PLC在可控硅直流调速系统中的应用设计
可控硅直流调速系统
可控硅直流调速系统可控硅直流调速系统(电气综合课程设计)目录前言-----------------------------------------------------3第1章课程的设计和要求1.1主要性能指标-----------------------------------------41.2设计要求----------------------------------------------------41.3给定条件----------------------------------------------------4第2章系统的原理与方案选择2.1直流电动机调速的原理依据------------------------------42.2直流调速系统方案的选择---------------------------------52.3控制系统的选择--------------------------------------------6第3章调速系统的设计3.1系统的组成-------------------------------------------------63.2系统的动态数学模型--------------------------------------8 第4章双闭环直流调速系统的设计(工程设计法)4.1主要装置的选用和参数的计算----------------------------84.2电流调节器的设计-----------------------------------------104.3转速调节器的设计-----------------------------------------124.5整机电路图-------------------------------------------------15第五章总结----------------------------------------------16参考文献------------------------------------------16前言1957年,晶闸管问世,它是一种大功率半导体可控整流元件,俗称可控硅整流元件,简称“可控硅”,20世纪60年代起就已生产出成套的晶闸管整流装置。
基于PLC的直流电机调速系统设计
*******学院毕业设计基于PLC的直流电机调速系统设计学生:学号:专业:班级:指导教师:****学院自动化与电子信息学院****年摘要设计选用日本三菱公司FX2N -16MT基本单元和FX2N-4AD,FX2N-2DA 模拟量输/输出扩展模块,并利用其功能指令设计的直流脉宽双闭环调速系统,实现了调速过程速度快、精度高,控制系统的参数便于调试和高工作可靠性,通过给定的调速系统硬件配置和梯形图,经模拟调试输出信号验证了各项指标均满足调速系统的要求。
关键词:PLC;调速系统;应用ABSTRACTThe double closed-loop DC PWM speed system of direct motor uses the FX2N-16MT basic unit of Japanese Mitsubishi company and FX2N-4ADs, FX2N-2DA emulation input/ output expanding mold , making use of its function instruction. It realizes fast adjust mend of the speed course , high precision, which make it easy to debug control procedure and work reliable, which is a development direction in the industrial control. Hardware