DPG500型铺轨机旋转喂枕机构虚拟样机动态仿真分析
TDS500列车轮对驱动状态仿真试验台
TDS-500列车轮对驱动状态仿真试验台
TeachingEquipment
1)试验台功能介绍
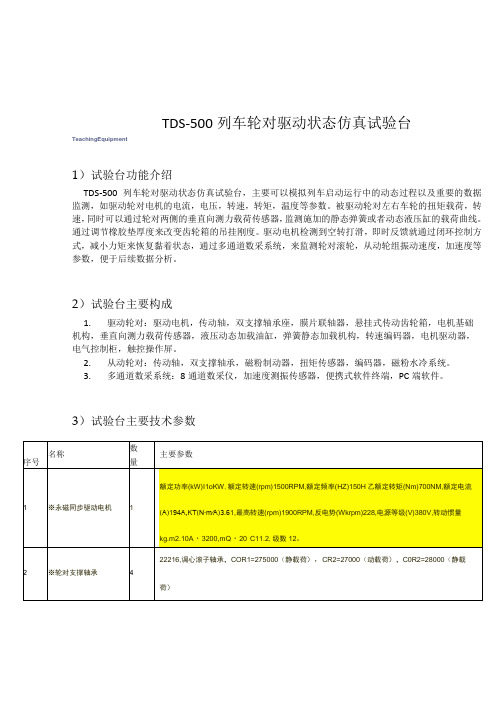
TDS-500列车轮对驱动状态仿真试验台,主要可以模拟列车启动运行中的动态过程以及重要的数据监测,如驱动轮对电机的电流,电压,转速,转矩,温度等参数。
被驱动轮对左右车轮的扭矩载荷,转速,同时可以通过轮对两侧的垂直向测力载荷传感器,监测施加的静态弹簧或者动态液压缸的载荷曲线。
通过调节橡胶垫厚度来改变齿轮箱的吊挂刚度。
驱动电机检测到空转打滑,即时反馈就通过闭环控制方式,减小力矩来恢复黏着状态,通过多通道数采系统,来监测轮对滚轮,从动轮组振动速度,加速度等参数,便于后续数据分析。
2)试验台主要构成
1.驱动轮对:驱动电机,传动轴,双支撑轴承座,膜片联轴器,悬挂式传动齿轮箱,电机基础
机构,垂直向测力载荷传感器,液压动态加载油缸,弹簧静态加载机构,转速编码器,电机驱动器,
电气控制柜,触控操作屏。
2.从动轮对:传动轴,双支撑轴承,磁粉制动器,扭矩传感器,编码器,磁粉水冷系统。
3.多通道数采系统:8通道数采仪,加速度测振传感器,便携式软件终端,PC端软件。
3)试验台主要技术参数。
基于虚拟样机技术的双横臂前悬架系统仿真分析

S mul to a l i fdo bl —wih ne f o us nso i a i n nayss o u e . s bo r nts pe i n ba e on v r u lpr t t pi g s d it a o o y n
L oWe- ig Wa g Jn C e n h a Jn io j g u ipn , n u , h nMa - u , a gX a -i n
l t n a ay i sp r r d a o n l ssi e o me .An i v s iain i d n o h u p n in s kn p n a i n h e r n ain a e wh e s i f n e t t s o e fr te s s so i g i xs a d w e l o e tt s t e li g o e i o h mo i g h n l e c ft e s s n i n p st n lp rmee s o e h n l g sa i t sa ay e .An e e t e me h d vn .T e i f n e o u p so o i o a a a tr n t a d i t bl y i n lz d u h e i h n i f c v to a i d n e p r n e f r8 p e t n o e vr a rt tp n c n lg h e p o u te p oa in i p x e e c o p l ai ft it l o o i g t h oo y t t e n w r d c x lr t s m ̄d d i i o h u p y e o o e. Ke r s o b e w s b n r n u p n in;ADAMS CAR;s l t n;h n l g sa i t y wo d :d u l - h o e fo ts s i e s o / i ai mu o a di t l n b i y
数控机床回转工作台动态性能分析与仿真_顾华锋
usq
= Rs isq
+
dΦ d t rq
-
ωΦ e
·2 17 ·
转刚度 ; k为等效扭转刚度系数 ; m、BL 分别为数控 回转工作台旋转部分质量 、粘性阻尼系数 。
设作用在齿轮 2上的转矩为 T2 ( t) , 作用在蜗轮
4上的转矩为 T3 ( t) 。经过简化可列方程为 [3 ] :
k
θ M
( t)
-
Z2 ·Z4 Z1 Z3
θ L
(
t)
= J1
国内关于数控回转工作台动态特性研究的较少 , 文献 [ 1 - 2 ] 在直流伺服电机通过一级齿轮传动以 及滚珠丝杠驱动工作台作直线运动的建模方面做了研 究 , 而对于交流伺服电机通过一级减速齿轮以及蜗轮 蜗杆副驱动数控回转工作台作回转运动的研究更少 。 本文作者通过建立交流伺服电机 、蜗轮蜗杆副以及回 转工作台的综合机电模型 , 采用数值分析方法 , 对数 控回转工作台传动系统的动态性能参数 (稳定性 、 间隙等 ) 进行了研究 , 初步探讨了影响回转工作台 传动精度及稳定性的主要因素 。 1 数控回转工作台传动系统数学模型
