.7显示DTM 目录.......................287.8更新DTM 目录.......................288诊断和故障排除...................298.1常规故障排除........................299软件更新.. (30)文档信息FieldCare SFE5001 文档信息1.1 文档功能《操作手册》包含使用软件所需的所有信息:从产品标识、安装和使用,至系统集成、操作、诊断和故障排除,以及软件更新和废弃。
DME4000,5000-快速指引
DME4000 /DME5000快速快速指引指引(产品图片)目录目录 (2)1.DME4/5 Profibus接口 (3)2.DME4/5 RS422接口 (8)3.DME SSI接口 (10)接口1. DME4/5 Profibus接口电气接口1.1电气接口DME4000-xx2, DME5000-xx2接线注解1.2接线注解带有屏蔽功能的双绞线保证了数据传输的可靠性。
电气连接要按照标准接屏蔽并可靠接地。
尽可能远离强干扰源,例如变频器电缆的出口,电焊机的电源,动力电缆等等。
Profibus 终端连接1.3 部分参数设定Profibus接口的传感器均可以通过显示屏进行参数设定。
当进行Profibus组态后,储存在控制器中的参数可以被覆盖。
但是,Profibus 地址,在激活preset 功能下的offset及Profile Class 1 不能通过控制器中参数的修改来覆盖。
1.4 Profibus Profile介绍在传感器中有两种Profile,一种是Encode Profile,另外一种是SICK Profile。
建议:在Profibus 组态时,选用SICK Profile,Class2。
该Profile 具有以下优点:4byte input中包含测量值和诊断信息4byte output中包含Preset功能和Laser ON/OFF功能无扩展的诊断功能1.5 Profibus缺省地址Bus Address通过显示屏进行设定,范围为001-125,缺省设置是0061.6 Preset 功能激活方式1)通过MF1在显示屏上进行设定设置MF1 输入作为preset输入,输入要求的preset值把小车停在preset的位置上激活MF1,例如,接近开关或者光电开关DME4000, DME5000在此位置的输出等于设置的preset值2)通过控制器master to slave的功能实现在output 中激活preset mode在output 中输入preset value注:preset值是用2n 补码来计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章参数设置1.1 参数设置举例1.2 参数清单第二章快、慢车调试2.1 慢车调试2.1 快车调试第一章参数设置1.1 参数设置举例1. Basis 基本参数设置菜单Main menue : basis 基本参数设置菜单Parameter-level: inside 允许进入等级Cabin module : 2 轿厢模块数量Addition module: 6 外呼模块数量Amount of cars: single lift 群控电梯台数Stops: 16 停站层数Ground floor: 1 基站在哪层Identity: ------- 标识2. Shaft-copying 井道信息参数设置菜单MAIN MENUE: Shaft-copying 井道信息参数设置菜单Shaft-copying: digital 数字井道信息2.1 Manual input 主输入2.2 DSE-correction 修正参数菜单2.3 Learn shaft 井道学习2.4 Learn floor 层楼学习2.5 Pulse generator 旋转编码器参数菜单2.6 Option 操作选项2.7 DSE-copy 井道拷贝2.8 DSE-END 井道拷贝结束2.1 DSE-copy: Manual input 手动输入DSE-manual-input: LHC 下端站Lower-HC at: 0 下端站所在位置DSE-manual-input: UHC 上端站Upper-HC at: 38880 上端站所在位置DSE-manual-input: Ways 减速距离E1.Stop distance: 40 爬行速度减速距离Inching precision: 10 再平层时精度Vi-distance: 20 检修速度减速距离V1-distance: 300 校正速度的减速距离V2-distance: 1500 单层速度的减速距离V3-distance: 2500 双层速度的减速距离V4-distance: 3000 三层速度的减速距离Vmax-distance: 3500 最大速度的减速距离Door zone: 80 门区长度DSE-manual-input: Floors 层楼1. Stop position: 4000 1层停层位置2. Stop position: 8000 2层停层位置3. Stop position: 12000 3层停层位置4. Stop position: 16000 4层停层位置5. Stop position: 20000 5层停层位置6. Stop position: 24000 6层停层位置7. Stop position: 28000 7层停层位置┋16. Stop position: 640000 16层停层位置DSE-manual-input: Stop compensation 停层校正Stop compensation: 0DSE-manual-input: End manual input 主输入结束2.2 DSE-manual-input: Correction 修正参数菜单DSE-Correction: Ways 修正距离E1.Stop distance: 0 爬行速度的减速距离修正Inching distance: 0 再平层精度修正Vi-distance: 0 检修速度的减速距离修正V1-distance: 0 校正速度的减速距离修正V2-distance: 0 单层速度的减速距离修正V3-distance: 0 双层速度的减速距离修正V4-distance: 0 三层速度的减速距离修正Vmax-distance: 