坐标方位角和象限角的概念
矿图基本知识

我国常见高程系统及其换算关系 1985国家高程=1956年黄海高程-0.029(米) 1985国家高程=吴凇高程-1.717(米) 1985国家高程=珠江高程+0.557(米) 1985国家高程=废黄河高程-0.19(米) 1985国家高程=大沽高程-1.163(米) 1985国家高程=渤海高程+3.048(米)
地心坐标系是以地球质心为原点建立的空间直 角坐标系,或以球心与地球质心重合的地球椭 球面为基准面所建立的大地坐标系。 地心坐标系是在大地体内建立的O-XYZ坐标系。 原点O设在大地体的质量中心,用相互垂直的X, Y,Z三个轴来表示,X轴与首子午面与赤道面的 交线重合,向东为正。Z轴与地球旋转轴重合, 向北为正。Y轴与XZ平面垂直构成右手系。 通常分为地心空间直角坐标系(以x,y,z为其 坐标元素)和地心大地坐标系(以B,L,H为其坐 标元素)。
新的图形分幅与编号(数字图):
①1:100万的没有变化,只是不用连接号(J50) ②1:5000~1:50万比例尺的地图都是在1:100 万的基础上进行的,其编号由10个代码组成, 前3位是所在的1:100万地图的行号(1位)和列 号(2位),第4位是比例尺代码(每种比例尺有 一个特殊代码),后6位分为两段,前3位是图 幅行号,后3 位是图幅列号,不足3位时前面 加0。
7、高程系
1956年黄海高程系我国于1956年规定以黄海 (青岛)的多年平均海平面作为统一基面,叫 “1956年黄海高程系统”,为中国第一个国家 高程系统 。1956黄海高程水准原点的高程是 72.289米。 1985年国家高程基准以青岛验潮站1952年~ 1979年的潮汐观测资料为计算依据,叫“1985 国家高程基准” 1985国家高程系统的水准原 点的高程是72.260米。 习惯说法是“新的高程比旧的低0.029m",黄 海平均海平面是"新的比旧的高"。
2-3 测量学的基本知识(第3次)

1、方位角 2、象限角
三、坐标方位角的推算
一、直线定向的概念 确定直线与标准方向之间的关系称为直线 确定直线与标准方向之间的关系称为直线 标准方向 定向。 定向。
真子午线方向(真北 真子午线方向 真北) 真北
标 准 方 向
磁子午线方向(磁北 磁子午线方向 磁北) 磁北 坐标北方向(坐标北向 坐标北方向 坐标北向) 坐标北向
*主要考虑实用、经济
三、地形图符号
为便于测图和用图, 为便于测图和用图,用各种符号将实地的地物和地貌 在图上表示出来,这些符号总称为地形图图式( 符号总称为地形图图式 在图上表示出来,这些符号总称为地形图图式(GB/T 7929-1995) 7929-1995)。 图式是由国家统一制定的, 图式是由国家统一制定的,它是测绘和使用地形图的 重要依据和标准。 重要依据和标准。
某城市主要交通图 断面图
2、按成图方法分类
线划图: 线划图:
实地实测、 实地实测、线划描绘
影像图: 影像图:
采用彩色像片, 采用彩色像片,以其色彩影像表示
3、按成图介质分类
白纸地图 数字地图
二、图的比例尺
1.图的比例尺 1.图的比例尺
地图上任一线段的长度与地面上相应线段的水平长度 之比。 之比。
3.比例尺精度 3.比例尺精度
人用肉眼能分辨的最小距离一般为0.1mm,所以把图上 人用肉眼能分辨的最小距离一般为0.1mm,所以把图上 0.1mm所表示的实地水平距离称为比例尺精度,即: 0.1mm所表示的实地水平距离称为比例尺精度,即: 0.1mm× 0.1mm×M 举例:
比例尺 比例尺最 大精度 1:500
1:1000 1:2000 1:5000
工程测量名词解释
1. 测定:是指使用测量仪器和工具,通过测量和计算,得到一系列特征点的测量数据,或将地球表面的地物和地貌缩绘成地形图。
2. 测设:是指用一定的测量方法将设计图纸上规划设计好的建筑物位置,在实地标定出来,作为施工的依据。
3. 水准面:处处与重力方向线垂直的连续曲面。