Z1、 Z2 分别为齿轮 1、2 的齿数 ; Z3 为蜗杆 3 的头
数 ; Z4 为蜗轮 4 的齿数 ; J1 为轴 Ⅰ部件和电动机转
子构成的转动惯量 ; J2、J3 分别为轴 Ⅱ、轴 Ⅲ部件的
转动惯量 ; K1、 K2、 K3 分别为轴 Ⅰ、轴 Ⅱ、轴 Ⅲ扭
柔性杆件系统虚拟样机设计及其动力学仿真分析

柔性杆件系统虚拟样机设计及其动力学仿真分析
肖国伟;李光
【期刊名称】《湖南工业大学学报》
【年(卷),期】2009(023)004
【摘要】针对杆件设计轻型化和杆件运动高速化发展,杆件系统中轻质杆件的柔性显著增加,在ADAMS环境中设计柔性杆件系统虚拟样机,并进行其动力学仿真分析.算例结果表明,杆件柔性对系统运动精度和寿命产生了重要影响,在杆件系统设计时应予以考虑这种影响,提高设计精度.
【总页数】3页(P62-64)
【作者】肖国伟;李光
【作者单位】湖南工业大学,机械工程学院,湖南,株洲,412008;湖南工业大学,机械工程学院,湖南,株洲,412008
【正文语种】中文
【中图分类】TP391
【相关文献】
1.含铰接间隙与杆件柔性的空间伸展机构单元的动力学建模与计算模拟第一部分:动力学建模 [J], 陈滨;潘寒萌
2.含铰接间隙与杆件柔性的空间伸展机构单元的动力学建模与计算模拟第二部分:系统动态特性的计算模拟结果 [J], 陈滨;潘寒萌
3.基于杆件柔性的舱门机构动力学特性影响分析 [J], 秦增;万方义
4.柔性传动系统动力学建模及参数整定仿真分析 [J], 李学伟;孔令毅;盖洪东;程祥
5.新型轮椅爬梯机构的柔性动力学仿真分析及优化设计 [J], 朱花;杨辉
因版权原因,仅展示原文概要,查看原文内容请购买。
论文空间传动机构运动仿真及关键件运动特性分析

毕业设计(论文)题 目 空间传动机构运动仿真及关键件运动特性分析 Movement simulation and Movement characteristics analysis of Spatial linkage姓 名 龚 樱学 号 3043119121专业班级 04机制4班指导教师 童森林(高级工程师)分 院 机电与能源工程分院完成日期 2008年 6月10日 宁波理工学院中文摘要在传统的二维设计模式下,零件不是以实体模型进行设计的,因此无法在计算机中对机构进行虚拟装配和运动仿真。
Pro/E是功能强大的软件,在Pro/E环境下,通过对空间传动机构的总体设计,实现相关零件的制作、装配和运动仿真,使机构运动形象生动。
建立了空间传动机构的分析模型,确定了空间机构连杆上沿任一直线作匀速运动的动点轨迹矢量方程.即动点轨迹方程,并进一步地对方程进行微分求出动点在任一瞬时时刻的速度和加速度。
关键词:Pro/E;空间传动机构;运动仿真;运动分析AbstractIn the traditional 2D design mode,parts are not designed as solid models,therefore the virtual assembly and motion simulation for machinery products are impossible.Pro/E is a powerful tool,The Spatial linkage was designed in general under the Pro/E environment,the related parts,assembling and movement of the linkage were succeeded to the simulate.The analytic model is established for spatial linkage mechanisms.T he track’s vector equation of one moving point is found out in any beeline on the link of the spatial mechanism,and the