ADAMS、MATLAB和AMESim机电液联合仿真介绍及应用
基于Adams与Matlab的汽车电动助力转向系统的联合仿真

基于Adams与Matlab的汽车电动助力转向系统的联合仿真一、本文概述随着汽车工业的快速发展和环保理念的深入人心,电动汽车在全球范围内得到了广泛的关注和研究。
电动助力转向系统(EPS)作为电动汽车的重要组成部分,其性能直接影响到车辆的操控性和安全性。
对电动助力转向系统进行深入研究,优化其设计,提高其性能,对于推动电动汽车的发展具有重要意义。
本文旨在通过Adams与Matlab的联合仿真,对汽车电动助力转向系统进行深入研究。
介绍了电动助力转向系统的基本原理和结构,分析了其在实际应用中的挑战和难点。
详细阐述了Adams和Matlab在电动助力转向系统仿真中的应用,包括模型的建立、仿真参数的设置、仿真结果的获取和分析等。
通过Adams进行机械系统的运动学和动力学仿真,结合Matlab进行控制系统设计和优化,实现了对电动助力转向系统的全面仿真分析。
本文的研究方法结合了仿真模拟和理论分析,旨在通过联合仿真,对电动助力转向系统的性能进行深入挖掘和优化。
通过对比不同参数和设计方案下的仿真结果,本文为电动助力转向系统的设计和优化提供了有价值的参考。
本文的研究不仅有助于加深对电动助力转向系统的理解,也为电动汽车的发展提供了有益的探索和实践。
通过Adams与Matlab的联合仿真,我们可以更加准确地预测和优化电动助力转向系统的性能,为电动汽车的安全性和操控性提供有力保障。
二、汽车电动助力转向系统概述汽车电动助力转向系统(Electric Power Steering,简称EPS)是一种通过电动机提供辅助转向力矩的先进转向系统。
该系统主要由转向传感器、车速传感器、扭矩传感器、电子控制单元(ECU)和助力电机等组成。
EPS系统的核心在于电子控制单元,它可以根据驾驶员的转向意图、车速以及转向力矩等因素,实时计算出所需的辅助转向力矩,并通过助力电机为驾驶员提供适当的助力。
与传统的液压助力转向系统(Hydraulic Power Steering,简称HPS)相比,EPS系统具有诸多优势。
AMEsim与Matlab_simulink联合仿真技术
目录摘要 (1)0 引言 (1)1 联合仿真技术 (2)1.1 联合仿真技术的特点与应用 (2)1.2 联合仿真技术的实现途径 (2)2 联合仿真接口技术 (3)2.1 系统环境配置 (3)2.2 系统编译器配置 (3)3 联合仿真应用举例 (5)4 结论 (8)致谢 (8)参考文献 (9)AMESim与Matlab_Simulink联合仿真技术机械电子系0802班李敏M200870228摘要:根据AMESim与Matlab/Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统的仿真,取得了良好的效果。
关键词:AMESim;Matlab/Simulink;联合仿真;接口Abstract:United Matlab/Simulink technique with AMESim and Matlab/Simulink was discussed based on their own characteristics. The problem of their interface and realization were solved. As an applied example, Matlab/Simulink of electro hydraulic servo-system was shown. Good results were achieved.Keywords:AMESim;Matlab/Simulink;United simulation;Interface0 引言传统的设计方法往往是通过反复的样品试制和试验来分析该系统是否达到设计要求,结果造成大量的人力和物力投入在样品的试制和试验上。
随着计算机仿真技术的发展,在工程系统的软件设计开发中,大量地采用了数值成型的方法,即通过建立系统的数值模型,利用计算机仿真使得大量的产品设计缺陷在物理成型之前就得到了处理,从而可以使企业在最短的时间、以最低的成本将新产品投放到市场。
AMESim和ADAMS联合仿真设置
