2010-01-0370Impacts of AMT gear-shifting on fule optimal look ahead control
资阳GK1C内燃机车液力传动控制系统改造
第31卷第2期2011年4月江西冶金JIANGX I M ETALLURGY V o.l 31,N o .2A pril 2011文章编号:1006 2777(2011)02 0036 03资阳GK1C 内燃机车液力传动控制系统改造章伟成 李小华 程 俊(新余钢铁集团有限公司,江西新余 338001)摘要: 分析资阳GK 1C 内燃机车液力传动箱控制系统的工作流程,应用故障情况,对液力传动箱自动换档控制系统进行优化改造,从而有效降低系统的故障率。
收稿日期:2010-11-12作者简介:章伟成(1972-),男,江西新余人,高级工程师,从事设备管理工作。
关键词: 内燃机车;液力传动;控制系统中图分类号: U262.32文献标志码: CUpgrading of H ydrodyna m ic Drive Control Syste m of Z iyang GK 1C D iesel Loco m otiveZ HANG W eicheng ,LI X i a ohua ,CHENG Jun(X i nyu Iron and Steel G roup Co .,L td .,X i nyu 338001Jiangx,i Ch i na)Abst ract : T he w ork flow o f hydrodyna m ic dr i ve control sy stem of Z i yang GK 1C diese l loco m otive i s ana lysed .T he automa ted shift contro l syste m o f hydrodyna m i c dr i ve is opti m ized to e ffectively reduce the fau lty rate .K ey W ords : d i esel l ocomo ti ve ;hydrodyna m i c drive ;contro l system1 前言资阳GK1C 型内燃机车通过液力传动箱把柴油机动力传递到机车轮对上,并通过液力传动箱内的起动、运转变扭器工作切换即换档,来适应机车不同运行工况要求,使液力传动箱保持较高的传动效率。
纯电动汽车AMT换挡时间和冲击优化控制策略
纯电动汽车AMT换挡时间和冲击优化控制策略郭学茂;吴斌;李天琨;陈存玺;任景【摘要】为了提高自动机械变速器(AMT)电动汽车舒适性,研究了AMT在换挡过程中的冲击问题,其本质原因是换挡电机控制不当导致同步器转速不到位.利用Adams和dSPACE等采集数据并分析问题产生机理,通过Meca标定软件标定控制参数,确定了最优PWM指令,减小了换挡末期的冲击,缩短了换挡时间和动力中断时间,提高了汽车乘坐舒适性和安全性.通过分段PWM控制标定和协同统一的换挡模式,冲击和换挡时间均可降低20~30%.在同步器结构不变的条件下,这种方法可以有效优化换挡时间和冲击.【期刊名称】《车辆与动力技术》【年(卷),期】2019(000)002【总页数】5页(P17-20,25)【关键词】同步器;AMT;电动汽车【作者】郭学茂;吴斌;李天琨;陈存玺;任景【作者单位】北京工业大学环境与能源工程学院,北京100124;北京工业大学环境与能源工程学院,北京100124;北京工业大学环境与能源工程学院,北京100124;北京工业大学环境与能源工程学院,北京100124;北京工业大学环境与能源工程学院,北京100124【正文语种】中文【中图分类】U463.212当前世界能源形势紧张,环境问题日益突出,电动汽车取代内燃机汽车成为发展趋势[1].美国、欧洲、日本等国家和地区都十分重视汽车的电动化,因此,无论是政策上还是技术上电动汽车都更具优势[2].为了使电机的力矩特性更加适合汽车需求,需要配备变速器[3].而追求汽车的舒适性、操纵便捷性,自动变速器是发展的必然趋势.AMT相较于其他自动变速器(CVT、DCT、AT)具有效率高、体积小、重量轻和成本低等特点,在国内使用较多[1,4-5].文献[1]采用PD算法控制多挡换挡电机.文献[3]提出了整车控制器控制驱动电机参与换挡过程的综合协调匹配控制方法.文献[5]对AMT换挡可靠性进行了研究.文献[6]利用CAN总线技术实现了驱动电机控制器和AMT控制器的协调控制.总的来说,目前AMT的研究多集中于整体策略的研究,没有对换挡过程的具体优化;多利用较为复杂的PD控制,而非PWM控制技术;并且集中在货车和大客车等舒适性要求较低的车辆,而对于舒适性要求高的小客车而言,降低换挡时间和冲击显得尤为重要.文中通过对纯电动汽车AMT换挡过程进行研究,提出换挡电机与动力电机相互配合的协同换挡策略和PWM分段控制策略,降低了换挡时间和冲击.首先分析了换挡各阶段同步器的运动状态,然后从理论上和计算机仿真结果对冲击进行分析验证,最后进行台架标定与试验,发现这种策略可有效降低冲击并减少换挡时间.1 换挡机构与过程1.1 换挡机构选用有刷直流电机作为换挡电机.相对于步进电机的控制系统复杂,且存在失步现象,直流电机启动和调速性能好、体积小、能耗低、精度高,适合换挡电机小功率快反应的要求.与无刷直流电机比较,有刷直流电机控制简单、可靠性高、成本低. 丝杠和拨叉是换挡执行机构.随着换挡电机的转动,滚珠丝杠中的滑块会做直线运动.滑块的运动受到摇臂的阻碍从而产生轴向力,使换挡摇臂绕轴心转动,由于摇臂的另一端在换挡拨叉轴的凹槽内,而拨叉轴只能在固定槽内做直线运动,因此换挡电机的旋转运动最终转变为拨叉轴的直线运动,拨叉轴进一步带动啮齿套作直线运动,从而实现变速器的换挡.换挡执行机构如图1所示[7].通过控制电机控制拨叉运动速度与位置间接控制同步器.图1 换挡执行机构1.2 换挡过程冲击主要产生于挂挡阶段,下面我们对挂挡过程中同步器(惯性锁环式)行为分阶段进行分析.(1)预同步阶段在预同步阶段,挂入高挡与挂入低挡稍有不同,但在原理上基本一致,下面以挂入高挡为例介绍预同步阶段工作过程.当接合套在空挡位置时,滑块与同步环存在一定的间隙.同步环由花键毂带着一起转动,当开始换挡时,接合套开始轴向移动,消除了滑块与同步环之间的间隙之后,会推动同步环开始轴向移动,同步环内锥面与接合齿圈锥面开始接触.(2)同步锁止阶段在轴向力的作用下,接合套将同步环紧紧地压在接合齿圈上,二者摩擦锥面间产生的摩擦力矩也越来越大.直到同步环与接合齿圈的转速差为零.由于锁止面上锁止角存在,锁止面上会产生切向的分力,这个分力会产生一个拨环力矩.(3)拨环阶段当同步锁止阶段结束后,同步环与接合齿圈的转速差为零,二者摩擦锥面间没有了相对滑动,所产生的摩擦力矩就会逐渐降低并小于拨环力矩.拨环力矩就会使同步环相对于接合套转过一定角度.接合套就会继续向接合齿圈轴向移动.(4)啮合阶段在拨环阶段结束后,接合套会在轴向力的作用下继续轴向运动并通过同步环.在通过同步环之后,接合套就会与接合齿圈进行啮合.2 换挡冲击分析2.1 理论分析由第一部分换挡过程分析知挂挡时的冲击主要产生于同步锁止和拨环阶段.冲量是力的时间累积效应的量度,用冲量来表示冲击会比单纯用作用力来衡量更加合适,冲量计算公式如下:Ft=mv2-mv1=m(v2-v1)=mΔv.(1)同步器质量不变,因此,挂挡时速度降Δv越小冲击越小.2.2 Adams仿真验证分析惯性锁环式同步器的结构并用Solidworks建立三维模型,然后导入Adams 软件.在Adams环境中设置常用单位、同步器的各个构件的属性与换挡力函数,进行计算机仿真.Adams的同步器仿真模型如图2所示.图2 Adams的同步器仿真模型2.3 仿真结果仿真结果如图3所示.图3 Adams仿真结果上图是一个降挡的仿真结果,描述了部件随时间的状态变化.点划线表示接合套位移,实线表示接合齿圈角速度,虚线表示花键毂角速度.左侧主坐标轴是角速度,右侧副坐标轴是位移.接合齿圈速度会有一个突变(图中实线突变处)这就是换挡冲击.这个冲击可大可小,跟挂挡时齿轮接合时机有关.可以通过降低接合时刻的接合套速度减小冲击.3 双电机协调控制与分段PWM结合3.1 双电机协调控制由于没有离合器,因此动力中断依赖于驱动电机模式转换.驱动电机的3种工作模式:自由模式;调速模式;力矩模式.换挡电机和驱动电机一体化控制时,换挡电机控制器(TCU)与驱动电机控制器(MCU)在整车控制器(VCU)的协调控制下完成换挡[6].正常行驶工况下,动力驱动系统工作在力矩模式下,此时,电机的输出转矩与加速踏板成正比;在换挡期间,驱动电机首先降矩转换为自由模式,接着换挡电机可以轻易地摘挡,然后驱动电机进入调速模式,达到合适的转速差时挂挡,紧接着驱动电机升矩进入力矩模式汽车正常行驶.换挡过程与电机模式关系如表1所示. 表1 换挡过程与电机模式关系换挡过程电机工作模式控制策略换挡前力矩模式根据踏板信号输出目标力矩摘空挡自由模式目标力矩为0,电机自由旋转等待同步调速模式给定目标转速换挡操作自由模式目标力矩为0,电机自由旋转换挡完成力矩模式根据踏板信号输出目标力矩电机的转速与转矩由传动控制系统经由CAN总线发出,驱动电机的工作模式由传动控制系统控制.控制流程图如图4所示.图4 两挡AMT换挡策略3.2 分段PWMPWM技术是以固定的频率开关恒压源,相比较于PID, PWM具有响应快、效率高、调速范围宽、使用元件少、线路简单等特点,适合于换挡这种持续时间短,速度精度要求相对较低的情况,因此采用改变PWM的方式来调节电机的速度.分三段PWM有利于控制电机速度的变化.换挡电机和驱动电机一体化控制策略与分段PWM的换挡电机控制方式结合理论上是可以降低冲击的.紧接着建立Simulink/Stateflow控制模型对PWM进行标定并试验验证.4 台架试验与标定4.1 台架结构台架主要由变速箱、控制电机、驱动电机、控制单元以及电池组和飞轮构成,如图5所示.图5 AMT台架示意图4.2 建立Simulink/Stateflow控制模型传感器,控制器(TCU, MCU)连同dSPACE和计算机共同构成一个开环系统.根据换挡逻辑和控制策略建立Simulink/Stateflow控制模型并编译刷写到CPU中,利用Meca进行数据标定.4.3 PWM分段标定依据前面的冲击分析,要尽量降低齿轮接合时的速度以减小冲击,同时要减小换挡时间.于是想出不同时刻用不同的PWM值,而不是从始至终用一个值.优化前挂挡PWM恒为0.8,优化后PWM分为3段,分别为1、0.5、1.4.4 试验结果依据上面的试验条件得到优化前后换挡过程如图6所示.图6 优化前后换挡过程峰值速度出现的位置是接合套接触接合齿圈时的速度,此时,速度越大,冲击越大,对同步器的损伤越大.从图中取冲击前后两个速度极值点进行冲量分析,设同步器质量为m0.(1)优化前(0.631,253.5),(0.645,39.0)Ft1=mΔv=m0(253.5-39.0)=214.5m0.(2)优化后(0.618,172.8),(0.624,12.8)Ft2=mΔv=m0(172.8-12.8)=160.0m0.(3)降辐(4)(2)优化前换挡时间Δt1=0.700-0.316=0.384(s).(5)优化后Δt2=0.668-0.381=0.287(s).(6)降幅(7)通过台架试验证明利用协同控制和分段PWM的控制可以有效降低换挡时间的换挡冲击.中间一段减小了PWM,一定程度上增加了换挡时间,总时间却减少了.事实上,同步器齿形结构决定了齿轮结合时有顺齿和逆齿两种情况,顺齿可直接挂挡,几乎没有冲击,但遇上逆齿,会造成接合套反弹,大大降低了换挡效率.所以,恒PWM换挡在一定概率上时间很短,不过综合冲击、时间和同步器寿命来考虑,PWM分段控制为最优策略,结合电机工作模式的切换,有效提高了换挡效率.分为三段而不是两段或四段是由于冲击在换挡过程中部出现,三段正合适,少了会使时间增加,再多徒增控制的复杂性,降低换挡效率.5 结论1)PWM分段控制与双电机协调控制策略结合可以有效降低换挡时间和冲击,延长同步器使用寿命.2)这种方法具有普遍性,由于同步器材料和齿形的差异,结合仿真速度变化图略微标定修改PWM值即可达到不错的效果.参考文献:【相关文献】[1] 席军强,王雷,付文清,等. 纯电动客车自动机械变速器换挡过程控制[J]. 北京理工大学学报, 2010, 30(1):42-45.[2] 朱文燕.纯电动汽车的发展现状及性价比.市场经济与价格[J]. 2016,12(8):16-19.[3] 胡建军,李康力,胡明辉,等. 纯电动轿车AMT换挡过程协调匹配控制方法.中国公路学报[J]. 2012, 25(1):152-158.[4] 王阳,席军强,陈慧岩. AMT换挡冲击产生机理与对策研究.汽车工程[J]. 2009, 31(3):253-257.[5] 刘拂晓,赵韩,江昊,等. 纯电动汽车AMT换挡规律及仿真研究[J].合肥工业大学学报(自然科学版). 2013, 36(11):1281-1284.[6] 张承宁,武小花,王志福,等. 电动车辆AMT换挡过程中驱动电机控制策略.北京工业大学学报[J]. 2012, 38(3):325-329.[7] 刘正伟.电动客车无同步器AMT换挡过程控制研究[D]. 吉林:吉林大学, 2017.。