equation is done differential to figure out the instantaneous velocity and acceleration of the point.Keyword:Pro/E;spatial linkage mechanisms;movement simulation;movement analysis毕业设计(论文)任务书一、毕业设计(论文)题目空间传动机构的运动仿真和关键件的运动特性分析二、学生姓名龚樱学号3043119121专业班级04机制(4)班任务书发放日期2007年11月13日三、指导教师对毕业设计(论文)的进度安排及任务要求i.主要任务与目标a了解三维动态仿真设计技术应用现状及存在的问题;b了解三维动态仿真设计技术的发展趋势;c 掌握机构自由度的计算方法、机构的组成原理、结构分析方法、机构关键点速度与加速度及运动线图的求解方法等。
基于虚拟样机的机车齿轮传动系统建模与故障仿真分析

基于虚拟样机的机车齿轮传动系统建模与故障仿真分析
李翠省;廖英英;刘永强
【期刊名称】《石家庄铁道大学学报(自然科学版)》
【年(卷),期】2017(030)002
【摘要】以DF4B型机车齿轮传动系统断齿故障为研究对象,利用三维实体建模软件Solid-Works精确建立正常齿轮传动系统及3种不同程度轮齿断裂模型.将模型导入ADAMS中添加约束和驱动,建立多体动力学模型,进而对断齿故障模型的振动影响进行仿真分析,测量齿轮箱振动信号.利用Matlab进行时域、频域分析,将不同故障程度齿轮分析结果与正常模型结果进行对比,得到了齿轮箱断齿故障发生与否及不同程度下的故障特点.
【总页数】5页(P53-56,62)
【作者】李翠省;廖英英;刘永强
【作者单位】石家庄铁道大学机械工程学院,河北石家庄050043;石家庄铁道大学土木工程学院,河北石家庄050043;石家庄铁道大学机械工程学院,河北石家庄050043
【正文语种】中文
【中图分类】TH113;TH132.4
【相关文献】
1.基于刚-柔耦合模型的高速机车齿轮传动系统断齿故障仿真分析 [J], 王贞云;刘永强;廖英英;石鹏飞
2.基于SolidWorks的高速机车走行部齿轮传动系统的建模 [J], 刘海娥;李春亚
3.基于虚拟样机的机车齿轮传动系统建模与故障仿真分析 [J], 李翠省廖英英刘永强;
4.基于刚-柔耦合模型的高速机车齿轮传动系统断齿故障仿真分析 [J], 王贞云;刘永强;廖英英;石鹏飞
5.基于虚拟样机技术的行星齿轮传动系统仿真分析 [J], 秦涛;孟凡净;刘德政
因版权原因,仅展示原文概要,查看原文内容请购买。
泵车臂架虚拟样机仿真与压损优化

泵车臂架虚拟样机仿真与压损优化
王琛;丁海港;石峰;赵延斌;王福鑫;庞智珍
【期刊名称】《机床与液压》
【年(卷),期】2024(52)3
【摘要】臂架液压系统是混凝土泵车的重要组成部分,用于输送混凝土和布料,目前存在压损过大的问题。
借助AMESim与Simcenter 3D Montion软件建立62 m
泵车臂架虚拟样机模型,经实验验证该虚拟样机与实际系统具有90%以上的契合度。
利用臂架虚拟样机研究系统的动态特性,揭示系统的压力分布,分析系统压损过高的
原因,可知主要压力损失集中在平衡阀与长液压管路,提出3种降低压损的方案。
以臂架管路通径优化为例,进行仿真分析与优化,并通过实验验证了管路通径优化效果。
由仿真和实验结果可知:五臂倒钩收回工况下,将臂架长管路通径由8 mm增大至
10 mm,可使小腔侧管路压力损失降低50%,大腔侧管路压力损失降低60%,可有效降低系统压力。
【总页数】6页(P143-148)
【作者】王琛;丁海港;石峰;赵延斌;王福鑫;庞智珍
【作者单位】中国矿业大学机电工程学院;江苏省矿山智能采掘装备协同创新中心(省部共建);徐州徐工施维英机械有限公司
【正文语种】中文
【中图分类】TH137
【相关文献】
1.基于虚拟样机技术的混凝土泵车臂架疲劳仿真分析
2.混凝土泵车臂架系统优化及仿真
3.基于虚拟样机技术的混凝土泵车臂架的伸展油缸仿真研究
4.基于虚拟样机技术的混凝土泵车臂架的仿真研究
5.基于ADAMS/VIEW的混凝土泵车臂架变幅机构的仿真及优化设计
因版权原因,仅展示原文概要,查看原文内容请购买。
带式烧结机论文:基于虚拟样机技术的带式烧结机动力学仿真

