低开关频率下异步电机电流环的数字控制
基于电流滞环控制的异步电机变频调速系统的研究与实现
摘要在异步电机变频调速系统中电流控制技术占有极其重要的地位,电流滞环控制器因其实现简单、电流响应快、内在的峰值电流限制等优点而被广泛使用。
传统固定滞环宽度的电流控制器自关频率变化范围大而导致系统性能下降。
在总结国内外学者提出的各种方法后,文采用同步开关法电流滞环控制器来实现异步电机的变频调速,该方法实现简单,性能优良,值得推广。
本文主要介绍了基于电流滞环控制及C805IF015单片机实现的异步电机变频调速系统的研究与实现。
文中首先给出异步电机矢量控制的基本原理并分析转差频率矢量控制的基本原理;接下来介绍各种电流控制技术的优缺点,分析固定滞环宽度电流控制型PWM逆变器功率开关器件的开关规律,并指出它的不足之处:然后介绍国内外相关文献给出的各种改进方案,这些方法在保留传统电流滞环控制的各种优点的同时.或者减小了开关频率并使其接近恒定甚至恒定不变,或者减小了三相之间的关联;之后给出了基于同步开关法的电流滞环控制PWM逆变器的异步电机变频调速系统的软、硬件结构及各功能模块的原理、设计与实现,还介绍了该系统所使用的C805IF015单片机;最后给出开环系统和闭环系统的宴验结果。
实验证明,采用电流滞环控制的异步电机交频调速系统具有实现简单、电流响应快、准确性好、鲁棒性强等优点,并且有内在的峰值电流限制特点。
1绪论1.1交流电机控制系统的发展和现状电机控制系统主要分为速度控制和位置控制两大类。
传统的电气传动系统一般指速度控制系统,广泛应用于机械、矿山、冶金、化工、纺织、造纸、交通等工业部门。
位置(伺服)系统,也就是运动控制系统是指通过伺服驱动装置将给定指令变成期望的机构运动.直流电机由于控制简单、调速平滑、性能良好,一直占据主导地位,然而,直流电机结构上存在的机械换向器和电刷,使其具有一些难以克服的固有缺点,如造价偏高,维护困难,寿命短,单机容量和最高电压都受一定限制等等。
交流电机(特别是异步电机)具有结构简单、坚固、运行可靠的特点,在单机容量、供电电压和速度极限等方面均优于直流电机。
三相异步电动机连续控制电路

三相异步电动机连续控制电路一、引言三相异步电动机是工业生产中最常用的电动机之一。
它具有结构简单、使用可靠、运行平稳等特点,被广泛应用于各种机械设备中。
在实际应用中,为了满足不同的工艺要求和实现自动化控制,需要对三相异步电动机进行连续控制。
本文将介绍三相异步电动机连续控制电路的相关知识。
二、三相异步电动机基础知识1. 三相异步电动机的结构和工作原理三相异步电动机由定子和转子两部分组成。
定子上布置着三个对称排列的同心圆形线圈,称为定子绕组。
转子上也布置着类似的线圈,称为转子绕组。
当通过定子绕组通以交流电时,在定子内形成旋转磁场,磁场旋转速度等于供电频率除以极对数。
由于转子中也存在磁场,因此在磁场作用下,转子会受到一个旋转力矩,并随着旋转磁场而旋转。
2. 三相异步电动机的运行特性三相异步电动机具有以下运行特性:(1)起动特性:三相异步电动机的起动需要通过一定的方法来实现,常用的方法有直接启动、降压启动和星-三角启动等。
(2)空载特性:当三相异步电动机处于空载状态时,其转速会略高于额定转速。
(3)负载特性:当三相异步电动机处于负载状态时,其转速会下降,但不会低于额定转速。
三、三相异步电动机连续控制电路1. 三相异步电动机连续控制原理三相异步电动机连续控制是指通过改变电源对电机的供电方式和供电参数,来实现对电机的运行状态进行调节。
常用的控制方式有调速、正反转和制动等。
其中调速是最常见的一种控制方式。
2. 三相异步电动机调速控制原理调速是通过改变供电频率或改变供电电压来实现对三相异步电动机转速进行调节。
常用的调速方法有变频调速和降压调速两种。
(1)变频调速变频调速是指通过将交流供电源经过整流、滤波、逆变等处理后,得到一个可变频率、可变幅值的交流输出,从而实现对电机转速的调节。
变频调速的优点是调速范围大,控制精度高,但成本较高。
(2)降压调速降压调速是指通过改变电源对电机的供电电压来实现对电机转速的调节。
常用的降压调速方法有自耦降压启动、稳压变压器降压启动和可控硅降压启动等。
异步电机磁链转矩双闭环模糊PID控制仿真
异步电机磁链转矩双闭环模糊PID控制仿真MATLAB软件包括MATLAB主程序和许多日益增多的工具箱。