disposition and ladder chart are given in this text. It can be adjusted by emulation and various index signs of output signal all satisfy the requirements of the adjust system.Key words:PLC;A djusting Speed System;A pplication3目录1.1 直流调速系统的发展史概述 (5)1.2 可编程控制器PLC (6)1.2.1 PLC的发展概述 (6)1.2.2 PLC的特点 (7)1.3 选题背景及论文主要内容 (8)1.3.1 选题背景 (8)1.3.2 论文的主要内容 (8)第 2 章直流调速系统 (10)2.1 调速系统的性能指标 (10)2.1.1 稳态性能指标 (11)2.1.2 动态指标 (12)2.2 PWM直流调速系统 (14)2.2.1 直流电动机的PWM控制原理 (14)2.2.2 PWM直流调速系统的组成 (15)2.2.3 PWM调速系统的主要参数 (21)2.3 双闭环直流脉宽调速系统 (23)2.3.1 电流、转速反馈环节 (23)2.3.2 设计中的调节器计算 (24)2.3.3 双闭环脉宽调速系统的起动过程 (29)第 3 章现代PLC控制技术 (31)3.1 PLC的组成和分类 (31)3.2 PLC的工作原理 (31)3.3 PLC电机控制系统设计的基本内容和步骤 (33)3.3.1 PLC的硬件设计的一般步骤 (33)3.3.2 PLC软件设计的一般步骤 (34)3.3.3 设计中用到的模块 (35)第 4 章基于PLC的直流电机调速系统设计 (37)4.1 设计任务 (37)4.2 脉宽调制系统特有部分设计 (37)4.3 PLC硬件设计 (38)4.4 PLC 软件设计 (40)结束语 (43)致谢 (44)参考文献(主要及公开发表的文献) (2)附录 (4)第 1 章引言传统直流电动机双闭环调速系统采用的是继电器控制,加PI 调节器及校正装置,实现控制系统稳定运行。
基于PLC的直流电机调速系统设计方案

基于PLC的直流电机调速系统设计方案
设计方案如下:
1. 硬件设计:
- 选择一块适配的PLC控制器作为主控制单元;
- 选择适配的直流电机作为驱动装置;
- 选择适配的输入输出模块,包括数字输入模块和模拟输出模块;
- 选择适配的传感器,如速度传感器和电流传感器。
2. 系统连接:
- 将输入模块与传感器连接,以便获取所需的输入信号; - 将输出模块与驱动装置连接,以控制电机的速度;
- 将PLC控制器与输入输出模块连接,以实现信号的采集和控制命令的输出。
3. 系统控制:
- 编写PLC控制程序,包括数据采集、数据处理和控制输出等部分;
- 设计调速算法,根据所需的速度控制要求,计算控制输出;
- 根据实际情况进行参数调整和校正,以达到较好的调速效果。
4. 系统测试:
- 对整个系统进行测试,包括信号采集、数据处理和控制输出等部分;
- 测试系统的响应速度、稳定性和精度,根据实际情况进行参数调整和校正。
5. 安全保护:
- 在设计中考虑安全保护措施,如过电流保护、过温保护等;
- 在控制程序中添加故障检测和报警功能,以及急停功能。
最后,根据具体的应用要求和实际情况,可以对设计方案
进行扩展和改进。
(完整版)晶闸管可控整流技术直流电机调速系统设计

目录1 绪论 (1)1.1 课题背景 (1)1。
2 直流电动机调压调速可控整流电源设计简介 (1)1。
3 课题设计要求 (1)1.4 课题主要内容 (2)2 主电路设计 (3)2.1 总体设计思路 (3)2.2 系统结构框图 (3)2。
3 系统工作原理 (4)2。
4 对触发脉冲的要求 (5)3 主电路元件选择 (6)3.1 晶闸管的选型 (6)4 整流变压器额定参数计算 (7)4。