基于最优预瞄和模型预测的智能商用车路径跟踪控制
J Automotive Safety and Energy, Vol. 11 No. 4, 2020462—469基于最优预瞄和模型预测的智能商用车路径跟踪控制李耀华,刘 洋,冯乾隆,南友飞,何 杰,范吉康(长安大学汽车学院,西安710064,中国)摘要:为解决智能商用车路径跟踪问题,采用一种最优预瞄控制策略。
根据商用车航向角与路径曲率的关系,引入航向角偏差反馈控制;根据车速与预瞄距离的关系,提出了变权重因数的多点预瞄距离确定方法。
为了保证商用车路径跟踪的稳定性,采用模型预测控制策略,对车轮侧偏角进行约束。
通过TruckSim与Simulink联合仿真,对比分析了侧向偏差、横摆角速度和前轮侧偏角变化情况。
结果表明:最优预瞄控制策略对车速变化具有较好的适应性,但当路面附着因数较低时,车辆会失去稳定性;模型预测控制策略对车速和路面附着因数变化都具有较好的适应性,行驶稳定性更好,且比最优预瞄控制策略具有更精确的路径跟踪效果。
关键词:智能商用车;路径跟踪;路面附着因数;最优预瞄控制;模型预测控制中图分类号: U 471.15 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2020.04.005Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictiveLI Yaohua, LIU Yang, FENG Qianlong, NAN Youfei, HE Jie, FAN Jikang(School of Automobile, Chang’an University, Xi’an 710064, China)Abstract: An optimal preview control strategy was adopted to solved path tracking problem of intelligent commercial vehicles. According to the relationship between the heading angle and the curvature of the path,the heading angle deviation feedback control was introduced. According to the relationship between the speedand the preview distance, a multi-point preview distance determination method with variable weight coefficientwas proposed. In order to ensure the stability of path tracking, the model predictive control was used to restrictthe wheel sideslip angle. Through co-simulation of TruckSim and Simulink, the lateral deviations, the yaw ratesand the front wheel slip angles were compared. The results show that the optimal preview control has good adaptability to the speed, but when the road adhesion factor is low, the vehicle will lose stability; The model predictive control has better adaptability to speeds and road adhesion factors, and has better driving stability,and has more accurate path tracking effect than the optimal preview control.Key words:i ntelligent commercial vehicles; path tracking; road adhesion factors; optimal preview control;model predictive control收稿日期 / Received :2020-07-18。
车辆主动悬架技术的现状和发展趋势
第21卷增刊2000年8月 兵工学报A CTA A RM AM EN TA R IIV o l121Supp l1A ug1 2000车辆主动悬架技术的现状和发展趋势王国丽 顾亮 孙逢春(北京理工大学,北京,100081)摘要 主动悬架能大幅度改善悬架的性能。
本文简要地介绍了车辆主动悬架技术的现状,阐述了最优控制、自适应控制等方法,给出了流量控制和压力控制两种控制方式,并指出了主动悬架的发展方向。
关键词 车辆;主动悬架;综述中图分类号 TJ81+0.332 车辆行驶时,由路面不平等因素引起振动,影响乘坐舒适性和操纵稳定性,甚至影响行驶速度,损坏车辆的零部件和运载的货物。
同时车辆振动也是车内噪声的主要来源。
车辆减振主要是通过使用车辆悬架系统来完成。
设计或优化设计方法选择,一经选定,在车辆行驶过程中就无法进行调节,因而不能适应车辆参数、运行工况等的复杂多变。
在某个特定工况下按目标优化出的悬架系统,一旦载荷、车速和路况等发生变化,悬架在新的工况下便不再是最优。
为了克服这个缺陷,国外在50年代就提出了主动悬架的概念[1]。
主动悬架采用有源或无源可控元件组成一个闭环或开环的控制系统,根据车辆系统的运动状态和外部输入的变化(路面激励或驾驶员方向盘操作)作出反应,主动地调整和产生所需的控制力,使悬架始终处于最佳减振状态。
主动悬架由控制系统和执行机构组成,执行机构为有源液压系统的主动悬架简称全主动悬架,而无源主动悬架则简称半主动悬架。
半主动悬架由可调弹簧或可调阻尼器构成,与全主动悬架相比,最大优点是工作几乎不消耗发动机的功率,结构简单,造价较低,因此受到广泛重视[2]。
1 主动悬架系统的控制理论和方法111 最优控制由于地面对车辆的激励是一个随机的过程,所以这类研究的理论基础是线性随机最优控制理论,它通过建立系统的状态方程提出控制目标和加权系数,再应用控制理论求解所设目标下的最优控制规律。
应用于悬架控制的最优控制方法主要可分为两种:传统的线性最优控制(L inear Op ti m al Con tro l)和最优预测控制(P review Con tro l)。
AMT换挡过程发动机控制策略研究
减小换 挡 过程 冲 击 度 和 滑摩 功 , 通 过 发动 机 须
的协调控制适应传动 比的突变 , 即在换挡过程中, 通 过控制发动机转速 , 减小离合器主、 从动盘之间的转
速差 , 缩短 换 挡 时 间 , 长 离 合 器 寿 命 。A 延 MT换 挡
过程发动机控制的目标是 : 在离合器分离时 , 使发动 机转速快速调节到新挡位 时离合器从动盘的转速 ; 在摘挡、 选挡、 换挡过程中, 使发动机转速保持稳定 ; 在离合器接合时 , 控制发动机转矩与离合器传递转 矩相协调 , 使离合器主、 从动盘转速差尽量小 , 减小 滑摩 功 , 短 换挡 时间 。 缩
目前车 辆 的控制 技术 已经 完成从 各 总成 的单独
前 言
机械式 自动 变速器 ( M ) 在传统变速 器的 A T是 基 础上 , 加 自动 变 速操 纵 系 统 构 成 的 。A 增 MT以电 子 控制 单 元为 核心 , 拟驾驶 员 的操 纵 动作 , 过 控 模 通
制 离合 器 和换 挡 执 行 机 构 , 自动 完 成 离 合 器 的 分 离 与接合 及 A MT的摘 挡 、 挡 和换 挡 操 作 , 现 车 辆 选 实 起 步 和换 挡 过 程 的 自动 操 纵 u 。A 1 MT以传 动效 率
量、 提高 系统 的集 成 度 与 可靠 性 , 低 成本 , 且 有 降 而 利 于在换 挡过 程进行 发 动机 和 A T的协 调控 制 , M 减
制模 式 () b 降挡 过程
小换挡冲击 , 改善换挡 品质。此外 , 过 C N总线 通 A 实现信息共享还可在故障诊断中提供冗余信息。
21 ( 3 0 2年 第 4卷) 3期 第
汽 车 工 程 A t teE gneig uo i nier mov n
多桥转向全路面起重机操纵稳定性研究
AI tl ̄.T e MA L B Smuik s lt n mo e sa l h d a c r ig t y a c e u o' ft o D l — a l I r , h T A / i l i a o d li e tbi e c o dn d n mi q  ̄ l o OF mut s M n mn i s s o 1 8 w i xe
多桥转向各桥的转向 比关系 ,并以三桥转向为例 ,对前 轮转 向和多桥 转向在 时域 比较分析 ,其中多桥转 向采 用 零侧偏角比例控制策略。分析结果表明 ,采用零侧偏 角 比例控 制多桥 转向 ,可 以使系统 在任 意速度下 的侧偏 角 稳态值为零 ,转向过程更平稳 ;并且使横摆角速度 的稳态值 变化 范围减小 ,驾驶员操 作更舒 适 ,显著 改善 了系
通常将汽车简化为线性二 自由度模型来分析 , 着重 考察 其质 心侧偏 角 和横摆 角速 度指 标 。
取 车辆行 驶 方 向 为 轴 正 向 ,垂 直 地 面 向上 为 z 正 向 , Y轴 正 向 由右 手 法 则 确 定 。简 化 如 轴
下:
出版社 ,2O O2
安全 事故 。另外 ,桥 数 的增加 加剧 了轮 胎 的磨损 ,
—
重设备 ,它使用范围广 、作业适用性大 ,是减轻劳 动强度 、降低建设成本和提高施工速度及质量 、实
现工程 施工 机械 化不 可缺 少 的重 要装 备 。
徐 工 集 团重 型 机 械 厂 相继 推 出 的 Q Y 系列 全 A
al s ei )和 F x er g et n WS (r t he s eig 。 f n —w el t r ) o e n
中英文文献翻译-手动变速器