工具箱实际就是用MATLAB基本语句编写的各种子程序集,用于解决某一方面的专门问题或实现某一类的新算法。
MATLAB提供了与其他应用语言的接口,以实现数据的共享和传递。
本文将模糊控制和PID控制结合在一起,根据各自的特点构造了一个自整定模糊PID控制系统,并在MATLAB中的模糊逻辑工具箱和SIMULINK基础上,对该控制系统进行了仿真研究。
异步电机动态控制需要建立电机的动态数学模型,Simulink中的交流电动机模型就是建立在矢量坐标变换基础上的动态模型,在矢量控制系统中坐标变换和磁链观察都是矢量控制系统的重要方面。
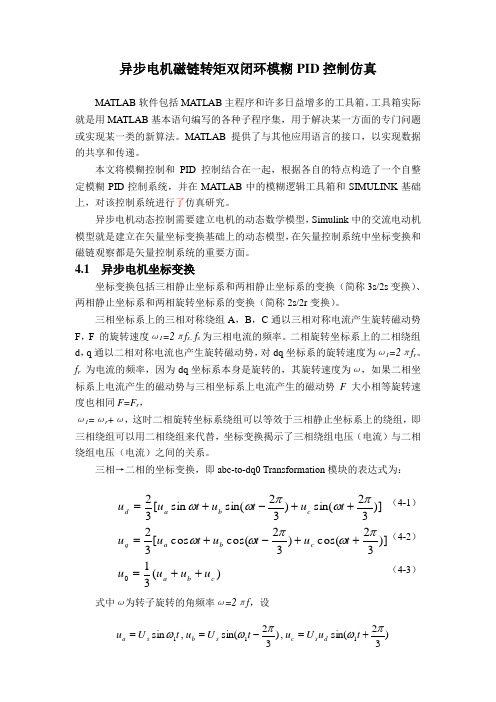
4.1 异步电机坐标变换坐标变换包括三相静止坐标系和两相静止坐标系的变换(简称3s/2s变换)、两相静止坐标系和两相旋转坐标系的变换(简称2s/2r变换)。
三相坐标系上的三相对称绕组A,B,C通以三相对称电流产生旋转磁动势F,F 的旋转速度ω1=2πf s。
f s为三相电流的频率。
二相旋转坐标系上的二相绕组d,q通以二相对称电流也产生旋转磁动势,对dq坐标系的旋转速度为ω1=2πf r。
f r为电流的频率,因为dq坐标系本身是旋转的,其旋转速度为ω,如果二相坐标系上电流产生的磁动势与三相坐标系上电流产生的磁动势F大小相等旋转速度也相同F=F r,ω1=ωr+ω,这时二相旋转坐标系绕组可以等效于三相静止坐标系上的绕组,即三相绕组可以用二相绕组来代替,坐标变换揭示了三相绕组电压(电流)与二相绕组电压(电流)之间的关系。
三相→二相的坐标变换,即abc-to-dq0 Transformation模块的表达式为:4-2)4-3)式中ω为转子旋转的角频率ω=2πf,设sin )sin(cos )cos(011==-==-=u t U t U u t U t U u r s s q r s s d ωωωωωω(4-4)将其带入得(4-5) (4-6) (4-7)在二相旋转坐标系上,电压幅值为U s ,频率为f r =f s -f二相→三相的坐标变换关系,即dq0-abc transformation 模块的表达式为:(4-8) (4-9)(4-10)模块的abc 端输入或输出三相信号,dq0端输入或输出二相信号和0轴信号,信号。
异步电机控制策略
异步电机控制策略1. 矢量控制 (Vector Control)矢量控制是一种常用的高性能控制策略,可以实现对异步电机转速和转矩的精确控制。
它通过对电机的电流和转子磁链进行测量和控制来实现。
矢量控制可以实现电机的恒定转矩运行,提高电机的动态响应性能,并且可以在额定转矩下实现变速运行。
2.感应电动机-电动车流量控制感应电动机减速限流技术是目前电动车用异步电机驱动技术中使用较多的一种技术,通过减小电动车感应电机输入端电流来减小异步电动机的负载,从而达到更好的减速控制效果。
特点是简单易行,容易控制。
当然有些轮速传感器放在电动车前轮变速器,具有实施过程时间延迟的不足,这势必对策略调整过程的过程控制产生很大冲击。
3.直接转矩控制(DTC)直接转矩控制是一种相对较新的控制策略,它可以实现对异步电机转矩和转速的直接控制,而无需通过传统的电流环和速度环。
DTC可以实现电机的快速动态响应和高精度转矩跟踪。
它基于对电机状态向量的直接控制,可以对电机的电流、转速和转矩进行精确的控制。
4.感应电机-电动车逆时针控制感应电动机-电动车逆时针电流控制技术是一种通过控制逆变器电流分量,实现电右旋转矩调整的技术。
采用较高的功率因数界定机构,不仅以自适应结构识别器,良好的参数解偏技术精确的输出到逆变器,确保逆变器具有正常输出。
5.空间矢量调制(SVPWM)空间矢量调制是一种逆变器控制技术,可以实现对直流电源的逆变,从而控制异步电机的转速和转矩。
SVPWM可以使逆变器输出的电压和电流更加平滑,从而提高电机的效率和控制精度。
它可以通过在不同的空间矢量区域中改变逆变器的输出电压和频率来实现。
在实际应用中,根据系统要求和性能需求,可以选择合适的异步电机控制策略。
不同的控制策略有不同的优点和适用范围,可以根据具体情况选择最合适的控制方案。
同时,随着电机控制技术的不断发展,未来可能会出现更多新的异步电机控制策略,以满足不断变化的应用需求。
