基于四元数的6—SPS并联机器人姿态奇异研究
基于四元数表示法的并联机构姿态奇异研究

Vo . No 4 17 . Au 2 O g. O8
文 章 编 号 :6 1—74 (0 8 0 17 17 20 )4~0 4 4 3—0 5
基 于 四元 数 表 示 法 的 并 联 机构 姿 态 奇异 研 究
曹 毅 李保坤 周 , , 辉
( .江 南大 学 机 械 工程 学 院 , 苏 无锡 24 2 ; .安徽理 工 大 学 机械 工程 学 院 , 1 江 1 12 2 安徽 淮南 220 ) 30 1 摘 要 : 于单位 四元 数表 示 并联 机 构动 平 台的姿 态 , 导 出当 66S S型 Se at 基 推 / 一P t r并联机 构 动平 w
关键 词 :单位 四元 数 ;并联 机构 ;姿态 奇异 ;姿 态 能力
中图分 类 号 : P2 2 2 H 1 2 6 T 4 . ;T 1 . 文 献标 识码 : A
O re a i n- ng l rt na y i fPa a l l i nt to Si u a iy A l sso r le
c pa iiy o h /6 S S e r m a p a o . Th c n l i n pr s nt d n hi pa e pr v de a b lt f t e 6 一 PS t wa t ni ul t r e o c uso e e e i t s pr oi s u e l i g t e r tc lg o dsf rt e o i u de i n o he6 nd ry n h o ei a r un o h ptm m sg ft /6一 SPS Stw a tm a i l t r e r n pu ao . K e o ds u tquae n o y w r : ni t r i n;pa a llm a pu a o ;o i n ai n—i g l rt o i nt to a biiy r le ni l t r re t to s n u a iy; re a i n c pa lt
基于视觉的并联机器人位姿检测方法研究

研究内容与方法
研究内容
本研究旨在研究基于视觉的并联机器人位姿检测方法,解决现有位姿检测方法的 问题,提高机器人的运动精度和稳定性。具体研究内容包括:视觉系统的设计与 优化、图像处理与位姿解算算法的开发、实验平台的搭建与测试等。
研究方法
本研究采用理论分析和实验验证相结合的方法,首先设计并优化视觉系统,然后 开发图像处理与位姿解算算法,最后搭建实验平台进行测试和验证。同时,将采 用文献综述和实验对比等方法,对研究成果进行全进一步探索深度学习、 强化学习等先进技术在并联机器人位 姿检测中的应用,提高检测的精度和
自动化程度。
应用前景与展望
基于视觉的并联机器人位姿检测方法具有广泛的应用前景 ,可用于工业自动化、航空航天、医疗等领域。
随着计算机视觉技术和机器人技术的不断发展,该方法有 望在更多应用场景中得到推广和应用,为智能制造、智慧 医疗等领域的发展提供有力支持。
图像获取与处理
图像获取
使用相机拍摄目标物体的图像,获取原始图像数据。
图像处理
对获取的原始图像进行预处理,如滤波、去噪、增强等操作,以提高图像的质量和清晰度,为后续的 特征提取和匹配提供更好的基础。
特征提取与匹配
特征提取
从预处理后的图像中提取出目标物体的特 征信息,如边缘、角点、纹理等,这些特 征信息可以有效地描述目标物体的形状和 位置。
THANKS
感谢观看
特征提取方法包括SIFT、SURF、ORB等,这些方法可以提取出图像中的关键点及 其描述子。
