FANUC 常用文字码及其含义
Fanuc数控车床G代码及M指令
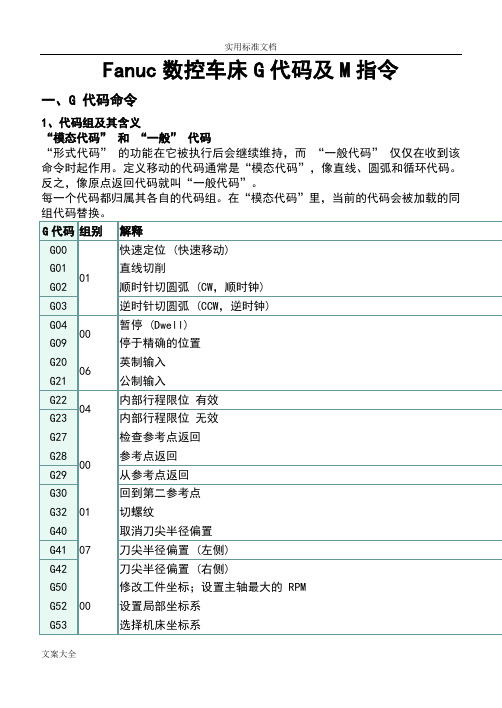
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码”和“一般”代码“形式代码”的功能在它被执行后会继续维持,而“一般代码”仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
2. 举例①绝对坐标系程序G02 X100. Z90. I50. K0. F0.2或G02 X100. Z90. R50. F02;②增量坐标系程序G02 U20. W-30. I50. K0. F0.2;或G02 U20. W-30. R50. F0.2;G30 第二原点返回 (G30)坐标系能够用第二原点功能来设置。
数控机床FANUC操作手册

.数控机床FANUC操作手册一、操作指令1、地址表格:地址释义最小到最大之数量O 程序编号 0001——9999N 段之编号 0001——9999G 动作模式 00——990.001——99999.999(毫米)X、Y、Z 工作轴0.0001——3937.0078(英寸)0.001——99999.999(毫米)R 圆之半径0.0001——3937.0078(英寸).001——99999.999(毫米)I、J、K 刀与圆中之距离0.0001——3937.0078(英寸)F 进刀速度1——15000毫米/分S 主轴旋转速度1——5000转/分(跟据机床定)M 开关控制 00——99H、D 补偿编号 01——32(64,100,200)P、X 停留时间0——99999.999秒P 子程序编号或段之编号的指定 0001——9999L 执行子程序或钻孔的次数, 00——99P、Q、R 钻孔是之变数2、段的跳过指令当在段之前加上符号“/”及开动此动作效能按钮时(OPTIONAL BLOCK SKIP)此段指令将不被执行。
二、G 功能G功能是由地址G加上资料两位数值之数码以组成的指令,而不同资料之数值之数码则代表不同指令。
G指令之功能大至分为两种(一)、G指令只有效于其出现之一段中,而无效于其他。
(二)、G指令一经执行便有效至别一G指令出现为止。
1、G指令功能表组别G指令功 能G00 位置快速移动指令G01 直线切削指令01G02 顺时圆弧切削指令G03 逆时圆弧切削指令G04 暂停指令00G09 精密角位切削指令G10 补偿值设定,工作零点补偿值设定.G15 取消极坐标指令17G16 设定极坐标指令G17 指定X、Y平面02G18 指定Z、X平面G19 指定Y、Z平面G20 英制单位输入06G21 公制单位输入G22 软体行程极限“开”04G23 软体行程极限“关”G28 归回机械基准原点G29 从机械原点到指定点00G30 归回第二、第三及第四机械原点G31 跳段指令G40 刀具补偿取消07G41 刀具左方向补偿G42 刀具右方向补偿G43 刀具长度正方向补偿08G44 刀具长度负方向补偿G49 刀具长度补偿取消G45 刀具位置增加一倍补正值G46 刀具位置减少一倍补正值G47 刀具位置增加二倍补正值00G48 刀具位置减少二倍补正值G52 设定局部坐标系G53 设定机械坐标系G50 比例“关”11G51 比例“开”G54 第一工作坐标系设定G55 第二工作坐标系设定G56 第三工作坐标系设定14G57 第四工作坐标系设定G58 第五工作坐标系设定G59 第六工作坐标系设定00 G60 单方向位置移动G61 精密角位切削指令15G64 正常切削指令00 