三相异步电动机连续控制电路原理

一、概述三相异步电动机是工业生产中常用的一种电动机,它具有结构简单、可靠性高、效率高等优点,在很多领域都有广泛的应用。
而对于三相异步电动机的控制,连续控制电路是一种常见的控制方法,它通过对电动机的供电电压进行调节,实现对电动机转速的连续控制,是一种有效的控制手段。
本文将介绍三相异步电动机连续控制电路的原理,包括其基本原理、实现方式和应用。
二、三相异步电动机基本原理1. 三相异步电动机的结构和工作原理三相异步电动机是一种感应电动机,由定子和转子组成。
当通过定子绕组通入三相交流电时,会在定子绕组中产生一个旋转磁场。
转子由感应电动机的工作原理可知,在这旋转磁场的作用下,转子内也会产生感应电动势,从而使转子产生转动运动。
通过控制定子绕组中的电流或转子上的电流,可以实现对三相异步电动机的控制。
2. 三相异步电动机的控制原理三相异步电动机的控制原理主要是通过改变电动机的供电电压和频率来实现。
其中,改变电动机的供电电压可以实现对电动机转矩和转速的控制;而改变电动机的供电频率,则可以实现对电动机转速的控制。
在连续控制电路中,通常采用改变电动机的供电电压来进行控制。
三、三相异步电动机连续控制电路原理1. 连续控制电路的基本结构连续控制电路的基本结构包括电源模块、控制模块和输出模块。
电源模块负责将输入的交流电转换为可供电动机使用的直流电;控制模块负责对输出电压进行调节,实现对电动机的控制;输出模块将调节后的电压提供给电动机使用。
2. 连续控制电路的工作原理连续控制电路通过控制控制模块中的电路来改变输出电压,从而实现对电动机的控制。
一般来说,控制模块中会采用脉宽调制(PWM)或者调压变压器来实现对输出电压的调节。
通过改变控制模块中的控制信号,可以精确地调节输出电压,从而实现对电动机转速的连续控制。
四、三相异步电动机连续控制电路的实现方式1. 脉宽调制(PWM)控制方式脉宽调制是一种常用的连续控制方式,它通过改变输出脉冲的宽度来实现对输出电压的调节。
低开关频率下永磁电机控制方法研究的开题报告
低开关频率下永磁电机控制方法研究的开题报告一、研究背景及意义永磁电机因具有高效、高速、高性能、体积小、重量轻等优点,被广泛应用于各领域,例如机器人、电动车、医疗仪器等。
然而,在低开关频率下控制永磁电机时,由于输出电压波形质量不高,会产生较大的功率损耗和振荡,甚至可能导致电机失速,降低了永磁电机的性能,不利于实际应用。
因此,研究低开关频率下永磁电机的控制方法,提高其运行效率和运行质量,将具有实际应用的重要意义。
二、研究内容及方法本研究旨在探讨低开关频率下永磁电机的控制方法,研究内容包括以下方面:1. 分析低开关频率下永磁电机的工作特性和控制方法的现状,对比各种控制方法的优缺点。
2. 基于磁链反馈控制原理,设计低开关频率下永磁电机的控制系统模型,并选取合适的控制算法。
3. 构建实验平台,进行实验验证,对比不同控制策略的控制效果和性能指标(如功率因数、效率、波形失真度等)。
本研究将主要采用电工理论、控制系统理论和实验研究相结合的方法,包括基础理论分析、数值模拟、仿真验证、实验研究等。
三、研究进展及工作计划目前已完成的工作主要包括对低开关频率下永磁电机的现状和特点进行分析研究,并对磁链反馈控制原理进行了深入了解。
下一步的工作计划如下:1. 设计永磁电机的控制系统模型,并选取合适的控制算法。
2. 参考相关文献和先前研究经验,进行数值模拟和仿真验证,对比不同控制方法的控制效果和性能指标。
3. 构建实验平台,搭建低开关频率下永磁电机的控制系统,并进行实验研究。
4. 对实验结果进行分析、总结和归纳,提出可持续改进控制策略的建议。
四、预期研究结果及意义通过本研究的努力,我们预期可以得到以下研究结果:1. 设计出可实现低开关频率下永磁电机控制的系统模型和合适的控制算法。
2. 通过数值模拟和仿真验证,对比不同控制方法的控制效果和性能指标,确定最佳的控制方法。
3. 在实验平台上进行实验研究,验证所得控制方法的可行性和可靠性。
三相双速异步电动机控制电路
