履带式起重机折线式臂架结构承载能力_王刚
250吨履带式起重机稳定性验算

250吨履带式起重机稳定性验算
引言
本文档旨在对250吨履带式起重机的稳定性进行验算。
通过对该起重机重心位置和支撑基础的分析,以及对稳定性方程的应用,评估起重机在使用过程中的稳定性情况。
起重机重心位置
起重机的重心位置是稳定性分析的重要参数。
我们首先需要确定起重机各组件的重量和重心位置,然后计算整个起重机的重心位置。
支撑基础分析
起重机的稳定性与其所放置的支撑基础有关。
我们需要考虑基础的承载能力、坚固程度和地基条件等因素。
根据实际情况,进行支撑基础的分析,确保其能够满足起重机的稳定性要求。
稳定性方程应用
稳定性方程用于评估起重机在工作过程中的稳定性。
通过建立稳定性方程,并考虑起重机受力情况、重心位置和支撑基础条件等
因素,计算起重机的稳定性指标。
根据计算结果,评估起重机是否满足稳定性要求。
结论
通过对250吨履带式起重机的稳定性进行验算,我们可以分析起重机的重心位置,并确保支撑基础满足稳定性要求。
通过应用稳定性方程,评估起重机在使用过程中的稳定性情况。
以上分析结果将有助于确保起重机在工作过程中的安全性和稳定性。
以上为对250吨履带式起重机稳定性的验算,希望对您有所帮助。
履带起重机主要结构、臂架组合形式、履带平均接地比压计算、结构试验、检验项目
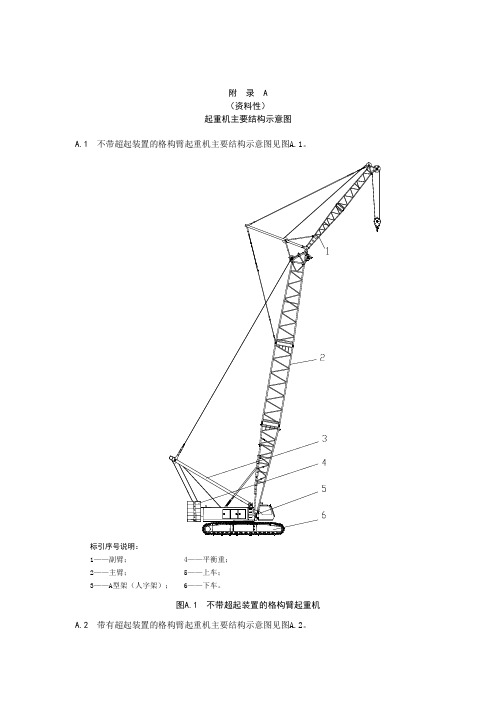
附录 A(资料性)起重机主要结构示意图A.1 不带超起装置的格构臂起重机主要结构示意图见图A.1。
标引序号说明:1——副臂; 4——平衡重;2——主臂; 5——上车;3——A型架(人字架); 6——下车。
图A.1 不带超起装置的格构臂起重机A.2 带有超起装置的格构臂起重机主要结构示意图见图A.2。
标引序号说明:1——臂架; 5——平衡重;2——上车; 6——超起桅杆;3——下车; 7——滑轮装置。
4——超起平衡重;图A.2 带有超起装置的格构臂起重机A.3 实腹(箱形)臂起重机主要结构示意图见图A.3。
(增加)标引序号说明:1——副臂; 4——上车;2——主臂; 5——下车;3——平衡重;图A.3 实腹(箱形)臂起重机附录 B(资料性)起重机臂架组合主要形式起重机臂架组合主要形式示意图见图B.1、图B.2。
A B C D E 说明:A——主臂结构的起重机;B——主臂+变幅副臂结构的起重机;C——主臂+固定副臂结构的起重机;D——带超起平衡重的臂架结构的起重机;E——主臂+变幅副臂和超起平衡重的臂架结构的起重机。
图B.1 格构臂臂架组合示意图A BC说明:A——主臂结构的实腹(箱形)臂起重机;B——主臂+副臂结构的实腹(箱形)臂起重机;C——带超起装置的实腹(箱形)臂起重机。
图B.2 实腹(箱形)臂臂架组合示意图附录 C(资料性)履带平均接地比压计算方法履带平均接地比压计算方法如下:a)履带接地长度为驱动轮和从动轮的中心线间的距离L4(见图2);b)接地面积按公式(C.1)计算。
A=L4×2B1 ……………………………………(C.1)式中:A——履带接地面积,单位为平方毫米(mm2);L4——履带接地长度,单位为毫米(mm);B1——左或右侧履带板宽度(见图2),单位为毫米(mm)。
c)平均接地比压按公式(C.2)计算。
A gW T ⨯=…………………………………(C.2)式中:T——履带平均接地比压,单位为兆帕(MPa);W——起重机的设计自重,单位为千克(kg);g——重力加速度,单位为米每二次方秒(m/s2)。
履带起重机结构介绍

履带起重机履带起重机履带起重机是将起重作业部分装在履带底盘上,行走依靠履带装置的流动式起重机。
可以进行物料起重、运输、装卸和安装等作业。
履带起重机具有起重能力强、接地比压小、转弯半径小、爬坡能力大、不需支腿、带载行驶、作业稳定性好以及桁架组合高度可自由更换等优点,在电力、市政、桥梁、石油化工、水利水电等建设行业应用广泛。
主机结构为降低成本,减少结构件质量,高强度材料已作为主机结构的首选材料,屈服强度达到500 MPa以上。