带式烧结机论文:基于虚拟样机技术的带式烧结机动力学仿真【中文摘要】随着钢铁产量的不断增大,作为高炉原料主要供应设备的带式烧结机的作用显得日益重要。
长期以来,带式烧结机的设计方法多采用静态设计为主,缺乏有效的动态仿真设计新方法。
而在带式烧结机研制过程中引入虚拟样机技术,可以实现计算机对带式烧结机各机构在各种工况下作业的仿真模拟,为带式烧结机的创新设计和优化设计提供先进的技术支持。
首先,本课题通过分析带式烧结机尾部星轮和上、下台车列的力学关系,建立了下台车列不起拱的力学模型,提出了对尾部星轮主轴加载转矩作为解决下台车列起拱和速度波动的力控制方法。
根据台车列辊轮轮距的交替变化,提出了基于变齿距偶数齿星轮解决下台车列起拱和速度波动的齿形法。
将齿轮-销齿条传动啮合原理与星轮和辊轮啮合的具体工况相结合,应用反转法结合包络曲线法求解出带式烧结机变齿距偶数齿星轮齿廓曲线方程。
其次,利用三维建模软件Pro/Engineer建立了带式烧结机主要部件(轨道、星轮、台车)的零件模型和装配模型,采用“无缝连接”技术,利用ADAMS和Pro/Engineer的专用接口Mechanism/Pro模块,将Pro/Engineer建好的三维模型直接导入到ADAMS界面下,在ADAMS中编制Macro语句对模型添加复杂约束、工作载荷及摩擦力等,编制Macro语句添加复杂约束,建立动力学模型,仿真实际运动情况。
最后,在对300m2带式烧结机动力学仿真的基础上,得到了尾部星轮转矩、尾部星轮对下台车列推力、台车前后轮y方向位移差等数值随时间变化的曲线,同时得到烧结机传动视频,从数值和可视化角度证明了消除下台车列起拱和速度波动的力学模型正确、力控制方法和齿形法有效。
并初步确定了进行力控制的力矩值,为设计300m2无起拱带式烧结机的力控制装置提供了基本数据。
【英文摘要】With the increasing yield of steel and iron, the sintering machine supplying raw materials for the blast furnace is becoming more important. For a long time, the design method of the sintering machine adopts the static design and has no valid method of dynamic emulation. If the technique of virtual Prototype is introduced in study of the sintering machine, it can realize emulation the running state of each mechanism under various working conditions. Results from the emulation are used to estimate and judge different data of actual movement. What have mentioned above provides technique support for the creative design and optimization of the sintering machine, and plays an important role in expediting the development cycle and reducing the cost.Fristly, by analyzing the mechanics relation between the back sprocket wheel and the upper and lower pallet cars, the non-arching mechanics model of the lower pallet cars is established. The force control methods of imposing the torque-loading on the main shaft of the back sprocket wheel is brought forward