G65 商户巨指令单次呼叫G66 商户巨指令模式呼叫12G67 商户巨指令呼叫取消G68 座标旋转16G69 座标旋转取消G73 高速步进钻削循环(啄法钻孔)09G74 左螺纹攻丝循环(攻牙)G76 精搪孔循环(精密搪孔)G80 取消73、74、76、81至89之指令G81 钻孔循环(直法钻孔)G82 盲孔钻孔循环(直法钻孔)G83 步进钻孔循环(啄法钻孔)G84 右螺纹攻丝循环(攻牙)G85 铰孔循环(搪孔)G86 搪孔循环(搪孔)G87 反搪孔循环(反向搪孔)G88 手动退刀盲孔搪孔循环G89 盲孔铰孔循环G90 设定绝对坐标系03G91 设定相对坐标系00 G92 设定工作坐标系G94 速度以每分钟所进刀之距离计算05G95 速度以每转所进刀之距离计算G98 在完成钻孔后返回原来之高度10G99 在完成钻孔后返回指定点R之高度三、M功能M功能是由地址M加上资料两位数值之数码以组成的指令,而M功能多为开关之用。
FANUC数控系统常用M代码:【范本模板】
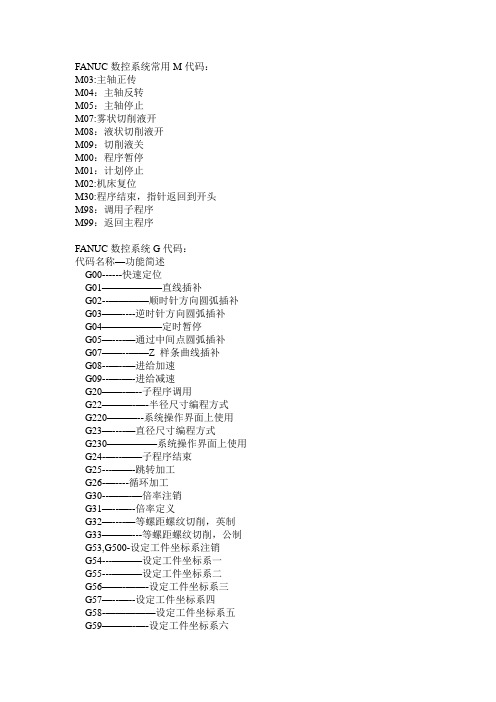
FANUC数控系统常用M代码:M03:主轴正传M04:主轴反转M05:主轴停止M07:雾状切削液开M08:液状切削液开M09:切削液关M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头M98:调用子程序M99:返回主程序FANUC数控系统G代码:代码名称—功能简述G00------快速定位G01——————直线插补G02--————顺时针方向圆弧插补G03——----逆时针方向圆弧插补G04——————定时暂停G05—----—通过中间点圆弧插补G07——--——Z 样条曲线插补G08--—--—进给加速G09--—-—-进给减速G20——-—--子程序调用G22———-—-半径尺寸编程方式G220———--系统操作界面上使用G23—----—直径尺寸编程方式G230—————系统操作界面上使用G24-—--——子程序结束G25---——-跳转加工G26-—----循环加工G30--——-—倍率注销G31—--—--倍率定义G32—----—等螺距螺纹切削,英制G33———---等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54---———设定工件坐标系一G55---———设定工件坐标系二G56——-——-设定工件坐标系三G57—--—--设定工件坐标系四G58-—————设定工件坐标系五G59———-—-设定工件坐标系六G60-————-准确路径方式G64—-—-——连续路径方式G70—-——--英制尺寸寸G71--————公制尺寸毫米G74————-—回参考点(机床零点)G75-—-——-返回编程坐标零点G76--—-—-返回编程坐标起始点G81———--—外圆固定循环G331——--—螺纹固定循环G90--——--绝对尺寸G91-----—相对尺寸G92————-—预制坐标G94-——---进给率,每分钟进给G95———-——进给率,每转进给功能详细:G00-快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置.移动过程中不得对工件进行加工。
最新fanuc数控铣床GM功能代码全解

最新fanuc数控铣床GM功能代码全解
态。
2 . 不同组的G代码可以在同一程序段中指定;如果在同一程序段中指定同组G 代码,.最后指定的G代码有效。
3.由于电源打开或重置,使系统被初始化时,已指定的G20或G21代码保持有效.
