电磁机构中电磁铁动态吸力特性的测定
电磁铁的动态特性的仿真与分析

2004 年 第 19 卷 第 3 期 Vol . 19 No. 3 2004 电 力 学 报 ( 总第 68 期) JOURNAL OF ELECTRIC POWER ( Sum. 68)
表1 层 - 支路关联信息 层 号
1 2 3
4 算例测试
本文用 Visual C + + 实现了基于支路功率的状 态估计算法 。为测试软件的性能 , 利用 IEEE34 节 点系统 [2 ] 。测试中 ,量测值采用潮流计算值加上量 测误差生成 , 量测误差是均值为 0 的随机误差 , 量 测权系数由程序自动取值为量测误差的方差的倒 数 [3 ] 。为说明状态估计的效果 ,分别计算量测值与 准确值之差 、 估计值与准确值之差 , 以量测值与准 确值之差为例说明算法 , 设第 i 个量测值为 m i , 对 应准确 值 为 ni , 则 量 测 值 与 准 确 值 之 差 定 义 为
3 基于面向对象技术的配电状态估计
a 1 按照上述方法进行网络分层 。 b1 初始化 。形成量测雅格比矩阵 H′ ′ P 和 H Q ,
计算法 [J ]1 电力系统自动化 ,1998 ,22 (8) :12~161
[2 ] IEEE Distribution Planning Working Group Report. Radial Distribution Test Feeders. IEEE Trans on Power Systems , 1991 ,6 (3) :975~9851 [3 ] 于尔铿 1 电力系统状态估计 [M]1 北京 : 水利电力出版
电磁式电器的工作原理
电磁式电器的工作原理电磁式电器在电气控制电路中应用最为普遍。
各类电磁式电器在工作原理和构造上基本相同。
其主要由电磁机构、触点系统和灭弧装置三部分组成。
1.电磁机构电磁机构是电磁式电器的感测部分。
电磁机构的主要作用是将电磁能转换成机械能,并带动触头动作,从而完成电路的接通或分断。
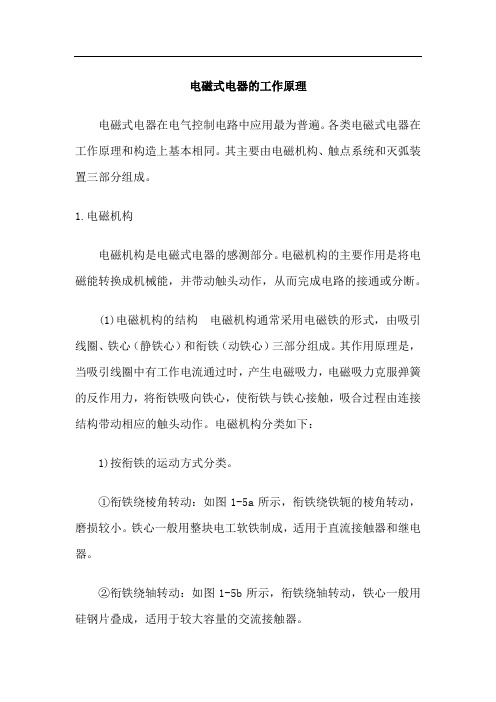
(1)电磁机构的结构电磁机构通常采用电磁铁的形式,由吸引线圈、铁心(静铁心)和衔铁(动铁心)三部分组成。
其作用原理是,当吸引线圈中有工作电流通过时,产生电磁吸力,电磁吸力克服弹簧的反作用力,将衔铁吸向铁心,使衔铁与铁心接触,吸合过程由连接结构带动相应的触头动作。
电磁机构分类如下:1)按衔铁的运动方式分类。
①衔铁绕棱角转动:如图1-5a所示,衔铁绕铁轭的棱角转动,磨损较小。
铁心一般用整块电工软铁制成,适用于直流接触器和继电器。
②衔铁绕轴转动:如图1-5b所示,衔铁绕轴转动,铁心一般用硅钢片叠成,适用于较大容量的交流接触器。
③衔铁直线运动:如图1-5c所示,衔铁做直线运动,较多用于中小容量的交流接触器和继电器中。
图1-5 常用电磁机构的结构示意图1—铁心 2—线圈 3—衔铁2)按磁系统形状分类。
电磁机构可分为U形(见图1-5a)和E 形(见图1-5b、c)。
3)按线圈的连接方式分类。
可分为并联(电压线圈,匝数多、导线细)和串联(电流线圈,匝数少、导线粗)。
4)按线圈电流的种类分类。
其可分为直流线圈和交流线圈两种。
对于交流电磁线圈,为了减小因涡流造成的能量损失和温升,铁心和衔铁用硅钢片叠成。
由于其铁心存在磁滞和涡流损耗,线圈和铁心都发热。
因此交流电磁机构的吸引线圈设有骨架,使铁心与线圈隔离,并将线圈制成短而粗的“矮胖”形,这样有利于铁心和线圈的散热。
对于直流电磁线圈,铁心和衔铁可以用整块电工软铁制成。