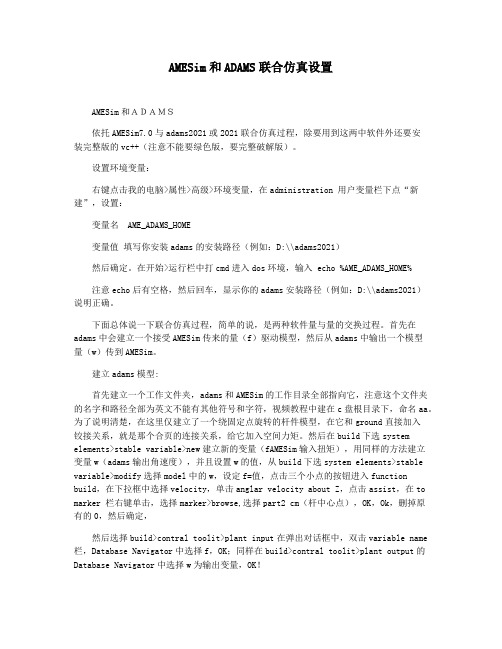
AMESim和ADAMS联合仿真设置AMESim和ADAMS依托AMESim7.0与adams2021或2021联合仿真过程,除要用到这两中软件外还要安装完整版的vc++(注意不能要绿色版,要完整破解版)。
设置环境变量:右键点击我的电脑>属性>高级>环境变量,在administration 用户变量栏下点“新建”,设置:变量名 AME_ADAMS_HOME变量值填写你安装adams的安装路径(例如:D:\\adams2021)然后确定。
在开始>运行栏中打cmd进入dos环境,输入 echo %AME_ADAMS_HOME%注意echo后有空格,然后回车,显示你的adams安装路径(例如:D:\\adams2021)说明正确。
下面总体说一下联合仿真过程,简单的说,是两种软件量与量的交换过程。
首先在adams中会建立一个接受AMESim传来的量(f)驱动模型,然后从adams中输出一个模型量(w)传到AMESim。
建立adams模型:首先建立一个工作文件夹,adams和AMESim的工作目录全部指向它,注意这个文件夹的名字和路径全部为英文不能有其他符号和字符,视频教程中建在c盘根目录下,命名aa。
为了说明清楚,在这里仅建立了一个绕固定点旋转的杆件模型,在它和ground直接加入铰接关系,就是那个合页的连接关系,给它加入空间力矩。
然后在build下选system elements>stable variable>new建立新的变量(fAMESim输入扭矩),用同样的方法建立变量w(adams输出角速度),并且设置w的值,从build下选system elements>stable variable>modify选择model中的w,设定f=值,点击三个小点的按钮进入function build,在下拉框中选择velocity,单击anglar velocity about Z,点击assist,在to marker 栏右键单击,选择marker>browse,选择part2 cm(杆中心点),OK,Ok,删掉原有的0,然后确定,然后选择build>contral toolit>plant input在弹出对话框中,双击variable name 栏,Database Navigator中选择f,OK;同样在build>contral toolit>plant output的Database Navigator中选择w为输出变量,OK!将前面设定的扭矩值设定为f,就是在那个fuction窗口中选data element>plant input.从tool>plung manage>中选择control,调出control,在control下选择plant explorer,在plant input选择pinput1,在plant output选择poutput1,点确定。
Adams和AMESim联合仿真的设置和简单例子(都是13版本)
Adams和AMESim的联合仿真前言:本人并不是Adams和AMESim的高手,接触AMESim的时间很短,但是需要做Adams和AMEsim的联合仿真,这里分享一下我探索联合仿真的经验。
目录如下:一、仿真前需要做的准备。
1、软件的安装2、环境变量的设置二、一个具体的联合仿真例子。
(这里只介绍Adams主控的仿真)***********************************************************一、仿真前的准备1、软件的安装软件的版本对联合仿真有重要影响,这里只介绍我自己安装软件的情况。
我的系统是win7 32位,安装的软件是Adams2013、LMS b AMESim Rev 13、Visual Studio 2010。
Adams2013和AMESim Rev 13网上有很多下载资源和安装教程。
这里我只强调一下Visual Studio 2010。
也就是可以建立两个仿真软件联系的Visual C++程序。
Visual C++和VisualStudio等之间的关系大家可以自己在网上查,其实都包含有C++语言。
网上有些教程是用VC++6.0来建立两者之间的关系,但是我安装了VC++6.0的各种版本(企业版,中文版,英文版)都没有成功建立仿真,后来安装了完整的Visual Studio 2010就可以了,但是Visual Studio 2010有些大,我下载的是1.75G。