4.由于电源打开被初始化时,G22代码被激活;由于重置使机床被初始化时, 已指定的G22或G23代码保持有效.
编码字符的意义
字符意义
A 关于X轴的角度尺寸
B 关于Y轴的角度尺寸
C 关于Z轴的角度尺寸
D 刀具半径偏置号
E 第二进给功能(即进刀速度,单位为mm/分钟)
F 第一进给功能(即进刀速度,单位为mm/分钟)
G 准备功能
H 刀具长度偏置号
I 平行于X轴的插补参数或螺纹导程
J 平行于Y轴的插补参数或螺纹导程
L 固定循环返回次数或子程序返回次数
M 辅助功能
N 顺序号(行号)
O 程序编号
P 平行于X轴的第二尺寸或固定循环参数
Q 平行于Y轴的第三尺寸或固定循环参数
R 平行于Z轴的第三尺寸或循环参数圆弧的半径
S 主轴速度功能(表标转速,单位为转/分)
T 第一刀具功能
U 平行于X轴的第二尺寸
V 平行于Y轴的第二尺寸
W 平行于Z轴的第二尺寸
X 基本尺寸
Y 基本尺寸
Z 基本尺寸
FANUC数控系统的准备功能M代码及其功能。
FANUC数控系统常用M代码

FANUC数控系统常用M代码: M03:主轴正传M04:主轴反转M05:主轴停止M07:雾状切削液开M08:液状切削液开M09:切削液关M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头M98:调用子程序M99:返回主程序FANUC数控系统G代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详细:G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
FANUC数控G代码常用M代码

FANUC数控G代码,常用M代码FANUC数控G代码,常用M代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序完毕G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点) G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进展加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
FANUC机器人故障代码解释及应...
FANUC机器人故障代码解释及应...(1)SRVO–093 WARN SPMAL alarm (Track enc : i)解释:当脉冲编码器的当前位置数据高于以前的位置数据时该警报发生。
参见警报(SRVO–090)的描述。
(2)SRVO–094 WARN PMAL alarm (Track enc : i)解释:可能是脉冲编码器异常。
参见 PMAL 警报 (SRVO–072)的描述。
(3)SRVO–095 WARN CMAL alarm (Track enc : i)解释:可能是脉冲编码器异常或是脉冲编码器的故障导致噪声。
参见 CMAL 警报(SRVO–073)的描述。
(措施 1):强化脉冲编码器的法兰盘的接地(措施 2):替换脉冲编码器(4)SRVO–096 WARN LDAL alarm (Track enc : i)解释:脉冲编码器上的 LED 指示灯故障。
参见 LDAL 警报 (SRVO–074)的描述。
(5)SRVO–097 WARN Pulse not established (enc : i)解释:尚未确定脉冲编码器的绝对位置。
参见 SRVO–075 警报的描述,脉冲未建立。
(措施 1):复位报警,点动报警轴直到相同的报警不再出现为止(6)SRVO–105 SVAL1 Door open or E–stop解释:控制柜门被打开。
-如果有安装门开关:(措施 1):当控制柜门已被打开,则关闭它。
(措施2):检查门开关和门开关的连接电缆。
如是开关或电缆故障,替换它们。
-如果没有安装门开关:(措施 3):检查紧急停止单元的 CRM72、 CRM95、CRM96 是否安全连接。