附录外文文献Manual transmission is the most basic of transmission of a type, its effect is changing, and provide the transmission reverse and neutral. Usually, the pilot on the clutch pedal through manipulation and in any HuanDangGan can choose between gear. There are a few manual transmission, such as motorcycles, cars, some transmission shift transmission allows only sequence, the transmission is called sequence shift transmission. In recent years, along with the electronic control components durability, computerized automatic switching clutch automatic shift of transmission in Europe since the start line are more and more popular, car Volkswagen and ford are sold in the city on the double clutch provide updated generation, transmission from the start with two clutches, every shift automatically switch to another group of clutch engagement, need not as quick as traditional in manual have only one group separated again clutch engagement, shifting speed is faster, more small change gear vibration.Internal structure: shaftDecorate a form of transmission shaft type usually have two and three shaft type two kinds. Usually a rear wheel drive car will adopt three axis type, i.e. input shaft transmission, the output shaft and oart. Input shaft front associated with engine, borrow clutch output shaft back-end through the flange and universal transmission device connected.Input shaft and the output shaft in the same horizontal line, with their oart parallel arrangement. From the input shaft power through the gears to preach to the output shaft oart again. In many input and output shaft transmission shaft could engage in together, so to power, then the gear oart called directly. Direct files through uniaxial transmission, the ratio of 1:1, the highest transmission efficiency. Even in the transmission directly, cannot offer the input shaft, and the output shaft is decorated in a straight line to reduce work needed to inherit the torque transmission.Reversing deviceGenerally speaking, the reverse gear reducer than can alsosynchronizerIn synchronized meshing gears have type synchronizer Settings, can make two gear engagement in the first, before the speed reached synchronizer in all of this manual gear transmission of the car has been usedClutch,The clutch is can make two gear with a separate with mechanical parts, two gear transmission power can be combined, but when to speed, so will depend on the first two gear clutch, change gear ratio, the two gear transmission power, continue againControl:GearIn simple terms, the high speed, low speed ShengDang when the time came Every car high speedCompared with automatic transmissionThis refers to the automatic transmission of traditional hydraulic transmission, namely through hydraulic torque converter and planetary gear transmission power automatic transmission.Advantages: transmission efficiency than automatic gearboxes for high, of course, theoretically can compare economical.maintenance will be cheaper than transmission.If you want to higher cost, can begin from both the row of convenience and high power附录外文文献的中文翻译手动变速器是汽车变速器中最基本的一种类型,其作用是改变传动比,并提供倒档和空档。
2010-基于Karush_Kuhn_Tucker最优条件的电网可疑参数辨识与估计
第34卷第1期电网技术V ol. 34 No. 1 2010年1月Power System Technology Jan. 2010 文章编号:1000-3673(2010)01-0056-06 中图分类号:TM 734 文献标志码:A 学科代码:470·4051基于Karush-Kuhn-Tucker最优条件的电网可疑参数辨识与估计曾兵,吴文传,张伯明(电力系统及发电设备控制和仿真国家重点实验室(清华大学电机工程与应用电子技术系),北京市海淀区 100084)A Method to Identify and Estimate Network Parameter Errors Based onKarush-Kuhn-Tucker ConditionZENG Bing, WU Wen-chuan, ZHANG Bo-ming(State Key Laboratory of Control and Simulation of Power Systems and Generation Equipment (Department of Electrical Engineering, Tsinghua University), Haidian District, Beijing 100084, China)ABSTRACT: Network parameter errors may strongly deteriorate the accuracy of state estimation results and affect both reliability and accuracy of other applications, thus state estimation program should possess the function to recognize and estimate element parameters. In this paper, firstly, based on Lagrangian algorithm an iterative method to identify incorrect parameters is proposed to generate branch parameter set to be modified; then a parameter estimation method based on the sensitivity of parameter to objective function, which represents how the parameters affect the quality of the state estimation solution, is researched, and for the chosen distrustful branch this method calculate the sensitivity of parameters of distrustful branch to objective function of state estimation; finally, the variable step-size successive approximation method is used to estimate the parameters of distrustful branch. This method eschews the numerical stability in traditional methods, so it is practicable. The results of IEEE 14-bus system and IEEE 30-bus systems show that the proposed method is corrective.KEY WORDS: network parameter errors identification; network parameter estimation; Karush-Kuhn-Tucker (KKT) condition摘要:电网元件参数的误差会导致能量管理系统的状态估计结果不准确,从而影响其他应用结果的可靠性和精确性,因此状态估计程序应当具有辨识和估计元件参数的功能。
采煤机牵引系统双电机功率平衡控制策略