4. 水平面:与水准面相切的平面。
5. 大地水准面:人们设想以一个静止不动的海水面延伸穿越陆地,形成一个闭合的曲面包围了整个地球称为大地水准面,即与平均海水面相吻合的水准面。
6. 铅垂线:重力的方向线称为铅垂线。
7. 绝对高程:地面点到大地水准面的铅垂距离。
8. 相对高程:地面点到假定水准面的铅垂距离。
9. 高差:地面两点间的高程之差。
10. 高差法:直接利用高差计算未知点高程的方法。
11. 视线高法(仪高法):利用仪器视线高程Hi计算未知点高程的方法。
12. 视线高:大地水准面至水准仪水平视线的垂直距离。
13. 水准管轴:通过水准管零点与其圆弧相切的切线。
14. 视准轴:十字丝交点与物镜光心的连线。
15. 视差:眼睛在目镜端上下移动,有时可看见十字丝的中丝与水准尺影像之间相对移动的现象。
16. 后视点:在同一测站中与前进方向相反的已知水准点。
17. 前视点:在同一测站中与前进方向相同的未知水准点。
18. 转点:在水准测量中起高程传递作用的点。
19. 水准点:用水准测量的方法测定的高程控制点。
20. 水准路线:在水准点间进行水准测量所经过的路线。
21. 闭合水准路线:从已知高程的水准点出发,沿各待定高程的水准点进行水准测量,最后又回到原出发点的环形路线。
22. 附合水准路线:从已知高程的水准点出发,沿待定高程的水准点进行水准测量,最后附合到另一已知高程的水准点所构成的水准路线。
23. 支水准路线:从已知高程的水准点出发,沿待定高程的水准点进行水准测量,是既不闭合又不附合的水准路线。
24. 高差闭合差:各测段高差代数和与其理论值的差值。
25. 水平测量测站校核:用变动仪器高法和双面尺法进行校核。
测量学名词解释

测量学名词解释:
1、大地水准面:设想一个与静止的平均海水面重合并延伸到大陆内部的包围整个地球的封闭的重力位水准面。
2、绝对高程:地面点沿垂线方向至大地水准面的距离。
3、方位角:地平坐标系的经向坐标,过天球上一点的地平经圈与子午圈所交的球面角。
4、等高线:地图上地面高程相等的各相邻点所连成的曲线。
5、测设:通过用一定的测量方法,按照要求的精度,把设计图纸上规划设计好的建筑物、构筑物的平面位置和高程在地面上标定出来,作为施工的依据。
6、地形图:表示地表上的地物、地貌平面位置及基本的地理要素且高程用等高线表示的一种普通地图。
25.水准点:沿水准路线每隔一定距离布设的高程控制点。
26.水准管轴:水准管两端一般刻有2mm间隔的刻画线,刻画线的中点s称为水准管零点,过零点且与水准管内壁圆弧相切的纵向直线L-L称为水准管轴。
27.水准管分划值:水准管两端一般刻有2mm间隔的刻画线
30.竖盘指标差:当经纬仪置平后,竖盘读数系统零位的偏差。
31.直线定线:在距离测量时,得到的结果必须是直线距离,若用钢尺丈量距离,
丈量的距离一般都比整尺要长,一次不能量完,需要在直线方向上标定一些点,
量工作。
直线定向及方位角测量

正 反 180
0
图形:正反方位角关系图及例题
1.正反方位角 X AB B AB BA
A Y
四、象限角
定义:从基本方向北端或南端量至直线的锐角 范围:0°~90° X a
Ⅳ
象限 象限角和坐标方位角 I I
Ⅱ
R a Y a
a=R a=180 °- R a=180 °+ R a=360 °- R
98 24
D
求 已知 180 右
B
90 06
90 18
BC AB 180 右
15106 180 9018 24048
81 12
C
CD BC 180 右
24048 180 8112 360 33936
δ
N N磁
γ
X
P B Y
S磁
S
磁偏角(magnetic declination)δ ——地面上同一点的真、 磁子午线方向不重合,其夹角称为磁偏角。磁子午线方向 在真子午线方向东侧,称为东偏,δ 为正。反之称为西偏, δ 为负。