tocarry out the non-arching and the speed fluctuations of the lower pallet cars. Two kinds of teeth space arranged alternately and the even number of teeth are determined for the sprocket wheel according to the interval changed wheelbases of the rolling wheels in the pallet cars. By combining the meshing principle with the actual working condition between the sprocket wheel and the pallet cars, with inversion method and envelope curve method the practical tooth profile curve with sectionalized is established and expressed by universal equation.Secondly, based on the sintering machine design criteria and the analysis demand, Pro/E is used to establish a sintering machine 3D model. Using special connection Mechanism/Pro between Pro/E and ADAM, Pro/E 3D model has been transferred directly into ADAMS to avoid data loss by the “seamless link”technology. Real movement has been imitated after adding complicated constraints, load and stly, by the multi rigid body dynamic simulation for the new type 300m2 sintering machine, the time depended curves of the torque acted on the main shaft of the back sprocket wheel, the thrust forces brought bear from the back sprocket wheel to upper and lower pallet cars and the displacement difference between foreside and rearward wheels of pallet are gained. From thevideo of the sintering machine movement, the simulation also proves that the mechanics model is correct, and that the force control method and the profile method are effective to eliminate the arching and the speed fluctuations of the lower pallet cars. Meanwhile, basic data used to design new-type 300m2 non-arching sintering machine are obtained on the basis of a set of force control values.