第40卷第1期2023年1月控制理论与应用Control Theory&ApplicationsV ol.40No.1Jan.2023采煤机牵引系统双电机功率平衡控制策略贺虎成,汪沁†,张晨阳,刘博涛,桂浩亚(西安科技大学电气与控制工程学院,陕西西安710054)摘要:随着采煤机装机功率和开采能力的提升,牵引系统控制效果及动态性能已成为影响采煤机工作稳定性的重要因素.目前,采煤机电牵引系统双电机控制策略多采用传统的主从控制,其同步性能存在滞后问题,容易导致牵引电机偏载.此外,系统在控制算法方面多采用传统PI控制,对于容易发生参数摄动及负载变化频繁的牵引系统而言,传统PI控制的控制性能不佳.为提高采煤机牵引系统驱动性能并实现牵引电机功率平衡,根据采煤机牵引系统结构,本文提出了一种基于自抗扰控制的转速主从、转矩交叉耦合控制的双电机控制策略,并对控制策略进行了仿真分析和实验研究.结果表明,本文所提出控制策略实现了牵引系统功率平衡并提升了系统的控制性能.关键词:采煤机牵引系统;双电机系统;功率平衡;自抗扰控制;交叉耦合;同步技术引用格式:贺虎成,汪沁,张晨阳,等.采煤机牵引系统双电机功率平衡控制策略.控制理论与应用,2023,40(1): 121–131DOI:10.7641/CTA.2022.11122Dual motor power balance control strategy for shearer traction systemHE Hu-cheng,WANG Qin†,ZHANG Chen-yang,LIU Bo-tao,GUI Hao-ya (School of Electrical and Control Engineering,Xi’an University of Science and Technology,Xi’an Shaanxi710054,China) Abstract:With the rapid development of the installed power and mining capacity,the control effect and dynamic per-formance of the traction system have seriously influenced the working stability of the shearer.Although the traditional master-slave control is widely applied in the dual-motor traction control of the shearer,it has caused the lagging of synchro-nization performance and can lead to unbalanced state of the traction system.Besides,for traction systems of the shearer which parameters are subject to perturb and load is easily to disturb,PI(proportional-integral)control may not achieve desired performance due to the structural limitation of PI controllers.To enhance the performance of traction system of the shearer and achieve the power balance of the traction dual-motor,according to the structure of traction system,a novel dual-motor control strategy based on active disturbance rejection control is proposed in this paper,which speed control adopt master-slave mode and torque control use cross-coupling model.The proposed control strategy and the traditional PI control are compared and verified by simulation and experiment.The results of simulation and experiment demonstrate that the proposed control strategy has realized the power balance of the traction motors and improved the control performance of the system.Key words:shearer traction unit;dual-motor system;power balance;active disturbance rejection control;cross cou-pling;synchronization techniquesCitation:HE Hucheng,WANG Qin,ZHANG Chenyang,et al.Dual motor power balance control strategy for shearer traction system.Control Theory&Applications,2023,40(1):121–1311引言采煤机作为煤矿生产中最重要的设备之一,其发展不仅影响煤炭的生产和开采效率,而且决定煤矿产业的安全和未来发展.牵引系统是负责驱动采煤机行走的重要机构,其动力一般由两台大功率异步电机提供[1–3].采煤工作面工况及煤层品质多变,会导致牵引系统负载剧烈振荡等问题;由于制造工艺不同,即便采用同型号电机也很难保证参数完全一致;井下空间狭小,散热条件差,难免会引起牵引电机发热运行,导致电机机械特性发生变化.这些原因均会造成牵引系统负载分配失衡,进而引发电机欠载或过载.欠载电机甚至会成为另一台电机的负载,致使两机功率差值更大,严重可能导致电机烧毁,整机运行效率及可靠性得不到保障,影响采煤机安全运行[4–6].收稿日期:2021−11−16;录用日期:2022−04−21.†通信作者.E-mail:*****************;Tel.:+86181****4350.本文责任编委:赵千川.陕西省自然科学基础研究计划–陕煤联合基金项目(2019JLM–51)资助.Supported by the Natural Science Basic Research Program of Shaanxi-Shanmei Joint Fund(2019JLM–51).122控制理论与应用第40卷牵引系统中,电机与轨道之间通过多级齿轮组实现传动,类似于双电机刚性联接系统.目前已有很多学者对于双、多电机系统进行了大量研究.文献[7]介绍了目前多电机的主流控制策略,包括并行控制、主从控制、交叉耦合控制.文献[8]解决了正常情况下双永磁同步电机刚性齿轮传动的功率平衡问题,但未研究电机参数摄动造成功率失衡的问题.文献[9]中Chen 等人提出了二阶滑模双永磁同步电机同步控制策略,实现了系统的速度同步.文献[10]对文献[9]的策略进行了改进,控制效果更好,但同样基于永磁同步电机展开研究.文献[11–12]研究了弹性连接的双电机系统因电机机械特性及负载随机变化而造成的功率失衡问题,但该方法不适用于刚性传动系统.目前,在控制算法方面,牵引系统多采用传统PI 控制方式,无法解决参数摄动带来的影响.自抗扰控制技术[13–14]是韩京清教授提出的一种新型控制方法,其核心思想是利用扩张状态观测器(extended state observer,ESO)观测和补偿系统的内外干扰,以克服系统因内部参数和外部环境变化带来的影响.文献[15–16]将该技术应用于异步电机矢量控制系统,在一定程度上解决了参数造成的影响.文献[17]将该技术应用于三电机速度同步控制系统中并获得了优秀的控制效果,但未详细讨论电机的功率平衡问题.文献[18]提出了一种基于二阶自抗扰控制器的三电机同步系统控制方案,一定程度上提高了系统的抗干扰能力,但该方案主要用于解决电机之间张力耦合引起的问题.文献[19]提出了一种自校正速度补偿器与改进型自抗扰控制器结合的新型控制策略,该方法改善了多电机协同控制系统的滞后、抗干扰能力弱等问题,但未在实验中验证可行性.鉴于此,本文提出了一种基于自抗扰控制的牵引系统双异步电机转矩交叉耦合控制策略,图1为采煤机牵引系统控制策略原理框图.针对参数摄动及负载扰动造成的功率失衡问题,从控制策略和控制算法两方面研究.首先基于交叉耦合控制思想设计了转矩同步控制器,将两电机转矩差乘以耦合同步系数K 再补偿到各台电机电流环,提高系统受负载或参数变化扰动后的同步性和系统快速恢复性.在此基础上设计了自抗扰速度、转矩、电流和磁链控制器.最后,对本文提出的控制策略结合实际工况进行了仿真和实验验证,结果证实了该控制策略的有效性.图1采煤机牵引系统控制策略原理框图Fig.1The principle block diagram of the control strategy of the shearer traction system由于两台电机的转速被强制同步,因此设计两电机共用一个转速环,速度采用主从控制[20].电机M1对应回路1,磁链和转速采用外环控制,电流采用内环控制.电机M2回路不设转速环,将M1转速环输出的给定转矩T ∗e 送给M2,再通过转矩调节器调节系统转矩在稳态输出时达到平衡.为使系统对转矩响应更加迅速,控制策略将交叉耦合控制思想[21]应用于转矩环,K 1、K 2为转矩的补偿系数.将两台电机的转矩差经转矩补偿系数K 1和K 2输入到两电机的转矩调节器,其中电机M1为负反馈,电机M2为正反馈.转矩补偿器可防止一台电机因故障而停机时,另一台电机单独承担系统的全部负载而过载运行,导致电机烧毁引起更大的损失.2牵引系统模型2.1牵引系统双电机数学模型建立牵引系统数学模型时,做如下假设:1)假设电机与连接齿轮之间的耦合轴较短;2)忽略旋转结构的弹性力矩;3)忽略齿轮传动中的齿隙及传输功率损耗.将齿轮与电机视为一个整体,则牵引电机通过销轮齿轮把驱动转矩传递给销轨齿轮,进而驱动负载运动,图2为牵引系统双电机驱动结构图[22],齿轮和负载的主要参数见表1.第1期贺虎成等:采煤机牵引系统双电机功率平衡控制策略123图2牵引系统双电机驱动结构Fig.2Double-motor drive structure of traction system表1齿轮和负载的主要参数Table1The main parameters of gear and load符号符号含义单位k g,k g1,k g2销轨,销轮齿轮刚度系数N/mB g,B g1,B g2销轨,销轮齿轮阻尼系数(N·s)/mT g,T L销轨齿轮转矩,总负载转矩N·mJ g负载转动惯量kg·m2T l1,T l2电机M1,M2负载转矩N·mr g,R g销轨,销轮齿轮半径mωg,ω1,ω2销轨,电机M1,M2转速r/minθ1,θ2,θg销轮1,销轮2,销轨齿轮位置rad由图中所示传动系统原理,根据功率守恒原理,推导出销轨和负载系统的运动方程为T g=B gωg+T L+J Ln pdωgd t.