怎样检查伺服驱动器-英文-中文批注
三菱伺服驱动器报警应该如何排查?
三菱伺服驱动器报警应该如何排查?三菱伺服驱动器报警,应该如何排查?可以从有无显示、缺相、过压的方式检测和屏幕是否黑屏、蓝屏等,模块是否有损失。
下面小编为你介绍三菱伺服驱动器报警,应该如何排查?伺服驱动器故障:有无显示、缺相、过流、过压、欠压、过热、过载、接地、参数错误、有显示无输出、模块损坏、报错。
屏无显示,屏幕不亮,黑屏,蓝屏,花屏等。
把基频以下和基频以上两种情况的控制特性画在一起,如下图所示矢量控制矢量控制,也称磁场定向控制 2) 串级调速:绕线转子异步电动机串级调速是将转差功率加以利用的一种经济、的调速,改变转差率的是在转子回路中串入不同的电阻以不同斜率的机械特性,从而实现速度的调节变频器说明书,变频器故障代码,变频器故障。
另外,它有速度调节器,利用速度反馈构成闭环控制,速度的静态误差小上电,变频器未接受启动,变频器在自检结束后,即报出oc故障交流变频调速的是异步电机有发展前途的调速。
变频器,伺服驱动器故障主要有无显示、缺相、过流、过压、欠压、过热、过载、接地、参数错误、有显示无输出、模块损坏、报错。
屏无显示,屏幕不亮,黑屏,蓝屏,花屏等。
通常故障情况可由伺服驱动器上显示代码来初步判断,以下是几种常见的故障及其排查方法:1、AL.E6 -表示伺服紧急停止。
引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,另一个是CN1口EMG和SG之间没有接通。
2、AL.37-参数异常。
内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。
一般参数恢复成出厂值即可解决。
3、AL.16-编码器故障。
内部参数乱或编码器线故障或电机编码器故障。
参数恢复出厂值或者更换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。
4、AL.20-编码器故障。
电机编码器故障或线缆断线、接头松动等导致。
更换编码器线或伺服电机编码器。
MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。
5、AL.30-再生制动异常。
伺服驱动器维修手册

伺服驱动器维修手册一、设备概述本手册旨在提供伺服驱动器维修的基本信息和指导,涵盖了设备概述、维修程序、故障诊断、零件替换、维护与保养、安全操作、性能测试和技术支持等方面。
本手册将帮助维修人员了解伺服驱动器的结构、功能和工作原理,并提供针对不同问题的解决方案。
二、维修程序1.断电:在进行任何维修工作之前,必须先关闭伺服驱动器的电源,并确保主电源已断开。
2.外观检查:观察伺服驱动器是否有明显的损坏或异常情况,例如外壳损坏、电线脱落等。
3.故障诊断:根据故障现象,借助本手册的故障诊断部分进行诊断,确定可能的故障原因。
4.零件替换:根据需要,可以更换故障零件或部件。
请参考本手册的零件替换部分进行操作。
5.重新上电:完成维修后,重新给伺服驱动器上电,并测试其功能是否正常。
三、故障诊断以下是一些常见的伺服驱动器故障及诊断方法:1.电源故障:电源线脱落或断路可能导致电源故障。
检查电源线是否连接正常,测量电源电压是否在规定范围内。
2.显示异常:显示面板可能出现异常,如黑屏、花屏等。
检查显示面板连接是否牢固,是否需要更换显示面板。
3.报警故障:伺服驱动器可能发出报警信号,提示某些故障。
查阅报警代码或指示灯状态,根据本手册进行故障诊断。
4.运行异常:伺服驱动器在运行过程中可能出现异常声音或振动。
检查机械传动部分是否正常,例如轴承、链条等。
四、零件替换在零件替换过程中,需要注意以下几点:1.断电操作:在进行任何带电操作之前,必须先关闭伺服驱动器的电源,并确保主电源已断开。
2.选用合适的零件:确保所替换的零件与原设备相匹配,包括型号、规格和性能参数等。
3.操作规范:遵循本手册的指导进行操作,确保安全可靠。
4.安装质量:确保所替换的零件安装正确、牢固,以免造成意外损失。
五、维护与保养为了保持伺服驱动器的良好运转状态和延长其使用寿命,建议进行以下维护与保养措施:1.定期检查:定期检查伺服驱动器的外观、电源连接、电缆等部分,确保其状态良好。
富士伺服驱动器的常用故障代码及其检查与维护
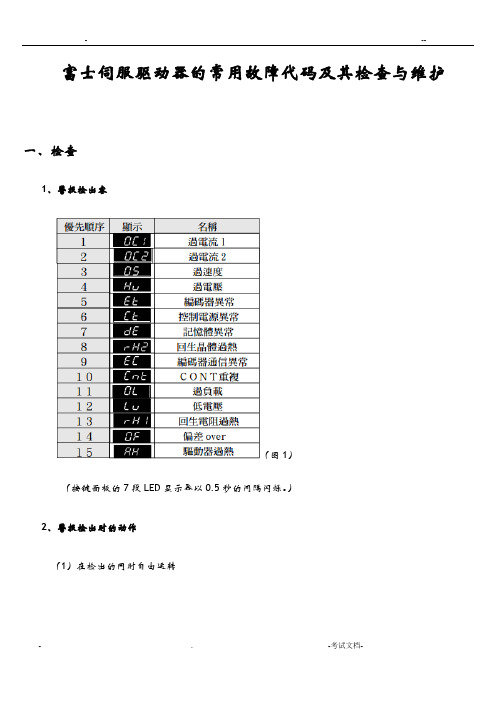
富士伺服驱动器的常用故障代码及其检查与维护一、检查1、警报检出容(图1)(按键面板的7段LED显示器以0.5秒的间隔闪烁。
)2、警报检出时的动作(1)在检出的同时自由运转(图2)(2)以最大转矩减速,停止后自由运转(图3)二、维护1、过电流【显示】(图4)【检出容】主回路晶体的输出电流超过规定值。