子午线收敛角(mapping angle)γ ——当轴子午线方向在真 子午线方向以东,称为东偏,γ 为正。反之称为西偏,γ 为负。可见在中央子午线上,真子午线与轴子午线重合, 其他地区不重合,两者的夹角即为γ 。
Ⅲ Ⅳ
R
Ⅲ
R
Ⅱ
五、坐标方位角的计算
1、正反方位角 2、左右角 左角:水平角位于推算方向的左侧。记β 右角:水平角位于推算方向的右侧。记β
前进方向
左 右
正 反 1800
O
B
D
A
C
E
3、坐标方位角的计算公式
(整理)第七章 定向测量1
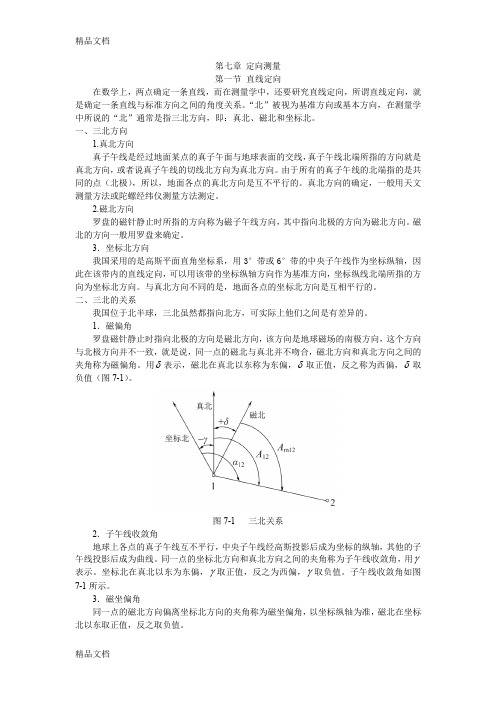
第七章定向测量第一节直线定向在数学上,两点确定一条直线,而在测量学中,还要研究直线定向,所谓直线定向,就是确定一条直线与标准方向之间的角度关系。
“北”被视为基准方向或基本方向,在测量学中所说的“北”通常是指三北方向,即:真北、磁北和坐标北。
一、三北方向1.真北方向真子午线是经过地面某点的真子午面与地球表面的交线,真子午线北端所指的方向就是真北方向,或者说真子午线的切线北方向为真北方向。
由于所有的真子午线的北端指的是共同的点(北极),所以,地面各点的真北方向是互不平行的。
真北方向的确定,一般用天文测量方法或陀螺经纬仪测量方法测定。
2.磁北方向罗盘的磁针静止时所指的方向称为磁子午线方向,其中指向北极的方向为磁北方向。
磁北的方向一般用罗盘来确定。
3.坐标北方向我国采用的是高斯平面直角坐标系,用3°带或6°带的中央子午线作为坐标纵轴,因此在该带内的直线定向,可以用该带的坐标纵轴方向作为基准方向,坐标纵线北端所指的方向为坐标北方向。
与真北方向不同的是,地面各点的坐标北方向是互相平行的。
二、三北的关系我国位于北半球,三北虽然都指向北方,可实际上他们之间是有差异的。
1.磁偏角罗盘磁针静止时指向北极的方向是磁北方向,该方向是地球磁场的南极方向,这个方向与北极方向并不一致,就是说,同一点的磁北与真北并不吻合,磁北方向和真北方向之间的夹角称为磁偏角。
用δ表示,磁北在真北以东称为东偏,δ取正值,反之称为西偏,δ取负值(图7-1)。
图7-1 三北关系2.子午线收敛角地球上各点的真子午线互不平行,中央子午线经高斯投影后成为坐标的纵轴,其他的子午线投影后成为曲线。
同一点的坐标北方向和真北方向之间的夹角称为子午线收敛角,用γ表示。
坐标北在真北以东为东偏,γ取正值,反之为西偏,γ取负值。
子午线收敛角如图7-1所示。
3.磁坐偏角同一点的磁北方向偏离坐标北方向的夹角称为磁坐偏角,以坐标纵轴为准,磁北在坐标北以东取正值,反之取负值。
方位角计算公式

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13) 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14) 设三点相关位置如图1-17()所示,应有=++-=+-(1-15) 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16) 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17) 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
测量学基础知识

测 量 员 手 簿一、测量工作的基本原则布局上:由整体到局部精度上:由高级到低级次序上:先控制后细部所有测量工作都必须遵循以上原则,也是测量的工作次序。
二、控制测量的程序由整体到局部由高级到低级先控制后细部三、确定地面点位的三个基本要素水平距离:S水平夹角:β高 差:h称为三个基本观测量在测量过程中应遵循“随时检查、杜绝错误”的原则。
测量的三项基本工作:距离测量、角度测量、高差测量。
坐标系统:国家三角测量采用1980年西安坐标系统。
