基于DSP与FPGA的跟踪伺服运动控制器设计
基于DSP+FPGA的开放式机器人运动控制器的研究共3篇
基于DSP+FPGA的开放式机器人运动控制器的研究共3篇基于DSP+FPGA的开放式机器人运动控制器的研究1开放式机器人运动控制器是一种专为机器人运动控制而设计的控制器,其运行在数字信号处理器(DSP)和现场可编程门阵列(FPGA)之上。
这种控制器的目的是完整控制机器人的运动,并提供精细的数据采集和处理,从而可以在进行复杂的运动控制时快速而准确地响应外界的刺激。
DSP+FPGA控制器的设计与传统机器人控制器类似,但是一些核心的结构和特征有所改变。
在DSP+FPGA控制器中,DSP主要用于实现运动控制算法、信号处理和通信控制,而FPGA则用于实现实时IO接口的数据采集及处理。
由于DSP的高效性能和FPGA的高速IO,因此该控制器可以在实时性和精度方面取得更高效的控制效果。
在DSP+FPGA控制器的设计中,需要深入了解机器人的运动学和动力学。
运动学涉及机器人的轨迹和位置控制,而动力学则涉及机器人的力学和电气特性的精确计算和控制。
因此,开发者需要掌握基本的控制算法、数学模型和信号处理技术,才能更好地设计出适应不同机器人类型和应用场景的开放式机器人控制器。
在实现DSP+FPGA开放式机器人运动控制器的过程中,需要注意以下几点:1. 高速数据采集和处理:FPGA作为实时IO接口向DSP提供高速而可靠的数据(例如机器人的位置、偏差、角度和力量数据)。
2. 快速响应和反应能力:DSP负责处理数据和运动控制算法,并通过FPGA控制机器人的开关、电机和伺服系统。
3. 多通道数据处理:DSP和FPGA需要支持多通道数据采集和处理,以实现同步的运动控制和精密的位置控制。
4. 丰富的输入和输出功能:DSP+FPGA控制器需要支持多种IO接口,例如模拟量输入、数字量输入、PWM控制、编码器反馈等,以实现对机器人的全面控制。
5. 跨平台的可移植性:DSP+FPGA控制器需要支持不同操作系统和平台,以适应各种机器人应用场景的需求。
一种基于DSP+FPGA的目标跟踪系统设计
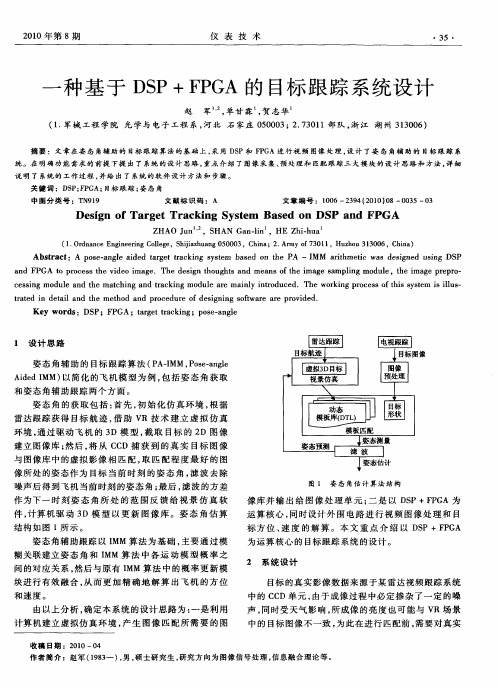
雷达 跟踪 获得 目标 航 迹 , 助 V 技术 建 立 虚 拟仿 真 借 R
环境 , 过驱动 飞 机 的 3 通 D模 型 , 取 目标 的 2 图像 截 D 建立 图像 库 ; 后 , 从 C D捕 获 到 的 真 实 目标 图像 然 将 C
与 图像库 中的虚拟 影像 相 匹 配 , 匹配 程 度 最 好 的 图 取
为运 算 核心 的 目标 跟踪 系统 的设 计 。 2 系统 设计
姿态 角辅助 跟踪 以 I 算 法 为基 础 , MM 主要 通 过模 糊关 联建立 姿 态 角 和 I 算 法 中各运 动模 型 概 率 之 MM 间 的对应 关系 , 然后 与原 有 I 算 法 中 的概 率更 新模 MM 块进行 有效 融合 , 而 更 加 精确 地 解 算 出飞 机 的 方位 从
21 0 0年第 8期
仪 表 技 术
・ 5・ 3
一
种 基 于 D P+F G 的 目标 跟 踪 系 统 设 计 S PA
赵 军 , 单甘 霖 贺 志华 ,