【要因与处置】(图5)伺服马达的动力沛县有可能漏电或短路。
通常,对地间有数MΩ以上,线圈之间的电阻值均衡。
2、过速度【显示】(图6)【检出容】伺服马达的回转速度超过最高速度的1.1倍。
【要因与处置】(图7)马达的回转速度有可能出现峰突。
(图8)3、过电压【显示】(图9)【检出容】伺服驱动器部的直流中间电压比上限值大。
【要因与处置】(图10)可以在按键面板的监视模式确认部的中间电压。
On 16:直流中间电压(最大值)On 17:直流中间电压(最小值)约在420V时检出电压。
4、编码器异常【显示】(图11)【检出容】伺服马达部的编码器可能已损坏。
【要因与处置】(图12)编码器部的CPU是以自我诊断的结果来检出警报的。
这时,伺服驱动器马达之间正在进行通信。
5、控制电流异常【显示】(图13)【检出容】伺服驱动器部的控制电源发生异常,有损坏的可能性。
【要因与处置】(图14)6、记忆体异常【显示】(图15)【检出容】保存在伺服驱动器EEPROM部的参数容已损坏。
【要因与处置】(图16)发生记忆体异常时,请执行参数的初始化。
执行初始化之后仍然会检出记忆体异常时,必须更换驱动器。
7、回生晶体过热【显示】(图17)【检出容】伺服驱动器装的回生处理用晶体过热。
【要因与处置】(图18)8、编码器通信异常【显示】(图19)【检出容】安装于伺服马达的编码器无法与伺服驱动器通信。
【要因与处置】(图20)伺服马达的编码器配线有可能脱落或是断线。
伺服驱动器与编码器之间是串列通信。
请使用选购品连接线或是指定的电线。
编码器配线的电压振幅约+5V,所以请勿铺设在强磁界、强电界的场所。
伺服电机和驱动单元的检测和维护
伺服电机和驱动单元的检测和维护
2012-12-26
1. 伺服电机的检修内容:
●震动及声音的确认:伺服电机在运行中,随时观察电机的响声和震动情况,根据感觉及听觉判断与平时相比没有增大。
●外观的检修:根据污损状况,经常用布拭擦或用气枪清扫。
●绝缘电阻的测量:至少每年一次,测量时,切断与伺服单元的连接,请用500V 兆欧表测量。
电阻值超过10MΩ则为正常。
当为10MΩ
以下时,请与伺服电机服务部门联系。
●油封的更换:至少每5千小时一次,请将其从机械上拆下后更换。
此项仅限带油封的伺
服电机。
●综合检修:最低为每2万小时或5年一次。
●用户请不要自行拆卸或清扫伺服电机。
●测量电阻时,请选择电机动力线U、V、W的某一相与PG间进行测量。
2. 伺服驱动单元的维护虽然伺服驱动单元不必进行日常的检修,但以下项目每年请检修一次以上。
●机身及电路板的清扫:至少每年一次,保持机身及电路板没有垃圾、灰尘、油迹等。
清理时请用布擦拭或气枪清扫。
●检查螺丝的松动:至少每年一次,检查接线板、连接器安装螺丝等应不得有松动。
如发现松动请进一步紧固。
●检查机身、电路板上的零件是否有异常:至少每年进行一次,不得有因发热引起的变色、破损及断线等。
伺服电机缺相检测方法

伺服电机缺相检测方法English:One common method for detecting phase loss in a servo motor is to monitor the back EMF (electromotive force) signals. Back EMF is the voltage generated by the motor as it rotates and interacts with the magnetic field. When a phase is lost, the back EMF signal for that particular phase will not be present or will show abnormalities. By monitoring and analyzing the back EMF signals, it is possible to detect if there is a phase loss in the servo motor. Another method is to use a current sensor to measure the current flowing through each phase of the motor. If there is a phase loss, the current in that phase will be significantly lower or zero. By comparing the current levels in each phase, it is possible to identify if there is a