另外就是安装顺序,最好先安装VC++或者VS(我是最后安装的Visual Studio 2010,先安装的说法我这里并没有证实)。
下面是我的软件的安装位置,安装目录没有中文D:\zy\ADAMSD:\AMESimD:\Program Files\Microsoft Visual Studio 10.0在最后安装好Visual Studio 10后把D:\ProgramFiles\Microsoft Visual Studio 10.0\VC\bin下的nmake和vcvars32文件拷贝到AMESim的安装目录下D:\AMESim\v1300。
AMESim与ADAMS联合仿真操作说明
AMESim与ADAMS联合仿真操作说明摘要:物理系统可能由各种元件组成,例如气动的,机械的,液压的,电子的以及控制系统等,所有的元件协同工作。
多学科领域系统和复杂多体系统之间的相互作用很难在单一的软件平台中来仿真。
解决的方案就是通过AMESim和专用的多体动力学软件ADAMS之间的接口,使得两者在仿真中协同工作。
本文结合天线的简单实例介绍AMESim与ADAMS联合仿真的操作过程。
关键词:AMESim ADAMS 联合仿真1.引言AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。
机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。
运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。
这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。
通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真:(1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。
(2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。
2.软件环境要求首先AMESim软件需要4.2级以上版本; ADAMS需要2003级以上版本(含A/Control模块)。
其次必须要有Microsoft Visual C++ 编译器。
如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器,这样可以将AMESim的模型编译成为ADAMS的子函数(Subroutine)。
adamsamesim联合仿真
A/View(前、后置处理器包含模型建构、函数
A/Hydraulics(液压模组)
建构器、客户化界面设计、动画控制及输出、
A/Vibration(振动分析)
试验设计及最优设计等)
A/Solver(求解核心器,含运动、(准)静定、 动 力 学 的 线 性 及 非 线 性 分 析 , 可 与 C++ 或
MATRIXx
MATLAB
EASY5
AMESim
5
Virtual Prototyping 整合系統
设计阶段 节省时间
改善品质
BUILD
• 建构模型 • 输入 CAD 模型
TEST VALIDATE
• 建构驱动器, 感测器与建构测量 • 执行初步机构模拟
• 性能与已知资料比对 • 输入基本图表
REFINE
NO YES
• 试验设计
6
Virtual Prototyping 整合系統
设计阶段 节省时间
改善品质
BUILD
• 建构模型 • 输入 CAD 模型
TEST VALIDATE
REFINE ITERATE
• 建构驱动器, 感测器与建构测量
• 执行初I步-D机E构AS模拟
• 性能与U已G知资料比对 • 输入基C本A图T表IA
Pro/E
• 输入法C则ADDS 5 • 加入摩S擦o、lid滑w动or等ks 参数
CoCreate • What ifA?utoCAD
Microstation
改善效率 产品改善
OPTIMIZE • 最优化 • 敏感度研究
DOT
AUTOMATE
• •
使 自用 行M定ac义自ro对行命话令(G框A,SA..)