1 二次相电压U2 (7)4.2 一次与二次额定电流及容量计算 (8)5 触发电路的设计 (10)6 保护电路的设计 (12)6.1 过电压的产生及过电压保护 (13)6。
2 过电流保护 (13)7 缓冲电路的设计 (14)8 总结 (17)1 绪论1.1 课题背景当今,自动化控制系统已在各行各业得到广泛的应用和发展,而自动调速控制系统的应用在现代化生产中起着尤为重要的作用,直流调速系统是自动控制系统的主要形式.由可控硅整流装置供给可调电压的直流调速系统(简称KZ—D系统)和旋转变流机组及其它静止变流装置相比,不仅在经济性和可靠性上有很大提高,而且在技术性能上也显示出较大的优越性。
可控硅虽然有许多优点,但是它承受过电压和过电流的能力较差,很短时间的过电压和过电流就会把器件损坏。
为了使器件能够可靠地长期运行,必须针对过电压和过电流发生的原因采用恰当的保护措施.为此,在变压器二次侧并联电阻和电容构成交流侧过电压保护;在直流负载侧并联电阻和电容构成直流侧过电压保护;在可控硅两端并联电阻和电容构成可控硅关断过电压保护;并把快速熔断器直接与可控硅串联,对可控硅起过流保护作用。
随着电力电子器件的大力发展,该方面的用途越来越广泛.由于电力电子装置的电能变换效率高,完成相同的工作任务可以比传统方法节约电能10%~40%,因此它是一项节能技术,整流技术就是其中很重要的一个环节.1.2 直流电动机调压调速可控整流电源设计简介该系统以可控硅三相桥式全控整流电路构成系统的主电路,采用同步信号为锯齿波的触发电路,本触发电路分成三个基本环节:同步电压形成、移相控制、脉冲形成和输出。
电工(技师)考试试题题库(含答案)

电工(技师)考试试题题库(含答案)1、【单选题】110KV以上电力变压器的主要结构有哪些()。
( D )A、铁芯、绕组、外壳B、铁芯、外壳、套管C、绕组、导电杆、变压器D、铁芯、绕组、外壳、套管及冷却系统2、【单选题】3DG6型晶体管的ICM=20mA,BUCE0=20V,PCM=100mW,如果将它接在电路中,IC=15mA,UCE=10V,则该管。
( C )A、工作正常B、击穿C、管子过热甚至烧坏D、必定烧坏3、【单选题】FX2N系列PLC加法指令的助记符是。
( B )A、ADCB、ADDC、SUBD、MUL4、【单选题】GTO是指。
( D )A、电力二极管B、晶闸管C、双极型晶体管D、门极关断晶闸管5、【单选题】下列不属于同步信号为锯齿波的触发电路的优点是。
( D )A、不受电网电压波动与波形畸变的影响B、抗干扰能力强C、移相范围宽D、整流装置的输出直流平均电压与控制电压不是线性关系6、【单选题】下列哪个不属于断路器控制回路的调试范围()。
( B )A、能监视电源及跳合闸回路B、操作电压应满足要求C、有防跳跃闭锁装置D、合闸或跳闸完成后,应使命令脉冲自动解除7、【单选题】与门电路的真值表()是正确的。
( D )A、1B、11C、111D、11118、【单选题】二进制数1011101等于十进制数的。
( B )A、92B、93C、94D、959、【单选题】交流伺服系统的性能指标可以从、定位精度、稳速精度、转矩波动、动态响应和运行稳定性等方面来衡量。
( D )A、运行效率B、转速误差C、纹波系数D、调速范围10、【单选题】交流电动机变频调速矢量控制的思路是分别对速度和两个分量进行独立控制。
( D )A、电压B、电流C、电枢D、磁场11、【单选题】伺服电动机具有控制精度高、过载能力强、启动转矩大、动态响应快、调速范围宽、机械特性和调速特性的线性度高、()等特点。
( B )A、效率高B、无自转现象C、价格低D、容量大12、【单选题】伺服电机选用的基本原则是当量匹配、惯量匹配、力矩匹配和。
可编程控制技术在直流调速系统中的应用
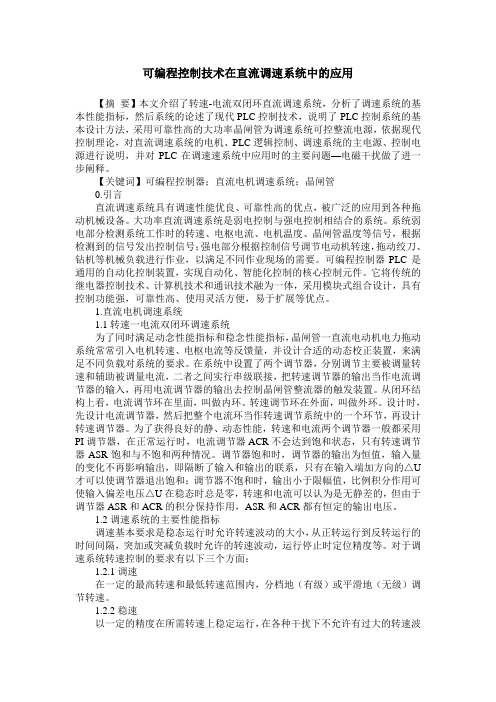