0 最大速度的减速距离修正Door zone: 0 门区长度修正DSE-manual-input: Floors 层楼修正1. Stop position: 0 1层停层位置修正2. Stop position: 0 2层停层位置修正3. Stop position: 0 3层停层位置修正4. Stop position: 0 4层停层位置修正5. Stop position: 0 5层停层位置修正6. Stop position: 0 6层停层位置修正┋16. Stop position: 0 16层停层位置修正DSE-correction: LHC 下端站所在位置修正Lower-HC at : 0DSE-correction: UHC 上端站所在位置修正Upper-HC at: 0DSE-correction: Stop compensation 停止校正距离修正Stop compensation: 0DSE-correction: Linear stretching 钢丝绳拉伸长度修正Stretch: 0DSE-correction: End correction 修正结束2.3. DSE-menue: Learn shaft 井道学习E1.Stop distance: 40 爬行速度的减速距离Vmax-distance: 3000 最大速度的减速距离Lowest stop at: 0 最底层停在位置Learning active 井道学习激活2.4 DSE menue: Learn floors 层楼学习Door zone: 80 门区Learning active 层楼学习激活2.5 DSE- menue: Pulse generator 旋编参数菜单DSE-pulse no: 125 旋编脉冲数DSE-diameter pulley: 293 旋编直径DSE-gearing: 1旋编的变比DSE-constant=0.1839mm/puls2.6 DSE-menue: optionwith-FUC-pulse: yes 使用“FHC”检测Way of acceleration: consider additionaly 加速方式2.7 DSE-menue: Copy 拷贝DSE-copy: securing all2.8 DSE-menue DSE-end 终止井道菜单3. Drive 驱动参数菜单设置Main menue: Drive 驱动参数菜单Inching: no 再平层Reset-mode: Standard 复位模式Start-tries: 3 启动次数Trip time: 5 未收到信号的运行时间Pause for restart: 2 重启动间隔时间Serial regulator: no 串行通讯控制方式Prelim-run-up: 0 优先上运行Prelim-run-down: 0 优先下运行Castor-run-up: 0 滞后上运行Castor-run-down: 0 滞后下运行Freedrive: 0 自由驱动SK0-check-mode: no SK0检测模式Re-levelling-speed: Vi 控制柜检修速度Soft-stop-re-levelling: 1.5 控制柜检修速度延迟停止时间Code speed: no 速度控制码SIS-check: no 门区检测SK2-check: no 门锁检测Overdrive protection: On top and bottom 上、下限保护4. Doors 门参数菜单设置Main menue: doors 门参数菜单Amount of doors: 1 轿门个数Door opening: if stopped 停车开门Opening retard: 0 开门延迟Interlock time: 0.2 互锁时间Unlock time: 0.2 解锁时间Closing attempts: 6 关门次数Thronging: no 通过时间Forced closing: no 强制关门Resting time: 3 首次开门后多长时间关门Opening time: 6 开门时间Closing time: 6 关门时间New resting time: 1 二次开门后多长时间关门Reversing pause: 0.2 挡光幕后的开门延迟One door global: yes 只有一个门Door-parking position: closed 到基站门的状态Limit-switch-mode: standard 开关限位模式Light-bar.-enable: standard(always) 光幕有效方式5. In-/outputs 输入及输出参数Main menue In-/output 输入及输出参数E1 : 脉冲A相数字脉冲A相E2 : 脉冲B相数字脉冲B相E3: FHC 层楼确认E4: LHC 下端站校正E5: UHC 上端站校正E6: Shut off 锁梯输入E7: Inspection-on 检修信号E8: Inspection-up 检修上行E9: Inspection-down 检修下行E10: Firemen-hall-1 消防开关E11: Limit switch open D1 开门到位E12: Limit switch closed D1 关门到位E13: no functionE14: no functionE15: no functionE16: no functionA1: Door-open D1 开门输出A2: Door-closed D1 关门输出A3: V-inspection 检修速度A4: Approaching 爬行速度A5: UP 上方向输出A6: DOWN 下方向输出A8: V1 中速输出A9: Vmax 最大速度输出21: SK2-check 门锁检测22: Drive is off 驱动停止23: Drive check 驱动检测24: Light-bar 光幕输入25: Lift driver 司机输入26: Full load 满载输入27: Overload2 超载输入28: no function 未定义31: no function 未定义32: no function 未定义33: no function 未定义34: no function 未定义35: no function 未定义36: Overload indication 超载输出指示37: Cabin gong 到站钟输出38: Out of order 锁梯输出41: Position BIN P1 层显二进制码1 42: Position BIN P2 层显二进制码2 43: Position BIN P3 层显二进制码3 44: Position BIN P4 层显二进制码445: Position BIN P5 层显二进制码546: Position BIN P6 层显二进制码647: Next, dir-E-Up 上方向指示48: Next, dir-E-Down 下方向指示轿厢及厅外串行模块参数设置A1.1: Open-door-but 开门按钮A1.2: Close-door-but 关门按钮A1.3: Call-Car-D1-S1 1层内选A1.4: Call-Car-D1-S2 2层内选A1.5: Call-Car-D1-S3 3层内选A1.6: Call-Car-D1-S4 4层内选A1.7: Call-Car-D1-S5 5层内选A1.8: Call-Car-D1-S6 6层内选A2.1: Call-up-D1-S1 1层上召A2.2: no function 未定义A2.3: Call-up-D1-S2 2层上召A2.4: Call-dpwn-D1-S2 2层下召A2.5: Call-up-D1-S3 3层上召A2.6: Call-down-D1-S3 3层下召A2.7: Call-up-D1-S4 4层上召A2.8: Call-down-D1-S4 4层下召A3.1: Call-up-D1-S5 5层上召A3.2: Call-down-D1-S5 5层下召A3.3: no function 未定义A3.4: Call-down-D1-S6 6层下召A3.5: no function 未定义A3.6: no function 未定义A3.7: no function 未定义A3.8: no function 未定义以上是以6层/6站为例.6. Indications 层显参数菜单设置Main menue: Indications 显示参数菜单Indication-basis: 1 基本层显从哪一层开始Free indications: no 自由码显示Gong-retardation: 0.50 到站钟延时Gong-length: 4 到站钟时间Sparkle-time: 2s 闪动间隔时间7. Special function 特殊功能菜单设置Main menue: Special function 特殊功能Thermal shut-off1: after 10s 热保护1关机Thermal shut-off2: no 热保护2关机Firemen ride: mode3(china) 消防运行(中国)Firemen availability: 10 消防有效时间Firemen halls: 1 消防开关Firemen hall 1: 1 消防基站Shut-off: fast 锁梯方式Shut-off-stop: 1 锁梯基站Evacuation: no 紧急运行Parking travel: no 泊梯运行Lowering travel: no 返底层Warm-up-operation: no 预热运行Lift-drive-function: yes 司机功能Light bar stop: no 光幕停梯Centre/tendency service: off 流量评估Pref.-availability: 5 优先时间Group-function: standard 群控功能Reversing because of call: only one lift 因指令反向Prevent misuse(car call): no 防捣乱(内选)Prevent misuse(hall call): no 防捣乱(外呼)Open door force: no 强迫开门Inspection mode: standard 检修方式Handicap-calls: no 密码呼梯Addition stay time: 1 附加停留时间While power down hold: memory and position 掉电保持Start-blocking: no 群控分配停顿Load-time-operation: no 开门保持按钮Standby-operation: no 待机自动输出Special-software: no 特殊软件Tesim-mode: standard-9600 调制解调器Tesim-number: 1 调制解调器数量8. Password-protect 密码保护菜单设置Main menue: password-protect 密码保护菜单Password protection: no 密码Data check: no 数据检查Data repair: no 数据修复9. Test and end 测试结束Main menue: Test and end 测试结束Please wait! 请等一等!Test of parameters 测试参数Close writing-protection 关闭写保护开关注: 1. 写参数前,必须断开“S2”开关.2. 参数修改完成后必须进入到最后一项菜单“TEST AND END”, 以使所设置的参数写入到EEPROM中.当屏幕出现“Cl ose writing-protection”后,闭合“S2”开关.1.1 EKM65参数清单Main menue 主菜单一. Basis 基本菜单1. Paramet.-level 参数级别: inside(standard标准, insider内部)2. Cabin module 轿厢模块:0(0)3. Addition module 外呼模块: 8(0,1,2, (64)4. Amount of cars电梯数量:single(single单梯,duplex双梯,triplex三梯,4-plex四梯,…,8-plex八梯)5. Stops 站数:12(1,2,…)A. Group no. 