(. 1 军械 工程 学院 光 学与 电子 工程 系 , 北 石 家庄 0 0 0 ; .3 1 部 队 , 江 湖 州 3 3 0 ) 河 5 03 270 1 浙 1 0 6
tae n d ti a d t e m eh d a d prc d r fd sg i g s f r r o i e r td i ea l n h t o n o e u e o e in n o t e a e pr vd d. wa
K e o ds:DS yw r P; F PGA ;t r e r c i a g tta kng;p s — n l o e a ge
结构 如 图 1所示 。
基于DSP和FPGA的转台控制器的设计实现
a c r c f t r i g a g e i . 1 i h i e r i c e sn rd c e sn t l f u p ti g p le c u a y o u nn n l s0 O n t e l a n r a i g o e r a ig s y e o t u tn u s . n o Ke wo d :s e - t r h r c e it so lc r ma n tc s a trn ; DS y r s t p mo o ;c a a t rs i fe e t o g e i c te i g c P
线性启 动或停止 的方式 可以使转 动角度 的精度满 足 0 0 度的要求 。 .1
关 键 词 :步 进 电机 ; 电磁 散 射 特 性 ;D P S 中 图分 类 号 :TN l. 5 文 献 标 识 码 :A 912
De i n o u n a l o r le a e n DSP a sg ft r t b ec nto lr b s d o nd FPGA
d vc n o u e . Th e t g r s l s o h t t e c n r l r c n a h e e v ro s t s i g r q ie n n h e ie a d c mp t r e t s i e u t h ws t a h o t o l a c iv a i u e t e u r me t a d t e n e n
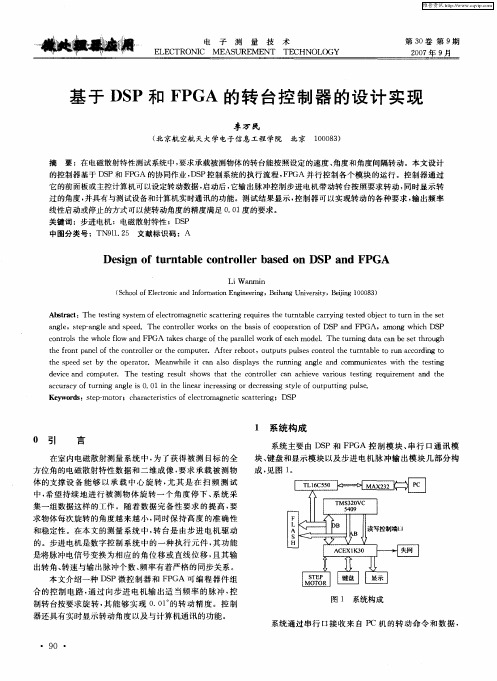
1 系统 构 成 0 引 言
系统 主要 由 DS P和 F GA控 制模 块 、 P 串行 口通 讯 模
在室 内电磁 散射测 量 系统 中 , 了获得 被 测 目标 的全 为
块 、 盘和 显示模 块 以及步 进 电机 脉 冲输 出模块 几 部分 构 键
一种基于DSP和FPGA的自适应模版匹配跟踪系统设计
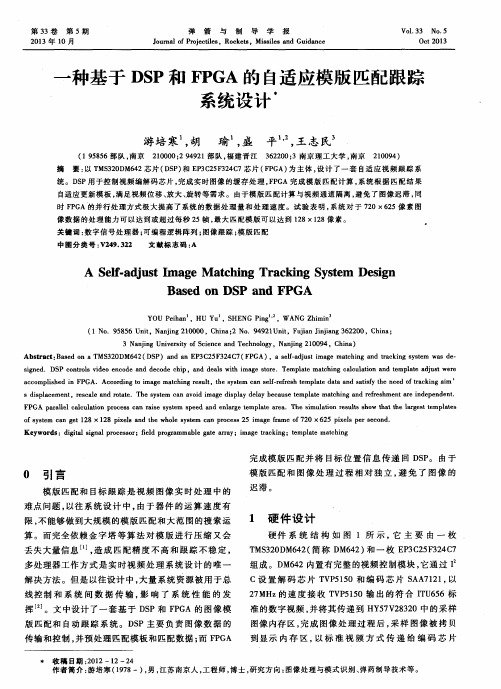
s d i s p l a c e me n t ,r e s c a l e a n d r o t a t e .T h e s y s t e m c a n a v o i d i ma g e d i s p l a y d e l a y b e c a u s e t e mp l a t e ma t c h i n g a n d r e f r e s h me n t a r e i n d e p e n d e n t .