可编程控制技术在直流调速系统中的应用【摘要】本文介绍了转速-电流双闭环直流调速系统,分析了调速系统的基本性能指标,然后系统的论述了现代PLC控制技术,说明了PLC控制系统的基本设计方法,采用可靠性高的大功率晶闸管为调速系统可控整流电源,依据现代控制理论,对直流调速系统的电机、PLC逻辑控制、调速系统的主电源、控制电源进行说明,并对PLC在调速速系统中应用时的主要问题—电磁干扰做了进一步阐释。
【关键词】可编程控制器;直流电机调速系统;晶闸管0.引言直流调速系统具有调速性能优良、可靠性高的优点,被广泛的应用到各种拖动机械设备。
大功率直流调速系统是弱电控制与强电控制相结合的系统。
系统弱电部分检测系统工作时的转速、电枢电流、电机温度、晶闸管温度等信号,根据检测到的信号发出控制信号;强电部分根据控制信号调节电动机转速,拖动绞刀、钻机等机械负载进行作业,以满足不同作业现场的需要。
可编程控制器PLC是通用的自动化控制装置,实现自动化、智能化控制的核心控制元件。
它将传统的继电器控制技术、计算机技术和通讯技术融为一体,采用模块式组合设计,具有控制功能强,可靠性高、使用灵活方便,易于扩展等优点。
1.直流电机调速系统1.1转速一电流双闭环调速系统为了同时满足动念性能指标和稳念性能指标,晶闸管一直流电动机电力拖动系统常常引入电机转速、电枢电流等反馈量,并设计合适的动态校正装置,来满足不同负载对系统的要求。
在系统中设置了两个调节器,分别调节主要被调量转速和辅助被调量电流,二者之间实行串级联接,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
从闭环结构上看,电流调节环在里面,叫做内环。
转速调节环在外面,叫做外环。
设计时,先设计电流调节器,然后把整个电流环当作转速调节系统中的一个环节,再设计转速调节器。
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用PI调节器,在正常运行时,电流调节器ACR不会达到饱和状态,只有转速调节器ASR饱和与不饱和两种情况。
基于pic16f877数字式直流调速系统毕业设计
LANZHOU UNIVERSITY OF TECHNOLOGY毕业设计题目:基于PIC16F877数字式直流调速系统设计学生姓名XXXXXXXXX学号联系专业班级电气工程及其自动化指导教师XXXXX学院继续教育答辩日期2016年9月继续教育学院毕业设计(论文)任务书题目基于PIC16F877数字式直流调速系统设计学生姓名XXXX 班级电气工程及其自动化学号联系题目类型工程设计指导教师XX 系主任XX 一、毕业设计(论文)的技术背景和设计依据:数字直流调速系统,主要用于解决电动机转速控制问题,其根本任务就是通过单片机控制可控硅的触发脉冲的脉冲宽度来改变电压的。
在整个系统中通过按键来控制电动机的正转,反转,停车,并用交流电流互感器来测量主电路中的电流,通过三相整流桥将测得的交流电流整流成直流,通过取样电阻取样,再通过放大器放大,送入单片机进行AD转换,在程序中进行电机的软件保护。
通过PID算法来调节电机的起动特性,限制起动电流,避免起动电流过大。
电机的转速用光电编码器能够测出,测出的转速值用数码管显示出来。
整个系统中通过四个按键来实现控制:正转按键,反转按键,停车按键,参数设定按键。
参数设定按键是来改变PWM的占空比,产生的PWM波通过滤波电压放大送给六路移相触发器作为移相电压,移相电压的大小能够改变六路可控硅触发脉冲的宽度,从而改变了电压,达到了调速的目的。
二、毕业设计(论文)的任务1、熟悉题目要求,查阅相关科技文献二、方案设计(包括方案论证与肯定、技术经济分析等内容)3、硬件和软件设计(其中还包括硬件配置、设备及元器件选择、程序说明等)4、撰写设计说明书(毕业论文),绘制图纸三、毕业设计(论文)的主要内容、功能及技术指标1、毕业设计(论文)的主要内容(1)课题研究的意义及目的,国内外研究的现状;(2)了解主要控制对象和控制功能;(3)控制算法的研究及控制器设计;(4)控制系统的整体设计;(5)控制系统的硬件配置;2、设计实现的主要功能(1)单片机按照工作要求发出相关指令;(2)具有故障检测与保护功能;3、主要技术指标本系统要求运行安全靠得住,系统能够显示转速值,具有手动和自动控制功能。