群控梯号:B. Lowest stop最低层站:C. Highest stop最高层站:D. Highest group stop群控最高层站:6. Ground floor基站: 1(1, 2, …)7. Identity识别号二. Shaft-copying井道定位定位方式:digital(DSE)(1.standard1标准1, 2. standard2标准2, 3. digital(DSE)脉冲计数, 4. free progFPC64自由编程)1. Standard1标准12. Standard2标准23. DSE脉冲计数3.1 Manual input人工输入3.2 Correction校正3.3 Learn shaft学习井道3.4 Learn floors学习层站3.5 Pulse generator编码器设置3.6 Options选项3.7 Copy拷贝3.8 DSE-end结束3.1 DSE-manual-input: DSE-人工输入3.1.1. LHC下校正3.1.2. UHC上校正3.1.3. Ways减速距离3.1.4. Floors楼层位置3.1.5. Stop compensation平层调整3.1.6. End manual input结束人工输入3.1.3. Ways 减速距离E1.Stop distance电气停车距离:0mm(+–) Inching precision反平层精度: 0mm(+-)Vi-distance Vi-减速距离: 0mmV1-distance V1-减速距离: 0mmV2-distance V2-减速距离: 0mmV3-distance V3-减速距离: 0mmV4-distance V4-减速距离: 0mmVmax-distance Vmax-减速距离: 0mmDoor zone 门区距离: 0mm(+-)3.1.4. Floors 楼层位置1.Stop position 1站位置: 0mm2.2. Stop position 2站位置: 0mm3. Stop position 3站位置: 0mm4. Stop position 4站位置: 0mm5. Stop position 5站位置: 0mm6. Stop position 6站位置: 0mm7. Stop position 7站位置: 0mm8. Stop position 8站位置: 0mm……N. Stop position n站位置: 0mm3.1.5. Stop compensation 停层补偿: 0mm3.1.6. End manual input 结束人工输入3.2 Correction校正, DSE-correction DSE校正3.2.1. LHC下校正3.2.2.UHC上校正3.2.3.Ways减速距离3.2.4.Floors层楼位置3.2.5.Stop compensation平层调整3.2.6.End manual input 结束人工输入3.2.1. LHC下校正 Lower-HC at下校正开关位置: 0mm=0 3.2.2. UHC上校正 Upper-HC at上校正开关位置: 0mm=0 3.2.3. Ways减速距离E1.Stop distance电气停车距离:0mm(+-)=0Inching precision反平层精度: 0mm(+-)=0Vi-distance Vi-减速距离: 0mm=0V1-distance V1-减速距离: 0mm=0V2-distance V2-减速距离: 0mm=0V3-distance V3-减速距离: 0mm=0V4-distance V4-减速距离: 0mm=0Vmax-distance Vmax-减速距离: 0mm=0Door zone 门区距离: 0mm(+-)=03.2.4. Floors 楼层位置1. Stop position 1站位置:0mm=02. Stop position 2站位置:0mm=03. Stop position 3站位置: 0mm=04. Stop position 4站位置:0mm=05. Stop position 5站位置:0mm=06. Stop position 6站位置:0mm=07. Stop position 7站位置:0mm=08. Stop position 8站位置:0mm=0……N. Stop position n站位置:0mm=03.2.5. Stop compensation 停层补偿:0mm=03.2.6. Linear stretching 线性伸缩:0mm,3.2.7. End correction 结束校正3.3. Learn shaft 学习井道E1.Stop distance 电气停车距离:0mm(+-)Vmax-distance Vmax减速距离:0mmLowest stop at 最底站位置:0mmTake-over learning 写入学习数据Repeat重复Brake中断退出3.4. Learn floors学习层站3.5. Pulse generator编码器设置3.5.1. DSE-pulse no.编码器脉冲数:×××(100…500ppr) 3.5.2 DSE-diameter定位轮直径: ×××(50…1000mm)3.5.3 DSE-gearing齿轮倍数:1(1,…)→DSE-constant定位精度=×××mm/pulse3.6. Options选项.3.6.1. With FHC pulse带有FHC层站校正信号:yes(no无,yes有,yes-mode2) 3.6.2. Way of acceleration加速过程:consider additionaly附加预停(passive被动,consider additionaly附加预停)3.6.3. HC-lost-protection HC信号丢失保护:no(no无,yes有)3.7. Copy拷贝3.7.1. Securing all存盘3.7.2. re-load copy读出3.7.3. erase all删除3.8. DSE-end结束4. Free prog(FPC64) yes是(no无,yes有)自由编程64Insert c-point 增加井道信息点c-points-list: 井道信息清单1. Door zone门区2. Pulse-down下换速3. Pulse-up上换速4. Pulse-v1-down V-1下换速5. Pulse-v1-up V-1上换速6. Pulse-v2-down V-2下换速7. Pulse-v2-up V-2上换速8. Pulse-v3-down V-3下换速9. Pulse-v3-up