雷达导引头 第1章
雷达原理

4
雷达原理
2.4 固态发射机
• 固态发射机发展概况和特点
– 逐步替代常规微波电子管发射机,优点如下 • 寿命长、可靠性高 • 体积小、重量轻 • 工作频带宽、效率高 • 系统设计和运用灵活、维护方便, 成本较低
– 平均功率大而峰值功率受限,适用于高工作比 雷达,如连续波雷达
– 在 UHF ~ L 波段发展较快
• 雷达的基本概念
– 利用电磁波的二次辐射、转发或目标固有辐射 来探测目标,获取目标空间坐标、速度、特征 等信息的一种无线电技术,相应的设备称为雷 达站或雷达机,简称雷达
– 二次辐射:反射(单基地)、散射(多基地)
– 转发:二次雷达(导航)
– 固有辐射:通信及雷达信号(被动/无源)、随 机热运动电磁辐射(导引头)
雷达原理
1.1 雷达的概念
• 雷达信号处理
– 目标信号总是被淹没于 杂波(+干扰)+ 噪声
的背景中 – 杂波及干扰强度往往超过目标信号的千万倍 – 信号处理作用
• 增强待测目标信噪比,提取目标参数 • 抑制杂波和干扰信号
雷达原理
1.2 雷达探测原理
• 雷达回波中的可用信息
– 斜距 R ( Rmax 可由雷达方程估算)
• 总效率
– 发射机输出功率与其输入总功率之比 – 对主振放大式发射机应改善输出级的效率
雷达原理
2.2 雷达发射机电性能指标
• 信号形式(调制形式)
– 不同信号形式对发射机的要求各异
波形 简单脉冲 脉冲压缩 高工作比多卜勒
调制类型 矩形调幅
线性调频、相位编码 矩形调幅
工作比(占空比)% 0.01 ~ 1 0.1 ~ 10 30 ~ 50
船用雷达详细介绍演示幻灯片
1. 基本原理:
基本雷达 a 天线
方位量化
d PPI /
b 定时
光栅扫描
收发机
转换
c 视频量化 e
扫描信号 光栅雷达信号 发生器
直角坐标 数据内存
a — 原始方位和船首信号;b — 触发脉冲;c — 原始视频;光雷栅达扫描 d — 数字方位信号;e— 数字视频
①将原始视频杂波抑制,然后与天线方位信号、船艏信号量化 ②进行坐标转换,产生光栅扫描信号
防管内打火
老练方法:
1.只加灯丝电压工作半小时以上 2.加较低的高压工作一段时间(时间视具体情况定) 3.如无打火现象,逐渐加高压到正常值
17
第一节 雷达发射机(Transmitter)
四、正常工作标志
通过收发箱内的表头或显示器上的磁控管电流指示判断
有——正常;无——不正常
五、性能检测
1.磁控管工作是否正常
2、二单元雷达: 天线收发机、显示器、中频电源
10
三、雷达传感器与 IBS
现代雷达 IBS的重要组成部分 定位、导航、避碰
主要传感器
雷达 罗经 计程仪 GNSS AIS ECDIS
11
第二章 船用雷达设备
12
第一节 雷达发射机(Transmitter)
一、组成部分及作用
至显示器 至接收机
脉冲调制器
触发脉冲 产生器
予调制器
调制器
发射机
至天线
磁控管
特高压 调制器
磁控管
低压 电源 来自电源
发 射 开 关
延 时 开 关
门 特高压 开 电源 关
雷达发射机
收发 开关
门开关 至接收机
触发脉冲产予调制器 生器
【国家自然科学基金】_雷达导引头_基金支持热词逐年推荐_【万方软件创新助手】_20140801
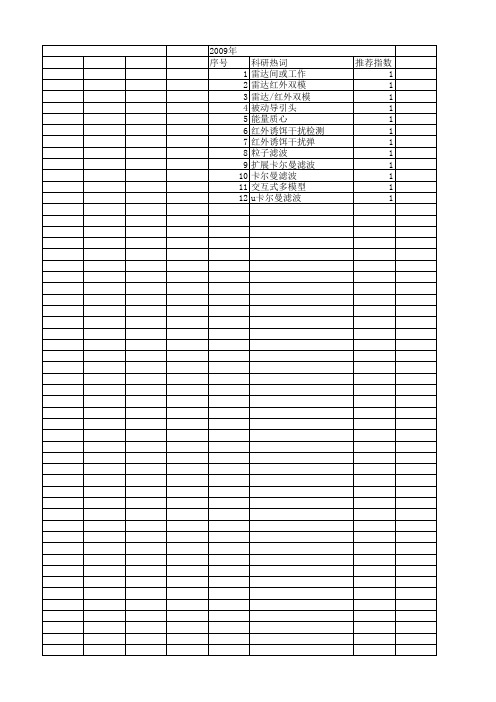
推荐指数 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