匹配过程通常采用最近邻匹配或最小二乘法等算法实现。
基于深度学习的位姿检测算法
01
基于深度学习的位姿检测算法 是利用深度神经网络对图像进 行学习,从而直接估计机器人 位姿的方法。
《2024年6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》范文

《6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》篇一一、引言随着机器人技术的不断发展,并联机器人因其高精度、高刚性和高负载能力等优点,在工业生产、医疗康复、航空航天等领域得到了广泛应用。
其中,6PUS-UPU冗余驱动并联机器人作为一种新型的并联机器人结构,具有较高的灵活性和稳定性,成为了当前研究的热点。
然而,对于这种复杂的机器人系统,如何实现其冗余力控制,以提高其工作效率和运动性能,仍是一个待解决的问题。
本文以6PUS-UPU冗余驱动并联机器人为研究对象,对其冗余力控制进行实验研究。
二、6PUS-UPU冗余驱动并联机器人概述6PUS-UPU冗余驱动并联机器人是一种具有六条腿和UPU结构的并联机器人。
其特点在于采用了冗余驱动设计,使得机器人在运动过程中具有更高的灵活性和稳定性。
然而,由于冗余驱动的存在,机器人在运动过程中会产生冗余力,如何有效地控制这些冗余力,是提高机器人工作效率和运动性能的关键。
三、冗余力控制方法针对6PUS-UPU冗联机器人的冗余力控制问题,本文采用了一种基于优化算法的控制方法。
该方法通过优化机器人的关节力矩,实现对冗余力的有效控制。
具体而言,我们采用了遗传算法和梯度下降算法相结合的方法,对机器人的关节力矩进行优化,以达到控制冗余力的目的。
四、实验设计与实施1. 实验准备:为了验证所提出的冗余力控制方法的有效性,我们设计了一系列实验。
首先,我们搭建了6PUS-UPU冗余驱动并联机器人的实验平台,并对机器人进行了充分的调试和校准。
其次,我们设计了实验任务,包括机器人的运动轨迹规划、关节力矩的测量等。
2. 实验过程:在实验过程中,我们首先对机器人进行空载和负载条件下的运动测试,以获取机器人在不同条件下的运动数据。
然后,我们采用所提出的优化算法对机器人的关节力矩进行优化,并记录优化前后的关节力矩和运动数据。
最后,我们通过对比实验数据,分析所提出的冗余力控制方法的有效性。
五、实验结果与分析1. 实验结果:通过实验数据的对比分析,我们发现所提出的优化算法能够有效地控制6PUS-UPU冗余驱动并联机器人的冗余力。
神经网络求6-SPS并联机器人正运动学精确解
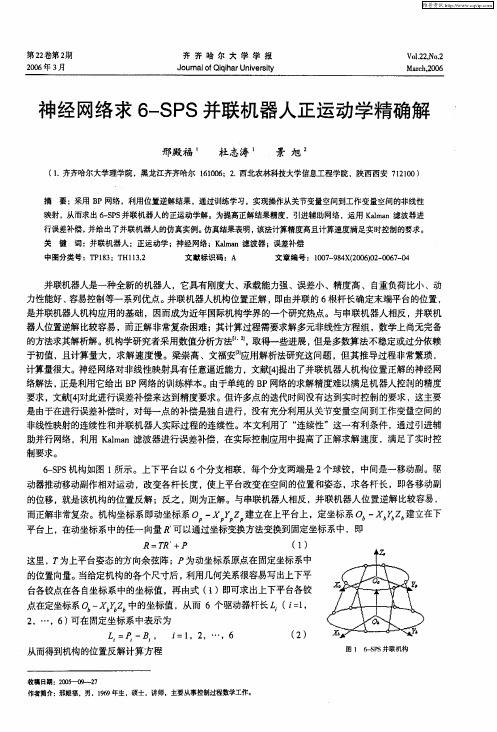
L = —B , i ,2 , =1 ,… ,6 ( 2)
图 1 6 S S并联机 构 -P
从而得到机构的位置反解计算方程
收稿 日期 :20-- - 2 05-1 - 7 -( -9
作者简介: 邢殿福, .16 年生 , 男 99 硕士.讲师 , 主要从事控制过程数学工作。
于初值,且计算量大,求解速度慢。粱崇高、文福安 应用解析法研究这问题,但其推导过程非常繁琐,
计算量很大。 神经网络对非线性映射具有任意逼近能力 , 文献[提出了并联机器人机构位置正解的神经网 4 ] 络解法 , 正是利用它给出 B P网络的训练样本。 由于单纯的 B P网络的求解精度难以满足机器人控制的精度
是并联机器人机构应用的基础 ,因而成为近年国际机构学界 的一个研究热点。与串联机器人相反 , 并联机
器人位置逆解比较容易,而正解非常复杂困难;其计算过程需要求解多元非线性方程组 , 数学一 尚无完备 - I .
