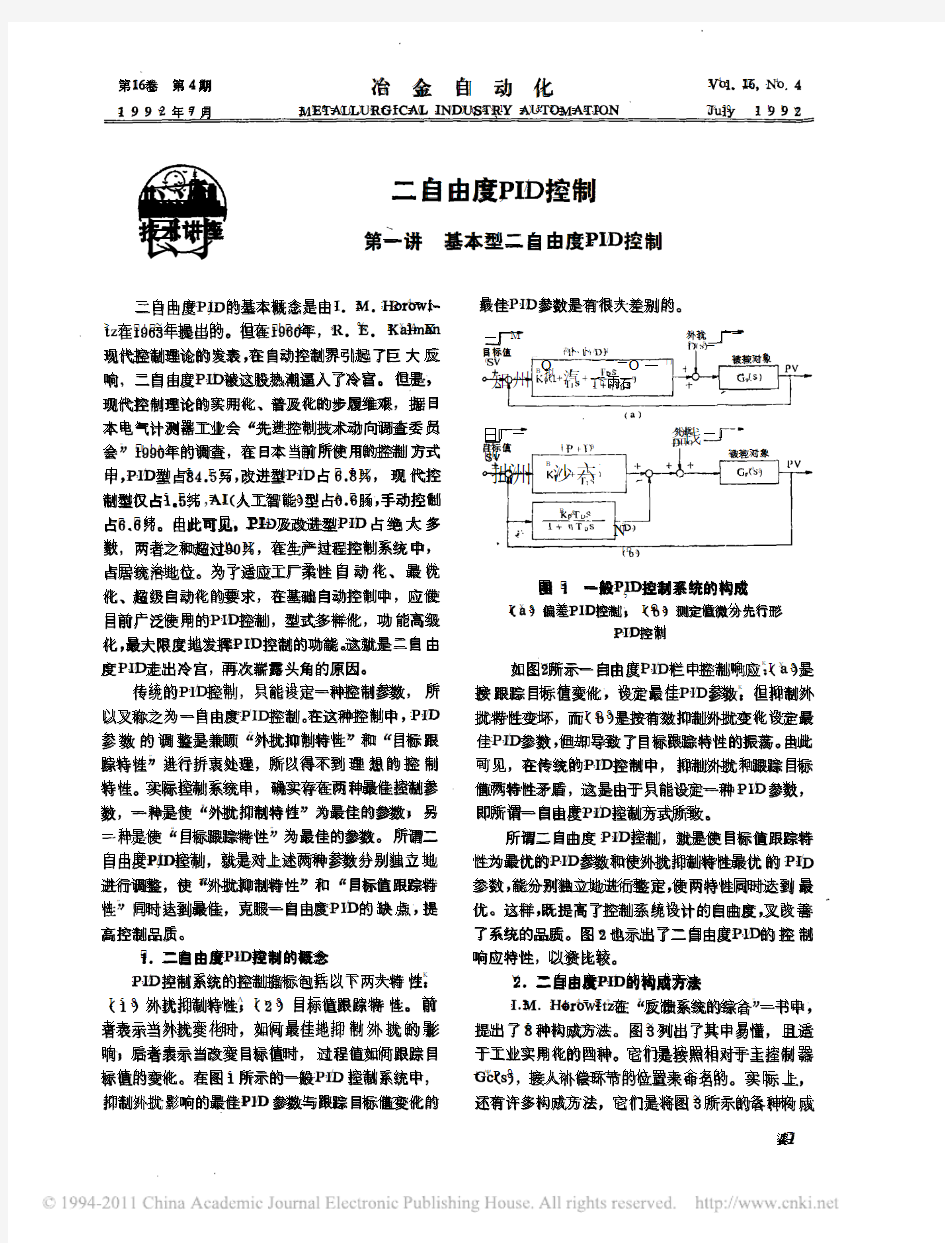
二自由度PID控制_第一讲基本型二自由度PID控制
二自由度简易云台增稳控制系统设计
二自由度简易云台增稳控制系统设计 项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。 项目方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,项目鉴定。 本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本项目要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。完成研究报告一份。 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
PID 通俗解释
PID控制原理 3个故事:看完您就明白了。 1、:PID的故事小明接到这样一个任务:有一个水缸点漏水(而且漏 水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发 现水面高度低于要求位置,就要往水缸里加水。 小明接到任务后就一直守在水缸旁边,时间长就觉得无聊,就跑到房 里看小说了,每30分钟来检查一次水面高度。水漏得太快,每次小明 来检查时,水都快漏完了,离要求的高度相差很远,小明改为每3分 钟来检查一次,结果每次来水都没怎么漏,不需要加水,来得太频繁 做的是无用功。几次试验后,确定每10分钟来检查一次。这个检查时 间就称为采样周期 开始小明用瓢加水,水龙头离水缸有十几米的距离,经常要跑好几趟 才加够水,于是小明又改为用桶加,一加就是一桶,跑的次数少了, 加水的速度也快了,但好几次将缸给加溢出了,不小心弄湿了几次鞋,小明又动脑筋,我不用瓢也不用桶,老子用盆,几次下来,发现刚刚好,不用跑太多次,也不会让水溢出。这个加水工具的大小就称为比 例系数 小明又发现水虽然不会加过量溢出了,有时会高过要求位置比较多, 还是有打湿鞋的危险。他又想了个办法,在水缸上装一个漏斗,每次 加水不直接倒进水缸,而是倒进漏斗让它慢慢加。这样溢出的问题解 决了,但加水的速度又慢了,有时还赶不上漏水的速度。于是他试着 变换不同大小口径的漏斗来控制加水的速度,最后终于找到了满意的 漏斗。漏斗的时间就称为积分时间 小明终于喘了一口,但任务的要求突然严了,水位控制的及时性要求 大大提高,一旦水位过低,必须立即将水加到要求位置,而且不能高 出太多,否则不给工钱。小明又为难了!于是他又开努脑筋,终于让 它想到一个办法,常放一盆备用水在旁边,一发现水位低了,不经过 漏斗就是一盆水下去,这样及时性是保证了,但水位有时会高多了。 他又在要求水面位置上面一点将水凿一孔,再接一根管子到下面的备 用桶里这样多出的水会从上面的孔里漏出来。这个水漏出的快慢就称 为微分时间 看到几个问采样周期的帖子,临时想了这么个故事。微分的比喻一点 牵强,不过能帮助理解就行了,呵呵,入门级的,如能帮助新手理解 下PID,于愿足矣。故事中小明的试验是一步步独立做,但实际加水 工具、漏斗口径、溢水孔的大小同时都会影响加水的速度,水位超调 量的大小,做了后面的实验后,往往还要修改改前面实验的结果。 2、控制模型:人以PID控制的方式用水壶往水杯里倒印有刻度的半杯 水后停下; 设定值:水杯的半杯刻度;
PID控制算法经验之谈
PID控制概述 PID控制是目前工程上应用最广的一种控制方法,它的优点在于结构简单,且不依赖被控对象模型,控制所需的信息量也很少,因而非常易于工程实现,同时通过参数的调整也可获得较好的控制效果。 PID控制是将误差信号的比例(P)、积分(I)和微分通过线性组合构成控制量,故称之为PID控制。因此,在使用中只需要设定三个参数即可。在很多情况,往往不一定需要三个单元,但是比例单元是必不可少的。 PID控制器设计的难点在于参数整定。但是实际上很多情况下我们可以直接根据系统的时域响应来调整比例、微分和积分三个环节的参数,当然这就需要了解这三个环节对时域响应的有什么样的影响。 (1)比例环节:直接将误差信号放大或缩小,因此将比例环节参数增大可以提高响应速度并且减小稳态误差,但是,快速性和稳定性总是一对矛盾,也就是在增大比例系数的同时,系统的稳定性逐渐减低,系统将会出现超调、振荡,甚至发散,因此合适的比例增益是在快速性和稳定性之间进行折中。 (2)积分环节:从积分的定义可知,该环节是将误差不断进行累积,可实现消除稳态误差。增益越大,积分作用越强,稳态误差消除也越快,但是带来的问题是容易产生积分饱和现象,带来大的超调并延缓了系统进入稳态的速度,因此这又是一个矛盾。 (3)微分环节:该环节或取的是误差的微分信息,根据微分的定义,我们可以知道,这是一个超前环节,也就是说该信号提前告诉我们控制量是该减还是该增,避免造成超调、振荡,因此增大该环节增益有助于提高系统的稳定性,避免振荡,但是对快速性却产生了负作用(快速性和稳定性总是一会矛盾体),因此必须合理选取。还有必须注意的是,微分环节对噪声信号将产生放大作用,因此在噪声较大的系统中慎用。 正是由于PID控制参数整定的复杂性,目前出现了多种改进的PID控制方法,我们将在下一篇中对这些改进型进行归纳总结。 各种改进型PID控制总结 随着数字控制技术的发展,我们在控制器的设计上有了更大的灵活性,一些原来在模拟PID控制器中无法实现的问题,现在我们很容易就能在数字计算机上实现了,于是产生来了一系列改进的控制算法,形成非标准的控制算法,改善系统品质,满足不同控制系统的需要。 1.积分分离PID控制算法 PID控制中引入积分环节,主要是为了消除静差,提高控制精度。但在启动、结束或大幅度增减指令时,短时间内系统有很大输出,由于积分积累的作用,致使控制量超过执行机构可能运行的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡,这在生产中是绝对不允许的。积分分离的
双自由度控制器
第一章绪论 在工程和科学技术发展过程中,自动控制担负着重要的角色。除了在宇宙飞船系统、导弹制导系统和机器人系统等领域中,自动控制具有特别重要的作用之外,它已成为现代机器制造业和工业生产过程中的重要而不可缺少的组成部分。例如,在制造工业的数控机床控制中,在航空和航天工业的自动驾驶仪系统设计中,以及在汽车工业的小汽车和大卡车设计中,自动控制都是必不可少的。此外,在工业中的过程控制,对压力、温度、湿度、黏性和流量的控制等工业操作过程,自动控制也是不可缺少的。 自动控制理论和实践的不断发展,为人们提供了获得动态系统最佳性能的方法,提高了生产率,并且使人们从繁重的体力劳动和大量重复性的手工操作中解放出来。 1.2控制系统的分类 1.2.1 反馈控制系统 能对输出量与参考输入量进行比较,并且将它们的偏差作为控制手段,以 保持两者之间预定关系的系统,称为反馈控制系统。室温控制系统就是反馈系统的例子。通过实际室温,并且将其与参考温度(希望的室温)进行比较,温室调机器就会按照某种方式,加温或冷却设备打开或关闭,从而将室温保持在使人们感到舒适的水平上,且与外界条件无关。反馈系统并不限于工程系统,在各种不同的非工程领域,同样存在着反馈控制系统。 1.2.2 闭环控制系统 反馈控制系统通常属于闭环控制系统。在实践中,反馈控制和闭环控制这两个术语通常交换使用。在闭环控制系统中,作为输入信号与反馈信号(反馈信号可以是输出信号本身,也可以是输出信号的函数及其导数和/或其积分)之差的作用误差信号被传送到控制器,以便减小误差,并且使系统的输出达到希望的值。闭环控制这个术语,总是意味着采用反馈控制作用,以减小系统误差。
精心编制的 S7-300 PID 使用说明
定时中断组织块OB35 西门子S7-300/400有9个定时中断组织块:OB30、OB31、OB32、OB33、OB34、OB35、OB36、OB37、OB38 。 CPU可以定时中断去执行这些模块中的程序,即:每隔一段时间就停止当前的程序,转去执行定时中断组织块中的程序,执行结速后再返回。相当于单片机的定时中断。 这9个组织块功能相同,你可以选择其中之一使用,区别是它们的中断优先级不同,如果程序中用到了多个定时中断组织块,应设好它们的执行优先级。 S7-300CPU 可用的定时中断组织模块是OB35,在300站点的硬件组态中,打开CPU 属性设置可以看到其它的中断组织块为灰色。OB35默认的调用时间间隔为100ms 我们可以根据需要更改,定时范围是1-60000毫秒(ms) 设置中断时间间隔如下图所示 注意:设置的时间必须大于OB35中程序执行所花费的时间。 例如:如果中断时间间隔为50ms而OB35中的程序花费的时间是70ms,那么OB35中的程序还没执行完毕就产生第二次中断,程序就会出错,这显然是我们不想看到的结果。 以现在的技术,让你间隔一小时去月球拿一块石头你能做到吗??? 去月球所用的时间大于去月球的时间间隔,你做不到吧??? 正确设置:中断时间间隔大于OB35中程序执行完毕一次所需的时间