直流调速系统原理及应用
系统组成与工作原理
系统组成
直流调速系统主要由直流电动机、电源装置、控制器和执行器等组成。
工作原理
通过控制器对电源装置进行控制,改变直流电动机的端电压或电枢电流,从而实 现对电动机转速的调节。控制器根据设定的转速与实际转速的偏差,采用相应的 控制算法对电源装置进行调节,使电动机转速趋近于设定值。
02
粒子群优化算法
通过模拟鸟群觅食行为来寻找最优解。这种方法具有并行 计算和简单易实现的优点,但容易陷入局部最优解。
模拟退火算法
模拟固体退火过程来寻找全局最优解。这种方法可以避免 陷入局部最优解,但需要合适的退火计划和较长的计算时 间。
05
系统设计与实现举例
设计要求与性能指标
调速范围
满足设备在不同工作条件下的 调速需求,通常调速范围应达
• 缺点:需要配合适当的滤波电路以减小电流脉动对电机和电源的影响; 高速时电机特性变硬,输出转矩增大,可能导致电机过载。
04
控制策略及优化方法
传统控制策略简介
转速负反馈控制
通过测量电机转速,并将其与设定值进行比较,产生误差信号来 控制电机转速。这种方法简单有效,但动态响应较慢。
电压负反馈控制
将输出电压作为反馈信号,通过调节输出电压来控制电机转速。这 种方法可以提高系统的稳定性,但调速范围有限。
直流电机原理及特性
直流电机基本结构
ቤተ መጻሕፍቲ ባይዱ定子
电刷与换向器
包括主磁极、换向极、机座和端盖等 部分,主要作用是产生磁场和作为电 机的机械支撑。
电刷与换向器一起构成直流电机的电 流换向装置,使电枢绕组中的电流方 向交变,以产生恒定的电磁转矩。
转子
又称电枢,主要由电枢铁心、电枢绕 组、换向器、轴和风扇等组成,是直 流电机中产生感应电动势和电磁转矩 进行能量转换的部件。
直流电动机调压调速可控整流电源设计
第2章主电路设计2.1 总体设计思路本次设计的系统以可控硅三相桥式全控整流电路构成系统的主电路,根据三相桥式全控整流电路对触发电路的要求,采用同步信号为锯齿波的触发电路,设计时采用恒流源充电,输出为双窄脉冲,脉冲宽度在8°左右。
本触发电路分成三个基本环节:同步电压形成、移相控制、脉冲形成和输出。
此外,还有双窄脉冲形成环节。
同时考虑了保护电路和缓冲电路,通过参数计算对晶闸管进行了选型。
三相可控整流电路的控制量可以很大,输出电压脉动较小,易滤波,控制滞后时间短。
,由于三相半波可控整流电路的主要缺点在于其变压器二次侧电流中含有直流分量,为此在应用中较少。
而采用三相桥式全控整流电路,可以有效的避免直流磁化作用。
根据已知要求,额定电流为50A,额定电压为150V,可求的功率P=50*150=7.5KW,一般整流装置容量大于4KW,选用三相整流较为合适。
2.2 系统结构框图三相全控桥式整流电路如图2-1所示。
图2-1系统结构框图2.3 系统工作原理其工作原理详细分析如下:在t1~t2ωω间,U 相电压最高,共阴极组的VT1管被触发导通,电流由U 相经VT1流向负载,又经VT6流入V 相,整流变压器U 、V 两相工作,所以三相全控桥输出电压Ud 为:Ud=Ud1-Ud2=Uu-Uv=Uuv经过60º进入t2~t3ωω区间,U 相电压仍然最高,VT1继续导通,W 相电压最低,在VT2管承受的2交点时刻被解发导通,VT2管的导通使VT6承受uwv 的反压关断。
这区间负载电流仍然从电源U 相流出经VT1、负载、VT2回到电源W 相,于是这区间三相全控桥整流输出电压Ud 为:Ud=Uu-Uw=Uuw经过60º,进入t3~t4ωω区间,这时V 相电压最高,在VT3管00α=的3交点处被触发导通。
VT1由于VT3和导通而承受Uuv 的反压而关断,W 相的VT2继续导通。