(1)结合式(1),根据齿轮间转矩传递关系和电机运动方程,可得牵引系统双电机驱动运动方程为J1n pdω1d t=T e1−T l1−B1ω1,J2n pdω2d t=T e2−T l2−B2ω2,J Ln pdωgd t=T g−T L−B gωg,T g=R gr g(T l1+T l2),(2)式中:T l1=K g1r g(r gθ1−R gθg)−B g1r g(r g˙θ1−R g˙θg), T l2=K g2r g(r gθ2−R gθg)−B g2r g(r g˙θ2−R g˙θg).刚性联接条件下,两台电机的转速强制相等,则两电机的角速度和销轨齿轮的角速度满足以下关系式:ω1=ω2=R gr gωg.(3)根据式(3),可得J1 n p dω1d t=T e1+T e2−B1ω1−B2ω2−J2n pdω2d t−r g R g (J Ln pdωgd t+T L+B gωg).(4)将上式改写为J1n pdω1d t=T e1+T e2−(B1+B2)ω1−J2n pdω1d t−r gR g(J Ln pr gR gdω1d t+T L+B gr gR gω1).(5)则刚性传动条件下牵引系统运动方程简化为dω1d t=[1g1(T e1+T e2)−g2g1ω1−r gg1R gT L]n p.(6)式中:g1=J1+J2+J Lr2gR2g,g2=B1+B2+B gr2gR2g.取销轮、销轨齿轮半径相同来简化系统,则g1=J1+J2+J L,g2=B1+B2+B g.(7)同时忽略阻尼系数,则式(6)可进一步简化为dω1d t=[1g1(T e1+T e2−T L)−g2g1ω1]n p.(8)转矩与功率的关系为{T e1=P1/ω1,T e2=P2/ω2,T L=P L/ωr=(P1+P2)/ωg.(9)据前文所述,ω1=ω2,又由于等效的销轮齿轮与销轨齿轮半径相同,则结合式(9)可得T L=T e1+T e2.(10)由上式可知,系统功率平衡问题即转化为电机转矩平衡问题.根据式(10)简化后的三相异步电机在d–q 坐标系下的动态数学模型[23]以及带转矩闭环的控制方式,得牵引系统的数学模型为˙ω1=[1g1(T e1+T e2−T L)−g2g1ω1]n p,˙ψrd1=L m1T r1i sd1−1T r1ψrd1,˙isd1=−k M11i sd1+k M12ψrd1+ω1i sq1+1σ1u sd1,˙isq1=−k M11i sq1−L m1σ1L r1ψrd1ωr1−ω1i sd1+1σ1u sq1,T e1=n p L m1L r1i sq1ψrd1,˙ψrd2=L m2T r2i sd2−1T r2ψrd2,˙isd2=−k M21i sd2+k M22ψrd2+ω1i sq2+1σ2u sd2,˙isq2=−k M21i sq2−L m2σ2L r2ψrd2ωr2−ω1i sd2+1σ2u sq2,T e2=n p L m2L r2i sq2ψrd2,(11)124控制理论与应用第40卷式中:k 1=(R s L 2r +R r L 2m )/(σL 2r ),k 3=(n 2p L m )/(JL r ),T r =L r /R r ,σ=L s −L 2m /L r .2.2牵引系统机械负载动力学模型由于牵引系统近似为刚性联接,根据牵引系统数学模型,忽略弹性力矩联接结构的数学方程可表述为d ωrd t =1g 1(T 1+T 2−T L ),(12)即T 1+T 2−T L =(J 1+J 2+J m )d ωrd t,(13)式中:T 1,T 2为两台电机输出转矩;T L 为负载转矩,单位N ·m;J m 为两台电机转动惯量;J 1,J 2为负载转动惯量,单位kg ·m 2;ωr 为系统旋转角速度,单位r/min.上式进行Laplace 变换,可得ωr (s )=T 1(s )+T 2(s )−T Ls (J 1+J 2+J m ).(14)3牵引系统自抗扰控制器设计3.1速度环设计考虑传动轴较短,忽略牵引系统电气传动中的扭转弹性转矩.由牵引系统数学模型得到速度环的数学方程为˙ωr =[1g 1(T e1+T e2−T L )−g 2g 1ωr ]n p ,(15)式中:T L 为总负载、g 1为转动惯量、g 2为阻尼系数,其值均随工况的不同而变化,形成未知扰动.根据自抗扰控制器的特点,将式(15)所示的速度环数学模型改写为˙ωr =n p g 1T ∗e −n pg 1(T L +g 2ωr ),(16)式中速度环的输出为电磁转矩给定值T ∗e .自抗扰速度控制器由扩张状态观测器、跟踪微分器(tracking differentiator,TD)和非线性状态误差反馈控制律(nonlinear states error feedback control laws,N-LSEF)组成.3.1.1跟踪微分器离散系统TD 的状态方程为{x 1(k +1)=x 1(k )+T x 2(k ),x 2(k +1)=x 2(k )+T u,(17)式中T 为采样时间.u =Fst(x 1(k )−v (k ),x 2(k ),r,h )=−{ra /d,|a | d,r sgn(a ),|a |>d,(18)式中:r 为跟踪因子,其值越大跟踪速度越快,但过大会导致超调量增大;h 为滤波参数,其值越大滤波效果越好,但过大会导致系统振荡.将式(18)代入状态方程,可得x 1(k +1)=x 1(k )+T x 2(k ),x 2(k +1)=x 2(k )+T Fst[x 1(k )−v (k ),x 2(k ),r,h ].(19)3.1.2扩张状态观测器基于原系统状态变量,(x 1,x 2)将外扰表现量作为新的未知变量扩展出新状态,(x 3)则原系统可转为如下线性系统˙x 1=x 2,˙x 2=x 3+bu,˙x 3=˙f (x 1,x 2,w (t ),t )=w 0(t ),y =x 1.(20)根据上式建立非线性扩张状态观测器为ε=z 1−y,˙z 1=z 2−β01ε,˙z 2=z 3−β02Fal(ε,1/2,δ)+bu,˙z 3=−β03Fal(ε,1/4,δ),(21)式中:δ为线性区间,误差小时可避免高增益引起的高频震颤;β01、β02正比于估计收敛速度,但取值过大会导致ESO 的输出振荡发散,同时产生高频噪声信号.取非线性组合函数Fal 为Fal(ε(t ),α,δ)={|ε(t )|αsgn(ε(k )),|ε(t )|>δ,ε(t )/δα−1,|ε(t )| δ,(22)式中:α∈(0,1),α越小,Fal 函数非线性越强.若式(21)中b 已知,则ESO 的输出可以跟踪系统的状态变量输入,并且具有较大的适应范围.则扩张状态观测器离散表达式可表示为ε(k )=z 1(k )−y (k ),z 1(k +1)=z 1(k )−T β01Fal(ε(k ),α,δ),z 2(k +1)=z 2(k )+T [z 3(k )−β02Fal(ε(k ),α,δ)+bu (k )],z 3(k +1)=z 3(k )−T β03Fal(ε(k ),α,δ).(23)3.1.3非线性误差反馈控制律根据TD 和ESO 的输出,将NLSEF 构造为e 1(k )=x 1(k )−z 1(k ),u 0(k )=β1Fal(e 1(k ),α1,δ1),u (k )=u 0(k )−z 2(k )/b,(24)式中:取0<α1<1,δ1=1,其与ESO 中的α和δ作用相似.β1越大系统响应速度越快,同样,若取值过大会导致系统振荡.图3所示为自抗扰速度控制器的结构框图.由牵引系统数学模型知,环路采用一阶自抗扰控制器即可满足要求,扩张状态观测器则采用二阶模型.式(16)中,w 0(t )=−n p /g 1(T L +g 2ωr )为扰动,ωr 为耦合项,该项可能是受到另一电机,负载或机械结第1期贺虎成等:采煤机牵引系统双电机功率平衡控制策略125构影响而产生.采用ESO 估计和补偿扰动[24],为减轻ESO 负担,将f 0(ˆωr (k ))=−g 2ωr n p /g 1视为控制对象的已知模型.仅估计未知模型,重新构造ESO 可得如下表达式:ε0(k )=ˆωr (k )−ωr (k ),ˆωr (k +1)=ˆωr (k )+T [z 0(k )−β01Fal(ε0(k ),α,δ)+f 0(ˆωr (k ))+b 0T ∗e (k )],z 0(k +1)=z 0(k )+β02Fal(ε0(k ),α,δ),(25)式中:b 0=n p /g 1,ωr 为实际转速,ˆωr 为ωr 跟踪值.经ESO 处理,实现输出z 0跟踪系统的未知扰动.设计相应跟踪微分器,速度环安排过渡过程的表达式为¯ωr (k +1)=¯ωr (k )+T x 02(k ),x 02(k +1)=x 02(k )+T Fst[¯ωr (k )−ω∗r (k ),x 02(k ),r,h ],(26)式中:ω∗r 为给定转速,¯ωr 为给定转速跟踪值.通过TD 的输出和ESO 的估计,可得系统状态变量误差.将误差输入NLSEF,将其输出与扩张状态观测器的补偿相加,得到被控对象的控制量.最后,将NL-SEF 重构并设计为e 0(k )=¯ωr (k )−ˆωr (k ),u 0(k )=β1Fal(e 0(k ),α1,δ1),T ∗e(k )=u 0(k )−[z 0(k )+f 0(ˆωr (k ))]/b 0.(27)图3ADRC 速度控制器结构框图Fig.3Structure block diagram of ADRC speed controller3.2转矩环设计转子磁场定向的同步旋转正交坐标系下,牵引电机的电磁转矩表达式为T e =n p L mL ri sq ψrd .(28)令b 1=n p L m ψrd /L r ,可将式(28)改写为T e =b 1i sq .(29)恒转矩矢量控制系统中,转子磁链通常取为常数,用给定磁链值ψ∗rd代替实际值ψrd 来简化计算.取b 1为常数,可通过离线计算得到具体值.转矩环设计与速度环类似,详细过程不再赘述.3.3电流环设计d,q 轴电流环设计与速度环设计类似,详细设计过程不赘述.由牵引电机数学模型可得转矩电流与磁链电流方程为 ˙isd =−k 1i sd +k 2ψrd +ωr i sq +1σu sd ,˙i sq =−k 1i sq −L m σL r ψrd ωr −ω1i sd +1σu sq .(30)令w 1(t )=−L m ψrd /(σL r )−ω1i sd 为q 轴电流环的系统扰动,ψrd 和i sd 构成耦合项.改写上式为˙isq =−k 1i sq +w 1(t )+b 2u sq ,(31)式中:b 2=1/σ,ESO 用于实时估计和补偿w 1(t ),可得到系统未建模的动态观测值.为降低ESO 的负担,取f 1(ˆi sq (k ))=−k 1i sq 作为已知模型.令w 2(t )=R r L m ψrd /(σL 2r )+ωr i sd 为d 轴电流环的系统扰动.ωr ,i sq 和转子电阻R r 构成耦合项,当电机温度升高、频率变化时,这些参数会发生变化,且影响磁链闭环子系统的控制效果,造成整个系统控制性能变差.用ESO 对w 2(t )实时估计和补偿,则上式中磁链电流方程改写为˙isd =−k 1i sd +w 2(t )+b 3u sd .(32)式中:b 3=1/σ,取f 2(ˆi sd (k ))=−k 1i sd 为已知模型.3.4磁链环设计将磁链方程改写为˙ψrd =b 4i sd −1T rψrd ,(33)式中:b 4=L m /T r ,取f 3(ˆψrd (k ))=−ψrd /T r 为已知模型.磁链环设计也类似速度环,详细过程不赘述.4采煤机牵引系统仿真研究以MATLAB/Simulink 为平台搭建仿真.采用两台参数如表2所示的三相鼠笼式异步电机,通过矢量控制来控制电机转速,模拟采煤机牵引工况.