使用FB41实现PID控制 在自动化领域中常常要用到PID控制,而常规仪表里一个控制器就只能实现一路的PID 控制,如果要现实多路的PID控制成本就会变得非常高,而且不便于我们集中控制与管理。 经过学习西门子S7-300PLC,我们可以使用模块FB41来实现PID控制,FB41就相当于我们常规仪表里的控制器,既然是PID控制器就应该能够设定P、I、D参数。即:比例度、积分时间、微分时间。常规仪表的面板上可以更改PID参数,又有手动/自动切换按钮等。 今天我们要做的就是使用S7-300PLC 的FB41来代替常规仪表,如何使用FB41来实现PID控制的呢?? FB41是一个功能块,它所能实现的功能(PID)已经由专业人员设计好,我们只要调用它,并根据我们的需要来更改相应的参数即可使用。所以我们不用理会FB41是如何实现比例运算、积分运算、微分运算等等这些问题,只需要会调用就可以了。 现在我们已经知道FB41就相当于常规仪表里的一个控制器了,那么我们是如何使用FB41并给它设置相应的参数呢?? FB41相当于一个子程序,它是用来实现PID运算的,我们只需要每隔一段时间去调用这一“子程序”就可以实现PID控制。所以我们在OB35里调用FB41就可以了,调用的频率可以在属性里面设置。 我们是在OB35里调用FB41的所以在OB35里可以看到FB41的端口。因此可以直接在这些端口上直接设参数。 如下图所示
六自由度机械手复杂运动控制
本文以示教型六自由度串联机械手为试验设备,进行机械手的复杂运动控制,使机械手完成各种复杂轨迹的运动控制等功能,能够在现代工业焊接、喷漆等方面的任务。 本文从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。目前,六自由度机械手的复杂运动控制已经有了比较好的逆解算法,也有一些针对欠自由度机械手的逆解算法。逆解算法求出的解不是唯一的,它能使机械手达到更多位姿,完成大部分的原计划任务,但其中的一些解并不是最优化的,因此必须讨论其反解的存在性和唯一性。 本文通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。 最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。 关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄ABSTRACT
In this paper, mechanical hand control the complex movement based on the series of six degrees of freedom manipulator so that the mechanical hand complete the complex trajectory of the movement control functions. In modern industrial welding, painting, and other aspects of the mandate can be used. This article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. At present, the six degrees of freedom manipulator complex movement has been relatively good control of the inverse algorithm.There are also some less freedom for the inverse of the manipulator algorithm. Solutions sought by inverse algorithm is not the only solution, it can reach more manipulator Pose, originally planned to complete most of the task.But some of these solutions is not the most optimal, it is necessary to discuss their anti-the existence of solutions and uniqueness. Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists. So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended procedures.The eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct. The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming. key words:Six degree-of-freedom manipulators,Cartesian coordinates,Equations of motion,Simulation,Demonstration handle.