V-3上换速10. Upper-correction上端站校正11. Lower-correction下端站校正Size of c-list井道信息点Delete c-list删除井道信息点Clear all全部清除Quit FPC64退出自由编程三. Drive驱动控制1. Inching反平层:closed关门(no无,open开,closed关)2. Inching-force强制反平层:no无(no无,yes是)3. reset-mode复位模式:standard标准(standard标准,downward向下,upward 向上)4. Start-tries试启动次数: 5(1,2,…,)5. Trip time启动监测时间: 10s(1s,…40s)6. Pause for restart再启动暂停时间:1s(…)7. Serial regulator串行控制:no无(no无,yes是)8. Prelim-run-up向上预备:0s(…)9. Prelim-run-down向下预备:0s(…)10. Castor-run-up 向上延迟:0s(…)11. Castor-run-down向下延迟:0s(…)12. Freedrive 自由驱动:1(mount)(1,2,3,4)Freedr.-ref-1自由驱动信号 traveling运行(up上行,down下行,main主接触器,floor travel单层,traveling运行,fast快车,slow慢车,apporaching爬行,inching反平层,V-max最大速度,V-inspection检修速度,V1第一速度,V2第二速度,V3第三速度,V4第四速度,)Freedr.-retar-1 开始延迟 0.5sFreedr.-cast-1 最后延迟 0.5s13. SK0-check-mode SK0信号检查模式 no(use separate sk0使用单独的sk0, use sk1 as sk0使用sk1作为sk0, no无)14. re-levelling-speed再平层速度:vi(v0,vi,v1,v2)15. Soft-stop-re-levelling再平层软停止:0s(0-5.0s)16. Code speed速度编码:yes(no无,yes有)Code for v-inch: 反平层速度编码 00hexCode for v-apr: 爬行速度编码 00hexCode for v-inspe: 检修速度编码 00hexCode for v-1: v-1速度编码 00hexCode for v-2: v-2速度编码 00hexCode for v-3: v-3速度编码 00hexCode for v-4: v-4速度编码 00hexCode for v-max: v-max速度编码 00hex17. SIS-check 安全模块SIS检测: simple单级(no无,simple单级,double双级)18. SK2-check门锁SK2检查:simple单级(no无,simple单级,double双级)19. Overdrive protection过载保护: on top and bottom 在顶部和底部(no 无,on top and bottom在顶部和底部)四. Doors门参数1. Amount of doors门数: 2(1,2)2. Load through贯通门控制: yes有(yes有,no(level1)无,no无(level2),no 无(neither))3. Door opening 开门区域: if stopped停止(if stopped停止,in door zone门区内,in flush平层区)4. Opening retard开门延时:0s(…)5. Interlock time锁定时间:0.4s(…)6. unlock time解锁时间:0s(…)7. Closing attempts试关门次数:6(…)8. Thronging触板时间:no无(no无,…,after 20s 20s后)9. Forced closing强迫关门前试关次数:no无(…,after 3 tries 3次后)10. Resting time开门等待时间:8s(…)11. Opening time开门时间:5s(…)12. Closing time关门时间:5s(…)13. Forced closing time强迫关门时间:7s(…)14. New resting time开门后再关门等待时间:3s(…)15. Reversing pause反转停顿时间:0s(…)16. one door global单门/双门是否各层相同:yes是(yes是,no不)17. Door-parking position泊梯门状态:closed关门(closed关门,open开门,last open最后开门)18. Limit-switch-mode限位开关方式:standard标准(standard标准,No pressing检修时不关门)19. Light-barr-enable安全触板有效区域:only with FHC只在FHC校正开关区域20. (standard(always)标准(一直),only with FHC只在FHC校正开关区间,only in door zone只在门区,only open with FHC只在FHC校正开关区域打开,only open in door zone只在门区打开)五. in-/outputs输入/输出??changeI/O改变I/O:(no无,yes是)input/output1. single单一定义E1=pulse A编码器A相E2=pulse B编码器B相E3=FHC层楼校正信号E4=LHC下端站校正信号E5=UHC上端站校正信号E6=shut off 锁梯信号E7=inspection on(INV)检修信号E8=inspection up检修上行E9=inspection down检修下行E10=firemen-hall-1消防开关E11=limit switch open D1开门到位E12=limit switch closed D1关门到位E13=no function无定义E14=no function无定义E15=no function无定义E16=no function无定义A1=door-open