的方法求其解析解。 机构学研究者采用数值分析方法“ , ’ 取得一些进展 , 但是多数算法不稳定或过分依赖
关 键 词 :并联机 器人 :正运动学 ;神经 网络 ;K l a a n滤波器 ;误差补偿 m 中图分类号 :T 13 H132 P 8 ;T 1. 文献标识码 :A 文章编号 :10 — 8X(060 — 0 7 0 0 7 9 ,它具有刚度大、承载能力强 、误差小 、精度高 、自重负荷 比小 、 动 力性能好、 容易控制等一系列优点。 并联机器人机构位置正解 , 即由并联的 6 根杆长确定末端平 台的位置 ,
=
豫’ +尸
( ) 1
这里 , 为上平台姿态的方 向余弦阵 ; 户为动坐标系原点在固定坐标系中 的位置向量。 当给定机构的各个尺寸后 , 利用几何关系很容易写出上下平 台各铰点在各 自 坐标系中的坐标值 ,再由式 ( )即可求 出上下平台各铰 1
基于四元数互补滤波的无人机姿态解算_吕印新
第 38 卷 第 2 期 2014 年 3 月燕山大学学报 Journal of Yanshan UniversityVol. 38 No. 2 Mar. 2014文章编号:1007-791X (2014) 02-0175-06基于四元数互补滤波的无人机姿态解算吕印新 1,肖前贵 2, *,胡寿松 12. 南京航空航天大学 无人机研究院, (1. 南京航空航天大学 自动化学院, 江苏 南京 210016; 江苏 南京 210016) 摘 要:针对无人机低成本姿态解算这一基本问题,考虑到传统姿态算法运算量大、不易调试,采用微惯性单元 (MEMS) 测量无人机原始姿态数据,采用基于四元数的互补滤波算法,有效降低姿态解算的运算量,实现 MEMS 各传感器的信息融合。
从理论上证明了基于四元数的互补滤波器的稳定性,分析了滤波器的性能。
采用 无人机真实数据验证了算法的有效性,解算得到的俯仰角、滚转角精度小于 1°,航向角精度小于 2°。
与传统姿 态算法比较,本算法简单有效、运算量小、易于调试。
关键词:姿态;四元数;互补滤波 ;稳定性分析 中图分类号:V243.5 文献标识码:A DOI:10.3969/j.issn.1007-791X.2014.02.0150引言微小型无人机具有成本低、隐蔽性好、生存能EKF 算法。
然而 EKF 存在 3 大缺陷:1) 在一般 情况下计算雅可比矩阵是不容易实现的过程, 而且 2) 其计算量很大; 当线性化假设不成立时,线性 化会导致滤波器极度不稳定;3) 实际应用中,噪 声难以符合白噪声的要求 [2-3]。
文献 [4-5] 利用粒 子滤波解决了系统非线性、 非白噪声对姿态解算的 影响,然而此方法计算量较大,不适合低成本航姿 系统的应用。
互补滤波器算法简单可靠,对惯性器 件的精度要求较低, 在飞行器姿态解算中的应用愈 加广泛。
文献 [6-7] 分别给出了欧拉角、方向余弦 矩阵形式下的互补滤波, 然而在飞行器存在运动加 速度的时候,姿态解算的误差较大。
6_6_SPS型Stewart并联机构运动学正解的研究(1)

试验研究现代制造工程2008年第3期6/6 S PS型Ste wart并联机构运动学正解的研究*周辉,曹毅(江南大学机械工程学院,无锡214122)摘要:对具有半对称结构的6/6 SPS型S te w art并联机构的运动学正解进行了研究。
建立了一类具有半对称结构的6/6 SPS型S te w art并联机构运动学正解的数学模型,构造了一个关于该并联机构动平台位置参数及姿态参数的多元多项式方程组。
基于该方程组并采用M athe m atica符号计算软件,编制了基于M athe m atica语言的6/6 SPS型Stewa rt并联机构运动学正解的求解程序,计算结果表明,对于任意给定的该并联机构的结构参数以及六个驱动杆杆长,该类6/6 SPS型Stew art并联机构的运动学正解在复数域内最多有28组解析解。
并联机构运动学正解的研究为该类并联机构的工作空间分析、轨迹规划及控制奠定了重要的理论基础。