三相双速异步电动机控制电路————————————————————————————————作者:————————————————————————————————日期:一、双速电机控制原理调速原理根据三相异步电动机的转速公式:n1=60f/p三相异步电动机要实现调速有多种方法,如采用变频调速(YVP变频调速电机配合变频器使用),改变励磁电流调速(使用YCT电磁调速电机配合控制器使用,可实现无极调速),也可通过改变电动机变极调速,即是通过改变定子绕组的连接方法达到改变定子旋转磁场磁极对数,从而改变电动机的转速。
根据公式;n1=60f/p可知异步电动机的同步转速与磁极对数成反比,磁极对数增加一倍,同步转速n1下降至原转速的一半,电动机额定转速n也将下降近似一半,所以改变磁极对数可以达到改变电动机转速的目的(这也是常见的2极电机同步转速为3000rpm,4极电机同步转速1500rpm,6极电机同步转速1000rpm等)。
这种调速方法是有级的,不能平滑调速,而且只适用于鼠笼式电动机,这就是双速电机的调速原理。
下图介绍的是最常见的单绕组双速电动机,转速比等于磁极倍数比,如2极/4极、4级/8极,从定子绕组△接法变为YY接法,磁极对数从p=2变为p=1。
∴转速比=2/1=2双速电机的变速原理是:电机的变速采用改变绕组的连接方式,也就是说用改变电机旋转磁场的磁极对数来改变它的转速。
如你单位的双速电机(风机),平时转速低,有时风机就高速转,主要是通过外部控制线路的切换来改变电机线圈的绕组连接方式来实现。
1、在定子槽内嵌有两个不同极对数的共有绕组,通过外部控制线路的切换来改变电机定子绕组的接法来实现变更磁极对数;2、在定子槽内嵌有两个不同极对数的独立绕组;3、在定子槽内嵌有两个不同极对数的独立绕组,而且每个绕组又可以有不同的联接。
(一)双速电机定子接线图三相双速异步电动机的定子绕组有两种接法:△接和YY接法,如下图所示。
轨道交通异步牵引电机低开关频率下定子磁链轨迹跟踪控制研究
第39卷第4期 铁 道学报Vol. 39 No. 4 2 0 1 7 年 4 月JOURNAL OF TH E CHINA RAILWAY SOCIETY April 2017文章编号:1001-8360(2017)04-0001-08轨道交通异步牵引电机低开关频率下定子磁链轨迹跟踪控制研究刘可安〃,田红旗、尚敬2,刘勇2,梅文庆2(1.中南大学交通运输工程学院,湖南长沙410075; 2.中车株洲电力机车研究所,湖南株洲412001)摘要:功率器件的低开关频率导致轨道交通牵引系统在全速范围内不能实现圆形定子磁链轨迹控制。
直接自控制(DSC)广泛应用于轨道交通牵引传动控制,其定子磁链轨迹为六边形或十八边形,但随着逆变器最大输出电压越来越接近电机额定电压,未能实现对转矩的有效控制,产生较大的电流冲击和转矩脉动,影响系统控制性肯旨。
为解决此问题,本文基于优化脉宽调制策略,以异步牵引电机为控制对象将定子磁链轨迹跟踪控制算法应用于高速区,与应用于中低速区的DSC控制算法进行无缝切换,实现全速范围内的平滑过渡。
仿真及实验证明了所提算法的正确性和可行性。
关键词:轨道交通;低开关频率;异步牵引电机;优化脉宽调制;定子磁链轨迹跟踪控制中图分类号:TM343 文献标志码:A doi:10. 3969/j. issn. 1001-8360. 2017. 04. 001Stator Flux Tracking Control of Induction Traction Motor at LowSwitching Frequency for Rail TransmitL I U Kean1,2,T I A N Hongqi1,S H A N G Jing2,L I U Y〇ng2,M E I Wenqing2(1. School of Traffic and Transportation. Engineerings Central South University»Changsha 410075 »China;2. CRRC Zhuzhou Institute of Electric Locomotive, Zhuzhou 412001» China)Abstract:With the low switching frequency of power devices,the circular trajectory control of stator flux in the r a i l transit traction system can not be