2013年 科研热词 雷达扩展目标 雷达工程 雷达导引头 雷达/红外双模导引头 雷达 隔离度寄生回路 隔离度 阻尼力矩 遗传算法 速度矢量估计 适应性 脱靶量 箔条干扰 矩形微带天线 相控阵雷达导引头 电磁干扰环境 波束综合 比例导引 极化雷达 极化检测 极化技术 最小二乘法 散射特性 抗干扰 成像系统 弹簧力矩 引制一体化 平台导引头隔离度 干扰检测 干扰抑制 巡航导弹 导引头 太赫兹 多普勒速度 坐标变换 固态器件 合成孔径 匀速直线运动 制导系统稳定性 共形阵列 全捷联 mimo雷达 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
科研热词 雷达导引头 抗干扰 辐射控制 质心干扰 被动雷达导引头(prs) 被动雷达导引头 缝隙等角螺旋天线 物元模型 热噪声 检测概率 极化 杂波 最晚辐射 斜投影 性能评估 微带线-槽线巴伦 宽带天线 复合导引头 主动通道 k分布
2010年 序号 1 2 3 4 5 6 7 8 9
科研热词 波达方向矩阵法 极化域-空域联合估计 数字高程图 小平面单元 均匀圆阵 反辐射导弹 全弹道仿真 sar导引头 rcs计算
被动雷达导引头的关键技术研究
和 俯仰 两 个偏 角 ,形成 数字 代码 。但这 种 方法测 出
才 能唯 一确 定雷 达信 号 的到达 方 向 ,而且这 种
当:
瞬 时频 率 :
If l z/ 2 m/ r 2 n
f=一 (, / n ) 2 m
() 5
() 6
方 法 的测 向范 围不 能覆 盖全 方位 。在本 方案 中采 用 线 性相 位 多模 圆 阵,用 多个天 线 组成 阵列 ,可实 现 全 方位 内的无模 糊测 向 ,而且 它是 一种 宽带 测 向技 术 , 不 同 的信 号 频 率 只 影 响 模 的 幅 度 而 不 影 响 相
在反 辐射 导弹 ( M )等 被动 雷达 导 引头 中 , AR 导 引头 接收 敌方 雷达 辐射 的电磁 信号 ,从而 测定 目 标 和它 的相 对位 置并 形成 导 引指 令 ,引 导导 弹摧 毁
的基 本 原理
处 理 系 统
Ur= Ue E
F (= ∑ P )
=∑ (Ⅳ ( P l 9 Ⅳ 一] ] ) J
K+ c , w o
: P
= 一
+1- ,
N
=
co s
(2 , 一" 1 o )
. v
式中:
为接 收 到 的复信 号 ,对 式 ( )中 的天 线 8
在式 ( ) , 9 中
宽 带 瞬 时 测 频 接 收 机
及 分 选 系 统
系 统等 组 成 。 宽 带瞬 时 测频 接 收 机 快速 捕 获 目标
的频 率参 数 并进 行高 精度 频率 测量 ,经 过 目标 识 别 及 分选系 统后 ,选 出威胁 等 级最 高 的信 号频 率 ,控 制频 率综 合 系统 ,产 生 宽带 多路测 向系统 需要 的 本 振信 号 ,打 开 多路测 向系统 ,形成 目标雷 达 的位 置 信息 ,数 据 综合 处理 系统 经数 据 融合 形成 目标 的 相 关信 息 ,并进 行 信 息分 配 ,形成 导 引指 令 , 控 制
相控阵雷达导引头总体技术研究
文章编号:1006-1576(2007)01-0003-02相控阵雷达导引头总体技术研究李秋生(赣南师范学院物理与电子信息学院,江西赣州 341000)摘要:相控阵雷达导引头具有波束扫描灵活、空间功率和时间资源分配可控等优点,具有有源/无源相控阵列组成形式。
前者每个天线单元用1个接收机和发射功率放大器,后者共用1个或几个发射机和接收机,采用时需综合考虑。
有源相控阵雷达导引头的组成有相控阵天线、波束控制计算机、T/R组件、激励器、功率分配器、波束形成网络、接收机、信号处理、数据处理、中央控制计算机等部分。