phase loss in the servo motor. In addition, some servo drives have built-in phase loss detection functions, where the drive can automatically detect if there is a phase loss and trigger an alarm or fault condition. This can be a convenient and effective method for detecting phase loss in a servo motor without the need for additional external sensors or equipment.Translated content:一种常见的伺服电机缺相检测方法是监测反电动势(EMF)信号。
伺服驱动英语专业术语

伺服驱动英语专业术语《伺服驱动英语专业术语》引言:伺服驱动是现代工业中应用广泛的关键技术之一,具有精确控制、高效运动和稳定性等优势。
为了更好地理解和使用伺服驱动技术,掌握相关专业术语是必不可少的。
本文将介绍一些常用的伺服驱动英语专业术语,以帮助读者更好地学习和研究该领域。
一、伺服驱动系统常用术语:1. Servo Drive:伺服驱动2. Servo Motor:伺服电机3. Feedback Device:反馈装置4. Encoder:编码器5. Resolver:转角传感器6. Stepper Motor:步进电机7. Closed-loop Control:闭环控制8. Open-loop Control:开环控制9. Torque:扭矩10. Speed Control:速度控制11. Position Control:位置控制12. Motion Control:运动控制二、伺服驱动技术常用术语:1. Pulse Width Modulation (PWM):脉宽调制2. Gain:增益3. Proportional-Integral-Derivative (PID) Control:比例积分微分控制4. Feedforward:前馈控制5. Inertia:惯性6. Damping:阻尼7. Backlash:间隙8. Gear Ratio:传动比9. Closed-loop Gain:闭环增益10. Phase Compensation:相位补偿11. Velocity Profile:速度曲线12. Lead-lag Compensation:前导-滞后补偿三、伺服驱动通信协议常用术语:1. CAN Bus (Controller Area Network):控制器局域网2. Modbus:现场总线通信协议3. EtherCAT (Ethernet for Control Automation Technology):以太网实时控制技术4. Profibus:连续处理传送技术5. DeviceNet:设备网络6. RS-485:串行通信接口标准结论:掌握伺服驱动英语专业术语对于学习和理解伺服驱动技术至关重要。
如何对伺服系统进行参数测试
如何对伺服系统进行参数测试伺服系统是一种高精度、高性能的运动控制系统,广泛应用于机器人、数控机床、航空等领域。
因为伺服系统的应用非常广泛,所以系统测试和参数调试变得尤为重要。
本篇文章将介绍如何对伺服系统进行参数测试。
1. 了解伺服系统参数在开始测试伺服系统之前,我们需要了解伺服系统中常见的参数。
这些参数包括位置误差、速度误差、时间延迟、响应时间等。
根据不同的应用场景和要求,可以针对不同的参数进行测试和调节。
2. 准备测试工具测试伺服系统需要使用一些专业的测试工具,例如位置传感器、速度传感器、数据采集卡等。
选择合适的测试工具可以提高测试的精度和准确性。
3. 进行测试测试伺服系统需要按照一定的步骤进行。
首先,需要对伺服系统进行基本的校准,包括位置校准和速度校准。
然后,根据所需的测试参数,选择相应的测试方案进行测试。
在测试过程中,需要记录数据和参数,并根据测试结果进行参数调整。
4. 分析测试结果测试结果的分析包括对测试过程中记录的数据进行分析和比较。
可以将测试结果与伺服系统的理论性能进行比较,找出其中的差异和问题,并进行相应的调整。
5. 不断优化伺服系统的性能和稳定性是需要不断优化的。
通过对伺服系统进行参数测试和调试,可以进一步提高系统的精度和性能。
在实际应用中,还可以通过不断优化伺服系统的控制算法和参数,进一步提高系统的性能和稳定性。
总之,伺服系统的参数测试是非常重要的一项工作。
通过对伺服系统的参数进行测试和调试,可以进一步提高系统的性能和稳定性,满足不同领域的应用需求。