其结构尺寸明显减小,以LR1750-750 t 产品为例,转台、车架、履带架结构除特殊用板(履带与车架连接处)外,主要承载板厚度均在35 mm以内(而以往结构需要40 mm以上,常用的是50~70 mm的板)。
采用宽肢薄壁结构,极大地提高了结构整体稳定性和承载能力。
主机结构的自重占整机自重的比例也由通常的60%降到40%,转台结构型式主要有两种,一种是以欧美为代表的封闭式转台结构,另一种是以日本为代表的小箱型转台结构。
封闭式结构由两个高度较大的工字型或箱型截面组成,刚性好,在大型产品中得到广泛应用。
小箱型结构在小箱型截面上配置支座连接机构,两侧设置机棚放置发动机、油箱、回转机构等部件。
为维修方便,日本新推出半开放式转台结构,一侧放置部件,另一侧设置走台板,完全开放,维修者很容易接近机构、动力部件,更换易损件或查看运转状况。
转台组合方式有两种,一是转台、回转支承与车架一部分连成为一体,转台其他部分可独立运输,或再拆解运输,如马尼托瓦克的M21000型产品。
另一种是将上下车分开运输,分开部分与回转支承采用快速连接方式,如特雷克斯-德马格公司的CC5800型产品的快速销轴连接方式。
考虑增大行走牵引能力和提高工作速度,行走机构可选用四驱型式。
履带架的结构随之改进,其张紧通过张紧梁套接于履带架结构中实现。
为降低驱动转矩,驱动轮采用链轮型式,以减小直径,特雷克斯-德马格公司的CC2500型产品即采用了这种型式。
中联QUY260履带起重机参数
中联重科QUY260履带起重机技术介绍册中联重科工程起重机公司2008年2月目录1.外形尺寸和重量1)基本臂臂主机外形尺寸及工作重量2)主要性能参数3)主要配置4)主要运输部件外形尺寸及重量主机履带架配重底板配重2.技术说明1)技术创新点2)臂架及拉板3)机构4)系统5)安全装置6)操纵室7)吊钩3.臂架配置组合表4.起重性能参数1)主臂起重特性2)主臂+固定副臂起重特性3)主臂+塔式副臂起重特性1.外形尺寸和重量1)基本臂臂主机外形尺寸及工作重量2)QUY260主要性能参数QUY260主要配置序号 名 称 供应商 备注 1发动机瑞典VOLVO 美国康明斯TWD1240VE QSL9-C305 2双变量主泵+齿轮泵博世力士乐(中国)有限公司进口3 行走马达 日本纳博特斯克有限公司 进口4 行走减速机5 变幅卷扬减速机 博世力士乐(北京)液压有限公司力士乐减速机+德国林德马达6 变幅卷扬马达7 起升卷扬马达8 起升卷扬减速机9 回转减速机 10 回转马达 11 变幅卷扬平衡阀 博世力士乐(北京)液压有限公司德国布赫液压 12 起升卷扬平衡阀 13 回转支承 德国DRR/COM 公司 进口 14 电比例减压阀组 博世力士乐(中国)有限公司德国布赫液压 进口15 六联主阀组 16 集中自动润滑系统 德国BAKE 有限公司 进口 17 钢丝绳法尔福钢绳(上海)有限公司德国进口注意:技术参数和配置会因技术改进而发生改变2.技术说明中联开发的QUY260吨履带吊是综合国际上现有先进机型的优势,并根据国内市场需求而开发的,超过国内同类产品的水平,达到国际先进水平。
该产品在臂架、防后倾、控制系统等方面都有所创新,极大地提高了设备的起重性能、操纵性能,且安全可靠,具有较高的性价比。
1)技术创新点卓越的起重性能主臂长度为20~95米,5米幅度最大起重量为260t,起重力矩达到1362t•m;主臂与固定副臂组合最大长度107米,最大起升高度108米,最大起重量34t,主臂与塔式副臂组合最大长度122米,最大起升高度120米,塔式副臂可在15°~75°范围内变幅,作业幅度达到86米,最大起重量73.5t。
中联重科QUY650履带起重机技术介绍册资料

中联牌QUY650履带起重机技术介绍册长沙中联重科工程起重机分公司2010年1月目录产品主要特点及优势外形尺寸和主要参数1)超起主臂主机外形尺寸2)超起塔式副臂工况外形尺寸3)主要性能参数4)主要配置5)主要运输部件外形尺寸及重量技术说明1)工况及臂架系统2)机构3)系统4)安全装置5)操纵室6)吊钩起重特性吊装案例产品主要特点及优势●高端配置,确保设备安全可靠1、采用VOLVO原装进口大功率电喷发动机,动力强劲,油量可以根据转速自动调节,更节能,更环保;2、回转支撑为高精度进口件,强度高,韧性好,使得回转平稳,可靠性高,使用寿命更长;3、臂架采用进口高强度管材,拉板采用瑞典进口960高强板,主要结构件材料均采用高强度钢材,保证整车强劲的起重性能和安全可靠性。