F PGA pa r a l l e l c a l c ul a t i o n p r o ce s s c a n r a i s e s y s t e m s pe e d a nd e n l a r g e t e mp l a t e a r e a .The s i mu l a t i o n r e s ul t s s ho w t ha t t he l a r g e s t t e mp l a t e s
s i g n e d .DS P c o n t r o l s v i d e o e n c o d e a n d d e c o d e c h i p,a n d d e a l s wi t h i ma g e s t o r e .T e mp l a t e ma t c h i n g c lc a u l a t i o n a n d t e mp l a t e a d j u s t we r e
a c c o mpl i s h e d i n F PGA. Ac c o r di ng t o i ma g e ma t c hi ng r e s u l t ,t h e s y s t e m c a n s e l f — r e f r e s h t e mp l a t e da t a a nd s a t i s f y t he ne e d o f t r a c k i ng a i m’
基于DSP和FPGA的运动控制器设计
S n Ya m ig,W a g Yo g n u n n n n mi g,Yu n De h ,Ch n Jn g a g a zi e i g u n ,Z a g Pe g h n n ,W a g Ya n n
( a gc u sa c n tt t o eh n c lS in eCo ,Lt Ch n h nRee r h I siu ef rM c a ia ce c . d.Ch n h n 1 0 1 a gc u 3 0 2,Jii ln,Ch n ia)
V 15 O 3 o. 2N .
工 程 与试 验 E NGI E R NG & T S N E I ET
Sp 0 2 e.2 1
基 于 DS P和 F GA 的 运 动 控 制 器 设 计 P
孙艳 明 , 永 明 , 德 志 , 王 袁 陈景 光 , 张 鹏 , 王 艳
( 长春机 械科 学研 究院有 限公 司 , 吉林 长春 1 0 1 ) 3 0 2
The f c i ft o r l ri x nd d b un ton o he c ntole s e pa e y FPGA ,t n,t l e o p c t o fs v r lAC he he cos d l o on r lo e e a s r o m o o lc r — yd a i e vo v l e i e lz d The c t o l ri e a e he e o rsg e v t rore e t o h r ulcs r a v s r a ie . on r le nt gr t s t nc de i — n la q ston,PLC nt r a e,1 t g s e a c uiii i ef c bishi h— pe d AD o l c i n a d c 6 c le to n ompu e o t rc mmun c to n iain i— t r a e,a h o r le a gh i e a i n a a c l to pe d. efc nd t e c nt o l r h s hi nt gr to nd c l u a i n s e Ke wo d DS y r s: P;FPGA ;Re i t r;Ve io DL gs e rl g H