表2仿真用异步电机参数Table 2Asynchronous motor parameters for sim-ulation参数/单位数值参数/单位数值P N /kW 37.3J/(kg ·m 2)1.662U N /V 380T eN /(N ·m)310f N /Hz 50n p2R s /Ω0.087n N /(r ·min −1)1146R r /Ω0.228L s /mH 35.5L m /mH34.7−−4.1正常牵引工况仿真分析采煤机负载随煤层品质及销轮与销轨配合情况变化,正常情况下波动范围为±5.53%.因采煤机机身重量可达数十吨,系统相当于带载起动,因此起动时施加50N ·m 的恒定负载模拟.工况一煤层品质好,系统轻载起动,系统以额定转速驱动采煤机运行.假设:1.5s 遇到煤层,施加200126控制理论与应用第40卷±5.53%(N·m)的负载信号;2s 遇到采空区减载运行.图4(a)–(b)为PI 和ADRC 控制系统下两电机转矩波形,图4(c)–(d)为转速与转矩差波形.由图4(c)知,达到额定转速前ADRC 系统几乎无超调,PI 系统有一定超调.1.5s 遇到煤层时PI 系统无法达到给定转速,而ADRC 系统仅在给定转速附近有小波动.由图4(d)知,系统起动及加减载时ADRC 系统转矩平衡效果优于PI 系统.(a)PI系统转矩(b)ADRC系统转矩(c)转速对比(d)转矩差对比图4工作在工况一的系统响应Fig.4System response in working condition 1工况二煤层品质较差,采煤机起动时截割系统立即割煤,系统重载起动.牵引电机先低于额定转速驱动采煤机,待较差煤层采空后加至额定转速.假设系统负载400±10%(N ·m)起动.图5(a)–(d)分别为PI,ADRC 系统下两台电机转矩,两种系统转速和转矩同步误差.ADRC 控制下,采煤机0.93s 达给定转速746r/min;PI 系统1.4s 近似到达;2s 时负载减小,采煤机持续负载较小,即遇到空煤层.3s 时给定转速提至额定值,采煤机加速运行.ADRC 系统无超调达到额定转速,PI 系统经一定超调后达到额定值.说明重载起动时ADRC 系统比PI 系统的动态性能更好,误差更小,高、低速下都能很好的保持系统平稳运行.(a)PI系统转矩(b)ADRC 系统转矩(c)转速对比(d)转矩差对比图5工作在工况二的系统响应Fig.5System response in working condition 2第1期贺虎成等:采煤机牵引系统双电机功率平衡控制策略1274.2电机参数摄动仿真分析采煤机长时间运行,散热条件差,常导致电机发热.情况严重会使电机转子电阻增至1.5倍.4.2.1电机M1转子电阻变为1.5倍图6(a)–(b)为M1转子电阻变化时系统转速波形,图6(c)–(d)为转矩差值波形.系统轻载起动,2s 时施加200N ·m 负载,3s 时将负载减至50N ·m.(a)PI系统转矩(b)ADRC系统转矩(c)PI系统转矩差(d)ADRC 系统转矩差图6电机M1转子电阻变为1.5倍的系统响应Fig.6System response when the rotor resistance of the motorM1becomes 1.5times显然ADRC 动态性能更好,转速几乎无变化,转矩差在起动及加减载时较小波动.但PI 方式下,转速在2s 加载后无法达到给定值,与正常工况相比转速差值和电磁转矩差值更大,无法满足功率平衡要求.4.2.2电机M2转子电阻变为1.5倍图7(a)–(b)为电机M2转子电阻变化时系统转速波形.PI 系统转速变化较大,施加负载时转速偏离严重,ADRC 控制性能较为理想.图7(c)–(d)为转矩差值波形,ADRC 系统在起动和加减载时有较小波动,但PI 系统下,起动阶段M2承担较大负载,0.6s 时波动剧烈,转矩差变化量达150N ·m,可能会导致传动机构损坏;加载时M1明显会多承担40N ·m 负载,不满足对功率平衡的要求.5实验研究5.1实验平台设计与实现本文所搭建采煤机牵引系统实验平台的硬件结构如图8所示.由于实验室条件限制,采用两台功率均为1.1KW 的异步电机搭建实验平台,两台电机用同轴相连的方式模拟牵引系统,电机引出轴连接处安装磁粉制动器.电机详细参数如表3所示,实物图如图9所示.(a)PI系统转速(b)ADRC系统转速(c)PI 系统转矩差128控制理论与应用第40卷(d)ADRC 系统转矩差图7电机M2转子电阻变为1.5倍的系统响应Fig.7System response when the rotor resistance of the motorM2becomes 1.5times5.2验证系统性能实验5.2.1矢量控制解耦性能验证将两台电机的联轴器断开,图10为其中一台电机在矢量控制方式下的转矩电流和励磁电流的波形,当电机从空载起动并以864r/min 的给定转速平稳运行后,分别在t 1,t 3,t 5时刻向系统施加负载,并在t 2,t 4,t 6时刻卸去负载.转矩电流在负载增大和减小时的变化明显,而励磁电流在负载变化时的波动较小,说明实现了电流解耦.图8牵引系统实验平台的硬件结构Fig.8The hardware structure of the traction system experimental platform表3异步电机参数Table 3Parameters of asynchronous motor参数/单位数值参数/单位数值P N /kW 1.1J/(kg ·m 2)0.0087U N /V 380T eN /(N ·m)7.5f N /Hz 50n p2R s /Ω6.75n N /(r ·min −1)1400R r /Ω5.82L s /mH 223L m /mH223I N /A2.75.2.2系统起动实验设置电机空载起动,且给定转速为864r/min,图11(a)–(b)分别为PI,ADRC 控制方式下的起动转速波形对比.采用PI 控制起动时转速有超调,而采用自抗扰控制策略后,达到给定转速前几乎无超调,且纹波较小,说明自抗扰控制具有更好的性能.5.2.3系统加减载实验当两个系统达到给定转速后,设在t 1时刻突加10N ·m 负载,并在t 2时刻卸去该负载,图11(c)–(d)所示为此时系统转速响应.采用PI 控制时,在加减载瞬间转速受到的影响较大;而采用ADRC 控制时,在加减载时转速基本不受影响,说明其具有较好的抗干扰能力.图9小功率牵引系统实验平台Fig.9Experimental platform of low-power traction systemexperimental platform第1期贺虎成等:采煤机牵引系统双电机功率平衡控制策略129图10转矩电流与励磁电流Fig.10Torque current and excitation current experimental platform5.3牵引工况模拟实验5.3.1系统转速响应图12(a)为ADRC系统转速波形,系统在小负载下起动,给定转速为600r/min.在t1时刻给系统施加10N·m附近变化的随机负载,并在t2时刻减载;在t3时刻将给定转速调整至864r/min;系统再次达到给定转速后,在t4时刻施加平均为5N·m的随机负载.可以看出ADRC系统达到给定转速无超调,加减载过程平滑,速度没有明显变化,满足控制要求.5.3.2系统起动时电流响应为了验证系统运行时能否实现两台电机输出功率平衡,可以通过对比转矩电流来判断.图12(b)–(c)为电机起动时的电流波形,其中图12(b)为空载起动,图12(c)为加载起动.在电机由起动达到给定转速的过程中,转矩电流差距不大,表明该系统在运行时实现了功率平衡.图11系统转速响应Fig.11Speed response of thesystem130控制理论与应用第40卷图12模拟牵引工况实验Fig.12The experimental of simulated traction conditions5.3.3加减载及提速时电流响应实验中,通过控制磁粉制动器供电电流在一定范围内随机变化来模拟随机负载.系统在给定转速600r/min 下起动,运行平稳后,在t 1时刻施加10N ·m 附近随机变化的负载,并在t 2时刻卸载.在t 3时刻,将给定转速提升至864r/min.如图12(d)所示,无论是加载还是加速时,两台电机的转矩电流基本相等.通过对比转矩电流,说明两电机输出转矩相同,实现了系统的功率平衡.图13(a)为施加随机负载并减载时两台电机的A 相电流情况;图13(b)为加载区域放大图,图13(c)为减载区域放大图.可以看出电流基本相等.图13(d)为加载起动时两台电机的A 相电流值,放大后如图13(e)所示.由图可知,在加载起动下A 相电流值相等,通过相电流波形,侧面验证了两电机的功率平衡.(a)加减载A相电流(b)局部放大区域1(c)局部放大区域2(d)加载启动A相电流值(e)局部放大图图13随机负载时,两台电机A 相电流波形Fig.13A-phase current waveform of two motors underrandom load6结论本文针对采煤机牵引系统由于负载突变,参数摄动及参数不一致而造成双电机功率失衡的问题,提出了一种基于自抗扰控制的牵引系统双电机转矩交叉耦合控制策略.与传统的PI 控制策略相比,本文所提出的控制策略在保证控制性能良好的基础上,有效降低了系统负载扰动对速度控制效果的影响,且提高了系统的鲁棒性和动态响应能力,降低了系统偏载的风险.根据采煤机的实际工况进行了仿真分析和实验研究,结果验证了所提控制策略,实现了采煤机牵引系统的功率平衡,并具有较强的抗扰性能.参考文献:[1]ZHAO Lijuan,TIAN Zhen,LIU Xunan,et al.Simulation analysisof load characteristics of thin seam shearer drum.Journal of System Simulation ,2015,27(12):3102–3108.(赵丽娟,田震,刘旭南,等.薄煤层采煤机滚筒载荷特性仿真分析.系统仿真学报,2015,27(12):3102–3108.)[2]GE Shirong.The development history of coal shearer technology(Part three)–electrical motor driven shearer.China Coal ,2020,46(8):1–15.(葛世荣.采煤机技术发展历程(三)–—电牵引采煤机.中国煤炭,2020,46(8):1–15.)第1期贺虎成等:采煤机牵引系统双电机功率平衡控制策略131[3]WANG Duo.Development of high adaptability haulage system forhigh-power shearer.Coal Mine Machinery,2015,36(11):61–63.(王夺.高适应性大功率采煤机牵引变频调速系统的研制.煤矿机械, 2015,36(11):61–63.)[4]XIE Guijun.Current situation and development of electricity tractionshearer.Coal Mine Machinery,2009,30(2):1–3.(谢贵君.电牵引采煤机的现状与发展趋势.煤矿机械,2009,30(2): 1–3.)[5]TIAN Shengwen,YANG Dongwei,TIAN Hua.Analysis and re-search on the failure of the shearer travel box.Coal Mine Machinery, 2013,34(1):276–278.(田生文,杨东伟,田华.采煤机行走箱故障分析与研究.煤矿机械, 2013,34(1):276–278.)