关键词:相控阵;雷达导引头;总体技术中图分类号:TJ765.331 文献标识码:ATotal Technique Research on Phased Array Radar SeekerLI Qiu-sheng(School of Physics & Electronic Information, Gannan Normal College, Ganzhou 341000, China) Abstract: Phased array radar seeker (PARS) has some merits such as agile beam scanning, controlled power & time resource allocation and so on. Its makeup has two forms such as active phased array and passive phased array. In the active phased array every antenna unit has a receiver and a transmitting power amplifier. However, all antenna units share one or several transmitters and receivers in the passive phased array. Comprehensive consideration is needed when choosing system schema. Active phased array radar seeker is made up of phased array antenna, beam control computer, T/R module, stimulator, power divider, beam forming network, receiver, signal processing, data processing and central control computer, etc.Keywords: Phased array; Radar seeker; Total technique0 引言相控阵雷达导引头具有灵活波束指向、可控空间功率及时间资源分配等特点。
第1章 雷达标绘基础知识课件

TIME IN MINUTES
第四节 雷达标绘纸 二、雷达标绘纸使用与注意事项 要注意雷达观测的模式,是北向上还是航向向 上!
SHIP
TIME
BEARING
RANGE
180
SPEED IN KNOTS
OWN SHIP
TARGET NO。 CPA TCPA COURS E SPEED ASPECT
DATE
OWN TIME SHIP'S COURSE ALTERATION MANOEUVRES SPEED ALTERATION
第三节
运动模式的选择
3、航向向上图象稳定相对运动模式 ①应用 值班驾驶员在避让、雷达观测和船舶定位时经常 使用。(综合前两种显示的优点)
第三节
运动模式的选择
② 特点 ⅰ、船首线指向荧光屏的上方。 ⅱ、可直接读取真方位(利用电子方位圈)和相对 方位(固定刻度圈)。 ⅲ、本船转向时,船首线转动,物标回波保持稳定。 转向结束后,按“新航向向上”按钮,船首线和图 象快速并同步转动,使船首线指向荧光屏的上方。
Vt
Vr + V。= Vt
V。 M
Vr
第一节 常用术语及一般定义 三、船舶间相对关系 1.船速比(K)及其意义 本船与来船船速比 K=1:两船船速相等 K>1:本船船速比他船船速大 K<1:本船船速比他船船速小 K>1 本船船速快,本船避让效果好。
第一节 常用术语及一般定义 2.相对航向线弦角q 来船相对运动轨迹,称为相对航向线,也称相对 运动线 HL