PID参数设置参考说明
FB41称为连续控制的PID用于控制连续变化的模拟量,与FB42的差别在于后者是离散型的,用于控制开关量,其他二者的使用方法和许多参数都相同或相似。 PID的初始化可以通过在OB100中调用一次,将参数COM-RST置位,当然也可在别的地方初始化它,关键的是要控制COM-RST; PID的调用可以在OB35中完成,一般设置时间为200MS, 一定要结合帮助文档中的PID框图研究以下的参数,可以起到事半功倍的效果 以下将重要参数用黑体标明.如果你比较懒一点,只需重点关注黑体字的参数就可以了。其他的可以使用默认参数。 A:所有的输入参数: COM_RST:BOOL: 重新启动PID:当该位TURE时:PID执行重启动功能,复位PID内部参数到默认值;通常在系统重启动时执行一个扫描周期,或在PID进入饱和状态需要退出时用这个位; MAN_ON:BOOL:手动值ON;当该位为TURE时,PID功能块直接将MAN的值输出到LMN,这可以在PID框图中看到;也就是说,这个位是PID的手动/自动切换位;(默认为1) PEPER_ON:BOOL:过程变量外围值ON:过程变量即反馈量,此PID可直接使用过程变量PIW(不推荐),也可使用PIW规格化后的值(常用),因此,这个位为FALSE; P_SEL:BOOL:比例选择位:该位ON时,选择P(比例)控制有效;一般选择有效; I_SEL:BOOL:积分选择位;该位ON时,选择I(积分)控制有效;一般选择有效; INT_HOLD BOOL:积分保持,不去设置它; I_ITL_ON BOOL:积分初值有效,I-ITLVAL(积分初值)变量和这个位对应,当此位ON 时,则使用I-ITLVAL变量积分初值。一般当发现PID功能的积分值增长比较慢或系统反应不够时可以考虑使用积分初值; D_SEL :BOOL:微分选择位,该位ON时,选择D(微分)控制有效;一般的控制系统不用; CYCLE :TIME:PID采样周期,一般设为200MS; SP_INT:REAL:PID的给定值; PV_IN :REAL:PID的反馈值(也称过程变量); PV_PER:WORD:未经规格化的反馈值,由PEPER-ON选择有效;(不推荐) MAN :REAL:手动值,由MAN-ON选择有效; GAIN :REAL:比例增益; TI :TIME:积分时间; TD :TIME:微分时间; TM_LAG:TIME:我也不知道,没用过它,和微分有关; DEADB_W:REAL:死区宽度;如果输出在平衡点附近微小幅度振荡,可以考虑用死区来降低灵敏度; LMN_HLM:REAL:PID上极限,一般是100%; LMN_LLM:REAL:PID下极限;一般为0%,如果需要双极性调节,则需设置为-100%;(正负10V输出就是典型的双极性输出,此时需要设置-100%); PV_FAC:REAL:过程变量比例因子 PV_OFF:REAL:过程变量偏置值(OFFSET) LMN_FAC:REAL:PID输出值比例因子; LMN_OFF:REAL:PID输出值偏置值(OFFSET); I_ITLVAL:REAL:PID的积分初值;有I-ITL-ON选择有效;
PID控制的基本原理
盛年不重来,一日难再晨。及时宜自勉,岁月不待人。 PID 控制的基本原理 1.PID 控制概述 当今的自动控制技术绝大部分是基于反馈概念的。反馈理论包括三个基本要素:测量、比较和执行。测量关心的是变量,并与期望值相比较,以此误差来纠正和控制系统的响应。反馈理论及其在自动控制中应用的关键是:做出正确测量与比较后,如何用于系统的纠正与调节。 在过去的几十年里,PID 控制,也就是比例积分微分控制在工业控制中得到了广泛应用。在控制理论和技术飞速发展的今天,在工业过程控制中95%以上的控制回路都具有PID 结构,而且许多高级控制都是以PID 控制为基础的。 PID 控制器由比例单元(P)、积分单元(I)和微分单元(D)组成,它的基本原理比较简单,基本的PID 控制规律可描述为: G(S ) = K P + K1 + K D S (1-1) PID 控制用途广泛,使用灵活,已有系列化控制器产品,使用中只需设定三个参数(K P ,K I和K D )即可。在很多情况下,并不一定需要三个单元,可以取其中的一到两个单元,不过比例控制单元是必不可少的。 PID 控制具有以下优点: (1)原理简单,使用方便,PID 参数K P、K I和K D 可以根据过程动态特性变化,PID 参数就可以重新进行调整与设定。 (2)适应性强,按PID 控制规律进行工作的控制器早已商品化,即使目前最新式的过程控制计算机,其基本控制功能也仍然是PID 控制。PID 应用范围广,虽然很多工业过程是非线性或时变的,但通过适当简化,也可以将其变成基本线性和动态特性不随时间变化的系统,就可以进行PID 控制了。 (3)鲁棒性强,即其控制品质对被控对象特性的变化不太敏感。但不可否认PID 也有其固有的缺点。PID 在控制非线性、时变、偶合及参数和结构不缺点的复杂过程时,效果不是太好; 最主要的是:如果PID 控制器不能控制复杂过程,无论怎么调参数作用都不大。 在科学技术尤其是计算机技术迅速发展的今天,虽然涌现出了许多新的控制方法,但PID 仍因其自身的优点而得到了最广泛的应用,PID 控制规律仍是最普遍的控制规律。PID 控制器是最简单且许多时候最好的控制器。 在过程控制中,PID 控制也是应用最广泛的,一个大型现代化控制系统的控制回路可能达二三百个甚至更多,其中绝大部分都采用PID 控制。由此可见,在过程控制中,PID 控制的重要性是显然的,下面将结合实例讲述PID 控制。 1.1.1 比例(P)控制 比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳定误差。比例控制器的传递函数为: G C (S ) = K P (1- 2) 式中,K P 称为比例系数或增益(视情况可设置为正或负),一些传统的控制器又常用比例带(Proportional Band,PB),来取代比例系数K P ,比例带是比例系数的倒数,比例带也称为比例度。 对于单位反馈系统,0 型系统响应实际阶跃信号R0 1(t)的稳态误差与其开环增益K 近视成反比,即: t→∞
PID白话式理解说明及智能车闭环控制详解
PID白话式理解说明及智能车闭环控制详解 By jiahangsonic 编码器专卖https://www.360docs.net/doc/f612339390.html, 本文只是技术交流,仅仅是鄙人对一些知识的看法和认识,由于鄙人学疏才浅,必然会在本文中出现定义理解不深刻,原理叙述有误等错误,敬请各位高人理解,如有错误之处,请大家指出,我将积极学习改进。 其实很早就应该写这么一个东西,由于学习和工作太忙,一直没有时间去写,春节放假,偶尔有了时间,决心一定要写好,本文只是针对初学者,对于那些老鸟和大神们,基本上没有看的必要,所以再您看这篇文章之前,还要对我多多的理解和宽容,写不好,我改进学习,写的好,希望对您有帮助。 (一) PID的背景和一些原理上理解 PID控制技术,是最简单的闭环控制技术之一,一般都是利用单反馈或者多反馈来实现对控制对象的调节,实现被控对象的可控性和可预知性的控制。使得设备运行的更加的可靠,合理且平稳。 PID的全称为比例积分微分控制,P即为比例,I即为积分,D即为微分。PID往往都是应用于惰性系统,所谓惰性系统就是变化较慢且无法精确控制和调节的对象,其中最最重要的特点就是变化速度慢,调节速度慢,控制周期较长,最经典的控制对象就为温度的温控。 下面就举一个简单的例子进行说明: 比如我们要对一个水箱里面的水进行加热,我们的目标加热温度为100℃,首先我们不用闭环对水温进行加热,也就是说我们只是靠人为观察温度计的温度值来对加热器进行人工的干预。
当温度加热到100℃以后,我们就停止加热,这个时候,虽然水温已经到达100且加热器已经不再通电加热,但是由于加热器的预热和水本身传递温度的惰性,导致水温会继续上升,经过一段时间后,水温会继续升高,并且超过100℃,那么该系统就无法达到我们所预期的要求。 这个时候您谁想,停止加热后本身会继续散热继续升温,那等到温度到90摄氏度左右以后,我们停止加热,然后利用水的惰性和加热器的散热,让水温继续升温,正好达到100℃,这样不就解决问题了吗?这么想是对的,但是水温要达到90几度的时候我们停止加热呢?还有就是从停止加热到100℃的时间是多少?经过一段时间后,温度没有达到100℃,而是小于100摄氏度以后温度就达到了顶峰,这样怎么办? 上述所有的办法,可能能够解决水温到达100℃的要求,但是其中很多环节很多结果都是无法预测和无法控制的,即便经历了很麻烦的人为干预同时经过了一个较长的时间达到了我们对水温加热到100℃的要求,也要经历一个相当复杂和相当漫长的时间才能达到,并且整个过程一直要有人为的干预,实在是属于劳民伤财。 不只是对温度的控制,还有其他很多领域的过程控制,都遇到了这些让人很困惑问题,所以科学家就针对此类问题发明了闭环控制原理,其中最经典最简单最实用的就是PID闭环控制。该控制原理简单可靠,参数调整简便,实用性强,广泛的受到人们的支持。 利用PID控制原理对水温进行加热控制,我现在进行举例说明:目标温度
自我简述PID调节的方法