关键词:Ste w art机构;运动学正解;符号计算;M a t he m atica软件中图分类号:TP242.2 文献标识码:A 文章编号:1671 3133(2008)03 0001 05D irect kinem atics anal ysis of a speci a l class ofthe6/6 SPS Ste w artm ani pul atorsZhou H u,i Cao Y i(School ofM echan ica lEng i n eeri n g,Jiangnan Un i v ersity,W ux i214122,Jiangsu,CHN) Abstrac t:A ddresses t he direct kinem ati cs of a spec i a l c l ass of the6/6 SPS Ste w art m ani pulators i n wh i ch the mov i ng and base p l a tfor m s are t w o si m ilar sem isymm etr i ca l hex agons.A fte r proposi ng a m athe m atica lm ode l o f the d irect k i ne m atics of t h i s special class o f t he Ste w art m an i pu lators,a m ulti v ariate po lyno m ial equati ons se t i n the m oving p l atfor m pos iti on para m eters and or i enta ti on para m eters is constructed i n wh ich i npu t para m ete rs are geo m etric para m eters and the li nk length o f each li m b of t h is special class o f the6/6 SPS S te w art m an i pu lators.Based on t h ism ultivar i ate polynom ia l equa tions se t,an a l go rith m has been deve l oped inM a t he m a tica l anguag e for so lv i ng the d i rect k i ne m atics of t h is specia l c lass o f the6/6 SP S Stew artm anipulators by utilizi ng a sy m bo li c computati on so ft w are M athem ati ca,co m puta tion results first sho w tha t t he m ax i m u m number of the co m plete analytical so l uti on to t he direct k i ne m atic prob l em of t h is spec i a l class of t he6/6 SPS Stewart m an i pulators is up t o28i n the co m plex do m ain for any g i ven set of geo m etric para m eters and si x g iven li nk leng t hs o f the man i pu l a t o r cons i dered.D irec t k i ne m atic analysis o f th i s special c lass o f t he6/6 SPS Stewart m an i pu l a tors paves under l y i ng theoretical g rounds for the wo rkspace ana l y si s,pa t h p l ann i ng and contro l o f th i s specia l c lass o f the6/6 SPS S te w art m an i pu l a tors.K ey word s:Stewart m ani pulator;D irect kinem ati cs;Symbo lic co m putation;M athem ati ca so ft w are0 引言S te w art平台具有承载能力强、刚度好、无积累误差、精度高、系统动态响应快等特点[1],在飞行模拟器、机器人、新型机床等领域得到广泛应用。
基于四元数互补滤波的无人机姿态解算