M Vr
第二节
船舶的真运动与相对运动
②上等式两边同时乘以相同的时间可得 Sr + S0 = St 其中: Sr :相对航程 S0 :本船航程 St :他船航程
《雷达导引头概论》读书笔记思维导图PPT模板下载
5.3 指令形成
0 1
5.1.1 常 规检测
0 2
5.1.2 恒 虚警检测
0 3
5.1.3 预 定检测
0 4
5.1.4 高 分辨检测
0 6
5.1.6 积 累检测
0 5
5.1.5 识 别检测
5.2.1 速度信息 5.2.2 距离信息
5.2.3 角度信息 5.2.4 仿形处理
5.3.2 制导指令
5.3.1 管理指令
06 第6章 主动导引头
目录
07 第7章 半主动导引头
08 第8章 被动导引头
09 第9章 复合导引头
010 第10章 系统设计
011 第11章 分系统技术
012 第12章 试验技术
目录
013 附录A 缩略术语汇总 表
015 参考文献
014
附录B 物理量符号汇 总表
本书介绍雷达导引头的基本体制和相关技术,全书共12章,内容包括概述、目标、环境、信号与噪声、导引 头基本功能、主动导引头、半主动导引头、被动导引头、复合导引头、系统设计、分系统技术和试验技术。本书 可作为从事雷达导引头研制工作的工程技术人员和高等院校相应专业师生的参考书。
11.3.6 信道化 接收机
11.3.5 锁相接 收机
11.3.7数字化接 收机
11.4.1 功能与技 术要求
11.4.2 硬件结构
11.4.3 软件流程
11.4.4 主要子程 序
11.5.1 功能 1
与技术要求
11.5.2 原理 2
框图与主要部 件
3 11.5.3 角预
定回路
4 11.5.4 角稳
10.5.2 可靠 2
性模型
3 10.5.3 可靠
相控阵雷达导引头关键技术初探_李秋生

1 ) 产生波束驻留指令 , 包 括波束的角位置 、发射时间 、频 率 、波形 、脉冲周期 、检测门限 、 波束驻留标志等 ;
2) 对波束控制和信号处理 等实施统一管理 ;
3) 处理目标回波数据 , 包 括检测 、跟踪及相关处理 ;
4) 为控制系统提供所需的 数据 (指令 ) ;
5) 使导引头 、计算机资源 与整个任务负载相匹配 ;
此外 , 具有与弹头共形的曲 面毫米波相控阵雷达导引头国外 也早已在开展技术攻关 , 目前阵 元配置 、波束控制及馈电结构等 方面还存在诸多困难 。
2 总体方案选择 与地面或机载相控阵雷达类
似 , 相控阵导引头的典型组成方 案是用移相器控制波束的发射和 接收 , 共有两种组成形式 : 一种 称为有源相控阵列 , 每个天线单
本文 2006208214收到 , 作者系赣南师范学院硕士研究生
飞航导弹 2007年第 6期
·55·
© 1994-2010 China Academic Journal Electronic Publishing House. All rig, 张明友. 雷达系统. 北 京 : 电子工业出版社 , 2001
[ 2 ] 张光义. 相控阵雷达系统. 北京 : 国防工业出版社 , 1994
[ 3 ] 殷连生. 低副瓣有源相控阵天馈 系统中的一体化设计. 电子与信 息学报 , 2002, 24 (10) : 1412~ 1417
RΔα (m , n) /RA (m , n) , RΔβN (m ,
n) = RΔβ (m , n) /RA (m , n) 。为 解决和差矛盾并简化馈电网络的 设计 , 接收波束的和差形成一般 采用部分独立的方法 , 例如可选 择和差独立点数尽可能少的贝利 斯分布来设计 [ 3 ] 。 3. 3 捷联去耦