(措施 4):替换紧急停止单元。
(措施 5):替换伺服放大器。
(措施 6):替换面板电路板。
(措施 7):检查面板电路板和急停单元之间的电缆。
注意:B 型控制柜没有门开关以上就是全部操作步骤,有什么不明白的可以在评论区提问。
FANUC系统__G__M功能代码
FANUC系统G M 代码(α -T14/21iFb)G 代码G62自动转角进给率调整G65指令呼出( P_指令番号 ,L_呼出次数)G00快速定位G66指令程式呼出 A(P_L_ )G01直线插补(F_ )G66.1指令程式呼出 B(P_L_ )G02圆弧插补 CW (顺时针)G67指令程式呼出取消G03圆弧插补 CCW (逆时针)G68坐标回转 /三维坐标转换有效G02.3指数函数补间正转G69坐标回转 /三维坐标转换取消G03.3指数函数补间逆转G72.1旋转拷贝(P_L_R_ )G04暂停 / 精确停止 (X_P_;)G72.2平移拷贝(P_L_R_ )G05 1.AI 轮廓控制Ⅰ2.AI 轮廓控制Ⅱ 3. 纳米平滑插补(Q_)G73深穴钻铣循环(P_Q_R_F_K_ )G05.4HRV3 (高响应矢量控制3) ON/OFFG74逆攻牙循环(P_Q_R_F_K_ )G06.2NURBUS插补(P_R_K_F_;)G75使用者固定循环G07.1圆筒补间G76镜镗循环(P_Q_R_F_K_ )G09正确停止检查G80固定循环取消G10程式参数输入 /补正输入G81固定循环(钻孔循环 /中心镗)G11程式参数输入取消G82固定循环(钻铣循环 /逆镗循环)G15极坐标指令取消G83固定循环(深钻孔)G16极坐标指令有效G84固定循环(攻牙)G17平面选择X-YG85固定循环(镗孔循环)G18平面选择Y-ZG86固定循环(镗孔循环)G19平面选择X-ZG87固定循环(回退镗孔循环)G20英制指令G88固定循环(镗孔)G21公制指令G89固定循环(镗孔)G22设定行程范围功能ONG90绝对值指令G23设定行程范围功能OFFG91增量值指令G27原点复归确认G92工作坐标系设定G28参考原点复归G92.1工作坐标系预定G29开始点复归G93逆时针进给G30第 2~4 参考点复归( P_:基准点的选择)G94非同期进给 (每分进给 )G31跳跃机能G95同期进给 (每回转进给 )G33螺纹切削G98固定循环起始点复归G37自动刀具长测定G99固定循环R 点复归G38刀具径补正矢量保持G107圆筒补间G39刀具径补正转角圆弧补正G40刀具径补正取消G41刀具径补正左G41.2三维刀具半径补偿左侧(类型1)M 代码G41.3三维刀具半径补偿左侧(前角偏置)G41.4三维刀具半径补偿左侧(类型1)M00程式停止(暂停)G41.5三维刀具半径补偿左侧(类型1)M01程式选择性停止G41.6三维刀具半径补偿左侧(类型2)M02程序结束(顺时针方向 )G42刀具径补正右M03主轴正转(逆时针方向 )G42.2三维刀具半径补偿右侧(类型1)M04主轴反转G42.3三维刀具半径补偿右侧(前角偏置)M05主轴停止G42.4三维刀具半径补偿右侧(类型1)M06自动刀具交换G42.5三维刀具半径补偿右侧(类型1)M07吹气启动G42.6三维刀具半径补偿右侧(类型2)M08切削液启动G43刀具长设定( +)M09切削液关闭 /吹起关闭G43.4刀尖控制(类型 1)M10第 4轴夹紧G43.5刀尖控制(类型 2)M11第 4轴松开G44刀具长设定( -)M12停止预读的 M 码G45刀具位置设定(扩张)M13主轴加速器内马达顺时针旋转(C_)G46刀具位置设定(缩小)M14主轴加速器内马达逆时针旋转(C_)G47刀具位置设定(二倍)M15主轴加速器内马达停止旋转(C_)G48刀具位置设定(减半)M16更换刀具时 DDR 高速定位G49刀具长度补偿 /刀具前端点控制取消M17接触式探头电源 ONG50比例缩放取消( P_ 缩放倍率)M18接触式探头电源OFFG51比例缩放有效M19主轴定位G50.1编程镜像取消M20中心贯穿剂用泵停止G51.1编程镜像有效M21中心贯穿剂用泵运转G52局部坐标系设定M22从刀具端部喷出冷却剂G53机械坐标系选择M23从刀具端部吹气G54工件坐标系选择 