三菱伺服说明书MR-J2-B伺服放大器手册英文
三菱伺服说明书MR-J2-B伺服放大器手册英文三菱伺服说明书MR-J2-B伺服放大器手册(英文)8 - 1 Alarm and warning lists 报警和警告名单When a fault occurs during operation, the corresponding alarm or warning is displayed. If any alarm or warning has occurred, refer to Section 8.2 or 8.3 and take the appropriate s Warnings:当故障发生在操作过程中,相应的报警或显示警告。
如果任何警报或警告发生,请参阅第8.2或8.3,并采取适当的行动。
报警警告Display Name 显示名称10 Undervoltage 10欠压11 Board error 1 11 局错误112 Memory error 12内存错误113 Clock error 14时钟误差15 Memory error 2 15 内存错误216 Encoder error 1 16 编码器错误117 Board error 2 17局错误218 Board error 3 18局的错误320 Encoder error 2 20编码器错误224 Ground fault 24接地故障25 Absolute position erase 25绝对位置擦除30 Regenerative error 3 0再生错误31 Overspeed 31超速32 Overcurrent 32过流33 Overvoltage 33过压保护34 CRC error 34 CRC错误35 Command F T error 35指挥F t误差36 Transfer error 36传输错误37 Parameter error 37参数错误46 Servo motor overheat 46伺服电机过热50 Overload 1 50超载151 Overload 2 51超载252 Error excessive 52错误过多8E RS-232C error 8E型的RS - 232错误88 Watchdog 88看门狗92 Open battery cable warning 92打开电池电缆警告96 Zero setting error 96零设定错误过度负荷的E0 Excessive regenerative load warning E0再生警告E1 Overload warning E1超载警告E3 Absolute position counter warning E3展绝对位置计数器警告E4 Parameter warning E4类参数警告E6 Servo emergency stop E6伺服紧急停止E7 Controller emergency stop E7的紧急停止控制器E9 Main circuit off warning E9主回路关闭警告。
伺服驱动器的常见故障及解决
伺服驱动器的常见故障及解决伺服驱动器常用于掌握伺服电机,在需要高精度的定位系统中,伺服驱动器是伺服系统中很重要的一部分。
在自动化应用中,伺服驱动器一些常见故障以及处理方式。
1LED灯是绿的,但是电机不动故障缘由一:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT和-INHIBIT端口。
故障缘由二:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
2上电后,驱动器的LED灯不亮故障缘由:供电电压太低,小于*小电压值要求。
处理方法:检查并提高供电电压。
3当电机转动时,LED灯闪耀故障缘由一:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
故障缘由二:HALL传感器故障。
处理方法:当电机转动时检测HallA,HallB,HallC的电压。
电压值应当在5VDC和0之间。
4LED灯始终保持红色故障缘由:存在故障。
处理方法:缘由:过压、欠压、短路、过热、驱动器禁止、HALL无效。
5电机失速故障缘由一:速度反馈的极性搞错。
处理方法:可以尝试以下方法:a.假如可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENCA和ENCB对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