基于DSP和FPGA的数控系统运动控制的设计
关 键词 DS P P F GA 步 进 电机 伺 服 系统
0 引 言
运 动 控制 是 数 控 系 统 的重 要 组 成 部 分 ,数 控 系 统 的性 能 很 大程 度 上 取 决 于 运 动 控 制 器 的 选 择 。DS P器
上 的 多轴 运动 控 制 卡 大 多 采 用 多 个 DS P控 制 多 轴 联 动
和 DS P负 责 复 杂运 算 ,结 合 扩展 的 ]o或 D/ 通 道去 / A 控制 多 轴 联 动 。 全 部 数 控 系 统 的 功 能 都 集 中在 一 块 运 动控 制 卡 中 , 维 护 困 难 , 也 不 能 满 足 不 同 用 户 的 需
件 的 升 级 维 护 容 易 ,开 放 性 进 一 步 提 高 。
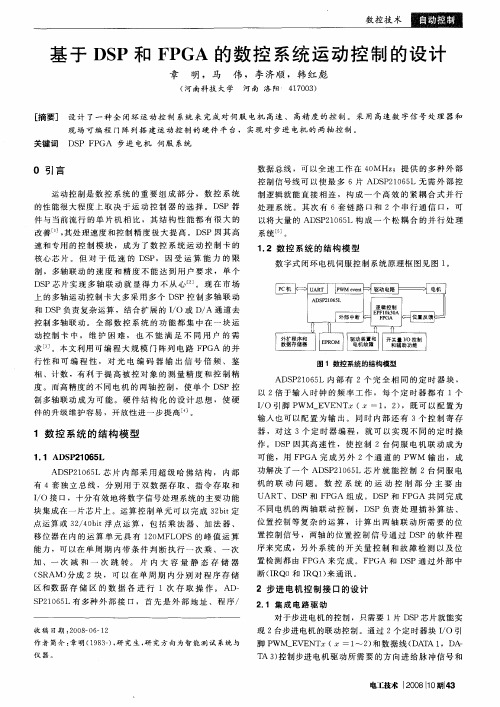
图 1 数控系统的结构模型
ADS 2 0 5 内部 有 2个 完 全 相 同 的定 时 器 块 , P 16 L 以 2倍 于输 入 时 钟 的 频 率 工 作 , 每个 定 时 器 都 有 1个
I0 引脚 P M— VE x ( 一 1 ) / W E NT ,2 ,既 可 以 配 置 为
求 ] 。本 文 利 用 可 编 程 大 规 模 门 阵列 电 路 F G 的 并 PA 行 性 和 可 编 程 性 ,对 光 电 编 码 器 输 出 信 号 倍 频 、 鉴 相 、计 数 ,有 利 于提 高 被 控 对 象 的 测 量 精 度 和 控 制 精 度 。而 高 精度 的 不 同 电 机 的 两 轴 控 制 ,使 单 个 DS P控 制 多 轴 联 动 成 为 可 能 。硬 件 结 构 化 的设 计 思 想 , 使 硬
基于DSP+FPGA的交流伺服驱动器设计
3 功率因数等于 1 ) 的控制;4 恒磁链控制 J () 。功 率 因数等于 1和恒磁链的电流控制方法 , 电动 i 』其
机 输 出力矩 都受 到 了限制 , 一般 不考虑 采用 。
一
流伺服 驱动 系统 , 满 足 雷 达 对 成本。
( aj gR sac ntueo lc ois eh ooy N nig2 0 1 , hn ) N ni eerhIs tt f et nc cn l , aj 10 3 C ia n i E r T g n
Ab t a t A f l d gt l ev rv rfrt e mo e n r d re u p n sd sg e . g l tg ae lcr n c c mp ・ s r c : ul ii r o d e h d r a a q ime t - as i o wa e i n d Hih y i e r td ee t i o o n o
0 引 言
随着 电力 电子技术和现代控制理论的发展 , 以 永 磁 同步 电动 机为 执行 元件 的全 数字 交 流伺服 驱动 系统 , 其性能 已和直流伺服系统相当, 而交流电机的 环境适应能力和低维护成本则成为取代直流伺服的 最大优势。本文研究 目的就是为现代雷达装备提供 种高可靠性的交流伺服驱动装置 , 取代 传统 的直
基于DSP-FPGA的多轴运动控制系统设计
式 中L 为弹 目距 离初值 ,v 弹 目接近 速 度 ,t n 为
为工 作时 间 。
步 变 速 控 制 , 以及 两 个 干 扰 投 放 电机 间 的 同步 控 制 ,并 且 完成 了对 它们 的精 确 定位 。系统 中对DS P 和F G P A进 行 了功能 划 分 ,在硬 件 上 实现 了对 多路