1M24中心贯穿切削液 /吹气停止G55工件坐标系选择 2M25G56工件坐标系选择 3M26刀具锥度部清洗装置功能有效G57工件坐标系选择 4M27刀具锥度部清洗装置功能无效G58工件坐标系选择 5M28小径深穴钻孔加工循环模式ONG59工件坐标系选择 6M29刚性攻牙(S_主轴转速)G54.1工件坐标系选择扩张48组M30程式结束G54.2旋转工作台动态固定偏置(P_偏置编号)M31加工模式设定(L1~L6 )G60单向定位M32开始进行 AI 刀具监视功能的无负荷检查G61精确停止模式M33AI 刀具监视功能的无负荷检查的判定- 1 -FANUC系统G M 代码(α -T14/21iFb)M34AI 刀具监视功能的无负荷检查结束编码字符的意义M35字符意义M36 A 关于 X 轴的角度尺寸M37 B 关于 Y 轴的角度尺寸M38探头异常检查开始 C 关于 Z 轴的角度尺寸M39探头异常检查结束 D 刀具半径偏置号M40AI 刀具监视功能无效 E 第二进给功能(即进刀速度,单位M41AI 刀具监视功能有效为 mm/ 分钟)M42 F 第一进给功能(即进刀速度,单位M43报警显示用 M 码为 mm/ 分钟)M44设定 AI 刀具监视器各参数G 准备功能M45H 刀具长度偏置号M46I 平行于 X 轴的插补参数或螺纹导程M47RAPID TRAVERSE OVERRIDE SETTING ?J 平行于 Y 轴的插补参数或螺纹导程M48L 固定循环返回次数或子程序返回M49次数M50鼓风机ON M 辅助功能M51N 顺序号(行号)M52安全门(侧门)关O 程序编号M53安全门(侧门)开P 平行于 X 轴的第二尺寸或固定循M54环参数M55Q 平行于 Y 轴的第三尺寸或固定循M56环参数M57R 平行于 Z 轴的第三尺寸或循环参M58数圆弧的半径M59S 主轴速度功能(表标转速,单位为M60自动门开并向外部设备输出信号转/分)M61自动门开并向外部设备输出信号T 第一刀具功能M62自动门开并向外部设备输出信号U 平行于 X 轴的第二尺寸M63自动门开并向外部设备输出信号V 平行于 Y 轴的第二尺寸M64自动门开并向外部设备输出信号W 平行于 Z 轴的第二尺寸M65自动门开并向外部设备输出信号X 基本尺寸M66主轴加速器检出模式ON Y 基本尺寸M67主轴加速器检出模式OFF Z 基本尺寸M68第 5轴夹紧M69第 5轴松开M70M71第4轴夹紧M72第4轴松开M73X 轴镜像功能开M74Y 轴镜像功能开M75M76第 4 轴镜像功能开M77镜像功能关M78连接主轴加速器M79断开主轴加速器M80用于外部接口M81用于外部接口M82用于外部接口M83用于外部接口M84用于外部接口M85用于外部接口M86用于外部接口M87用于外部接口M88用于外部接口M89用于外部接口M90M91将产品数量计入计数器1M92将产品数量计入计数器2M93M94M95M96用户宏指令加入功能(P_ 指令番号) ONM97用户宏指令加入功能OFFM98调用子程序M99子程序结束M198调用外部子程序- 2 -。
FANUC常见报警的解释
1.分解角度①角度正负值。
②上为A③下为A◆①刀具G40/G41/G42②外径G42刀尖R方位3号,G42右到左直线A180.度。
G41左到右0。
度③镗内径G41刀尖R方位2号(刀反装).正装G42方位3号.④铣六方/方位9号。
R为铣刀二分之一。
⑤外径刀反装从右到左用G42方位4号.●G41为左。
沿进给方向观察,刀具处于工件左侧。
G42为右,沿进给方向观察,刀具处于工件右侧。
螺纹格式一、代码格式①G32XZF ;回后退功能无效。
②G34ZFK;K[+-]0.001-500.mm范围~回退功能无效。
双头螺纹例:G32W-30.F4.0Q0G32W-30.F4.0Q180000起始角不是模值,不指定则为0。
(Q为螺纹的起始角,增量为0。