【关键词】带式烧结机起拱力控制方法齿形法虚拟样机仿真分析【备注】索购全文在线加好友:1.3.9.9.3.8848同时提供论文写作一对一指导和论文发表委托服务【英文关键词】Sintering machine Arching the force control method the profile method Virtual Prototype Simulation【目录】基于虚拟样机技术的带式烧结机动力学仿真摘要5-6Abstract6-7目录8-11第1章绪论11-231.1 带式烧结机概述11-131.1.1 烧结在钢铁生产中的作用11-121.1.2 带式烧结机结构和工作过程12-131.2 带式烧结机存在的主要问题及研究概况13-171.2.1 系统漏风问题13-141.2.2 台车速度波动和下台车列起拱问题14-161.2.3 台车速度波动和下台车列起拱的研究进展16-171.3 虚拟样机技术理论基础17-211.3.1 虚拟样机技术概念及其核心理论17-181.3.2 虚拟样机技术的相关技术及常用软件18-201.3.3 虚拟样机(ADAMS)开发过程20-211.4 课题内容和研究意义21-231.4.1 课题的内容和技术路线21-221.4.2 课题的研究意义22-23第2章台车起拱和速度波动的力学分析23-372.1 台车起拱力学分析23-272.1.1 尾部星轮转矩23-242.1.2 尾部星轮和台车的力学关系24-252.1.3 起拱的力学原因25-272.2 台车速度波动分析27-292.2.1 台车结构形式27-282.2.2 速度波动原因28-292.3 台车起拱和速度波动解决方法29-322.3.1 偶数齿烧结机特点29-302.3.2 变齿距偶数齿烧结机星轮30-312.3.3 转矩加载装置31-322.4 控制起拱的力学模型32-372.4.1 力学模型322.4.2 力控制方法32-332.4.3 计算实例300m~2烧结机33-37第3章变齿距偶数齿带式烧结机设计37-493.1 变齿距偶数齿带式烧结机的基本参数37-403.1.1 台车技术参数37-383.1.2 台车运行速度38-393.1.3 台车数量393.1.4 烧结机中心距39-403.2 变齿距偶数齿烧结机星轮设计40-463.2.1 齿距、齿数和节圆半径的确定40-413.2.2 台车追赶时间和加速度的确定41-423.2.3 变齿距偶数齿烧结机星轮齿形设计42-463.3 弯道设计46-49第4章带式烧结机虚拟样机建模及仿真49-734.1 带式烧结机虚拟样机建模49-564.1.1 带式烧结机虚拟样机模型简化49-514.1.2 Pro/E建模及模型传递51-544.1.3 施加约束和模型检验54-564.2 利用宏施加接触力56-604.2.1 宏概述564.2.2 IMPACT型接触力接触参数意义56-584.2.3 利用宏施加接触力的步骤58-604.3 带式烧结机动力学仿真分析60-734.3.1 关键参数的设置与参考坐标系60-614.3.2 烧结机运动原理仿真61-624.3.3 尾部星轮转矩仿真分析62-634.3.4 定齿距星轮未施加转矩仿真分析63-684.3.5 定齿距星轮施加转矩仿真分析68-714.3.6 变齿距星轮施加转矩仿真分析71-73第5章结论与展望73-755.1 结论73-745.2 展望74-75参考文献75-79致谢79。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷第2期2005年6月华 北 水 利 水 电 学 院 学 报JournalofNorthChinaInstituteofWaterConservancyandHydroelectricPowerVol126No12Jun12005
收稿日期:2004-11-20;修订日期:2005-01-30作者简介:纪占玲(1979-),女,河南驻马店人,华北水利水电学院在读硕士研究生,主要从事现代优化方法方面的研究.
文章编号:1002-5634(2005)02-0040-03DPG500型铺轨机旋转喂枕机构虚拟样机动态仿真分析
纪占玲,严大考,上官林建(华北水利水电学院,河南郑州450011)
摘 要:为了确定DPG500型铺轨机在不同工况下的铺轨速度,对用Pro/E软件设计的DPG500型铺轨机旋转喂枕机构的虚拟样机及转速给样机关键零部件造成影响的仿真结果进行了分析,得出铺轨机的最佳铺枕速度范围,可作为工程实践的参考.关键词:虚拟样机技术;DPG500型铺轨机;旋转喂枕机构;仿真分析中图分类号:TP391.9 文献标识码:A