achieved in the whole speed range.Direct self control,proposed by professor M.Depenbrock,has been widely used in traction control of r a i l transit.The trajectory of stator flux i s hexagonal or eighteen-corner.But when the approach of the m a x i m u m output voltage of the inverter to the rated voltage of the motor fails to achieve effective control of the torque,greater current shock and torque ripple will be caused,thereby affecting the control performance of the system.In order to resolve this problem,stator flux tracking control was proposed in this paper to control the induction traction motor based on optimal P W M. The method was applied to high speed range while the D S C was used in low and medium speed range.The simulation and experiment results showed the correctness and feasibility of the proposed algorithm.Key words:r a i l transmit;low switching frequency;induction traction motor;optimal P W M;stator flux tracking control在承载着运输重任的轨道交通牵引传动领域,交 流传动已经基本取代直流传动成为应用主流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第34卷第21期中国电机工程学报V ol.34 No.21 Jul.25, 2014 3456 2014年7月25日Proceedings of the CSEE ©2014 Chin.Soc.for Elec.Eng. DOI:10.13334/j.0258-8013.pcsee.2014.21.008 文章编号:0258-8013 (2014) 21-3456-11 中图分类号:TM 341低开关频率下异步电机电流环的数字控制赵雷廷,刁利军,张哲,刘志刚(北京交通大学电气工程学院,北京市海淀区 100044)Discrete-time Current Controller for Induction Motors at Low Switching FrequencyZHAO Leiting, DIAO Lijun, ZHANG Zhe, LIU Zhigang(School of Electrical Engineering, Beijing Jiaotong University, Haidian District, Beijing 100044, China)ABSTRACT: Discrete-time current controller plays an important role in vector control of induction motors, which affects the decoupling effect of motor torque and flux, output torque response and even the stability of converter-motor system. However, in high power AC drive system, the traction