001度)不能指定小点。
●;锥螺纹标准法为正+R法。
‘bb●多线螺纹,每次移二分之一。
1.定位点螺距。
例:G0Z2。
02.G0XZF1。
03.G0Z2。
54.。
5.G0Z2。
756.。
7.M05;M30;G90/G92/G9 4相同1.车管螺纹格式:主轴转速S20-S50:1.例子:G01X10。
;2.G04X0。
25;3.G32Z-10。
F2。
0;4.G04X0。
25;5.G32X9。
0Z2。
F2。
;2.三针测量法;用三根钢针放在螺纹槽宽。
再用千分尺测量外径。
●角度A/公式d.1.A60。
度`d=M-3*D+0.866*P2.A55。
度`d=M-3.1657*D+0.9605*P3.A30。
度`d=M-4.864*D+1.866*P4.A29。
度d=M-4.99*D+1.933*P`●尺所量的尺寸●D钢针直;;;d------螺纹中径●M千分尺---工件加钢-径●P螺纹的螺距。
1.A60。
度D=0。
577*P2.A55。
度D=0。
564*P3.A30。
度D=0。
518*P4.A29。
度D=0。
516*P●单针法1.A60。
d=M-1。
5*D+0。
108*P+0。
5d*2.A55。
FANUC数控系统常用M代码
FANUC数控系统常用M代码:M03:主轴正传M04:主轴反转M05:主轴停止M07:雾状切削液开M08:液状切削液开M09:切削液关M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头M98:调用子程序M99:返回主程序FANUC数控系统G代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详细:G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表4.3 常用文字码及其含义————【G2/G3 :圆弧插补指令】刀具从现处位置沿圆弧轨迹移动至圆弧终点。
移动的速度由进给速度F指令指定。
编程格式:XY平面圆弧:G2或G3 X — Y — R — F—X — Y—:为圆弧的终点位置坐标。
R—:圆弧的半径。
F—:为刀具移动的速度,即切削进给速度。
G2 —:顺时针圆弧插补。
G3 —:逆时针圆弧插补。
G2/G3 :圆弧插补指令应用将执行动作:刀具从现处位置C点沿CD之间的圆弧轨迹移移动至圆弧终点D。
CD段圆弧是一段顺时针圆弧轨迹,所以用G2指令。
加工程序:绝对坐标编程:N80 G90 G2 X63.0 Y20.0 R23.0相对坐标编程:N80 G91 G2 X23.0 Y-23.0 R23.0 F100平面的选择:数控系统一般可以加工XY、XZ、YZ平面的圆弧。
G17:该指令表示选择XY平面,在此平面中进行圆弧插补和刀具补偿。
此代码为系统初始代码。
电源一接通G17 就作为平面选择的起始代码而自动生效。
G18:该指令表示选择XZ平面,在此平面中进行圆弧插补和刀具补偿。
G19:该指令表示选择YZ平面,在此平面中进行圆弧插补和刀具补偿。
选择性单节删除:”/”在单节的最前端加一斜线"/"(选择性单节删除指令)时,该单节是否被执行,是由执行操作面板上的选择性单节删除开关来决定。
当此开关处于"ON"(灯亮),则该单节会被忽略而不被执行;当此开关处于 "OFF" (灯熄),则该单节会被执行。
所以程序中有"/"指令之单节可由操作者视情况选择该单节是否被执行。
例子:N1;=>粗铣外形:/M00;N2;=>粗铣凹槽:/M00;N3;=>精铣外形:/M00;N4;=>精铣凹槽以上例子,当单节删除开关处于"ON"时,则所有的M00(程序停止指令)皆不被执行。
反之设于 "OFF" ,则全部执行。
"/"指令常置于单节的最前端,若是置于单节中的任何位置,则从 "/" 至";"(单节结束)间之所有指令皆被忽略不执行。
若含有"/"指令的单节被读入缓冲暂存区后,再将单节删除开关 "ON" ,则此单节因已被辨认正确无误,故会被执行。
