基于MATLAB的连杆机构运动综合
基于matlab的四杆机构运动分析
基于matlab的四杆机构运动分析一、四杆机构基本概念四杆机构是一种通过变换连杆长度,改变机构运动形态的机械系统。
四杆机构通常由固定连杆、推动连杆、连接杆和工作连杆四个连杆组成,其中固定连杆和推动连杆固定不动,连接杆和工作连杆则沿固定轴线的方向做平动或旋转运动。
四杆机构的基本构造如下图所示:四杆机构的四个连杆的长度和构造参数,以及驱动机构的运动决定了机构的运动特性。
在进行四杆机构运动分析时,需要通过求解运动学关系式和动力学方程,得到连杆的运动规律和力学特性。
二、四杆机构运动学分析1.运动学基本方程四杆机构的运动学分析基本方程是连杆长度变化的定理,即:l₁²+l₂²-2l₁l₂cosθ₂=l₃²+l₄²-2l₃l₄cosθ₄其中,l₁,l₂分别为固定连杆和推动连杆长度;l₃,l₄分别为连接杆和工作连杆长度;θ₂,θ₄分别为推动连杆和工作连杆的夹角。
2.运动学求解方法根据四杆机构运动学基本方程,可以求解机构中任意连杆的角度和位置,从而分析机构运动规律。
在matlab程序中,运动分析可以采用分析法或图解法。
分析法通常采用向量法或坐标法,即将四杆机构中各连杆和运动副的运动量表示为向量或坐标,然后根据连杆长度变化的定理,求解四个未知角度θ₁、θ₂、θ₃、θ₄。
图解法则先通过画图确定机构的运动规律,在图上求解连杆的角度。
比如可以采用伯格(Bourgeois)图法或恰普利恩(Chaplygin)图法等。
四杆机构动力学分析基本方程包括平衡方程和力平衡方程。
平衡方程:当四杆机构处于平衡状态时,连杆的受力关系可以表示为:ΣF=0其中ΣF为各连杆受力的合力。
ΣF=m×a其中,m为每个连杆的质量,a为连杆的加速度。
四杆机构动力学求解方法以matlab为工具,可借助matlab的求解器完成求解。
具体可以利用matlab的优化工具箱、控制工具箱和系统动态学工具箱等,来实现机构模型的动态模拟、仿真和优化设计。
基于Matlab的机构运动分析教学实践

基于Matlab的机构运动分析教学实践1. 引言机构运动分析是机械设计中的重要环节之一,其研究涉及运动学和动力学等多专业知识。
对于机械工程专业的学生而言,学习机构运动分析并进行相关实践,可有效提高其综合素质和能力,为其未来工作打下坚实基础。
本文主要介绍基于Matlab的机构运动分析教学实践,探讨如何通过实践来巩固和深化相关知识,并为机械专业学生提供一定的参考。
2. 实践内容2.1 实验要求本次实践以单平面机构为例,要求学生使用Matlab软件对其结构和运动学特性进行分析,并绘制相关曲线图。
具体要求包括:1.根据机构结构,计算机构的连杆长度、摆动角度等运动参数。
2.使用Matlab编程,绘制机构的位置分析图和速度分析图。
3.对机构运动学分析结果进行总结,分析机构的运动特性和运动规律。
2.2 实验过程在实践过程中,学生首先需要了解单平面机构的构造和运动规律,掌握机构运动学计算的方法和Matlab编程技能。
接着,学生应根据实验要求设计程序,并输入对应参数,运行程序后绘制各种曲线图。
最后,学生应对实验结果进行总结和分析,深化对机构运动学的理解。
2.3 实验成果对于单平面机构的位置分析图和速度分析图,学生应绘制出各连杆的运动轨迹和速度曲线,并对其进行标注解释。
通过对实验结果的深入分析,学生能够更好地理解机构运动学的基本概念和运动规律,为今后从事与机械设计相关工作打下坚实基础。
3. 实践心得通过本次实践,笔者深刻认识到机构运动分析是机械设计中的重要环节之一,也是机械工程专业核心知识点之一。
学生应尽早掌握基本概念和计算方法,并通过实践来加深对机构运动规律的理解。
Matlab 软件在机构运动分析中具有广泛的应用价值,学生应熟练掌握其编程技能,以更有效地完成实验任务。
4. 结论通过本文的介绍,我们可以了解到基于Matlab的机构运动分析教学实践的相关内容和要求。
学生应通过实践来深化对机构运动学的理解,并为今后从事与机械设计相关工作打下坚实基础。
基于matlab的小型快速压力机多连杆机构运动学分析

3
关于"3与"4的一阶导数和二阶导数运算,通过
MATLAB中的diff函数实现。
连杆4与连杆7的较接点,47的位移方程为:
"47="34+*4COS"4 %47$%34+*4Sin"4
/、 ( 10)
通过一阶求导、二阶求导的速度方程、加速度方
程为:
!"47=="34-*4Sin"4
( 口)