平面坐标系统:国家三角测量平面坐标系统采用高斯--克吕格平面坐标系统.三 角 函 数邻边与斜边的比叫做余弦,记作cos cos=邻边/斜边对边与邻边的比叫做正切,记作tan tan=对边/邻边对边与斜边的比叫做正弦,记作sin sin=对边/斜边弧 度(rad)已知弧度计算弧长的公式: 已知弧度÷(180°÷π)×半径已知弧长计算弧度的公式: 已知弧长÷半径×(180°÷π)象限角(R)及方位角(α)象限角:直线与X轴的夹角(R=0~90°)象限角R AB=arctan(ΔX AB2+ΔY AB2)方位角:从标准方向起,顺时针量到直线所成的夹角。
从0°~360°方位角αAB=该角所在的象限加上相应的数值(如下)当增量x正;y正,那就是在第一象限控 制 测 量小地区控制测量1.相关的概念:控制网:就是在测区内选择一些有控制意义的点(称为控制点)构成的几何图形。
按功能分为:平面控制网、高程控制网。
按规模分为: 国家控制网、城市控制网、小区域控制网和图根控制网。
国家控制网分为:一、二、三、四等4个级别。
小地区控制网:是指在面积小于15m2 范围内建立的控制网。
2.平面控制导线测量就是测量导线各边长和各转折角,然后根据已知数据和观测值计算各导线点的平面坐标。
(1)附合导线:起始于一个高级控制点,最后附和到另一个高级控制点的导线,称为附和导线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标方位角和象限角的概念
坐标方位角和象限角是研究平面上点的位置和方向的两个概念。
它们广泛应用于数学、物理学、地理学等各个领域。
首先,我们来看坐标方位角。
坐标方位角是指从正半轴到线段与正半轴之间的夹角,它的范围在0度到360度之间。
我们通常使用极坐标系来表示坐标方位角。
在二维平面上,我们可以用一个原点和一组直角坐标轴来构建极坐标系。
原点就是极点,x轴就是极轴。
我们可以通过一个点到原点的距离以及与x轴的夹角来表示这个点的位置。
这个距离称为极径,夹角就是坐标方位角。
坐标方位角的计算方法有很多种。
一种常用的方法是使用反三角函数来计算夹角。
设一个点的坐标是(x, y),那么这个点到原点的距离r可以通过勾股定理计算得出:r = sqrt(x^2 + y^2)。
然后,我们可以利用反正切函数计算夹角。
如果要求的是该点的坐标方位角θ,则有如下公式:θ= arctan(y/x)。
需要注意的是,当点位于y轴上方时,θ的值需要加上360度才能保证其范围在0度到360度之间。
接下来,我们来看象限角。
象限角也是表示一个点在平面上的位置和方向的概念,它范围在-180度到180度之间。
通过象限角,我们可以知道一个点在第几象限。
在二维直角坐标系中,我们将x轴和y轴分别称为第一象限、第二象限、第三象限和第四象限。
象限角可以使用反正切函数计算得出。
与坐标方位角不同的是,象限角的范围是-180度到180度之间。
要计算一个点的象限角,我们可以首先计算坐标方位角θ。
然后,我们根据θ的值判断该点所处的象限。
如果0度≤θ<90度,那么该点处于第一象限;如果90度≤θ<180度,那么该点处于第二象限;如果-90度≤θ<0度,那么该点处于第四象限;如果-180度≤θ<-90度,那么该点处于第三象限。
通过这种方式,我们可以将一个点的位置和方向用象限角来表示。
坐标方位角和象限角是描述平面上点的两个重要概念。
它们具有一定的相似性,都可以用角度来表示点的位置和方向。
但它们也有一些不同之处。
坐标方位角的范围是0度到360度,而象限角的范围是-180度到180度。
坐标方位角主要用于极坐标系中,而象限角主要用于直角坐标系中。
坐标方位角可以用来计算点与点之间的夹角,而象限角主要用来判断一个点位于哪个象限。
总而言之,坐标方位角和象限角是研究平面上点位置和方向的两个重要概念。
它们通过角度的表示方式,帮助我们更加直观地理解和描述点的位置和方向。
无论是在数学上、物理学上还是地理学上,它们都有着广泛的应用和重要的意义。