PID调节口诀 1. PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1, 2. 一看二调多分析,调节质量不会低2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照: 温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s, 液位L: P=20~80%,T=60~300s, 流量L: P=40~100%,T=6~60s。 3.PID控制的原理和特点 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。 比例(P)控制比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 微分(D)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
并联六自由度运动平台
并联六自由度运动平台 1.概述 并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。 图0-1:六自由度及其坐标系定义图 我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。 六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。 2.系统组成 2.1液压伺服类 典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。 液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。 控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。 控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。 2.2 电动伺服类 电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增 加运动控制单元。具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。 3.主要技术参数 以下参数为液压类平台典型值,具体可按用户要求设计制造。 3.1平台主要参数 平台最大负载:静态≥2000KG,动态≥3000KG。 上平台球铰分布园直径1400mm,相邻球心距离157mm; 下平台球铰分布园直径1600mm,相邻球心距离167mm; 伺服缸最小球铰球心距离800mm,最大长度1200mm;(采用Φ63/45~400缸体)。 平台初始高度约700mm。 3.2 泵站技术指标 额定流量:90L/min 最大系统压力:12Mpa; 泵站电机功率:22KW; 空间尺寸:1400×1200×1320 3.3 运动参数 伺服缸运动速度≥200mm/S;有效行程≥400mm。 主要运动参数如下表:
云台两自由度控制
云台两自由度控制 作者:04——715班王天指导老师:李 云台是搭载激光测距仪座,摄像头座,机械手座之物,为这些仪器部件提供更大的适用范围。 此品主要采用蜗轮蜗杆的结构来作为传动机构。 其优点是可以得到很大的传动比,比交错轴斜齿轮机构紧凑,因为线接触,故承载能力比交错轴斜齿轮大得多,另外传动平稳无噪音,这样仿生蛇可以执行更隐蔽的任务。还有蜗杆的到程角r小于轮齿间的当量摩擦角时,机构具有自锁性,即只能由蜗杆带动蜗轮,而不能有蜗轮带动蜗杆,这样便于抬板稳定在某一位置工作。而蜗轮蜗杆将纵向转动变为侧向转动方可以使我们的布局更合理。 当然蜗轮蜗杆机构也具有一定的缺点,(1)齿合时相对滑动速度v较大,以磨损,以发热股效率低,而对于具有自锁性的蜗杆传动其效率更低。(2)为了散热和减小摩擦,常需贵重的抗磨材料和良好的润滑装置,故成本较高(3)蜗杆的轴向力较大。看起来去点多多,但在我们的设备本身的运作状况下这些也便不再是缺点了。首相我们的设备转速要求不大,阻力也不大,并不要求时刻保持运作,因此以磨损,易发热,效率较低情况便可忽略。也因如此便不用采用贵重的材料了,所以成本的问题也便不再成为问题。因为阻力不大,轴向力大的问题也便不是问题了。 我们用的电机是瑞士产的ZGR17AL支流减速电机。每分钟转速15转。正好可以迎合我们的设备不需要告诉运作的要求,而起匀速,慢速转动的特性,可以很好的进行控制,在开环控制的情况下获得较大的精度。 控制用数字化控制,利用双极坐标控制,(X,Y).X为底盘转角。Y为台办的转角。X介于0度到360度之间,Y介于0度到90度之间。我们并没有安装测算转过角度的设备,我们通过测算电机转动时间来推算转过的角度,此过程在我们要求转动精度不高的情况下是一种很实用经济有效的手法。我们的转盘上安装一个触碰开关,这样在每次反应前,反转,当碰及触碰开关时停止,以此作为基准。这个既为校准的过程,此位置作为0度。在开始转动命令要求的角度。如此,可以是误差不累加化,提高了工作精度! 我们的电子系统主要是利用plcc封装的51单片机来进行控制,其优点在于功能全面执行能力强,开发工具完善,衍生产品丰富,大量的设计资源可以继承和共享。此单片机成本较低,可以反复擦写1000次左右,可以在没有仿真器的情况下进行反复测试。有效的降低了成本,而plcc封装是正方形而且体积小重量轻,安装于抬板上,云台上,其重心较为稳定,可避免在蛇身高速运动,灵活转向时出现不必要的问题。而运抬要升高到很高高度时,其承载能力较差,所以减轻重量是必要之举。而且使用此单片机可是总体电路紧凑,简明,便于制作和日后维修。 工作原理简述:从并口输入坐标值(X,Y).经过程序中的一套算法,其中包括蜗轮蜗杆的传动比,电机转速,时钟,底座(齿轮)半径,始终,最后转化为电机开启时间,使设备转到预定位置。