D1开门输出A2=door-close D1关门输出A3=approaching爬行速度输出A4=traveling运行信号输出A5=up上行输出A6=down下行输出A8=v-inspection检修速度输出A9=Vmax最大速度输出21=SK2 check门锁检查22=drive is off驱动停止23=drive check抱闸检查24=light barrier光幕输入25=lift driver司机输入26=fullload满载输入27=overload2超载输入28=open-door but开门按钮31=close-door but关门按钮32=no function未定义33=no function未定义34=no function未定义35=no function未定义36=cabin gong到站钟输出37=overload indication超载输出38=out of order锁梯输出41=posit,BIN,P1层显二进制-142=posit,BIN,P2层显二进制-243=posit,BIN,P3层显二进制-344=posit,BIN,P4层显二进制-445=posit,BIN,P5层显二进制-546=posit,BIN,P6层显二进制-647=next,dir-E-up上方向灯48=next,dir-E-down下方向灯....1. Multiple重复定义2. Modular模块定义3. Standard-I/O标准I/O4. Inverse logic反逻辑5. End I/O结束六. Indications状态指示1. Indication-basis显示基数:1(…)2. Free indications自由方式:yes是(no无,yes是) 2.1. At stop 1 第1站: 0008hex2.2. At stop 2 第2站: 000Bhex2.3. At stop 3 第3站: 003Ahex2.4. At stop4 第4站: 0012hex2.5. At stop5 第5站: 006Bhex2.6. At stop6 第6站: 006Dhex2.7. At stop7 第7站: 0005hex2.8. At stop8 第8站: 003Fhex……3. Gong-retardation 到站钟延时:0s(…)4. Gong-length报站时间:5s(…)5. Sparkle-time检修时层显闪动时间:1s(…)七.Special function特殊功能1. Thermal shut-off1 过热1锁梯延迟(秒):no无,at once after 10s每次10s 后(0,1, (60)2. Thermal shut-off2过热2停梯延迟(秒): no无,at once after 10s每次10s 后(0,1, (60)3. Firemen ride消防运行:mode3(china)方式3(NEIN无,standard标准,mode1方式1,mode2方式2,mode3(china)方式3)3.1. Firemen. availability 消防有效时间:10s(10,15,…)3.2. Firemen halls消防目的层个数:1(0,1,2,3,4,…)3.3. Firemen hall 1消防第1停站:1(1,2,…)4. Shut-off锁梯运行:standard标准方式(standard标准方式,fast快速,with open doors开门关梯,no无)4.1. Shut-off-stop锁梯层站:1(1,2,…)5. Evacuation应急运行:to next stop到最近层站(none无,to next stop到最近层站,to fix aim到指定层站)6. Parking travel泊梯运行:simple简单(no无,simple简单,dynamic动态,several aims几个目标,tesim-parking clock远程停梯时钟)Parking aims停梯目的层数:1(amount)Parking aims停梯目的层:1Park-tolerancy:0(anzahl hal)Park time泊梯时间:60s7. Lowering travel返底层:no无(no无,yes是)7.1 Lowering time返底层时间:1min-120min8. Warm-up-operation过热操作:no无(no无,yes是)Warm-up-cycle过热操作周期:15min-120min9. Lift-driver-function司机运行:no无(no无,yes是)10. Light barr.stop触板停梯:no无(no无,yes是)11. Centre/tendency service流量评估:off关(off关,standard标准,variable 变量)12. Pref-availability优先时间:30s(5, (120)13. Group function群控功能:standard标准(standard标准,power-save节能,aim-insisting固定目的层,aim-flexible快速目的层,variable变量)14. Reversing because of call因指令反转:at once and all立即(at once andall立即,no reversing无反转,only one lift仅一台梯)15. Prevent misuse(car call)防捣乱(轿内):yes是(no无,yes是)Misuse limit捣乱限定:2calls两个指令16. Prevent misuse(hall call)防捣乱(厅外):standard标准(in a sector在某一区域,standard标准,no无)17. Highest stop of sector区域最高站:**(1-64)18. Lowest stop of sector 区域最低站:**(1-**)19. Call cancel mode指令取消方式:---(first call stays第一个指令保持,hard blocking硬锁定,cancel both calls取消两种指令,call to ground stays保持到基站指令)20. Call input pause指令输入暂停时间:*(0-10s)21. Open door