负载电流从V 相流W 相,于是这区间三相全控输出电压Ud 为:Ud=Uv-Uw=Uvw其他区间,依此类推,电路中6只晶闸管导通的顺序及输出电压很容易得出。
基于PLC的直流电机调速控制器设计
基于PLC的直流电机调速控制器设计作者:郝结来谢军来源:《江苏理工学院学报》2018年第06期摘要:基于PLC的直流电机调速控制器以三菱FX2N为核心,通过定时器T246和T247实现了PWM波的输出功能,使PWM输出不受输出继电器的限制。
系统设置了启动开关自锁按键,三档位速度控制旋钮。
通过软件继电器M0实现了软件程序启动自锁,防止启动开关异常时程序无法启动的问题。
设置系统启动指示灯和电机启动指示灯,便于用户知晓系统工作是否正常。
通过对6 V小型直流电机的实验,论证了该控制器能够达到较好的控制效果。
关键词:PLC;PWM;定时器;电机调速中图分类号:TM925.11;TP273 文献标识码:A 文章编号2095-7394(2018)06-0047-05直流电机在生产生活中应用广泛,对直流电机的速度调控只需要控制电机的工作电压即可[1],这也是其应用广泛的一个重要原因。
利用PWM脉宽调制方法,可方便地控制负载端的平均电压,在脉冲的低电压趋近于0时,负载的平均电压与PWM的占空比成正比[2-4]。
三菱FX2N型PLC是一款小型高性能的超小程序裝置,具有配置固定灵活,编程简单,高性能与高运算速度等特点,具有丰富的软件定时器与软件继电器,可满足多样化广泛需求。
1 PWM输出与PLC配置1.1定时器PWM输出配置定时器PWM波输出配置PWM波是周期变化的方波信号,其占空比可调,通过调节占空比可实现不同平均电压的输出[5-7]。
PWM波形函数可表示为:在PLC中可使用高速定时器完成PWM波的输出功能,三菱FX2N型PLC内部集成有PWM输出功能[ PWM S1 S2 D],其中S1用于指定脉冲的宽度,S2用于指令脉冲的周期,单位都为 ms,取值范围为0~32767,S1应小于等于S2。
D用于指令脉冲输出端口,FX2N晶体管输出型PLC仅能使用Y0和Y1作为PWM输出口。
在保证PWM输出性能的情况下,选择使用高速定时器可克服上述缺陷。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC在可控硅直流调速系统中的应用设计
随着计算机控制技术的迅速发展,以微处理器为核心的可编程序控制器(PLC)已逐步替代继电器控制,在各行业的自动化控制领域得到普遍应用。
煤炭行业正在依靠现代化高科技手段对现有陈旧电气控制设备进行更新换代。
可控硅直流调速系统控制的发展,经历了分立元件和集成运放两代模拟控制电路,最终由PLC数字程控所代替。
前两种在实践应用时,普遍存在由于设计问题和动、静态响应影响以及电子元件动态参数变化,还有给定与反馈作用误差产生的稳态误差,使得系统产生振荡、超调和起车惯性大等危害。
东海煤矿二水平钢丝绳胶带提升机于1990年投产使用,历经两代调速控制系统的使用,始终存在运行不稳、振荡、超调、起车惯力大等多方面实际故障。
2004年11月将控制系统改换成PLC数字控制,解决了上述困扰。
该系统经改制后使用证实具有运行平稳、可靠、节省电能、操作方便、自动化程度高、无故障等优点。
1 系统改前后使用的设备
(1)改制前的设备,有继电器柜一套和后期改造时引进KGSFA2t型调节柜、整流柜、励磁柜各3套(其中2套分别用于2台直流电动机,另一套做备用设备),每套整流柜内三相全桥整流由18个400A可控硅完成。
(2)改制后只选用整流柜和电源柜、控制柜各一套(西门子公司技术),将提升机2台ZD2—151B一400kW/440V直流电动机电枢串联,因此用一套整流系统。
PLC可编程控制器镶嵌在操纵台内,它是该系统的指挥中枢(相当于微机内中央处理器CPU),接收和控制机构是控制柜内两台6RA7018整流控制装置,其中一套控制两台直流电动机串联电枢整流管(6个1 200 A可控硅)控制极,另一套控制励磁用。