坐标系旋转功能-G68、G69FANUC-0MC该指令可使编程图形按照指定旋转中心及旋转方向旋转一定的角度,G68表示开始坐标系旋转,G69用于撤消旋转功能。
1、基本编程方法编程格式:G68 X ~ Y ~ R ~......G69式中:X、Y――旋转中心的坐标值(可以是X、Y、Z中的任意两个,它们由当前平面选择指令G17、G18、G19中的一个确定)。
当X、Y省略时,G68指令认为当前的位置即为旋转中心。
R--旋转角度,逆时针旋转定义为正方向,顺时针旋转定义为负方向。
当程序在绝对方式下时,G68程序段后的第一个程序段必须使用绝对方式移动指令,才能确定旋转中心。
如果这一程序段为增量方式移动指令,那么系统将以当前位置为旋转中心,按G68给定的角度旋转坐标。
现以图4.29为例,应用旋转指令的程序为:N10 G92 X-5 Y-5 //建立图4.29所示的加工坐标系N20 G68 G90 X7 Y3 R60 //开始以点(7,3)为旋转中心,逆时针旋转60°的旋转N30 G90 G01 X0 Y0 F200 //按原加工坐标系描述运动,到达(0,0)点(G91 X5 Y5) //若按括号内程序段运行,将以(-5,-5)的当前点为旋转中心旋转60°N40 G91 X10 //X向进给到(10,0)N50 G02 Y10 R10 //顺圆进给N60 G03 X-10 I-5 J-5 //逆圆进给N70 G01 Y-10 //回到(0,0)点N80 G69 G90 X-5 Y-5 //撤消旋转功能,回到(-5,-5)点M02 //结束2、坐标系旋转功能与刀具半径补偿功能的关系旋转平面一定要包含在刀具半径补偿平面内。
以图4.30为例:N10 G92 X0Y0N20 G68 G90 X10 Y10 R-30N30 G90 G42 G00 X10 Y10 F100 H01N40 G91 X20N50 G03 Y10 I-10 J 5N60 G01 X-20N70 Y-10N80 G40 G90 X0 Y0N90 G69 M30图4.30 坐标旋转与刀具半径补偿当选用半径为R5的立铣刀时,设置:H01=5。
3、与比例编程方式的关系在比例模式时,再执行坐标旋转指令,旋转中心坐标也执行比例操作,但旋转角度不受影响,这时各指令的排列顺序如下:G51… …G68… …G41/G42… …G40… …G69… …G50… …刀具半径补偿功能刀具半径补偿指令 G40,G41,G42刀具半径补偿指令格式如下:G17 G41(或G42) G00(或G01) X Y D或G18 G41(或G42) G00(或G01) X Z D或G19 G41(或G42) G00(或G01) Y Z D;G40(a) (b)图6.1 刀具补偿方向G41是相对于刀具前进方向左侧进行补偿,称为左刀补。
如图6.1a所示。
这时相当于顺铣。
G42是相对于刀具前进方向右侧进行补偿,称为右刀补。
如图6.2b所示。
这时相当于逆铣。
从刀具寿命、加工精度、表面粗糙度而言,顺铣效果较好,因此G41使用较多。
D是刀补号地址,是系统中记录刀具半径的存储器地址,后面跟的数值是刀具号,用来调用内存中刀具半径补偿的数值。
刀补号地址可以有D01-D99共100个地址。
其中的值可以用MDI方式预先输入在内存刀具表中相应的刀具号位置上。
进行刀具补偿时,要用G17/G18/G19选择刀补平面,缺省状态是XY平面。
G40是取消刀具半径补偿功能,所有平面上取消刀具半径补偿的指令均为G40。
G40,G41,G42是模态代码,它们可以互相注销。
使用刀具补偿功能的优越性在于:²在编程时可以不考虑刀具的半径,直接按图样所给尺寸进行编程,只要在实际加工时输入刀具的半径值即可。
²可以使粗加工的程序简化。
利用有意识的改变刀具半径补偿量,则可用同一刀具、同一程序、不同的切削余量完成加工。
下面结合图6.2来介绍刀补的运动。