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2 寻的制导体制
4.复合寻的制导 除了单一体制的主动、半主动和被动寻的制导外,还可以将它 们组合成复合寻的制导系统,如被动/主动复合制导系统和半主动/ 主动复合制导系统等。
1.3
导引头分类
依据信息载体的不同形式,导引头可分为雷达导引头、红外导 引头、激光导 引头等类型。 在雷达导引头中,目标信息以无线电波为载体。 相应于寻的制导体制, 雷达导引头可分为主动导引头、半主动 导引头、被动导引头和复合导引头。
1.3
4. 复合导引头 如前所述,单一体制的主 动、半主动和被动导引头 可以组合成复合导引头。 被动/主动复合导引头和半 主动/主动复合导引头是两 种常用的复合导引头。 1)被动/主动复合导引头 图1-10为被动/主动复 合导引头的简化框图,它 由被动寻的模式与主动寻 的模式复合而成,共用一 个伺服系统。
θ M为导弹速 线的夹角;
度矢量与基准线的夹角; 为目标速度矢量与基
θ 准线的夹角。 T
,φ
q 、θ M 、 θT 三个角度均以基准线为参照,逆时针旋转为正值。另外
M
置角。
、φT 分别为导弹速度矢量、目标速度矢量与视线的夹角,称为前
1.1 寻的制导原理
由图1-2可以列出导弹-目标运动方程:
dRMT ( t ) = −vM ( t ) cos φM ( t ) + vT ( t ) cos φT ( t ) dt R t dq ( t ) = −vM ( t ) sin φM ( t ) + vT ( t ) sin φT ( t ) MT ( ) dt θM (t ) − q (t ) φ= M (t ) θT ( t ) − q ( t ) T (t ) φ=
图1-8 半主动导引头的简化框图
1.3
导引头分类
图1-8 半主动导引头的简化框图 直波天线和直波接收机接收并处理来自照射器的直波信号,从中提取 相参基准。回波天线和回波接收机接收并处理目标散射的回波信号。相参 处理器对基准信号和回波信号做相参处理,获取多普勒信息。信息处理机 在进行频域跟踪的基础上,通过伺服系统对目标实施角跟踪,提取目标的 角信息。由于导引头中不包含发射设备,导引头不具备自主探测能力,故 称其为半主动导引头。 连续波半主动导引头、间断连续波半主动导引头是两种常见的半主动 导引头。无直波半主动导引头和逆单脉冲半主动导引头是开发中的两种新 型半主动导引头。
dq ( t ) uk ( t ) = ku N vr ( t ) dt
(1-6)
式中: ku 为电压转换系数。
1.1 寻的制导原理
导弹驾驶仪中的加速度计测得导弹的横向加速度,相应的电压值为 u aM ( t ) = k u a M ( t ) (1-7) 式中的 ku系数应与式(1-6)中的电压转换系数相同。 比例导引系统的基本 结构如图1-3所示,该系统 中的雷达导引头包含了指 令形成功能,也可以将此 功能纳入制导计算机。 制导过程中,自动驾驶仪提 取的误差信号为 u= uk ( t ) − uaM ( t ) (1-8) e (t ) 由误差信号控制驾驶仪的 图1-3 比例导引系统的基本结构 执行机构,操纵导弹飞向目标。
1.2 寻的制导体制
1.主动寻的制导 在主动寻的制导系统中,弹载探测设备装有发射和接收装置,发射装置朝 目标方向发射信号,接收装置接收目标的反射信号,从中获取目标信息, 并由弹上计算机形成控制信号,操纵导弹飞向目标。图1-4是主动寻的制 导示意图。
图1-4 主动寻的制导示意图 主动寻的制导不需要导弹以外的其他设备参与制导,具有发射后不管 或交班后不管的自主制导能力。然而,正因为主动探测设备必须自行发射 信号,使导弹处于有源工作状态,易被敌方反辐射武器侦察和攻击。