2 程序控制系统各部件作用
(1)电源柜(低压供电系统)。
对系统电机风机、制动闸、制动油泵、润滑油电机等提供电源和进行控制,并为PLC、微机和传动部分等提供各种电源。
(2)PLC可编程控制器。
利用计算机接口将各种控制信号(如安全回路、各段保护、高压分合闸、快开控制等各种运行方式等)编程输入PLC输入接口,给PLC程序处理按顺序储存,在程序存储器内编辑的程序进行运算,最后做出状态输出,通过外部输出接口控制整流部件6RA7018。
西门子公司的PLC可编程控制器,是控制信号电压由0~10 V模拟信号转换成数码。
即将模拟信号变换成数字信号装置(A/D转换),通过内部S一自锁,R一只读,V一故障设置等继电程序设置以及程序、指令编排,最后通过外输控制整流控制装置6RA7018或电源柜内控制部件。
(3)控制柜。
主要由2台整流装置6RA7018组成,其主要功能是接收PLC指令后,产生脉冲控制直流电动机主回路中的三相桥式整流电路6个1200 A和励磁用可控硅触发信号的导通角仅(或推B角),以达到PLC预期设置的直流电动机恒转速转动输出。
整流控制装置
6RA7018自身也有接口联通计算机进行指令读写、修改、删除;并还有直观的显示,显示其正常工作状态值和相对应故障以及自锁值;在其前面板镶有触摸键,用以微调和转换原设置的参数用。
3 数字与模拟控制静动态参数分析比较
3.1 可控硅直流控制
当采用速度、电压、电流三环控制时其方框图(即数学模型)。
通常闭环系统的参考输入和拢动量恒定不变时,被控量也恒定不变。
当参考输入或拢动量发生变化时,反馈量将与参考输入之间产生新的作用误差,通过控制作用,使被控量(输出量)按新的参考输入值稳定
下来或趋于恢复到原来的数值达到新的平衡,但由于系统总存在着惯性或储能元件,使达到新的平衡状态不能瞬时完成,要经过过渡过程。
图1 速度、电压、电流三环控制方框图
在摸拟控制电路设计时,无论是在时域还是频域考虑,都要求系统首先必须是稳定,对超调量、过渡过程的时间、振荡次数提出一定要求,再就是系统稳态误差应满足。
可这三种要求之间又相互矛盾和制约,很难建立一个同时达到理想状态系统结构和参数。
3.2数字控制(PLC)
由于该控制系统为非线性系统,故将其设置在饱和非线性状态,。
由于该控制系统采用数码的形式传递,为数控系统,该系统的动态性能可用差分方程过程描述。
在非线性系统中,暂态响应曲线的形状与输入信号的幅值有关,这是因为非线性系统不服从迭加原理的缘故;数字控制非线性系统的稳定性不取决于系统的结构和参数;非线性系统振荡在物理上是可存在的,但振幅是确定的,与初始条件无关;再就是非线性系统输出量(或信号)不包含输入信号频率的正弦分量。
PLC对模拟量信号的处理,是将模拟信号变换成数字信号(A/D转换)。
A /D变换精度取决于A/D变换器的位数,如10 V电压要求以1 mV精度变换时,精度1 m~/10 V=0.01%,即1/3200十进制的3200用二进制表示10位,该系统精度等级足以满足控制系统要求。
且该系统中采用6RA7018整流装置均以积分方式变换,可使信号尖峰平均化,从而使系统运行平稳、可靠。
图2 饱和非线性状态曲线
PLC通过通讯接口和通讯协议,与6RA7018进行双工通讯,将工作状态与运行参数相互传递,并能实现动态显示。
同时操作6RA7018可将指令传至PLC,从而控制系统的运行状态。
PLC、6RA7018不但能显示系统运行状态和参数,还能记录系统运行故障数据,显示故障点,从而缩短故障查找、排除时间。
由于该系统可对励磁电流实行无极控制,根据直流电机机械特性方程式中不难看出当转速n恒定时,通过改变励磁电流来使得磁通改变对转矩有较宽的调整,避免只调整主回路电压而产生比较大的电能损耗,从而可降低能耗费用。
4 结束语
随着科技不断发展,PLC数字控制将会在自动控制,通讯程控等领域得到更多、更好的应用和发展。