●优良的作业特性1、作业范围广,作业设备配有超起桅杆及超起配重,超起配重作业幅度分为13m和15m,极大地增加了起重机的起重能力;2、采用法尔福钢绳,LEBUS 卷筒多层缠绕不乱绳,减速机内藏,噪音低、高效率、长寿命、换油方便;3、100%额定载荷带载直线行走;4、各种防后倾装置有效防止臂架后倾翻。
●客户使用成本低1、标准配置的电动燃油加油泵,省时、方便;2、配有柴油动力的移动泵站,使整机装配机械化,降低安装工人的劳动强度;3、主变幅桅杆、主变幅滑轮组与主变幅卷扬可同时拆下(由移动泵站插拔销轴);4、主、副臂套装,节省运输车辆,降低运输费用。
外形尺寸和主要参数1、超起主臂主机外形尺寸2、超起塔式副臂工况外形尺寸3、主要性能参数4、主要运输部件外形尺寸、重量及数量主臂12m臂A ×1 长度12250 mm宽度2980 mm高度3130 mm重量10.5t主臂12m臂A.S ×1 长度12250 mm宽度2980 mm高度3130 mm重量10.5t主臂12m臂B ×3 长度12250 mm宽度2980 mm高度3130 mm重量9.5t主臂12m臂C ×1 长度12250 mm宽度2980 mm高度3130 mm重量9.15t主臂12m臂C.S ×1 长度12250 mm宽度2980 mm高度3130 mm重量9.15t650吨塔头×1 长度2615 mm宽度3620 mm高度1055 mm重量 3.9t300吨塔头×1长度2615 mm宽度3620 mm高度1170 mm重量 2.8t150吨塔头+塔臂底节×1长度18800 mm宽度2625 mm高度3630 mm重量7.7t塔臂前撑杆×1长度17060 mm宽度2505 mm高度1070 mm重量 4.3t塔臂后撑杆×1长度16560 mm宽度2500 mm高度845 mm重量6t塔臂顶节臂×1长度7090 mm宽度2545 mm高度2755 mm重量3t塔臂6m臂×1长度6200 mm宽度2560 mm高度2550 mm重量 3.1t塔臂12m臂×5 长度12200 mm宽度2560 mm高度2550 mm重量 6.5t超起桅杆底节臂×1 长度13250 mm宽度2720 mm高度2830 mm重量11.5t超起桅杆顶节臂×1 长度7650 mm宽度3000 mm高度2870 mm重量4t超起桅杆中间臂×1 长度12200 mm宽度2560 mm高度2550 mm重量 3.6t鹅头架×1长度2560 mm宽度1330 mm高度680 mm重量0.2t600吨吊钩×1 长度2490 mm宽度3040 mm高度930 mm重量11.5t100吨吊钩×1 长度1965 mm宽度970 mm高度800 mm重量 4.1t50吨吊钩×1 长度1965 mm宽度700 mm高度800 mm重量 2.65t16吨吊钩×1 长度1155 mm宽度530 mm高度530 mm重量0.9t配重框架×2长度2028 mm宽度2660 mm高度1965 mm重量 6.5t车身压重框架×2 长度1990 mm宽度2560 mm高度730 mm重量 1.1t超起配重底架×1 长度8100 mm宽度2800 mm高度920 mm重量9t10吨配重块×46 长度1700 mm宽度2400 mm高度400 mm重量10t5吨配重块×7 长度1700 mm宽度2400 mm高度310 mm重量5t技术说明1、工况及臂架系统工况分为标准工况和超起工况两种工作模式,臂架为桁架式结构,进口高强度管材,拉板采用进口高强度板材。
ZCC800H技术介绍册-新

6 / 43
二、技术说明
2.6 回转系统
由轴向定量柱塞液压马达通过行星齿轮减速机驱动, 其输出轴上的小齿轮绕固定在车架 上的回转支承齿圈转动,带动转台作 360°全回转运动。 制动:通过回转马达端的弹簧制动。 回转支承:单排滚珠四点接触式回转支承,内啮合 自由滑转功能:减小吊臂侧向拉力 回转速度: 0~2 rpm