基于AMESim与Matlab/Simulink联合仿真技术的接口与应用研究
开发与设计 D i &Dvo et : ( eg e lmn ! / sn ep
基 于 A 与 Ma b\ ME i S m t l a S l k i mui n
联 合 仿 真 技 术 的 接 口与 应 用 研 究
4 )将 联 合 仿 真 的 许 可 证 文 件 lns.a 制 到 i eedt复 e AME i Sm安装 目录下 的 lns g i ei 文件夹 中。 e m 5 )确认 是 否在 AME i 中选 择 VC作 为编 译 器 。 sm 具体操 作 在 A sm— O i s AME i rf ecs " ME i p n— o Sm Pee ne ̄ r C mp ao/ aa tr 中。在 MAT . o itn P rme s li e L B命令 窗 口中输人 A 命令 Me- tD xs m ,选择 V . e C作 为编译器 。
种模 型,改变仿真参数 ,很有效地解 决仿 真技术 中的问
题。
A Sm作 为 一 个 完 整 的 系 统 工 程 仿 真 平 台, ME i Sm l k作为事实上 的控 制系统设 计 的标 准平 台。点对 i ui n 点的 AME i—ilik 口提供 了一个使用便捷 和行之 S S un 接 m nl 有效的工具用于 A Sm的被控对象模 型和控 制系统模 ME i 型之问的耦合分析 、同时利用 r A Sr 和 Sl lk的 ME i e iui n n 最佳功能 ,避 免了不同平台之间复杂模型 的重建。
i 。 m
法 国 I ai 公 司开发 的 A Sm是 当今领先 的流 mge n ME i
体 ,传动系统 和液 压/ 机械 系统 建模 ,仿真及 动力 学分
析软件。基于 Ma a tl 台的 Sm l k是动 态系统 仿真 lb平 iui n 领域 中著名的仿真集成环境 ,它在众多领域得 到广泛应 用 。S ui i lk借助 Ma m n t Mb的计算功能 ,可方便地建立各
Matlab Amesim Adams联合仿真
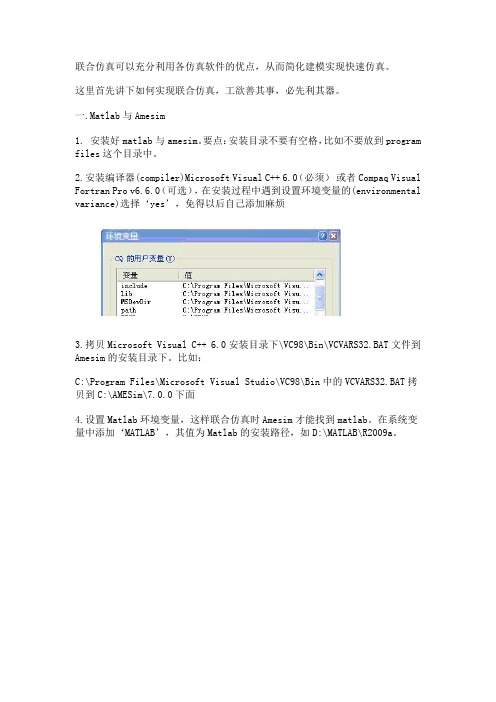
联合仿真可以充分利用各仿真软件的优点,从而简化建模实现快速仿真。
这里首先讲下如何实现联合仿真,工欲善其事,必先利其器。
一.Matlab与Amesim1. 安装好matlab与amesim。
要点:安装目录不要有空格,比如不要放到program files这个目录中。
2.安装编译器(compiler)Microsoft Visual C++ 6.0(必须)或者Compaq Visual Fortran Pro v6.6.0(可选),在安装过程中遇到设置环境变量的(environmental variance)选择‘yes’,免得以后自己添加麻烦3.拷贝Microsoft Visual C++ 6.0安装目录下\VC98\Bin\VCVARS32.BAT文件到Amesim的安装目录下。
比如:C:\Program Files\Microsoft Visual Studio\VC98\Bin中的VCVARS32.BAT拷贝到C:\AMESim\7.0.0下面4.设置Matlab环境变量,这样联合仿真时Amesim才能找到matlab。
在系统变量中添加‘MATLAB’,其值为Matlab的安装路径,如D:\MATLAB\R2009a。
5.在matlab中设置编译器(如下图)。
在matlab命令行里输入mex -setup,选择编译器Microsoft Visual C++6.0 ,最后选Y确定。
6. 在Amesim里选择编译器。
打开Amesim--tools--options--Amesim preferences选择Microsoft Visual C++7.在Matlab 的目录列表里加上AMESim与Matlab 接口文件所在的目录%AME%\matlab\amesim,其中%AME%是AMESim的安装目录,如果安装在C:\AMEsim ,则就加上C:\AMEsim\matlab\amesim。
(有的版本这个目录可能是安装目录\******ing\matlab\amesim)8.在matlab中set path中继续添加路径:%AME%\7.0.0\interface\simulink以及%AME%\7.0.0\interface\sl2ame9. 完成,实现amesim to simulink 和simulink to amesim 的联合仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
联合仿真技术及其主要方式
多学科和多软件平台协同建模和仿真技术 涉及机械、控制、液压等不同学科领域 是计算机仿真技术应用的发展趋势之一
市场
构思 设计 产品
市场
构思 设计 仿真 产品
3
联合仿真技术及其主要方式
基于接口的联合仿真: 软件独立建模;接口传递计算结果。
多体动力学 ADAMS
FM xvα
XV
18
联合仿真实现一种位置控制系统
利用MATLAB与ADAMS联合仿真实现
X
MATLAB/Simulink ADAMS
1 s2 +s+1 Step Transfer Fcn
PID PID Controller
adams _sub
F
19
谢
谢!