converter often operates at low switching frequency to reduce the dynamic losses of the power devices, which leads to large digital control delay, enhancing the induction motor dq axis current cross coupling. In order to overcome the problem,this paper provided a comprehensive analysis of the induction motor coupling factors. Then using the principle of zero-pole cancellation, an improved discrete current controller was proposed, which not only ensures excellent dynamic performance but also cancels cross coupling between the torque component and flux component of stator current in the discrete-time domain. The results of model simulation and experiment prove the validity and feasibility of improved discrete current controller.KEY WORDS: induction motor; discrete-time current controller; digital control delay; zero-pole cancellation; current controller摘要:电流环数字控制在异步电机矢量控制系统中占有非常重要的地位,其性能的优劣直接影响电机转矩与磁链解耦控制效果、输出转矩响应速度,甚至牵引变流器–异步电机系统稳定性。
而在大功率传动系统中,为降低开关器件损耗,牵引变流器开关频率通常较低,从而产生较大数字控制延时,加剧电机定子电流励磁分量与转矩分量之间的耦合程度。
为解决上述问题,文章全面分析异步电机耦合因素,结合零极点对消原理提出一种改进型离散电流控制器,在离散基金项目:国家自然科学基金项目(U1134204);“十二五”国家科技支撑计划重大项目(2011BAG01B05);北京市交通行业科技项目(2012kj-030x)。
Project Supported by National Natural Science Foundation of China (U1134204); Key Project of the National “Twelfth-Five Year” Research Program of China (2011BAG01B05); The Transportation Industry Science and Technology Project of Beijing (2012kj-030x). 时间域下,不仅确保电流环系统具有良好的动态响应,而且可以实现定子电流转矩分量与励磁分量的有效解耦。
模型仿真与实验验证了改进型离散电流控制器的有效性与可行性。
关键词:异步电机;电流环数字控制;数字控制延时;零极点对消;电流控制器0 引言异步电机是一个高阶、非线性、强耦合系统,通常采用旋转坐标变换将定子电流分解为相互垂直、互不影响的励磁分量(d轴电流)和转矩分量(q 轴电流),通过对两者进行独立闭环调节,实现电机磁链与转矩的解耦控制。
然而由于异步电机自身存在定、转子之间耦合效应,以及旋转坐标变换引入的附加交叉耦合因子,从而使定子电流两个分量间存在严重耦合[1],同时,在大功率牵引传动系统中,为降低器件的开关损耗,牵引变流器通常选用较低的开关频率,这使得电流环带宽受限、系统动态响应能力下降,且由此产生较大的数字控制延时将进一步加剧电流耦合程度[2-5]。
为解决电流环系统d、q轴电流耦合问题,需要合理的设计电流环控制策略。