2.9 下车结构
高强钢焊接车身。 履带动力: 独立的液压驱动系统嵌入履带架内。每侧液压驱动系统包含了一个液压马达,液压马达 通过行星减速机带动驱动轮。 液压马达和减速机完全嵌入履带架内,不超出履带板的宽度。 转向机构: 通过操纵杆及脚踏板控制履带的直线行走、单边转向、差速转向、原地转向、带载行驶 等动作,具有高度的机动性和灵活性。 履带制动:通过行走马达端的弹簧制动。 履带伸缩机构: 履带架的伸缩由液压油缸控制。
7 / 43
二、技术说明
履带架轨距(伸/缩) ………4200/2600mm 支重轮:免维护密封式结构 履带板:单边 63 件,履带板宽 800mm 行走速度:0~1.57 km/h 爬坡能力:30%
2.10 安全装置
本起重机采用多种方式的安全和报警装置,包括机械,电子和液压的,保障机器的安全 使用。 力矩限制器: 全自动力矩限制器,安装在操纵室内。当起重力矩达到额定力矩的 90%时,警报灯 亮蜂鸣器发出警告声,在接近额定力矩时能自动停止起重机的运动。数字式液晶显示板 上可根据需要显示如下数据:力矩比、主臂仰角、主臂长度、工作幅度、实际吊钩载荷、 允许起重载荷。 主臂角度指示器: 角度指示器设置在底节臂的后下方(即操纵室右侧面) ,驾驶员可在操纵室内清晰地看 出吊臂的仰角。 起升高度限位器 装在工作臂顶端上的限位开关及重锤等组件,用于防止吊钩过度提升。当吊钩提升到一 定高度时,限位开关动作发出信号,电气系统自动切断吊钩提升动作,并在操纵室内通 过蜂鸣器与指示灯发出声光报警,从而防止吊钩出现过度提升现象。 主臂极限位置报警保护系统 由装在转台上底节臂附件的限位开关控制,用于主臂极限角度报警及保护。当臂架变幅 至主臂 80°时,触发底节臂限位开关,切断向上变幅动作,并在操纵室内通过蜂鸣器与 指示灯发出声光报警。 钢丝绳过放保护装置 当卷筒内钢丝绳放至最后三圈时, 保护装置发出信号, 电气系统自动切断放绳落钩动作, 并在操纵室内通过蜂鸣器与指示灯发出声光报警。 起重臂防后倾装置 配备有主臂防后倾装置及固定副臂防后倾装置。 吊钩防脱钩装置 防止提升重物时重物脱钩。 风速仪 电子风速传感器,可在显示屏上显示实时风速等级,便于警示危险工作环境。 8 / 43
起重机技术参数与载荷
运行速度:起升速度、下降速 度、运行速度等
操作性:操作方便性、安全性、 舒适性等
起重机安全标准
起重机设计、制 造、安装、使用 和维护必须符合 国家相关安全标
准。
起重机必须具备 安全防护装置, 如防脱钩装置、
防滑装置等。
起重机操作人员 必须经过专业培 训,取得相应资
格证书。
起重机使用单位 必须建立完善的 安全管理制度, 定期对起重机进 行检查和维护。
升载荷等
冲击载荷:起重机在起升、运 行、制动等过程中受到的冲击 载荷,如起升、运行、制动等
动载荷:起重机在运动状态 下承受的载荷,如起升、运
行、制动等
风载荷:起重机在室外作业 时受到的风力作用产生的载
荷,如风速、Βιβλιοθήκη 向等载荷的计算方法01
确定起重机的额定载荷:根据 起重机的设计、制造和使用要 求,确定起重机的额定载荷。
载荷的定义
01
载荷是指起重 机在作业过程 中所承受的最 大重量。
02
载荷包括起重 机的自重、吊 具重量、被吊 物重量等。
03
载荷的大小直 接影响起重机 的性能、安全 性和稳定性。
04
载荷的选择需 要根据起重机 的类型、工作 级别、工作环 境等因素进行 综合考虑。
载荷的分类
静载荷:起重机在静止状态 下承受的载荷,如自重、起
02
履带式起重机:安装在履带 底盘上的起重机,具有越野 能力强、稳定性好等特点。
04
塔式起重机:安装在塔架上 的起重机,具有起升高度大、 作业范围广等特点。
06
桥式起重机:安装在桥架上 的起重机,具有起重量大、 作业范围广等特点。
起重机性能
起重能力:最大起重量、最大 起升高度、最大工作半径等
ZCC1000H技术介绍册 新
标准主臂 S-1
主臂工况(带副臂) S-2
鹅头架工况 S-3