PID使用说明
PID调节器又称回路调节器,本调节器提供的具体功能有:手动、自动、串级、及跟踪运行方式的切换,设定值、手动输出值的调整,PID参数的整定等。 PID调节有三种画面:回路操作画面、趋势显示画面和参数调整画面。下面介绍每种画面显示的信息及用途。 1.回路操作画面 在预先设置的PID热点上,单击鼠标左键,屏幕上将弹出如图3.11-1所示回路操作画面,由回路操作画面可分别进入其它两种画面。 (1)显示信息说明 在回路调节画面中显示的有设定值、过程值和输出值的棒图及数值显示,运行方式显示,报警状态显示等。 ?棒图显示 画面左边的三个棒图分别代表设定值、过程值和输出值,棒的颜色依次为蓝、天蓝、粉色。 设定值棒的高度为当前值相对量程的百分数。如果PID运行于串级状态,则设定棒显示串级外给定值,在其它运行状态下显示内给定值。 过程值棒的高度表示过程输入值。 输出棒的高度表示输出值。 ?数值显示 画面右下区域的三个方框中显示的内容依次为设定量、过程量及输出量的当前值,各数值颜色与棒颜色相对应。 当PID调节器运行于手动、自动或跟踪状态时,设定值为内部给定值;当运行于串级状态时,显示为串级输入值。 当PID调节器运行于手动状态时,输出值由手动给出;运行于自动和串级状态时,由算法结果给出;运行于跟踪状态时,为跟踪量点值。 ?报警状态显示 当偏差报警到来时,左上角灯置亮(呈红色);报警消失时,恢复正常颜色。 ?运行方式显示 PID调节器的运行方式包括手动、自动、串级及跟踪四种,当某个运行方式下的状态灯呈绿色时,表示调节器处于某方式。 ?其它 PID调节器画面静态显示的内容有点名、点描述(说明)等。
6自由度控制算法
由于六自由度位置姿态调整平台动力学特性和串联机器人是相通的,所以可以借鉴。增强型PD控制器,这种控制器是在一个线性PD控制的基础上加上沿期望轨迹计算的名义动力学前馈部分以及一个非线性补偿部分,它的最大优点是可以根据规划好的期望轨迹离线计算前馈补偿部分,从而降低实时计算的计算量。计算力矩控制方法,它通过计算力矩的方式控制非线性系统沿期望轨迹运动,如果机器人动力学模型是准确的,计算力矩控制器可以实现动态解耦,并得到一个指数稳定的闭环动力方程,从而实现跟踪误差的指数收敛。 在并联机器人的控制策略中,除了常用的PID控制之外,还有自适应控制,滑模变结构控制,鲁棒控制以及智能控制等控制方法。 基于滑模控制的方法 在具有不确定性的系统的研究和应用中,滑模控制一直是一个非常有效的控制方法。滑模控制也叫变结构控制,其本质是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”不是一成不变的,而是可根据系统当前的状态有目的地不断变化。对于具有信号传输时延的交互控制遥操作系统,也可以应用滑模控制来实现。只要知道时延大小,滑模控制就可以实现变时延情况下的遥操作系统的稳定控制。由于滑动模态与系统对象参数及扰动无关,因此滑模控制具有响应快、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。 鲁棒控制 由于遥操作系统中操作对象的不确定性,以及操作任务的实时变化,导致遥操作系统的特性和参数随工作状态和工作环境的变化而变化,这样就无法得到精确的描述遥操作系统特性的数学模型,给控制系统的设计带来困难。鲁棒控制设计的目标就是在模型不精确和存在其他变化因素的条件下,使系统仍能保持预期的性能。因此鲁棒控制在遥操作系统中发挥了巨大作用,它较大程度地消除了主观上认识的模型和真实的被控对象之间的误差和不确定性。 基于干扰观测器(DOB)的鲁棒运动控制方法由Ohnishi提出,目前广泛应用于各类电动高精度机械伺服系统"干扰观测器设计基于被控对象的开环数学模型,其基本思想是将外部力矩干扰及模型参数变化造成的实际对象与名义模型输出的差异,统统等效到控制输入端,即观测出等效干扰,在控制中引入等量的补偿,实现对各种干扰的完全抑制,同时还可以减弱非线性环节对伺服系统性能的影响,具有很强的鲁棒性。 六自由度并联平台运动控制器的设计可以分为基于铰接空间控制和基于工作空间控制两大类。 基于铰接空间的控制器设计主要依靠平台机构的运动学关系和驱动装置的动态模型,而不考虑六自由度平台的动力学模型,它假设六个液压缸是独立、无耦合的关系,对每个液压伺服系统分别设计控制器而不用考虑其它关节的影响,这就使得并联平台的控制器设计任务转化为一系列单轴伺服系统的控制器设计。 基于工作空间的控制器设计则需要进行平台动力学分析,建立整个并联平台系统的动力学模型,在给定了平台期望的运动轨迹后,求出按照期望轨迹运动所需的力或力矩,然后控制各个液压伺服系统的驱动装置输出所求出的力或力矩,从而使平台按照期望轨迹运动。 常规PID控制 常规PID目前是最常用的工业控制方法,PID控制器各校正环节的作用