在一般的设计与制造过程中,首先是概念设计和方案论证,然后进行详细设计和样机制造,再进行试验验证,发现缺陷时,修改设计并再评审、验证,通过周而复始的设计)评审)验证)设计,产品才能达到所要求的性能[1].物理样机虽然可以通过安装、调试和运行测试直观地反映真实情况,但是设计制造周期较长,单机的制造成本较高,对于大型工程机械,从人力、物力、财力及产品研发周期等方面来考虑是不现实的.由此,一般的设计与制造方法已无法满足市场的需求.铺轨机是铁路施工的重要设备,反映了铁路施工的机械化水平.在充分调研的基础上,综合国外铺轨机的优点,结合秦沈客运专线一次铺设跨区间无缝线路的经验,设计了具有自己特色的DPG500型铺轨机.DPG500型铺轨机体积庞大,总体作业尺寸为55000@3200@4700(mm),由钢轨牵引车、铺轨车、辅助动力车、运枕龙门吊、轨枕运输车等5大部分组成,采用机电液一体化和PLC集中控制技术.为了完成铺轨机的创新性设计,提高产品的系统性能,利用Pro/E和ADAMS软件进行了铺轨机虚拟样机设计.它的研制为我国铁路建设提供了自己设计制造的铺轨机,推动了21世纪中国铁路无缝线路的发展.1 三维几何造型软件的选用虚拟样机生成的前提是虚拟部件的/制造0.ADAMS软件具有强大的动力学解算器,但其实体建模功能相对比较薄弱,对比较复杂的零部件进行三维实体建模,不能保证模型的尺寸精度和装配的位置精度.而CAD三维几何造型软件能快速、便捷地设计和生成具有未来产品外观特征的三维实体,同时包含机构系统仿真所必须的部件质量、重心位置、转动惯量等内在特征,能够方便地进行装配干涉检查,实现参数化、系列化和多方案设计[2].因而,采用
CAD三维几何造型软件建立具有物理属性的参数化模型,再导入ADAMS.从功能和供应商方面看,CAD和ADAMS是2个完全不同的系统,所以各自的数据都难以被对方识别.要将CAD中创建的实体模型导入到ADAMS环境中,2种软件必须具备某一相同的几何转换模块(如IGES,STEP,STL,Parasolid等),先将CAD数据转换成中性(不依赖于CAD系统),然后将中性数据通过几何数据转换模块转换成ADAMS数据.在几何建模过程中采用Pro/E软件,完成铺轨机旋转喂枕机构的零部件设计和装配,利用Pro/E和ADAMS间专用接口模块MECHANISM/Pro,实现Pro/E和ADAMS间无缝连接,避免不必要的麻烦,减少传送误差.采用这个连接桥梁,Pro/E用户不必退出其熟悉的应用环境就可以快捷、准确地装配模型,定义刚体,创建约束副,添加驱动,施加载荷等[3].完成模型后,只需界面转换,就可以把模型传入ADAMS中,继续添加更复杂的约束、作用力或驱动,然后对模型进行全面的动力学仿真分析和优化设计,消除了由于模型在不同软件之间的传送带来的模型几何形状和质量特性等方面的误差.2 旋转喂枕机构的仿真分析喂枕机构是铺轨机的关键部件,其转速决定了铺轨机的铺枕速度.在DPG500型铺轨机设计过程中,对旋转喂枕机构进行了创新性结构设计,改变了由举升机构和油缸拉动的喂枕机构,完成喂枕功能的传统机构形式.喂枕机构由齿轮箱、喂枕连杆、驱动连杆、张紧装置、挡枕架等部分组成,在1#传送链的端部取枕,并与垂直传送链有固定的传动比,通过齿轮箱中齿轮把运动传给喂枕连杆,喂枕连杆把轨枕准确地放到垂直链的托枕臂上[1].整个结构紧凑、新颖,但能否达到效率高、精度高的要求,将直接决定整机的性能.为此,需要对所设计的旋转喂枕机构进行仿真分析.对于复杂机械系统,采取渐进的原则,将整个系统分解为多个子系统,先对子系统进行仿真分析和试验,排除建模、仿真等过程中隐含的问题,最后进行整个系统的仿真分析试验[4].另外,复杂机械系统
的零部件众多,产生的数据量极大,有些对性能仿真并不重要,需进行简化处理[1].
按照以上原则,借助ADAMS软件进行以下运动仿真分析:¹干涉分析.研究旋转喂枕机构各个构件在旋转过程中有无运动干涉,受力是否合理;º运动分析.研究是否完成了预期的运动(即能否喂枕),在运动仿真过程中有无参数值的突变、仿真的骤停;»设置仿真输出,使用ADAMS/PostProcessor对样机关键零部件在不同转速下的运动特性进行分析,确定样机的主要设计指标)))最佳转速和转速范围.按照图1所示的建模和分析过程,不断地完善模型,修正不当的约束或运动副,增加辅助分析工具,完成旋转喂枕机构虚拟样机的运动仿真分析.