基于四元数互补滤波的无人机姿态解算本文提出了一种基于四元数互补滤波的无人机姿态解算方法。
该方法通过对四元数的互补滤波来对无人机的姿态进行估计,实现了对无人机运动状态的实时监测和控制。
同时,本文还对该方法进行了实验验证,结果表明该方法具有较高的精度和实用性。
关键词:四元数;互补滤波;无人机姿态解算;估计;监测一、引言随着无人机技术的飞速发展,无人机在军事、民用等领域的应用越来越广泛。
然而,无人机的飞行控制与稳定性问题一直是无人机技术的瓶颈之一。
其中,无人机姿态解算技术是实现无人机飞行控制的关键技术之一。
无人机姿态解算指的是通过传感器采集的数据,对无人机的姿态进行估计和推算,以实现对无人机运动状态的实时监测和控制。
传统的无人机姿态解算方法主要基于欧拉角和旋转矩阵等数学模型,但这些方法存在着欧拉角奇异性和旋转矩阵计算复杂等问题,导致无法满足实际应用需求。
因此,近年来,越来越多的研究者开始探索基于四元数的无人机姿态解算方法。
四元数是一种具有四个实数分量的数学对象,可以用来表示旋转、姿态等信息。
相比于欧拉角和旋转矩阵等传统数学模型,四元数具有计算简单、不存在奇异性等优点,因此在无人机姿态解算领域得到了广泛应用。
而互补滤波是一种常用的信号处理方法,可以对多个信号进行加权平均,从而得到更加准确的结果。
因此,本文提出了一种基于四元数互补滤波的无人机姿态解算方法,以解决传统方法存在的问题。
二、基于四元数互补滤波的无人机姿态解算方法1.四元数表示姿态四元数可以用来表示旋转、姿态等信息,其具有简单的计算方式和不存在奇异性等优点。
因此,本文采用四元数来表示无人机的姿态信息。
四元数可以表示为:q = a + bi + cj + dk其中,a、b、c、d为实数分量,i、j、k为三个虚数分量,满足: i = j = k = ijk = -1四元数可以表示旋转、姿态等信息,其中,a为实部,b、c、d为虚部,表示旋转轴和旋转角度。
关于6-SPS并联机器人机构工作空间的研究
关于6-SPS并联机器人机构工作空间的研究
李瑞琴;刘惠林
【期刊名称】《北京理工大学学报》
【年(卷),期】1992(12)4
【摘要】提出用数值分析与优化相结合的方法对6-SPS并联机器人机构的工作空间进行研究.根据该机构的特点和应用需要,把上平台中心可达范围分别定义为定姿态可达空间和工作空间两类.对于给定结构参数的6-SPS机构,在确定工作空间的最高点和最低点后,即可快速计算出其工作空间的边界.考察了结构参数对工作空间的影响,得出一些规律性变化关系.这些结果可以用来确定6-SPS并联机器人机构的实际结构参数。
【总页数】9页(P100-108)
【关键词】机器人;并联机器人;工作空间
【作者】李瑞琴;刘惠林
【作者单位】北京理工大学机械工程系
【正文语种】中文
【中图分类】TP242.2
【相关文献】
1.6-SPS并联机器人工作空间研究 [J], 詹友基;贾敏忠
2.6-SPS并联机器人工作空间的边界曲面分析方法 [J], 范守文;徐礼钜
3.6-SPS并联机器人工作空间的一种新型求解方法 [J], 王艺博;马建涛
4.6-SPS并联机器人工作空间的一种新型求解方法 [J], 王艺博;马建涛
5.6-SPS台体型并联机器人工作空间及转动能力研究 [J], 赵迎祥;李天恩;王娟平因版权原因,仅展示原文概要,查看原文内容请购买。
基于四元数方法的姿态解算方法分析
基于四元数方法的姿态解算方法分析摘要:载体的姿态解算算法是实现捷联式惯性导航系统精确导航的核心技术之一。
分析了欧拉法、方向余弦法、四元数法求解姿态矩阵的优缺点,采用四元数法与方向余弦法两种解算方法分别计算载体姿态,两种方法的计算结果之差与理论真值比较以得到解算的相对误差,从而验证了四元数法的正确性和有效性。
最后,指出提高采样频率和采用高阶计算算法能进一步减小姿态解算误差。
数字化仿真与转台试验结果表明,本文提出的载体姿态解算法具有良好的实时性。
1引言捷联惯导是一种自主式的导航方法。
该方法将陀螺仪和加速度计直接安装在载体上,省掉机电式导航平台,利用计算机软件建立一个“数学平台”来代替机电平台实体[1]。
由于其结构简单且抗干扰能力强,目前已成为航空航天、航海、机器人、智能交通等领域的研究热点之一。
姿态解算是捷联式惯性导航系统的关键技术,通过姿态矩阵可以得到载体的姿态和导航参数计算需要的数据,是捷联式惯导算法中的重要工作。
载体的姿态和航向体现了载体坐标系与导航坐标系之间的方位关系,确定两个坐标系之间的方位关系需要借助矩阵法和力学中的刚体定点运动的位移定理。