图6.2 刀补动作按增量方式编程:O0001N10 G54 G91 G17 G00 M03 G17指定刀补平面(XOY平面)N20 G41 X20.0 Y10.0 D01 建立刀补(刀补号为01)N30 G01 Y40.0 F200N40 X30.0N50 Y-30.0N60 X-40.0N70 G00 G40 X-10.0 Y-20.0 M05 解除刀补N80 M02按绝对方式编程:O0002N10 G54 G90 G17 G00 M03 G17指定刀补平面(XOY平面)N20 G41 X20.0 Y10.0 D01 建立刀补(刀补号为01)N30 G01 Y50.0 F200N40 X50.0N50 Y20.0N60 X10.0N70 G00 G40 X0 Y0 M05 解除刀补N80 M02刀补动作为:1、启动阶段2、刀补状态3、取消刀补这里特别提醒要注意的是,在启动阶段开始后的刀补状态中,如果存在有两段以上的没有移动指令或存在非指定平面轴的移动指令段,则可能产生进刀不足或进刀超差。
其原因是因为进入刀具状态后,只能读出连续的两段,这两段都没有进给,也就作不出矢量,确定不了前进的方向。
刀具长度补偿G43、G44、G49刀具长度补偿指令格式如下:格式:G43(G44) Z H其中: Z为补偿轴的终点值。
H为刀具长度偏移量的存储器地址。
把编程时假定的理想刀具长度与实际使用的刀具长度之差作为偏置设定在偏置存储器中,该指令不改变程序就可以实现对Z轴(或X、Y轴)运动指令的终点位置进行正向或负向补偿。
使用G43指令时,实现正向偏置;用G44指令时,实现负向偏置。
无论是绝对指令还是增量指令,由H代码指定的已存入偏置存储器中的偏置值在G43时加,在G44时则是从Z轴(或X、Y轴)运动指令的终点坐标值中减去。
计算后的坐标值成为终点。
取消长度补偿指令格式:G49 Z(或X或Y)实际上,它和指令G44/G43 Z H00的功能是一样的。
G43、G44、G49为模态指令,它们可以相互注销。
下面是一包含刀具长度补偿指令的程序,其刀具运动过程如图6.3所示。
图6.3 刀具长度补偿加工H01=-4.0(偏移值)N10 G91 G00 X120.0 Y80.0 M03 S500;N20 G43 Z-32.0 H01;N30 G01 Z-21.0 F1000;N40 G04 P2000;N50 G00 Z21.0;N60 X30.0 Y-50.0;N70 G01 Z-41.0;N80 G00 Z41.0;N90 X50.0 Y30.0;N100 G01 Z-25.0;N110 G04 P2000;N120 G00 Z57.0 H00;N130 X-200.0 Y-60.0 M05 M03;由于偏置号的改变而造成偏置值的改变时,新的偏置值并不加到旧偏置值上。
例如,H01的偏置值为20.0,H02的偏置值为30.0时G90 G43 Z100.0 H01 Z将达到120.0G90 G43 Z100.0 H02 Z将达到130.0刀具长度补偿同时只能加在一个轴上,下面的指令将出现报警。
在必须进行刀具长度补偿轴的切换时,要取消一次刀具长度补偿。
G43 Z HG43 X H快速定位指令G00 ——数控铣床编程书写格式:GOO X____ Y____ Z____X、Y、Z:目标点坐标说明:①当Z轴按指令远离工作台时,先Z轴运动,再X、Y轴运动。
当Z轴按指令接近工作台时,先X、Y轴运动,再Z轴运动。
②不运动的坐标可以省略,省略的坐标轴不作任何运动。
③目标点的坐标值可以用绝对值,也可以用增量值。
④GOO功能起作用时,其移动速度为系统设定的最高速度。
编程实例:绝对值方式编程:G90 GOO X40. Y30.增量方式编程:G91 G00 X30. Y20.直线插补指令G01 ——数控铣床编程书写格式:G01 X____ Y____ Z____ F____X、Y:目标点坐标F:进给速度编程实例:绝对值方式编程:G01 X40. Y30. F300增量值方式编程:G91 G01 X30. Y20. F300平面选择指令G17、G18、G19 ——数控铣床编程平面选择G17、G18、G19指令分别用来指定程序段中刀具的插补平面和刀具半径补偿平面。