故障缘由二:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能供应足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
6电机在一个方向上比另一个方向跑得快故障缘由一:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
故障缘由二:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
故障缘由三:偏差电位器位置不正确。
处理方法:重新设定。
7示波器检查驱动器的电流监控输出端时,发觉它全为噪声,无法读出故障缘由:电流监控输出端没有与沟通电源相隔离(变压器)。
伺服系统的故障诊断与排除方法
伺服系统的故障诊断与排除方法概述该文档旨在提供一些关于伺服系统故障诊断和排除方法的指导,以帮助解决伺服系统故障。
本文档适用于那些具备一定电子和机械知识的技术人员。
请在尝试任何维修工作之前确保断开电源,并阅读相关设备的操作手册。
故障现象在进行故障诊断和排除之前,我们需要了解伺服系统可能出现的一些常见故障现象。
以下是一些可能的故障现象:1. 伺服系统无法启动或无法正常运行。
2. 伺服系统运行时出现异常噪音或振动。
3. 伺服系统无法实现准确的位置控制。
4. 伺服系统无法实现所需的速度或加速度。
5. 伺服系统无法同时控制多个轴。
故障诊断步骤以下是一些故障诊断和排除步骤,可帮助您找到伺服系统故障的根本原因。
1. 检查电源供应:确保伺服系统的电源供应可靠并且符合规格要求。
2. 检查电缆连接:检查所有电缆连接是否牢固且正确连接,避免松脱或者损坏的连接。
3. 检查电机和传感器:检查伺服驱动器、电机和传感器是否正常工作。
确保没有损坏或磨损的部件。
4. 测试控制信号:使用示波器或多用途测试仪检查控制信号的是否正确发送和接收。
5. 检查程序和参数设置:确认伺服系统的程序和参数设置是否正确。
特别注意位置和速度控制相关的参数设置。
6. 执行故障排除程序:根据设备操作手册中提供的故障排除程序,一步步地检查可能的故障原因并进行修复。
7. 寻求专业帮助:如果您无法准确地确定伺服系统故障的原因或无法自行修复,请及时寻求专业技术支持。
安全注意事项在进行伺服系统的故障诊断和排除工作时,请务必遵守以下安全注意事项:1. 断电:在进行任何维修和检查之前,确保伺服系统的电源已经断开,以防止电击和其他安全事故。
2. 绝缘保护:使用绝缘工具和绝缘手套来防止触电。
3. 防止意外启动:在进行工作时,确保伺服系统的控制器和驱动器没有意外启动的风险。
结论本文档提供了有关伺服系统故障诊断和排除方法的基本指导。
根据具体情况和设备要求,可能需要采取其他特定的措施。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
在维修之前,请记下产品型号,就是以“CACR”开头的那串数字
2
在出现故障后,如果不是十分涉及到安全问题的时候,不要急于
关闭电源,可以检查一下报警灯以及状态灯的显示,并记录下来。
以便更快速的做出判断。如果把电源关掉了,这些报警信息也就
看不到了。
对照故障代码,可以快速判断出是哪里出了问题,共11个代码
3
4
5
当要实用万用表检查实际的电路时,一定要断开电源
不上电的静态测量,一般是使用万用表的二极管档位
这个档位可以更好的检测GTR、SCR、DIODE、TRANSISTOR等电力
电子器件。很多书籍都是介绍的用电阻档位,不过测量起来不是那么
如意,不知道这些书甚至说明书都是怎么搞的。
当然测量其它元器件也是有很多要用到电阻档位的。
6
检查以上各个部件,多数要使用二极管档位,并注意正反向表笔
7
2极断路器
整流桥2
功率晶体管模块
电解电容 滤波电容模块 U与V相电流互感器模块 晶闸管整流模块再生用晶体管 刹车用整流桥1
刹车用晶闸管
电阻模块
- 8 -
如果电源的断路器跳闸了,最好不要再合闸,先检查清楚
上面写的是如何用万用表检测端子,因为端子连着电路以及元器件
并写明了哪个端子是用红表笔还是黑表笔,请注意
- 9 -
电容器的正极和负极可以直接看做直流回路的正与地端
- 10 -
端子排列和定义
万用表检测结果对照
- 11 -
再生晶体管的检查,以及B、C、E各极的顺序请看上图
- 12 -
三相整流桥的引脚
- 13 -
单相整流桥1 共阴极双二极管 当然有的时候用的是
整流桥,都可以
- 14 -
刹车用的晶闸管,并注意引脚与所测量的参数对照
- 15 -
电阻模块,如果保持好的话,上面还有电路图呢,可以看到电路与引脚间阻值
- 16 -
三相整流模块,但是这个是“有一半电路是晶闸管”的半控模块
- 17 -
2008年3月24日 完成
再生电阻
冷却风扇
不同的型号的机器,对应
不同的阻值