通过矩阵法推导方向余弦表,而刚体定点运动的位移定理表明,定点运动刚体的任何有限位移都可以绕过定点的某一轴经过一次转动来实现。
目前描述动坐标相对参考坐标系方位关系的方法有多种,可简单地将其分为3类,即三参数法、四参数法和九参数法「1-2]。
三参数法也叫欧拉角法,四参数法通常指四元数法,九参数法称作方向余弦法。
欧拉角法由于不能用于全姿态飞行运载体上而难以广泛用于工程实践,且实时计算困难。
方向余弦法避免了欧拉法的“奇点”现象,但方程的计算量大,工作效率低。
随着飞行运载体导航控制系统的迅速发展和数字计算机在运动控制中的应用,控制系统要求导航计算环节能更加合理地描述载体的刚体空间运动,四元数法的研究得到了广泛重视。
本文全面分析了3种解算方法的特点,通过对比四参法与九参法的计算结果以验证四元数法的正确性和有效性,基于数值仿真和转台实验相结合的分析方法得到进一步减少姿态解算误差的有效途径,为捷联式惯性导航技术的工程实践提供参考。
基于四元数计算的机器人空间姿态控制方法
基于四元数计算的机器人空间姿态控制方法随着机器人技术的不断发展,机器人应用越来越广泛。
机器人空间姿态控制方法是机器人技术中十分重要的一部分。
在基于四元数计算的机器人空间姿态控制方法中,四元数是最主要的数学工具,其运算方式与复数类似,但是拥有更强大的表达能力。
下面将介绍基于四元数计算的机器人空间姿态控制方法的基本原理。
一、四元数的基本概念四元数是一种与复数类似的数学工具,其表示形式为:$$q=q_0+q_1\boldsymbol{i}+q_2\boldsymbol{j}+q_3\boldsymbol{k}$$其中$q_0,q_1,q_2,q_3$为实数,$\boldsymbol{i},\boldsymbol{j},\boldsymbol{k}$为$i$、$j$、$k$三个虚数单位,它们满足以下运算法则:$$\boldsymbol{i}^2=\boldsymbol{j}^2=\boldsymbol{k}^2=\boldsymbol{ijk}=-1$$$$\boldsymbol{ij}=\boldsymbol{k},\boldsymbol{jk}=\boldsymbol{i},\boldsymbol{ki }=\boldsymbol{j},\boldsymbol{ji}=-\boldsymbol{k},\boldsymbol{kj}=-\boldsymbol{i},\boldsymbol{ik}=-\boldsymbol{j}$$四元数有加减乘除的运算法则,其中乘法运算是四元数中最关键的一部分。
四元数乘法的运算法则与复数相似,但是需要额外处理虚数单位$\boldsymbol{i},\boldsymbol{j},\boldsymbol{k}$ 的积,即$\boldsymbol{ij},\boldsymbol{jk},\boldsymbol{ki}$ 。
二、机器人空间姿态的表示机器人在三维空间中的运动状态可以用空间姿态表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ab ta t B s d o h e r s n ain o n tq ae no oo in a in o ii o y,t eo in a in sn sr c : a e n t er p e e t t f i u tr i nt re tto frgd b d o u h re t to —i —
u igc mp tr ti s o h tt em eh ns a ei o — re t t nasn u a r ev i h — sn o u e .I h wnt a h c a imsh v h meo o n
维普资讯
第2 卷 6
第4 期
安徽理工大学学报( 自然科学版)
J u n l fAn u iest fS in ea dTe h oo y Na u & ce c ) o r a h i o Unv ri o ce c n c n lg ( t r lS in e y
l t p r m e e p c r u d t e o i i . I i e o e h tt e mi i u i s r b d s h r a e s a c e e a a t rs a e a o n h rg n t s d n t d t a h n m m n c i e p e e c n b e r h d