[6]ZHOU Di,ZHANG Xufang,YANG Zhou,et al.Dynamic reliabilityanalysis of the transmission system of the traction unit of the shearer.Journal of China Coal Society,2015,40(11):2546–2551.(周笛,张旭方,杨周,等.采煤机牵引部传动系统动态可靠性分析.煤炭学报,2015,40(11):2546–2551.)[7]VEDRANA JˇS,TONI V,TIN B,et al.A survey of fuzzy algorithmsused in multi-motor systems control.Electronics,2020,9(11):1788.[8]GENG Qiang,SHAN Changshuai,LIU Tao,et al.Torque balancecontrol of dual-motor rigid gear transmission system.Transactions of the Chinese Society of Electrical Engineering,2017,32(15):17–26.(耿强,单长帅,刘涛,等.双电机刚性齿轮传动系统转矩均衡控制.电工技术学报,2017,32(15):17–26.)[9]CHEN W,WU Y,DU R,et al.Speed tracking and synchroniza-tion of a dual-motor system via second order sliding mode con-trol.Mathematical Problems in Engineering,2013,2013:DOI:10.1155/2013/919837[10]ZHU C,TU Q,JIANG C,et al.A cross coupling control strategy fordual-motor speed synchronous system based on second order global fast terminal sliding mode control,IEEE Access,2020,8:217967–217976.[11]LI Yanwei,LI Xiaofan.Study on power imbalance driven by two ma-chines of scraper conveyor.Coal Engineering,2013,45(10):86–88.(李艳伟,李小凡.刮板输送机两机驱动下功率不平衡研究.煤炭工程,2013,45(10):86–88.)[12]MAO Jun,CAO Hao,XIE Miao,et al.Research on power balancecontrol of double-motor variable frequency drive of scraper convey-or.Control Engineering,2017,24(12):2520–2525.(毛君,曹昊,谢苗,等.刮板输送机双机变频驱动功率平衡控制研究.控制工程,2017,24(12):2520–2525.)[13]HAN Jingqing.From PID technology to“ADRC”technique.ControlEngineering,2002,9(3):13–18.(韩京清.从PID技术到“自抗扰控制”技术.控制工程,2002,9(3):13–18.)[14]GAO Zhiqiang.Exploration of active disturbance rejection controlthought.Control Theory&Application,2013,30(12):1498–1510.(高志强.自抗扰控制思想探究.控制理论与应用,2013,30(12): 1498–1510.)[15]FENG Guang,HUANG Lipei,ZHU Dongqi.High-performanceasynchronous motor speed control system using active disturbance rejection controller.Proceedings of the Chinese Society for Electrical Engineering,2001,21(10):56–59,121.(冯光,黄立培,朱东起.采用自抗扰控制器的高性能异步电机调速系统.中国电机工程学报,2001,21(10):56–59,121.)[16]SU Weifeng,SUN Xudong,LI Fahai.Vector control of asyn-chronous motor based on active disturbance rejection controller.Jour-nal of Tsinghua University(Natural Science Edition),2004,44(10): 1329–1332.(苏位峰,孙旭东,李发海.基于自抗扰控制器的异步电机矢量控制.清华大学学报(自然科学版),2004,44(10):1329–1332.)[17]LIU Xingqiao,TANG Lin,ZHU Liting.Three-motor synchronouscoordinated system based on fuzzy active disturbance rejection con-trol.Journal of Electrical Machines and Control,2013,17(4):104–109.(刘星桥,唐琳,朱丽婷.模糊自抗扰控制的三电机同步协调系统.电机与控制学报,2013,17(4):104–109.)[18]LIU Xingqiao,TANG Lin,ZHOU li.Second-order active distur-bance rejection controller applied in three-motor synchronous sys-tem.Transactions of the Chinese Society of Electrical Engineering, 2012,27(2):179–184.(刘星桥,唐琳,周丽.二阶自抗扰控制器在三电机同步系统中的应用.电工技术学报,2012,27(2):179–184.)[19]WANG Xinyang,LIU Yachao,ZHONG Yongbin,et al.Multi-motorcoordinated system based on self-correction active disturbance re-jection control.Modular Machine Tool&Automatic Manufacturing Technique,2021,564(2):77–81.(汪昕杨,刘亚超,钟永彬,等.基于自校正自抗扰控制的多电机协同系统.组合机床与自动化加工技术,2021,564(2):77–81.)[20]TORRES F J,GUERRERO G V,GARCIA C D,et al.Master-slavesyn-chronization of robot manipulators driven by induction motors.IEEE Latin America Transactions,2016,14(9):1–6.[21]LI Zheng,XIAO Yu,SUN Hexu,et al.Two-axis linear motor cross-coupling control strategy based on speed prospecting.Transactions of the Chinese Society of Electrical Engineering,2021,36(5):973–983.(李争,肖宇,孙鹤旭,等.基于速度前瞻的双轴直线电机交叉耦合控制策略.电工技术学报,2021,36(5):973–983.)[22]SHI Tingna,YANG Yuyao,ZHOU Zhanqing,et al.Finite set modelpredictive control of dual-motor torque synchronization system based on quadratic value function.Proceedings of the CSEE,2019,39(15): 4531–4541.(史婷娜,杨雨要,周湛清,等.基于二次型价值函数的双电机转矩同步系统有限集模型预测控制.中国电机工程学报,2019,39(15): 4531–4541.)[23]ZHANG Chunxi,LIAO Wenjian,WANG Jiazi.Simulation analysisof asynchronous motor SVPWM vector control.Journal of Electrical Machines and Control,2008,12(2):160–163,168.(张春喜,廖文建,王佳子.异步电机SVPWM矢量控制仿真分析.电机与控制学报,2008,12(2):160–163,168.)[24]LEI Chunlin,WU Jie,CHEN Yuanrui,et al.Auto-disturbance-rejection controller used in permanent-magnet linear motor control system.Control Theory&Applications,2005,22(3):423–428.(雷春林,吴捷,陈渊睿,等.自抗扰控制在永磁直线电机控制中的应用.控制理论与应用,2005,22(3):423–428.)作者简介:贺虎成博士,目前研究方向为运动控制技术、电力电子技术、智能自动化装置、电能质量分析与控制等,E-mail:************;汪沁硕士研究生,目前研究方向为电力电子技术,E-mail:220 **************;张晨阳硕士研究生,目前研究方向为电力电子技术,E-mail:zcy **************;刘博涛硕士研究生,目前研究方向为电力电子技术,E-mail:183 ****************;桂浩亚硕士研究生,目前研究方向为电力电子技术,E-mail:814 *************.Copyright©博看网. All Rights Reserved.。
AMT换挡冲击控制策略的优化方案
AMT换挡冲击控制策略的优化方案
冯文杰;袁小丽;陈莹莹;王邵明;段红尊
【期刊名称】《四川兵工学报》
【年(卷),期】2014(000)011
【摘要】介绍了机械式自动变速器( AMT)换挡冲击的产生原因,主要有机械、油路、电路三方面的故障原因引起的冲击和自身结构、工作原理引起的动力中断而产生的换挡冲击;总结了目前国内外针对AMT换挡动力中断问题的研究进展及解决方案,大多数学者专家都是通过改善动力传动系统结构或者从控制策略上进行优化;最后综合国内外的研究现状,提出了AMT换挡冲击控制策略的优化应从发动机、离合器、变速器的综合控制、采用模糊-神经网络控制、增强控制系统的软件功能以及采用高速运算器、电动执行器四方面展开研究。
【总页数】4页(P110-113)
【作者】冯文杰;袁小丽;陈莹莹;王邵明;段红尊
【作者单位】重庆理工大学机械工程学院;重庆理工大学车辆工程学院,重庆400054; 清华大学苏州汽车研究院吴江,江苏苏州 215200;重庆理工大学车辆工程学院,重庆 400054;清华大学苏州汽车研究院吴江,江苏苏州 215200;重庆理工大学机械工程学院