因其铁心不发热,只有线圈发热,所以直流电磁机构的吸引线圈做成细而长的“瘦高”形,且不设线圈骨架,使线圈与铁心直接接触,易于散热。
(2)吸力特性与反力特性电磁机构的工作情况常用吸力特性与反力特性来表征。
磁芯材料的静动态特性测量方法

软磁材料测量measurement of soft magnetic material反映软磁材料磁特性的各种磁学参量的测量,是磁学量测量的内容之一。
软磁材料一般指矫顽力Hc≤1000A/m的磁性材料,主要有低碳钢、硅钢片、铁镍合金、一些铁氧体材料等。
软磁材料的各种磁性能决定了由该材料制成的磁性器件或装置的技术特性,因此,软磁材料测量在磁学量测量中占有重要位置。
表征软磁材料的磁特性有各种曲线,可按工业应用要求来选择。
这些曲线主要是:工作在直流磁场下的静态磁特性曲线和反映磁滞效应的静态磁特性回线;工作在变化磁场(包括周期性交变磁场,脉冲磁场和交、直流叠加磁场等)之下、包括涡流效应在内的动态磁特性曲线和动态磁特性回线等。
这些磁特性曲线的横坐标是加在被测材料上的磁场强度H,纵坐标是材料中的磁通密度B。
这种表示方式使这些曲线只反映材料的性质,与材料的形状、尺寸无关。
此外,软磁材料的动态磁特性还包括复数磁导率和铁损。
(1)静态磁特性测量测量材料的静态磁特性曲线和磁特性回线,主要测量方法有冲击法和积分法两种。
①冲击法:用以测量静态磁特性曲线,测量线路见图1。
材料试样制成镯环形,并绕以磁化线圈和测量线圈。
前者通过换向开关、电流表和调节电流的可变电阻接到直流电源上;后者接到冲击检流计上(见检流计)。
开始测量时,通过电流表将磁化线圈中的电流调到某一数值,由电流表的读数、磁化线圈的匝数,以及材料试样的磁路几何参数,可计算出磁场强度H值。
然后,利用换向开关、快速改变磁化线圈中的电流方向,使材料试样中的磁通密度的方向突然改变,于是在测量线圈中感应出脉冲电动势e,e使脉冲电流流过冲击检流计。
检流计的最大冲掷与此脉冲电流所含的电量Q,也就是磁通的变化(△φ)成比例。
△φ在数值上等于材料试样中磁通的两倍。
由冲击检流计的读数和冲击常数(韦伯/格),以及材料试样的等效截面,可计算出相应的磁通密度B值。
改变磁化电流,可测出静态磁特性曲线所需的所有数据。
电磁铁性能测试方法

电磁铁性能测试方法
上海冉赛检测技术有限公司
作者:马忠新
介绍
电磁铁测试系统以进口测控卡、放大器为核心测控元件,伺服电机为动力源,实现了电磁铁恒定电流下力-位移测试、三角波电流下力-电流曲线测试,软件自动分析计算滞环(分析点可设置),实现了恒速位移控制、传感器标定、力-位移测试、力-电流测试、滞环分析计算、报表打印等功能。
同时放大器颤振频率、起始于峰值电流、通讯码率等参数可调,极大的丰富了系统功能。
测量系统
力-位移测试
设定电磁铁工作电流、移动速度、电磁铁行程,系统采用自动方式寻找与电磁铁的接触位置,接触后开始试验,测量力-位移曲线,自动记录、显示、分析数据。
力-电流测试
设定电磁特起始电流、峰值电流、电流持续时间、测试位置,系统自动到达指定位置后开始试验,记录力-电流曲线,分析数据。
软件界面
移动横梁界面
力-位移滞环曲线
报表打印
机械部分采用伺服电机作为动力输入,通过伺服电机、减速器传动,采用进口器件,机械间隙小,结构小巧,外置控制器,连接可靠。
采用计算机有限元分析方法,对高频测试下的结构进行了分析优化,避免了测试共振、强度不足等问题,稳定可靠。
规格参数
采样率:10-100kHz可调
力:量程500-5000N 精度0.5% 位移:量程500mm 精度0.5% 输出电流:0-3000mA
颤振频率:可调
死区电流:可调
电源:AC220V
放大器协议:RS232。
关于电磁继电器静态吸反力特性测试的研究