31 同步变速算法 . 可 变 光 阑 电机 在 有 效 工 作 时 间 内运 行 轨 迹 为 不 规 则 的 ,所 以采 用 多份 匀速 运 动 来拟 合 变 速 运
动 。 当弹 目接近 速 度 为v ,可变 光 阑 电机 从 闭合 时 运 行到 最大 尺 寸 时( 模拟 目标 从 初 始位 置 到 终点 ) 即 的 工 作 时 问为 t 设 每 份 匀 速 运动 时 间为 T 与 系 (
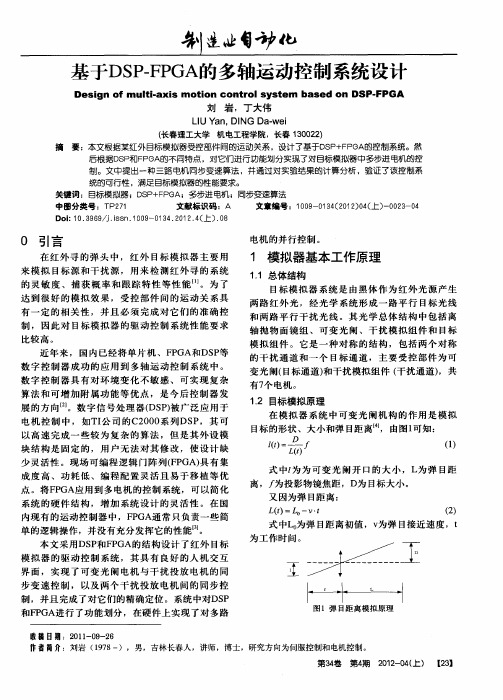
目标 模 拟 器 系统 是 由黑 体 作 为 红 外 光 源 产 生 两 路 红 外 光 , 经 光 学 系 统形 成 一 路平 行 目标 光线 和 两 路 平 行干 扰 光 线 。其 光 学 总体 结构 中包 括 离 轴 抛 物 面 镜 组 、 可 变 光 阑 、干 扰模 拟 组 件 和 目标 模 拟 组 件 。它 是 一 种 对称 的 结 构 , 包括 两 个 对 称 的 干 扰通 道 和一 个 目标通 道 , 主要 受控 部 件 为可 变 光 阑( 目标通 道) 干扰 模 拟组 件 ( 和 干扰 通道 ) ,共
数 字 控 制 器 具 有对 环 境 变 化 不 敏 感 、可 实 现 复 杂
算 法 和 可 增 加 附 属功 能 等 优 点 ,是 今 后 控 制 器 发 展 的方 引 。数 字 信 号 处理 器 ( P 被 广 泛 应 用 于 DS ) 电机 控 制 中 , ̄ T 公 司 的C2 0 系 列DS / I I 00 P,其 可 以高 速 完成 一 些较 为 复杂 的 算法 ,但 是 其 外 设 模
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP与FPGA的跟踪伺服运动控制器设计
摘要:在分析光电跟踪伺服系统特点的基础上,以TI 公司DSP 芯片TMS320F2812 作为主控制芯片,采用FPGA 进行逻辑时序控制,设计了基于DSP 和FPGA 的多轴伺服运动控制器。
给出了该控制器的功能和硬件结构以及软件流程设计。
实验结果表明,该控制器具有高集成度、灵活性、实时性、
模块化的特点,完全满足了在复杂环境下对伺服系统控制的要求。
在高速光电跟踪系统中,对伺服系统的高速性、精确度和稳定性都有很
高的要求。
为了提高跟踪精度,越来越多的控制算法被应用于伺服系统中,因
此要求控制器能在很短的时间内完成大量的运算[1]。
DSP 具有较强的运算能力,而FPGA 具有高度灵活的可配置性和逻辑时序控制能力[2]。
因此在很多伺服控制器中,“DSP+FPGA”结构得到了广泛的应用。
实际应用环境一般比较复杂,有大量的信息传递,并且需要对电机转速
实行精确控制,因此对伺服控制器的多路通信能力,快速运算能力和抗干扰能
力都有较高的要求。
为了解决这一问题,提供一个较好的实验平台,本文结合
光电跟踪伺服系统的特点,提出一种以TI 公司的32 位定点数字信号处理器TMS320F2812 为核心,以Altera 公司CycloneⅡ系列FPGA 为辅助处理器结构的跟踪伺服控制器,并综合阐述了该控制器的功能、硬件设计和软件流程。
该
控制器采用单+5 V 供电,具有6 路模拟信号输入、4 路模拟信号输出、多路PWM 输出、1 路CAN 总线、2 路RS422 和1 路RS232 串行通信口,具有较强的运算能力和数据通信能力,是良好的数字控制系统实验平台。
1 总体结构设计
TMS320F2812 作为一款专为电机控制所设计的芯片,不仅具有运算速度快的特点,而且集成了丰富的片内外设资源[3]。
设计时综合考虑DSP 片上资。