二自由度机器人的位置控制
实验二自由度机器人的位置控制 一、实验目的 1. 运用Matlab语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模 型、动力学模型, 2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控 制,并达到较好控制效果。 二、工具软件 1.Matlab软件 2.Simulink动态仿真环境 3.robot工具箱 模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持Simulink的功能,因此,可以根据需要建立流程图,这样就可以使仿真比较明了。 把robot 工具箱拷贝到MATLAB/toolbox文件夹后,打开matalb软件,点击file--set path,在打开的对话框中选add with subfolders,选中添加MATLAB/toolbox/robot,保存。这是在matlab命令窗口键入roblocks就会弹出robot 工具箱中的模块(如下图)。
三、实验原理 在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就要创建二自由度机器人对象, 二自由度机器人坐标配置 仿真参数如下表1: 表1 二连杆参数配置
1.运动学模型构建二连杆的运动学模型,搭建twolink模型在MATLAB命令窗口下用函数drivebot(WJB)即可观察到该二连杆的动态位姿图。 %文件名命名为自己名字的首字母_twolink %构造连杆一 L{1}=link([0 0.45 0 0 0],'standard') ; L{1}.m=23.9 ;
S7-300PID控制说明
S7-300的PID控制的方法 1、这是一个典型的PID控制系统。 通过模拟量4--20mA的传感器来监视水池的液位,对应PLC的0-27648的工程值,经这个比例转换成水池的液位。对应的液位是你液位传感器对应的最高量程。这个值就是PID的反馈值。 阀门调节由量模拟量输出控制阀门调节开度,控制你水池的液位。 2、无法与实际水位对应(读的参数不知道表示什么意思)? 在PID调节中有不同的物理量,因此在参数设定中需将其规格化。参数规格化: 1.规格化概念及方法:PID参数中重要的几个变量,给定值, 反馈值和输出值都是用0.0~1.0之间的实数表示,因此,需要将模拟输入转换为0.0~1.0的数据,或将0.0~1.0的数据转换为模拟输出,这个过程称为规格化。规格化的方法:(即变量相对所占整个值域范围内的百分比对应与27648数字量范围内的量)。对于输入和反馈,执行:变量*100/27648,然后将结果传送到PV-IN和SP-INT,对于输出变量,执行:LMN*27648/100,然后将结果取整传送给PQW即可; 2.例: 输入参数: SP_INT(给定值):0--100%的实数。 假定模块的输入变量量程为0-10Mpa,则SP_IN的范围0.0-1.00
对应0-10米.可以根据这一比例关系来设置给定值。例:如给定5.0米 SP_INT(给定值)=5.0/(10.0-0.0)*100.0=50.0(50%) PV_IN(过程值,即反馈值):0--100%的实数。 此值来自与阀门阀位(开度)的相应的压力反馈值。其范围0.0-1.0对应0-100%.即,当模拟量模板输入为数值为27648时则对应100%(量程的上限),数值为0时则对应0%(量程的下限)。 可以根据这一比例关系来换算PV_IN值。例:如输入数值为12000时 PV_IN(过程值,即反馈值)=12000/27648*100.0=43.403(43.403%) 输出参数: 当通过PID控制器(FB41)运算后,即得出调节值LMN_PER,该值已转化范围为0-27648的整型数值。例如经运算为43.403%, LMN_PER=43.403*27648/100,取整后为12000,将LMN_PER 送入模拟量输出模板即可. 3、积分时间不知道该如何设定? (1)对于比例控制来说,将比例度调到比较大的位置,逐步减小以得到满意的曲线。 (2)对于比例积分来说,先将积分时间无限大,按纯比例作用