force强迫开门:no无(no无,yes是)22. Inspection mode检修方式:standard标准(standard标准,close door关门,light-barr触板,HITACHI日立)23. Handicap-calls加密指令:1-wire-mode一线式(no无,1-wire-mode一线式,start-sign-mode起始符号式,sparkle-mode指令闪烁式,standard标准) 23.1 Handicap-types密码类型:*2(1-4)23.2 Handicap type 1 密码类型1:*(car轿厢指令,spec8特殊指令8,spec7特殊指令7,…,spec1特殊指令1,min群控低域,max群控高域,pref.g群控优先,pref.s单梯优先,down下指令,up上指令,simple简单无集选指令) Handicap type 1 密码类型1:door1门1(door1门1,door2门2)23.3. Handicap timeout密码有效时间:*(1-10s)23.4. Handicap limit密码范围:*(2-20)23.5. handicap-limit-mode密码范围方式:*(simple简单,exactly amount准确数量)24. addition stay time附加停顿时间:0(…)25. while power down hold断电时:nothing无(nothing无,position位置)26. start-blocking群控分配停顿:no无(no无,standard标准)26.1 start-blocking-time停顿时间:0-12s27. Load-time operation开门保持按钮:no无(no无,yes有)27.1 Load-time保持时间:0-240s28. Standby-operation待机输出:simple简单(no无,simple简单,double双重)28.1 Standby-time1时间间隔1:0-60s29. Special-software特殊软件:yes有(no无,yes有)30. Amount-spec-parameter特殊参数数量:1-8个30.1. Spec.-parameter-1特殊参数1: 130.2. Spec.-parameter-2特殊参数2: 030.3. Spec.-parameter-3特殊参数3: 031. Tesim-mode TESIM通讯方式:standard-9600标准9600(standard-9600标准9600,modem-2400调制解调2400)31.1. Tesim-number TESIM序列号:***八.Password-protect:密码保护32.Password protection密码保护:no无(no无,one password一个密码,master-password主密码)1. Data check数据检查:no无(no无,error message only仅仅错误信息,stop on error错误停止)2. Data repair数据修复:no无(no无,yes是)九.Test and end测试结束functions1. Calls呼梯指令Call type sel?指令类型选择car轿厢Call-car-Dn sel ?轿厢召唤门选择door1门1Call-car-D1-S××(1-n)门1SXX站内呼指令-S1 up to SXX?哪一层站?(1-n)1simple非集选呼梯指令..simple-D1-SXX?非集选门1SXX站指令?(1-n)..-S1 up to SXX?哪一层站?(1-n)up:上向Call-up-D1-SXX?门1SXX站上召指令?(1-n)..-S1 up to SXX?上召哪一层站(1-n)down:下向call-down-D1-SXX?门1下召哪一层站?(1-n)Pref.S:优先呼梯指令-PrefS-D1-SXX?(1-n)-S1 up to SXX?(1-n)Pref.g:-Prefg-D1-SXX?(1-)-S1 up to SXX?(1-n)max:call-max-D1-SXX?(1-n)-S1 up to SXX?(1-n)min:call-min-D1-SXX?(1-n)-S1 up to SXX?(1-n)Special-call:特殊呼梯Spec.-call-type:(1-8)Spec.-call-stop:(1-64)Handicap-call:密码呼梯Handicap type : input, output,uni(1-wire)Handicap type input(1-4)Handicap stop at:handic.1-in-H2(1-64)2. Indications状态指示Indicator sel.Position:位置楼层1to1 1对1码BCD BCD码GRAY 格雷码BIN 二进制码FREEI自由码No position 无位置楼层Pos.-indicator?1to1:Posit.1to1 SXX?(1-n)1..F1 up to SXX?(1-N)Aim:目的楼层Aim-indicator目的楼层指示1to 1 1对1码BCD BCD 码GRAY格雷码BIN二进制码FREI自由码N0 aim 无目的层Cabin gong:轿厢钟Indicator sel.指示选择Floor gong-FXX层站钟(1-7)Next dir. up-FXX FXX站下次上方向Next dir. down-FXX FXX站下次上方向Next direction 下次运行方向Dir.-indic. type?