图1 旋转喂枕机构的仿真分析流程 喂枕连杆顶点位移曲线如图2所示.通过动态仿真,及时对设计方案进行修改,最终实现了所设计的零部件间无干涉,能够实现喂枕的功能.图2 喂枕连杆顶点位移曲线 由于铺轨机运行于多种工况,在不同的工况下需要采用不同的铺枕速度,为此需要确定铺轨机的最佳铺枕速度和速度范围.利用不同的转速对喂枕连杆、驱动轴、传动轴、曲柄轴等关键部件所造成的影响进行分析,得到不同转速下的仿真输出结果见表1. 从表中可以看出,当转速为14r/min时,喂枕连杆顶点的加速度、角加速度、传动轴角加速度、曲柄轴角加速度相对变化幅度较大,即突变情况严重,因此转速14r/min是最不理想的情况;当转速为8r/min,10r/min,15r/min,18r/min时,喂枕连杆的角加速度、传动轴角加速度、曲柄轴角加速度的最大值、相对变化值均为峰值点,机构运行不稳定;当转速为12r/min,13r/min,20r/min时,喂枕连杆、驱动轴和曲柄轴的角加速度最大值较小,相对变化较小.因此转速为12r/min,13r/min,20r/min时的铺轨速度比较理想.对铺轨机而言,转速决定铺枕的效率;加速度、角加速度表明部件的受力情况、运转时的冲击和噪
41第26卷第2期纪占玲等: DPG500型铺轨机旋转喂枕机构虚拟样机动态仿真分析 表1 不同转速下的仿真结果链轮转速n/(r#min-1)
喂枕连杆顶点驱动轴传动轴曲柄轴加速度/(mm#s-2)角加速度/(rad#s-2)角加速度/(rad#s-2)角加速度/(rad#s-2)角加速度/(rad#s-2)minmaxminmaxminmaxminmaxminmax201.63E031.63E031.88E-149.55E-060.07.96E-050.01.21E-040.08.12E-05181.32E031.32E030.01.05E-030.05.67E-050.01.25E-040.01.50E-03161.04E031.04E030.05.41E-040.05.67E-050.08.44E-050.08.00E-04159.16E029.17E022.83E-141.99E-020.04.14E-050.08.00E-040.02.90E-02147.99E023.00E050.07.64E-030.04.04E-050.08.48E-030.01.11E-04136.89E026.89E021.37E-156.75E-060.04.04E-050.04.08E-050.06.08E-05125.87E025.87E020.02.09E-050.03.34E-050.03.34E-050.05.03E-05114.93E024.93E020.03.22E-030.03.34E-050.06.08E-050.04.70E-03104.07E024.07E021.31E-158.85E-030.03.34E-050.09.80E-030.01.28E-0293.30E023.30E020.02.68E-040.02.59E-050.04.24E-050.04.00E-0482.62E022.61E020.04.37E-020.02.64E-050.04.24E-050.06.33E-0261.47E021.47E020.03.20E-030.01.68E-050.01.27E-040.04.70E-03
音,给部件寿命及周围环境带来的影响,进而决定零件材料的尺寸大小及形式的设计,从而影响铺轨机的总尺寸、重量、成本等.当只考虑部分因素时,自然是效率越高越好.但是当转速较高时,喂枕连杆的加速度较大,轨枕在接传的过程中受到较大的冲击,会严重损伤;当转速较低时,部件及轨枕受到的冲击可能较小,但不满足DPG500型铺轨机高效率的要求.综合以上多种因素,确定每班(8h)铺轨2.0km、枕间距600mm情况下,最佳旋转速度为12r/min,转速范围为8~15r/min,根据不同的工况尽量按12r/min或13r/min,11r/min或9r/min,8r/min、10r/min或15r/min的优先级选择.根据旋转喂枕机构的转速与铺轨机的铺枕速度的关系,确定DPG500型铺轨机的最佳铺枕速度范围.3 结 语利用Pro/E与ADAMS软件完成了铺轨机的旋转喂枕机构虚拟样机设计,通过仿真分析在设计早期便确定了DPG500型铺轨机的最佳铺枕速度及其范围,为DPG500型铺轨机的生产奠定了坚实的基础.
参 考 文 献[1]王国强,张进平,马若丁.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.[2]詹友刚.Pro/ENGINEER2001教程[M].北京:清华大学出版社,2002.[3]李军.ADAMS实例教程[M].北京:北京理工大学出版社,2002.[4]郑建荣.ADAMS)虚拟样机技术入门与提高[M].机械工业出版社,2002.
SimulationandAnalysisofVPT_basedRevolvingMachinerytoFeedSleepersofDPG500ModelLongRailWayMachine