【正文语种】中文
【中图分类】TB1
【相关文献】
1.AMT换挡冲击产生机理与对策研究 [J], 王阳;席军强;陈慧岩
2.基于极小值原理的AMT车辆起步最优协调控制策略 [J], 赵克刚;宁武林;叶杰
3.基于极小值原理的AMT车辆起步最优协调控制策略 [J], 赵克刚;宁武林;叶杰
4.纯电动汽车AMT换挡控制策略研究 [J], 徐凯;王建平;左梦玲;金力
5.AMT换挡过程的协调控制策略研究 [J], 范珊珊;孙文军;聂幸福
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABSTRACTFor a fuel optimal gear shift control, when look aheadinformation is available, the impact of the automated manualtransmission (AMT) gear-shifting process is analyzed. For astandard discrete heavy truck transmission, answers are foundon when to shift gears, prior to or when in an uphill slope.The gear-shifting process of a standard AMT is modeled inorder to capture the fuel and time aspects of the gear shift. Anumerical optimization is performed by dynamicprogramming, minimizing fuel consumption and time bycontrolling fuel injection and gear. Since a standard AMTdoes not have look ahead information, it sometimes gearsdown unnecessarily and thus gives a significantly higher fuelconsumption compared to the optimal control. However, ifgearing down is inevitable, the AMT gear-shifting strategy,based on engine thresholds, is well-functioning so that theoptimal control only gives marginal additional savings. Toattain the possible fuel reductions it is shown that theoccasion of shifting gear must be chosen to ensure anadequate engine speed in order to get a sufficient enginepower after the gear shift. The reduced propulsion of an AMTgear-shifting process, and the resulting vehicle retardation,must be considered.
INTRODUCTIONIt has been shown that an optimal velocity profile for a heavytruck not only ensures a high utilization of the energy in atopography with significant hills, but also that gear-shifting isless likely to occur, see [1]. However, for long uphill slopeswith large road gradients, gearing down becomes inevitablesince the maximum
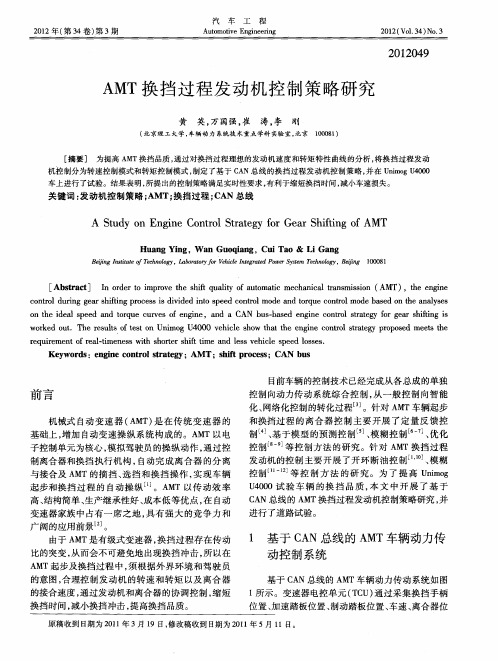
Figure 1. A gear shift from 10th to 8th gear of a 37tonnes truck in a 6.5% uphill gradient.
engine torque on the direct gear is not high enough to managepropelling the vehicle within an acceptable speed range.
Heavy trucks with an automatically controlled manual gearbox, i.e. an automated manual transmission (AMT), arecommon in long haulage and the impact of its gear-shiftingprocess on optimal gear control will be studied. In Figure 1 atypical AMT gear-shifting process is illustrated, in terms ofengine torque and speed. An AMT system does not contain aclutch or torque converter. Instead engaging and disengagingof gears are enabled by engine torque control (as shown inFigure 1), which is performed differently depending ondriving scenario. This leads to a lower propulsive force forone or two seconds, and accordingly, the traction of thevehicle is affected by the AMT gear-shifting process. Thelow propulsive work during a gear shift leads to that vehiclespeed is, for a short period of time, only determined by thedriving resistance. The driving resistance varies with the roadgradient and truck speed, and consequently the truck isaffected differently depending on when the gear shift isexecuted.
Impacts of AMT Gear-Shifting on Fuel OptimalLook Ahead Control2010-01-0370
Published04/12/2010
Maria Ivarsson, Jan Åslund and Lars NielsenLinkoping Univ.
Copyright © 2010 SAE International
Licensed to Hunan UnivLicensed from the SAE Digital Library Copyright 2010 SAE International E-mailing, copying and internet posting are prohibitedDownloaded Monday, November 29, 2010 8:07:45 AM
Author:Gilligan-SID:13628-GUID:40343935-222.247.53.136Due to the characteristics of the AMT gear-shifting process,and the fact that the truck is retarded differently during gearshifts, the occasion of shifting gears does affect comfort,performance and fuel consumption. A fuel optimal gear-shifting strategy that respects final time is many timesrequested, however it is not intuitive to find. The objective isthus to find the fuel optimal gear-shifting strategy. Firstly, thegear-shifting process of a standard AMT is modeled, notconsidering the comfort details, in order to capture the fueland time aspects of the gear shift. Thereafter, a numericaloptimization is performed by dynamic programming,minimizing fuel consumption and time by controlling fuelinjection and gear.
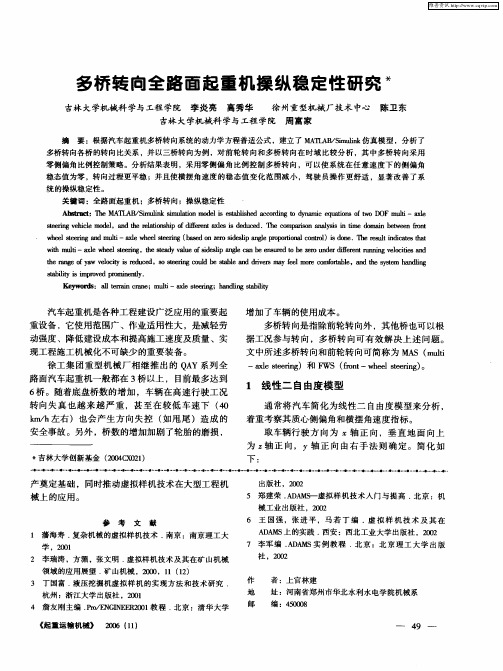
PROBLEM FORMULATIONROAD MODELUphill slopes with significant road gradients are studied inorder to find roads that enforce gear shifts. Swedish highwaysare well documented by [2], and are thereby chosen as theroad model of this paper. Highways are if possibleconstructed to have a road gradient, , less than 6%, whichclassifies the road to a high standard. Road gradients up to8% are allowed as well but the road is then classified as lowstandard. However, for the purpose of studying heavy truckgear-shifting, 6% is an interesting road gradient. In thestudied road profile, shown in Figure 2, the 6% road gradientis kept constant for a road segment long enough to imposegear-shifting (approximately between 1000 and 2000 m).