关于电磁继电器静态吸反力特性测试的研究【摘要】电磁继电器的静态吸反力是维系电磁继电器得以稳定运作的一个关键特性。
但长期以来静态吸反力特性测试一直都是一个难点,几种传统的测试方法都有一定缺陷。
基于此,为有效开展静态吸反力特性测试,本次研究就利用悬臂梁式应变片传感器作为测定静态吸反力特性的装置,由此设计了一套测试方法,直接从力特性的角度入手开展测试,克服以往间接测试方法的弊端,并通过实际应用验证了这种测试方式可行有效,希望能为相关领域工作者提供一定参考。
【关键词】电磁继电器;静态吸反力;力特性;测试电磁继电器静态吸反力就是驱动衔铁运动的电磁吸力以及机械负载产生的反作用力,电磁继电器的运作就是基于这两种力的配合,因此为评估电磁继电器的运行情况就需要测定吸反力特性。
传统的测试方法有弹簧秤法、克力计法、弹簧拉力法等[1],但是这些方法都存在一定的弊端,基于此,以下就提出一种基于悬臂梁式应变片传感器的静态吸反力特性测试方法,首先论述了测试方案的具体构成和测试原理,在此基础上,结合实践应用验证这种测试方案的实际效果,具体如下。
1.电磁继电器静态吸反力特性的传统测试方法对于电磁继电器静态吸反力特性的传统测试方法主要有弹簧秤法、克力计法、弹簧拉力法等,但这些方法都存在一定问题,以下就是这些方法的基本操作及其存在的不足。
1.1弹簧秤法这种方法就是利用弹簧秤,将其钩到被测部件上直接抻拉到达一定的状态,记录被测力的数据。
这是一种非常简单易行的测试方法,可以用来测试继电器、断路器等设施的触头压力,但这种测试方法的精度不是很高。
1.2弹簧压缩法这是检测就是对弹簧的拉伸或是压缩长度进行测量,由此评估继电器触头压力,以及继电器中弹簧产生反作用力[2]。
这种方式的测量原理和弹簧秤法类似,但是也存在同样的问题,就是测量精度不高,而且有的继电器也没有应用弹簧,并不是利用弹簧形成反作用力,显然这种方式无法适用于这类继电器的测试,适用范围比较有限。
电磁吸铁实验报告
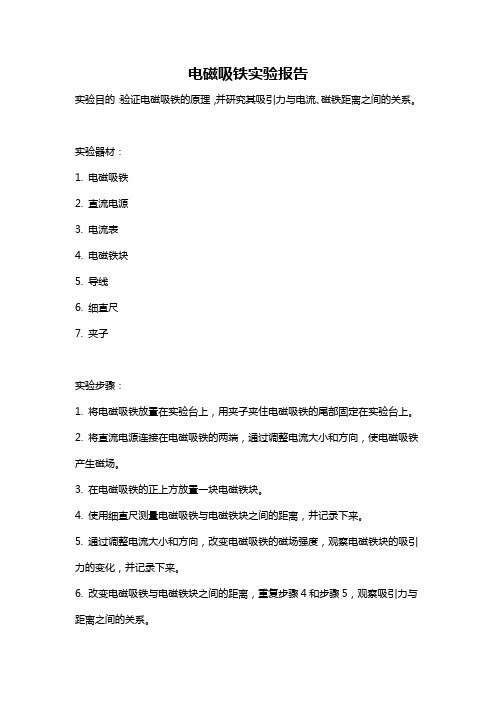
电磁吸铁实验报告
实验目的:验证电磁吸铁的原理,并研究其吸引力与电流、磁铁距离之间的关系。
实验器材:
1. 电磁吸铁
2. 直流电源
3. 电流表
4. 电磁铁块
5. 导线
6. 细直尺
7. 夹子
实验步骤:
1. 将电磁吸铁放置在实验台上,用夹子夹住电磁吸铁的尾部固定在实验台上。
2. 将直流电源连接在电磁吸铁的两端,通过调整电流大小和方向,使电磁吸铁产生磁场。
3. 在电磁吸铁的正上方放置一块电磁铁块。
4. 使用细直尺测量电磁吸铁与电磁铁块之间的距离,并记录下来。
5. 通过调整电流大小和方向,改变电磁吸铁的磁场强度,观察电磁铁块的吸引力的变化,并记录下来。
6. 改变电磁吸铁与电磁铁块之间的距离,重复步骤4和步骤5,观察吸引力与距离之间的关系。
实验结果与数据处理:
根据实验步骤所得到的数据,可以绘制吸引力与电流、吸引力与距离之间的关系图。
根据图像的变化,可以得到一些结论。
讨论与结论:
根据实验结果可以发现,电磁吸铁的吸引力与电流大小成正比,在电流增大时,吸引力也增大。
这是因为电流通过导线产生磁场,磁场强度增大会增加电磁吸铁的吸引力。
另外,实验结果还表明,电磁吸铁的吸引力与吸铁距离的平方成反比。
当吸铁距离增大时,吸引力减小。
这是因为磁场的强度随着距离的增加而减小,结果导致吸引力减小。
结论:
通过本次实验,我们验证了电磁吸铁的原理,并研究了吸引力与电流、吸铁距离之间的关系。
实验结果表明电磁吸铁的吸引力与电流大小和吸铁距离的平方成相关性,这些结果对于电磁吸铁的应用具有重要的意义。
电磁铁静动态性能测试系统研究与应用