摘 要: 基于四元数描述刚体的姿态, 一s s并联机器人姿态奇异做 了研究 , 免 了欧拉 角 对6 P 避 描述 刚体 姿 态时 的奇 异性 。 导 出6 P 推 一S S并联机器 人 动平 台处 于给定位 置时机 构 在三 维 空 间 中的姿 态奇 异轨迹 解析 表达 式, 并利 用计算机 给 出其姿 态奇 异轨迹 的三 维 可视化 描 述 。 到在 得 关于姿态参数的三维空间内的原点附近存在一个非奇异姿 态空间, 出在此 非奇异姿 态空间 提 内部 寻 找一个 最 小 内切球 , 以此 球半 径作 为衡量机 构 在给定 位置 时 的姿 态能 力 的性能 指 标 , 并 最 后研 究 了机构 构 形以及 动平 台位置 对姿 态能 力的 影响 。
f ri sd h o sn u a re t t n v i o n i et en n ig lro in ai od,a d t e rd u su e o me s r h re t to a a i t . o n h a isi s d t a u e t eo in a in c p b l y i Th a e d rs e fe t fg o ty c n iu ain o h a iu a o n h o i o ft emo i g ep p ra d e s sefc so e me r o fg rto ft em np lt ra d t ep st no h vn i p af r o h r n a in c p bl y lto m n t eo i t t a a it . e o i
lg f e h nc l n ie r g S u h r a g z ie s y Wu i i g u 2 4 2 , hn } .C l g f e h nc l g— e eo c a i gn e i , o t en Y n te M aE n Unv ri , x a s 1 1 2 C i 3 ol eo c a i i t Jn a e M a En
g lrt srs a c e n t ep p r u aiy i e e r h d i h a e .De u e st esn ua iye p e so f6 S S p r l l a i u ao d c d i h ig lrt x r s in o 一 P a al np lt r em
Vo . 6 No 4 【2 .
De .2 06 c 0
20 0 6年 1 2月
基于 四元数的 6 P 一S S并联机 器人姿态奇异研 究
李保坤 曹毅 黄真。张文祥 张凌云。 , , , ,
(. 1 安徽理 工大 学机 械工程系 , 安徽 程学 院, 河北 秦皇 岛 0 6 0 ) 60 4 淮南 2 20 }.江南大学机械工程学院 , 3 0 12 江苏 无锡 2 4 2 }.燕 山大学机械 工 1123
M a iua o igUntQu tr in np lt rUsn i a eno
LIBa — u CAO 。 HU ANG h n , ok n , Yi, Z e 。 ZHANG e . in W n xa g
Z HANG n u Li g y n
( .De t fM e h nc l gn e ig,An u iest fS in ea dTeh oo y, an nAu u 3 0 1 C n 2 1 p .o c a ia En iern hi Unv riyo e c n c n l g Hu ia h i2 2 0 , hia} .Co- c l
关键 词 : 四元数} 并联机器人 } 姿态奇异} 姿态奇异轨迹} 姿态能力
中圈分类号 : P 4 . T 2 22
文献标识码: A
文章编号 :62 082 60. 4. 17. 9( 0) 0 1 5 1 0 40 0
Ore t to — i g l rt a y i f 6 S r l l in a i n S n u a iy An l ss o 一 PS Pa a l e
i h l r p r m e e p c ta c r an p s t n Th n t e o i n a i n sn u a i o i s d s rb d b n t e Eu e a a t r s a e a e t i o ii . o e h re t t — i g lr t l c e c i e y o y i