!%47$=%34+*4COS"4 ."47=>"34-*4( Sin"4*COS"4)
/(⑷、
!%78$=%47+*7COS"7
( 15)
.78$>%47+*7( COS"7-Sin"7)
( 16)
3多连杆杆系参数确定
该50kN小型快速伺服压LAB的软件环境,编制用于MATLAB 运动学仿真的M函数,搭建 连杆机构的参数化仿
11
第54卷
锻压装备与制造技术
%14$%34+*41Sin"4
将式(5)与式(2)联立,令 /二"14-rcos"、1二%14-
osin",得到:
• 22+32+*32-*412
”2
2*3!(22+32)
3
/、
⑼
"4=arcSi•n--2--2-+--3- 2+*44112-*332---arc.tan2——
2*4&!(22+32)
文章编号:1672—0121(2019)05—0010—04
基于MATLAB的机构运动学分析
1. Movement analysis on materials flowing through a vertical pipe based on MATLAB2. Modeling and simulation of aircraft movement based on matlab/S-function3. Based on matlab electrically operated windshield wiper systems design method4. Optimum design of integral type steering mechanism based on MATLAB5. Analysis of assistant robotic leg on MATLABIEEE International Conference on Mechatronics and Automation, ICMA 2006Database: Compendex3.3 万方数据库3.3.1 检索式题名或关键词=机构运动与题名或关键词=Matlab 2005-20103.3.2 检索年限2003-20123.3.3 检索结果⑴【名称】基于CFD软件的数字船模平面运动机构实验方法【申请(专利)号】CN200810064057.2【申请人】哈尔滨工程大学.【发明人】张赫,李晔,庞永杰,徐玉如,秦再白,苏玉民,万磊,邹劲.【申请日期】2008-3-3【公告日期】2008-8-20【摘要】本发明提供的是一种基于计算流体动力学CFD软件FLUENT的数字船模平面运动机构实验方法。
包括应用FLUENT前处理软件GAMBIT建立研究对象模型及控制域;在模型表面布置三角形网格,进而在控制域内布置非结构化网格;设定边界条件,加入用户自定义函数UDF文件,引入动网格技术,采用基于完全非结构化网格的有限体积法,实现平面运动机构实验进行的纯横荡运动、纯升沉运动、纯摇首运动、纯俯仰运动和纯横滚运动;对FLUENT得到的力与力矩系数应用科学计算软件MATLAB傅立叶展开,EXCEL最小二乘法拟合,无因次化得到垂直面和水平面的水动力系数以及相关的流体动力分析。
基于matlab的连杆机构设计
基于matlab的连杆机构设计————————————————————————————————作者: ————————————————————————————————日期:目录1平面连杆机构的运动分析 (1)1.2 机构的工作原理 (1)1.3机构的数学模型的建立 (1)1.3.1建立机构的闭环矢量位置方程...................................................11.3.2求解方法.....................................................................22基于MATLAB程序设计 (4)2.1 程序流程图 (4)2.2 M文件编写 (6)2.3程序运行结果输出 (7)3 基于MATLAB图形界面设计 (11)3.1界面设计……………………………………………………………………………………………113.2代码设计……………………………………………………………………………………………124 小结 (17)参考文献 (18)1平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
基于MATLAB的平面五连杆机构的运动学分析_王锡霖

l1 + l2 = l 5 + l3 + l4 l1 = l 5 + l 4 即