固定副臂工况 固定副臂工况(带主钩) SF-1 SF-2
9 / 34
三、规格参数
3.1 主要性能参数
项 目 单位 数值 备注
最大起重量/幅度 固定副臂最大起重量 主臂长度 固定副臂长度 最长主臂+最长固定副臂 主臂变幅角度 固定副臂安装角 主副卷扬速度 自由落钩卷扬 普通卷扬
最大起重量: 8 吨×21.3 米 主臂长度: 31 米~55 米 固定副臂长度: 6 米~18 米 固定副臂长度: 6 米~18 米 主臂长度: 31 米~55 米
固定副臂工况(带主钩)
最大起重量: 8 吨×18.3 米
2 / 35
二、技术说明
2.1 动力装置
发动机型号:Cummins QSL9-280,U.S. EPA Tier 3 发动机工作环境温度:-20°C~40°C 额定功率/转速:209kW@2100RPM 最大扭矩/转速:1424N•m@1500rpm 类型:直列 6 缸,带涡轮增压器 排量:8.9L 冷却方式:水冷、空空中冷 油门:电子油门控制 空气滤清器:两级过滤 燃油箱:容积 400L
2.7 上车结构
框型结构高强钢焊接, 具有较强的强度和钢度; 部件安装位置均机加工, 满足定位要求。 所有部件安装位置清晰明确,维护方便。 上车配重: 由配重托盘和 6 块配重块组成,总重 28t,可 操纵室和操作
全封闭式操作舱,视野开阔,配有安全玻璃,座椅高度可调,带有扶手与头枕,安装间 隙式雨刮器和车窗清洁喷头,全覆盖软内饰。 操作手柄:操作手柄分别控制主、副卷扬,回转和主臂变幅动作。 脚踏板:行走脚踏板分别控制整机前后行走及转弯等;油门踏板控制发动机转速;自由 落钩踏板控制自由落钩制动(随卷扬选配) 。
履带式起重机
回转减速器的加油位置图
起重装置部分的维护
各转动部件要经常加注润滑脂(吊钩滑 轮组、臂端滑轮组、导向滑轮、卷扬机 滚筒等等)。 及时处理各部位的漏油。 检查起升和变幅减速器的油量并补充。 检查各部位的连接螺栓的松紧情况并紧 固松动的螺栓。 保证钢丝绳充分润滑。 做好各部件的清洁卫生。
液压系统的维护
安全装置的维护
对于制动器要及时清洁制动摩擦片上的 油污,及时更换磨损的制动片,保证制 动灵活有效。 对于安全操纵机构的销轴要经常加注润 滑脂,保证各转动部位转动灵活。 对于起升限位装置的重锤要经常检查其 连接螺栓的紧固情况,连接钢丝绳的紧 固情况。
电气系统
用于控制起重机的各 电器元件的正常工作。 可分为:主电路、控 制电路、监测器电路、 制动控制电路、力矩 限制器控制电路、自 动停止电路等等。
安全装置
用于保证履带起重机安全工作。 主要有:起升限位装置、力矩限制器、 吊臂角度指示仪、吊臂防后倾保护装置、 卷扬机棘爪和制动器、回转制动器等等。
国内常见:徐州重型机械厂,抚顺挖掘机 制造厂,中联重科浦沅分公司,上海三一 科技有限公司,山东鲁能光大重型机械设 备有限公司,北方交通公司,哈尔滨四海 工程机械制造公司
LR11350 (1350t)
CC8800-1 TWIN (3200t)
M21000 (907t)
M31000 (2300t)
下车行走部分
起重机的底盘,使其 能灵活行走 组成:履带、驱动轮、 引导轮、支重轮、拖 带轮、履带张紧装置、 驱动马达、行走减速 箱、履带伸缩油缸等。
回转支承部分
安装在下车底盘上, 用来支承上车回转部 分 包括回转滚动轴承及 固定回转支承的机架
动力装置
为起重机提供驱动力 主要是四冲程柴油机 发动机驱动液压油泵, 将机械能转化为液压 能。 液压马达和液压油缸 为执行机构。
履带式起重机接地比压的近似计算
原选厂一期建设的磨矿选别工艺,处理矿石 2400t/d 的规 模是按两个处理矿石 1200t/d 系列的方案设计。因为 1# 系列选 用了选厂闲置的两台 3200×3100 球磨机,实际生产能力可达 1400t/d,比选用 2700×3600 球磨机的 2# 系列高出 200t/d,所以 一期建成时实际磨机处理能力可达到 2600t/d。为了同磨矿能力 相匹配,1# 系列选铜回路的浮选机总槽数比 2# 系列多设置了 4 台(粗扫选 2 台,精选 2 台)。2006 年为了提高铜精矿品位,1# 系 列又增加了一次精选作业,即将原来两次精选改为三次精选。 为了进一步提高铁精矿品位,又在选铁回路新增了立式脉冲振 动磁场磁选机和高频振动细筛。