指示类型选择(A-E)…-A-direction?up,down.State output状态输出:general fault一般故障,trip-time-fault时间超出故障,door fault门故障,special service特殊服务,preference call优先呼梯,drive-temperat驱动器温度,full ready完全准备,flush indication平层指示)3. Drive驱动控制Drive-I/O-choice驱动输入输出选择output输出:up上,down下,main主接触器,floor travel单层运行,travelling 运行信号,fast快车,slow慢车,approaching爬行,inching反平层,slow+castor 慢车延迟,V-max最大速度,V-inspection检修速度,V-1速度V1,V-2速度V2,V-3速度V3,V-4速度V4,Free-drive自由驱动,coded-drive编码驱动input输入:drive is off驱动停止,drive check驱动检查,sis-check SIS检查,sis-2nd-check第二个SIS检查,sk2-check 门锁检查,sk2-2nd-check双向门锁检查,sk0-check-point SKO检查点,shaft-door-check厅门锁检查4. door门系统door-I/O-choice门输入输出参数选择output输出:door-close关门输出,door-open开门输出,thronging,locking,perm.open-door,perm.close-door,input输入:light barrier光幕,close-door but.关门按钮,hard close-door but.硬关门按钮,limit switch closed关门限位,open-door but.开门按钮,limit switch opened开门限位,shaft door open,open-door-lock,sparing open-door but.5. special function特殊功能output输出:out of order锁梯输出evacuat.activ应急运行firemen ready消防反馈standby-1待机输出1standby-2待机输出2transfer指令传送special特殊功能INPUT输入Special-input-1特殊输入1Firemen-hall厅外消防开关Firemen-car轿厢消防开关Parking travel泊梯运行Shut-off锁梯开关Evacuation应急信号Travel-lock运行锁定Warm-up travel加热运行Light barrier stop触板停梯Lift driver司机运行Evacuation-lock应急锁定Transfer信号传输Special特殊输入Special-input-2特殊输入2Start-blocking群控停顿Evac.-exceptionLoad time button开门保持按钮6. insp./re-levelling检修和再平层inspection-on检修开关inspection-up检修上行inspection-down检修下行re-level.-on再平层信号re-level.-up再平层上行re-level.-down再平层下行insp/re-lev-up检修/再平层上行insp/re-lev-down检修/再平层下行i/r-slow检修/再平层慢速reset-button复位按钮7. shaft-copying井道定位pulse换速信号pulse-up上换速pulse-down下换速correction校正信号lower correction下校正upper correction上校正flush平层信号lower flush下平层信号upper flush上平层信号electrical stop电气停车door-zone门区信号short-travel-pulse短程脉冲vorkowektur8. call contr./load detect.,特殊呼梯指令控制call control呼梯控制full load满载hall call lock独立服务call lock呼梯锁定simplex order单梯呼指令en81-overload EN81超载overload-2超载2overload-indication超载指示overload超载9. EKM16-INPUTS,EKM16-输入EKM16-EXX SEL.E(1-16)..to EKM16-ExxE(1-16)10. no function无功能第二章快、慢车调试2.1 慢车调试慢车的调试,是指电梯在没有运行快车之前,以检修速度运行.慢车调试条件:1. 变频器参数已输入,完整无误.2. 电脑参数已输入,正确无误.3. 安全回路,门锁回路正常.4. 电脑指示在检修位置.此时给出上或下指令,电脑将输出上或下方向,检修速度;电动机将按给定的指令运转.2.2. 快车调试在电梯运行快车之前,必须进行井道自学习,只有进行井道学习完毕方可进行快车运行.所谓井道学习是指电梯首次运行前,EKM6X系统对电梯的井道内的设施、开关位置进行学习的过程.井道学习方法:步骤一:将电梯置于检修位置,慢车运行直最高平层位置;步骤二:保持电梯检修状态,断开电脑CPU板上的S2开关,进入以菜单:Main menue: shaft-copyingShaft-copying: digital(DSE64)DSE65-menue: learn shaft井道学习E1.stop distance: 40 爬行速度时的减速距离Vmax-distance: 2500( ) 最大速度时的减速距离Lower stop at : 0 最低层停在位置Learning active: 井道学习激活按确认键,出现如下字母:Test and end按确认键,Parameter.-okClose writing-protection以上菜单确认后,合上S2开关.步骤三:将电梯由检修状态转变为正常,电梯将自动进行井道学习.其过程为:电梯将以Vmax的实际设置值,由最高层门区位置向下运行,越过上强迫换速点后减速停车,然后在向上运行,越过上强迫换速点减速,直到最高层门区停车(认识上端站的过程);然后电梯再向下运行,一直到下强迫换速点后减速,直到最底层门区停车,然后电梯再向上运行,越过下强迫减速点减速停车,然后电梯再向下运行,越过下强迫减速点后减速,直到最底层门区停车(认识下端站的过程);最后电梯将由最底层门区向上运行,直到最高层门区停车,井道学习完毕.井道学习完毕后,电脑将显示实际楼层数和take-overlearning.步骤四: 断开S2开关,电脑显示shaft+floors 按确认键.接着进入电脑主菜单, Main menue: test and end 测试结束按确认键,电脑显示如下:Please waitTest of parametersClose writing-protection步骤五: 合上S2开关,自学习完成。