l2 - l3 - l4 = - l1 + l5
( 1)
- l4 + l 1 = l5
( 2)
0
l4 sin 4
0
- l4cos 4
0 0 co s 1 sin 1
2
3
=
4
l1
l 1 sin( 1 + 180 ) - l 1 co s( 1 + 180 )
l1 sin 1 - l1cos 1
1. 3 加速度分析 用 1. 2 中得到的角速度方程式再求一次导数, 得:
- l2 sin 2 l2 cos 2 0 0
写成两个坐标方向上的投影式, 得到该机构 的位置方程:
l 2 cos 2 - l3 cos 3 - l 4 cos( 4 + 180 ) = - l 1 cos( 1 + 180 ) + l5 l 2 sin 2 - l3 sin 3 - l4 sin( 4 + 180 ) = - l 1 sin( 1 + 180 )
第3期
王锡霖, 等: 基于 M A T L A B 的平面五连杆机构的运动学分析
275
到非线性方程的雅克比矩阵 J[ 3-4] 。 在 MAT L AB 函数编写中用到了 w hile 条件
循环语句, 编写了名为 rrr posi 的 M 函数, 可以求 解 1. 1 中的位置函数, 再利用 fo r 循环语句得到 随原动件 BF 运动其它构件的位置图像[ 5-8] 。
基于MATLAB的四连杆机构运动分析
Abstract: In or der t o supply SD cards for low end embedded pr oducts, this paper pr esent s a design based on t he A RM 7 pr o cessor S 3C 44B 0X and taking W 86L 388D contr ol chip o f SD card as the co re . In this pa per , the har dw ar e circuit has been designed and the SD car d contr ol agr eement has been analy zed, the cor r esponding soft war e desig n metho d has been g iv en, and the dr iver pr og ra m has been co mpiled . F inally , the v iability of this pr oject has been analy zed thr ough actual testing . Key words: embedded systems; S3C44B0X; SD card; W 86L 388D
Design of SD Card Control System Based on ARM7
ZHANG Yu, ZHANG Yun-sheng, WANG Jian-ping
( Facult y of Inf or mat ion Engin eer ing and A ut omation , Ku nming U niversit y of Science and T echnol og y, K u nming 650051, China)
(完整)基于matlab的四杆机构运动分析

1平面连杆机构的运动分析1。
1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据.机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计.1。
2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b。
组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
1.3 机构的数学模型的建立1。
3。
1建立机构的闭环矢量位置方程在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。
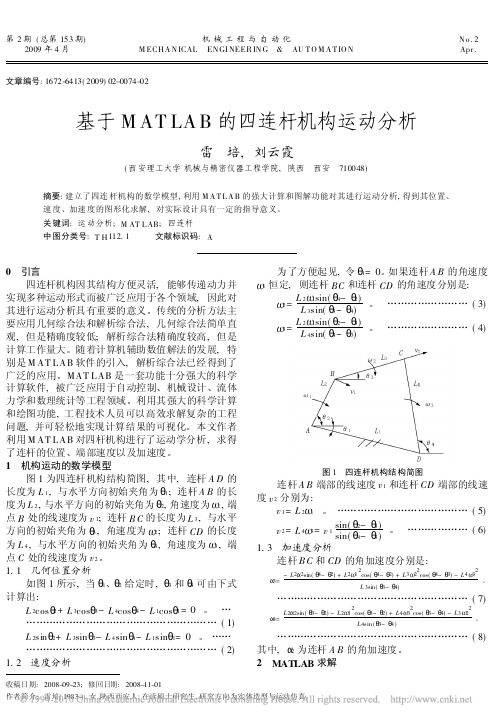
如图1所示,先建立一直角坐标系.设各构件的长度分别为L1 、L2 、L3 、L4 ,其方位角为、、、.以各杆矢量组成一个封闭矢量多边形,即ABCDA。
其个矢量之和必等于零。