, 提出了适合于比例电磁铁的试验方法及
测试指标, 并且在实际测试系统中进行了验证。 比例电磁铁的试验项目及测试指标 比例电磁铁的测试内容主要包括额定值测试、 静 态特性测试、 动态特性测试 M 个方面。本文所设计的 比例电磁铁综合测试系统主要是针对这 M 个方面进行 的。比例电磁铁根据其输出特性可以分为力型电磁 铁、 位移型电磁铁两大类。 对于力型电磁铁, 其额定值测试包括额定电流测 试、 额定力测试; 静态性能测试包括电流<力特性测试、 位移<力特性测试; 动态性能测试包括输出力阶跃响应 特性、 输出力频率响应特性。 对于位移型电磁铁, 其额定值测试包括额定电流 测试、 额定位移测试; 静态性能测试包括电流<位移特 动态性能测试包括输出位 性测试、 位移<力特性测试; 万方数据 移阶跃响应特性、 输出位移频率响应特性。
实现轴承座在铅垂面内的垂直升
降运动, 使轴承中心线和轧辊中心线处在同一水平面
"""""""""""""""""""""""""""""""""""""""""""""""" 使电磁铁动力头固定在其额定行程内的某一位置; 图 时电磁铁驱动电流取额定电流,通过液压缸的往复运 试验时电磁铁驱动电流分别 @H 为位移;力特性曲线, 取额定电流的 EDI 、 在每一给定电 D?I 、 >DI 、 =??I , 流下通过液压缸的往复运动使电磁铁动力头随之运 动, 进行测试; 图 @3 为阶跃响应特性曲线; 图 @. 为频 率响应特性曲线, 这两个试验同电流;力特性试验相 似, 也需要通过加载液压缸将电磁铁的动力头固定在 其额定行程内的某一位置。
比例电磁铁静动态特性检测系统设计

计算机 采集 系统包括计算机 、U B多功能数据采 S 集卡 、精密程控恒 流源 和 2 4 V开关 电源等 。所有 硬
1 测试 系统 的硬件 组 成
电磁铁测试 系统硬件 主要 包括机械台架和计算机
件安装在 一 个测 试 机箱 内。其 中,U B采 集卡 内含 S 1 6位 8通 道 A D,模拟 量 输入 范 围 一1 / 0~ +1 0 V,
电机 有 限 公 司 ,0 6 20.
M0
C I 0 D1 86 KI 7
C ov
站 点 号设 定 ;主 站设 定 为0
【】张丽萍 , 民.L 6 李卫 P C伺 服电机 和触摸屏 在模 内 自动贴
标机 中的应 用 [ ] 辽 宁工 业 大学 学 报 : J. 自然科 学 版 ,
比例 电磁 铁 静 动态 特 性检 测 系统 设计
柳 静 ,吴超 海 ,马 宁 ,杨 海 龙
( 中国计 量 学R _程 训 练 中心 ,浙 江杭 1 1 0 8 z - ・3 0 1 ) 3 ,
摘要 :比例 电磁铁是 多种电液 比例 阀重要 的执行器 件 ,其静 动态性能对 比例阀有关键影 响。为准确 方便 快速地测 试 比 例电磁铁 的各种静 动态 特性 ,设 计并研制 了一种 比例 电磁铁 性能测试 系统。该 系统 由机 械平 台、位移 和拉压力传 感器 、计 算 机采集控制 系统 和上 位机 V C++ . 6 0开发 的测试软件组成 。实验 结果 表ห้องสมุดไป่ตู้ :该 系统测试结果准确 可靠 ,操作方便 ,能够
进给机构 、电磁铁定位夹紧机构 、拉压力传感 器和光 栅位移传感器等组成 。台架实物 图如 图 1 。拉压力传 感器 选 择 J B —I L S I S型 传 感 器 ,量 程 5 0 N,精 度 01 . %。光栅 尺选 用信 合光 栅 SN A 30型 ,量程 IO K - 0 10m 2 m。栅距 2 m,经过后续 4倍频 辨向细分 电路 0 后位 移 分 辨 力 可 达 5 m。伺 服 进 给 加 载 机 构 由