pmax 是该工况下平均接地比压 0.104MPa 的 2.73 倍。
4 制表
为方便计算,可以将以上计算方法用 EXECL 表格的方 式,把各参数输入 EXECL 表格中,利用 EXECL 的函数功能进 行方便快速的计算(如表 1)。
表 1 QUY80 履带式起重机最大接地比压计算表
参数名称
符号 单位 数值 计算结果
58m 主臂工况:G1=760kN,Gb=93.1kN,R=13m,起重量(包含吊
钩、滑轮组、钢丝绳重量)Q1=98kN,求最大接地比压 pmax:
cosα=
R-A l
=cosα=
R-A l
=
13-1.2 58
=0.203
α=78.3°
假 定 吊 臂 重 心 在 吊 臂 中 点 ,Gb1 =
lb1 l
履带式起重机自重大,稳定性能好,在施工现场中经常使 用履带式起重机吊装大型机具和构件,履带式起重机与地面接 触产生接地比压,在履带式起重机制造厂提供的使用说明书 中,往往只给出了一个履带式起重机带基本臂空载工况下的平 均接地比压,此值在实际作业中对判断起重机对地面的作用力 并没有实际意义。在编制施工方案时,因为缺乏相应资料,往往 用起重机的重量和吊物的重量之总和除以履带的接地面积之 和所得的平均值作为对地面的承载能力的要求。这种方法显然 是错误的,因为履带式起重机在不同工况,随着上车部分的回 转和吊臂的起俯,其履带的不同位置对地面的接地压力也是变 化的,该接地比压中的最大值即最大接地比压决定了支承面承 载履带式起重机的能力,为保证起重机在作业过程中安全可 靠,有必要对其最大接地比压进行分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
履带式起重机的臂架结构是主要的承载部件, 起重机的变幅机构,包括桅杆、撑杆和拉板,以外 力的形式作用到臂架上,对整体进行极限承载分析 需要给出臂架结构的节点力平衡方程。由于吊重是 臂架结构承受的主要变化外力,所以这里把吊重考 虑成主要变化参量,通过跟踪臂架在不同吊重下的 平衡路径求得结构的失稳载荷。臂架结构的平衡方 程可以写成下面的形式
月 2015 年 2 月
王
刚等:履带式起重机折线式臂架结构承载能力
113
线性分析的子结构方法, 可以有效地处理以上问题。 其核心思想可以表述如下。 (1) 考虑到细长框架结构的几何非线性效应主 要体现在大位移和大转动上,将其按长度方向划分 为多个子结构,只要划分合理,就能使得在子结构 坐标系下,每个节点位移均是小位移。这样每个子 结构就能减缩成只含有边界自由度的子结构单元, 大大缩减了自由度。 (2) 根据臂架结构自身的特点:每个臂节的端 面均为矩形,在实际使用时各个臂节相互对接。因 此,每个臂节的端面都进行了加强处理,可以认为 臂架在承载过程中,每个臂节的端面仍保持为矩形 截面。按照以上的方法,可以把整个臂架划分为多 个子结构,而每个子结构只需要两个端面形心的位 移和端面转角就可以表示其所有节点自由度。 这样一来,每个臂节都简化成了形式上只有两 个节点的广义梁单元,但是简化后的子结构单元保 留了臂节的真实信息。子结构单元在保证精度的前 提下,可以显著地提高结构分析的效率。 如图 1 所示,总体坐标系的基矢量为 g1 , g2 和 g3 , 子结构左右端面形心相对于总体坐标系的当前 矢径分别为 r1 和 r2 ,总体转动参数分别为 θ1 和 θ2 。
(2)
R 式中, KT 为平衡方程的切线刚度阵;k 是 u
稳定化系数,可根据具体情况选取。 (2) 在区间 0 积分常微分方程式(2), 积分过程中时刻检查终止条件(3)。 (3) 对切线刚度阵作矩阵分解,即
K T LULT
(3)
式中, L 是下三角阵; U 是对角阵。 如果系统遇到分叉点失稳,对应 K T 的行列式 变号,即 U 的行列式变号;如果系统遇到极值点失 稳,则求解微分方程的方法无法越过极值点,数值 表现为位移对载荷系数的导数趋于无穷大,在程序 实现时可设置 du max k0 d