然而,常规的前馈解耦电流控制器忽略了数字控制延时以及异步电机转子侧对定子侧的耦合影响,其在牵引变流器低开关频率工况下,尤其当电机运行至中高速区段后,解耦效果极差[6-7]。
而目前绝大部分新型电流控制器都是基于连续时间域设计的[8-14],且多数应用于开关频率较高的工业场合,针对低开关频率工况下的离散时间域电流控制器研究的文献还相对较少。
文献[15]着重分析了数字控制延时的产生来源,通过改进电流环控制时序,采用相位超前补偿策略,从而减小数字控制延时所带来的不利影响,但其并没有从本质上解决异步电机耦合问题。
文献[16]第21期 赵雷廷等:低开关频率下异步电机电流环的数字控制 3457针对异步电机交叉耦合因子以及数字延时影响提出了一种基于复矢量的电流环数字控制方法,但其忽略了电机自身转子侧对定子侧的影响因素,因此随电机转速的逐渐增加,其解耦效果将逐渐降低。
文献[17]则直接在离散时间域下设计了带有数字延时补偿策略的离散电流控制器,虽然在电机运行全速范围内解耦效果显著,但控制器结构十分复杂,数字实现计算量大,并不适用于实际工程应用。
本文将利用复矢量概念建立异步电机精确等效模型,全面总结其内在所有耦合因素;通过分析现有的电流环控制时序,指出数字控制延时产生的来源及其对电流环系统解耦控制的不利影响;其次,定义了系统耦合度函数,分析常规前馈解耦电流控制器在面临异步电机自身耦合及数字延时等不利影响时的解耦效果;最后,采用模拟化方法的设计思路,在连续时间域下设计了一种适用于异步电机运行全速度范围,且综合考虑所有耦合因素及数字延时补偿的改进型电流控制器模型,根据控制性能要求选择了合适的控制器结构,按照零极点分布规律及频域分析等经典理论,完成了控制器参数的设计,通过对比分析不同离散化方法在实际应用中对电流环系统解耦效果的影响,选择合理的离散化方法最终完成数字实现。
1 异步电机解耦控制现存问题分析1.1 电机内部定转子耦合及旋转坐标变换交叉耦合分析本文选取电机定子电流i s 和转子磁链ϕr 作为状态变量,定子电压u s 作为输入,在同步旋转坐标系下,建立基于复矢量的异步电机精确模型为s r σs e σs r r r s r σσd 1j (j 1)d i k i i u t R R τωτωτϕτ′′+=−−−+ (1) rrr slip r r m s d j d L i tϕτϕωτϕ+=−+ (2) e r r s r e L32d 1d T pk i J T T p tϕω⎧=×⎪⎪⎨⎪=−⎪⎩ (3) 式中:τ′σ =σL s /R σ、τr =L r /R r 分别为等效电机定子瞬态时间常数和电机转子时间常数;R σ=R s +k 2r R r 为定子等效电阻;R s 、R r 分别为定子电阻与转子电阻;k r =L m /L r 为转子磁耦合因子;σ=1−L 2m /(L s L r )为漏磁系数;L m 、L r 、L s 分别为磁化电感、转子电感、定子电感;T e 、T L 分别为电机输出转矩及负载转矩;J为电机转子惯量;p 为电机极对数;ωe 、ωr 、ωslip 分别为电机同步频率、转子频率以及转差频率。
根据式(1)—(3),可以获得异步电机信号流图如图1所示。
图1 异步电机信号流图Fig. 1 Signal flow of the induction machine由图1可知,在异步电机转子侧内部反馈环上存在耦合因子−j τr ωslip ϕr ,由于电机转子时间常数τr 远大于等效定子时间常数τ′σ,且转差频率ωslip 在电机运行的全速度范围之内自身变化范围及数值均较小,因此,该耦合对电机动态响应的影响一般可忽略不计。
在异步电机定子侧内部反馈环上,存在由于旋转坐标变换而产生的交叉耦合项−j τ′σωe i s ,其与同步频率ωe 成正比,因此,在电机运行中高速区段造成的电流耦合效应较明显。
电机转子与定子之间的耦合反映在转子感应电压e r =(j τr ωr −1)ϕr 上,由于存在较大的转子时间常数τr ,因此,在电机运行低速区段时,电机定、转子之间耦合对电机动态响应的影响亦可忽略不计。
根据转子感应电压表达式可以看出,耦合的影响程度主要取决于虚部j τr ωr ϕr 的大小,其与电机转子频率ωr 成正比,因此,随着电机转速的逐渐增加,当电机运行至中高速区段时,将会为电机动态响应带来一定程度的不利影响。