Thank you!
操作平台
伸缩油缸(内置)
一节臂 二节臂 三节臂四节臂 平台
样 机 模 型
15
变幅油缸
联合仿真的工程应用案例
高空车直线轨迹控制系统(ADAMS+MATLAB)
高度 速度
举升速度 (m/s)
距离
举升高度(m)
水平距离 (m)
时间(s)
时间(s)
平台举升曲线
平台水平运动曲线
16
联合仿真实现一种位置控制系统
液压系统 AMESim
vα x
FM x vα
FM
控制系统 MATLAB
4
工程软件ADAMS简介
ADAMS是美国MDI公司开发的机械系统运动学和 动力学仿真软件。
5
工程软件ADAMS简介
进入ADAMS/View
模型名称
菜单栏
主工具栏
全局坐标系 状态栏
6
工程软件ADAMS简介
1 3 5 7 4 6 8 4 连接 5 色盘 14 背景顏色
8
工程软件MATLAB简介
界面
当前目录
Simulink
工作路径
M文件 编辑器
历史命令
命令窗口
开始按钮
9
工程软件MATLAB简介
Simulink
10
联合仿真的工程应用案例
风电吊装缓冲装置(ADAMS+AMESim)
海上风电吊装
吊装对接的缓冲过程
11
联合仿真的工程应用案例
风电吊装缓冲装置(ADAMS+AMESim)
ADAMS/View工具栏
2 1 几何建模 2 测量 3 恢复/重做 8 建构力元素 12 左右视图 13 上下视图
15 其他 9 10 9 动态浏览 11 12 13 6 运动 7 移动 10 动态旋转 14 15 16 11 前后视图 16 视窗布置
7
工程软件MATLAB简介
MATLAB是美国Mathworks公司推出的高性能数 值计算和可视化软件。
ADAMS、MATLAB和AMESim机电液联合仿真 介绍及应用
刘鹏飞
2012 / 03 / 21
索
引
联合仿真技术及其主要方式 工程软件ADAMS/MATLAB简介 联合仿真的工程应用案例 联合仿真实现一种位置控制系统
液压系统 AMESim
多体动力学 ADAMS
控制系统 MATLAB
海上风电吊装简化图
ADAMS+AMESim
12
联合仿真的工程应用案例
高 度 变 化
H (mm)
风电吊装缓冲装置(ADAMS+AMESim)
零点起吊
F (N)
零点起吊 速 度 变 化
V (m/s)
蓄 能 器 压 力
P (MPa)
零点起吊
蓄 能 器 体 积
V (mm^3)
运行时间 t(s)
运行时间 t(s)
吊钩和风机运动曲线
缓冲缸和蓄能器曲线
13
联合仿真的工程应用案例
高空车直线轨迹控制系统(ADAMS+MATLAB)
变幅伸缩臂高空车
变幅伸缩臂高空车
14
联合仿真的工程应用案例
高空车直线轨迹控制系统(ADAMS+MATLAB)
控 制 方 程
墙壁
高 伸缩油缸 空 (内置) 作 业 变幅油缸 平 转台 台 下车
理想化阀控缸位置控制
+
I'X ∆IX PID IX 阀 Q 传感器 油缸 Y
X 位移/电流转换 IX 期望位移
-
液压缸输出位移 对阀流量传递函数
其中:A-液压缸有效面积;ωh-固有频率;ξh-阻尼比
17
联合仿真实现一种位置控制系统
利用AMESim与ADAMS联合仿真实现
F
AMESim ADAMS