履带式起重机的臂架结构是由圆环截面钢管 组成的细长框架结构。因此,简单地将整个臂架结 构简化为一根梁,无法真实地体现臂架结构的力学 性质,而且精确地给出简化梁单元的刚度阵并不是 很容易的。同时,由于整个臂架结构的细长特点, 结构的几何非线性效应不可忽略。 文献 [16-17] 提出了一种细长框架结构几何非
速高效的方法求解失稳载荷。 基于这一考虑,本文将臂架结构平衡方程求导 得到微分方程,通过求解微分方程和相应的失稳判 断准则,结合现有的微分方程求解器,能够快速地 求得失稳载荷。其主要操作如下。 (1) 将平衡方程式(1)对载荷系数 λ 求导,得到 含载荷系数的微分方程,即
R du u d Q0 k R Q0 0
(4)
1
节点力平衡方程的微分形式
式 (4) 表示臂架结构位移对载荷系数的导数最 大绝对值达到上限, 即结构出现极值点失稳。 其中, k0 为一个很大的数,可根据具体情况选取。 按照上述方法可快速求得履带式起重机臂架 结构的失稳载荷。然而,精确地给出具体结构问题 的非线性节点力平衡方程及其切线刚度阵并不是很 容易的。以下章节会针对履带式起重机的折线式臂 架结构和附加约束机构,给出臂架结构的节点力平 衡方程及其切线刚度阵,从而得到含载荷参量的节 点力平衡方程的微分形式。
R u, Q0 0
(1)
2
臂架结构自由度减缩及广义节点力
式中, u 是臂架结构的节点位移和机构位移组成的 Q0 是吊重增量, 列阵; 可以根据具体问题进行选择;
是吊重系数。
式(1)描述了一般结构的稳定性问题平衡方程。 履带式起重机臂架结构的失稳载荷求解并不要求很 高的精度(需要考虑安全系数);同时,各种起重机 规范中的起重性能曲线包含很多工况,需要一种快
0
前言
*
履带式起重机作为一种常用的起重机械,可以 实现大范围的高空吊重任务。履带式起重机的臂架 结构分析方面已经积累了大量的相关研究,这些研 究在一定程度上解决了一些理论和工程实际问 [1-3] 题 。由于吊重的高度可以达到几十米甚至上百
* 国家自然科学基金资助项目(11372057)。 20140216 收到初稿, 20140902 收到修改稿
Abstract:The hinged boom structures of crawler cranes are typical slender frame structures, whose stability is an important basis for lifting performance. The boom structures are divided into several substructures by taking each section as an element, and an embedded coordinate system is defined. Internal displacements of each substructure are reduced to the displacements of its boundary ends through the condensation of degrees of freedom. Based on the co-rotational method, the generalized nodal internal forces for substructure elements are formulated. Considering the mechanism constraints for the boom structures and the load lifting ways, the additional nodal external forces and their derivatives on the structure and mechanism displacements are obtained. The equations by differentiating the equilibrium equations of generalized nodal forces for the boom structures of crawler cranes with respect to the load factor are obtained. The critical load can be obtained through solving the differential equations and considering the instability criterion. A numerical example of hinged boom structures for a kind of crawler crane is given, which proves the presented method to be quick and high accuracy. Key words: crawler crane; hinged boom structure; critical load; geometric nonlinearity; co-rotational method; mechanism constraint
其中
Du 1 1 T T ρe2 T e2 e3 e1 r2 r1 e r2 r1
摘要:履带式起重机的折线式臂架是典型的细长框架结构,臂架结构的稳定性是系统起重性能一个重要依据。以每个臂节为 单位对臂架结构划分多个子结构,建立随子结构一起运动的随动坐标系。通过自由度凝聚,将子结构的内部位移凝聚到边界 端面上。基于共旋坐标法,推导子结构单元的广义节点内力。考虑到臂架结构受到的机构约束和重物提升方式,给出由于机 构位移和吊重附加在臂架结构上的广义节点外力及其对结构位移和机构位移的导数。 对含载荷参数的臂架结构节点力平衡方 程求导,得到一组微分方程,通过求解微分方程并结合失稳判断准则可以得到臂架结构的失稳载荷。通过数值算例,说明该 方法在快速求解履带式起重机折线式臂架结构的失稳载荷方面具有很好的速度和精度。 关键词:履带式起重机;折线式臂架结构;失稳载荷;几何非线性;共旋坐标法;机构约束 中图分类号:O342;TH213
米,履带式起重机使用的臂架结构通常都是细长的 框架结构。因此,起重机的起重性能不仅需要考虑 结构的强度,同时还需要考虑整个系统的稳定性。 传统的起重机臂架结构稳定性分析,主要采用 压杆屈曲分析方法,将臂架等效为细长杆件,拉板 力和吊重向臂架结构的轴向进行等效,采用经验公 式计算臂架结构的屈曲载荷。这种方法对于主臂工 况的起重机得到了广泛的应用,但是对于副臂工况 的起重机折线式臂架的稳定性分析就显得无能为力 了。同时,这类传统方法没有完全考虑臂架结构的
112
机
械
工程Leabharlann 学报第 51 卷第 3 期期
具体形式,得到的等效细长杆件并不精确。 由于臂架结构的细长特点,其稳定性分析必须 考虑结构的几何非线性效应。目前比较成熟的几类 几何非线性有限元方法包括参考初始构型的完全拉 格朗日方法、参考当前构型的更新拉格朗日方法和 [4-6] 共旋坐标法 。 共旋坐标法的主要思想是在每个单元的当前 构型上建立一个描述节点位移的随动坐标系,将单 元的刚体位移分离到随动坐标系相对于初始位置的 位移和转动。对于细长框架结构,其几何非线性效 应主要体现在大位移和大转动上,采用共旋坐标法 可以应用现有的线性单元,省去了复杂非线性单元 [7-9] 的构造 。 结构的稳定性分析是一个古老而又重要的结 构力学问题。多年以来,许多学者提出了各种各样 的求解失稳载荷的方法,包括增量法、弧长法以及 [10-11] 各种改进的弧长法 。以上方法在精确求解临界 载荷、跟踪平衡路径或后屈曲方面各有优缺点,在 [12-15] 具体的工程实际中也得到了广泛的应用 。在处 理具体问题时,操作者需要根据具体的问题特点和 主要任务,选取或改造最为合适的方法。 由于履带式起重机工作时需要通过变幅机构 控制吊重的位置,这样臂架结构就不可避免地要发 生机构位移。考虑了臂架结构的几何非线性效应, 根据具体的履带式起重机附加约束机构,给出了一 种折线式臂架结构失稳载荷的快速计算方法。