(1-1)
1.1 寻的制导原理
导弹的运动参数 、 由导引方程约束,采用不同的 约束方程,可获得不同的导引规律。比如采用比例导引 规律时,导弹的速度矢量的转动速率 dθ M ( t ) / dt 比例于 视线角速率 dq ( t ) / dt ,即
dθ M ( t ) dq ( t ) = kg dt dt
图1-5 半主动寻的制导示意图
1.2 寻的制导体制
3.被动寻的制导 被动寻的制导系统是利用目标的辐射信号工作的。导弹上的接 收装置接收目标的辐射信号,从中提取角度信息,并由弹上计算机形 成控制信号,操纵导弹飞向目标。 图1-6是被动寻的制导示意图。
图1-6 被动寻的制导示意图
1.2 寻的制导体制
雷达导引头
沈阳航空航天大学 刘昕
第1章 概述
1.1 寻的制导原理
1.2 寻的制导体制
1.3 导引头分类
概述
雷达导引头又称无线电寻的器,它是一种安装在导 弹头部的探测装置,是无线电寻的制导系统的关键设备。 所谓制导就是控制导弹以一定的规律接近并摧毁目 标。不同于指令制导、驾束制导、惯性制导和导航制导, 寻的制导是利用弹上探测装置发现目标,测量目标相对 于导弹的位置参数和运动参数,形成控制指令,操纵导 弹飞向目标的一种制导方式。 本章介绍寻的导弹的制导原理、制导体制和导引头 分类。
为了改善弹道特性,通常采用修正比例导引。为了使弹道具 有单值性,比例导引系数应为 (1-4) 式中: N 为有效导航比;vr ( t ) 为径向速度,又称接近速度。 将式(1-3)和式(1-4)代入式(1-2),可得修正比例导 引方程:
dq ( t ) aM ( t ) = N vr ( t ) dt
1.2 寻的制导体制
2.半主动寻的制导 半主动寻的制导系统的照射器安装在地面、舰艇或飞行器上。制导过 程中,照射器朝目标方向发射信号,导弹上的接收装置接收目标的散 射信号,提取目标信息,并由弹上计算机形成控制信号,操纵导弹飞 向目标。图1-5是半主动寻的制导示意图。 就武器系统而言,半主动寻的制 导系统仍然是一个自主制导系统,只 是将发射与接收设备分离配置而己。 但是导弹上的接收装置却处于非自主 工作状态,必须依赖照射器对目标的 照射,才能获取目标回波,得到目标 信息,故称其为半主动探测装置。 半 主动制导过程中,照射器必须持续不 断地朝目标方向发射信号。显然,照 射器易受反辐射武器的攻击。
kg = N vM ( t ) vr ( t )
(1-5)
1.1 寻的制导原理
(1-5) 为了实现修正比例导引,除了实时测量dq ( t ) / dt 和 vM ( t ) 值 外,还需提取 信息。尽管修正比例导引一般不需要距 离信息,但是为了进一步改善制导性能,应在不同的导弹目标距离上,适当调整有效导航比。在这种情况下,提取距 离信息仍然是必要的。制导信息 、 vr ( t ) 和 RMT ( t ) 由 导引头测量,并由指令形成电路给出指令电压
被动寻的制导系统中,导弹本身不发射信号,处于隐蔽工作状 态。文献[2]列出了被动寻的体制的三种模式:反辐射寻的(ARH)模 式、基于干扰的寻的(HOJ)模式和辐射计测量寻的模式。 (1)反辐射寻的模式可用于空地导弹、空空导弹或地空导弹, 攻击 敌方雷达。 (2)基于干扰的寻的模式是弹载主动探测设备或半主动探测设备兼 备的探测瞄准式自卫干扰源的寻的方式。 (3)辐射计测量寻的模式是利用目标固有的热辐射探测目标,可作 为攻击地面目标的亳米波导引头的一种末端探测模式。 本书阐述的被动寻的制导系统是反辐射寻的模式,它依赖于目 标的辐射信号,一旦目标停止辐射,反辐射寻的制导系统将失去制 导能力。
导引头分类
图1-7 主动导引头的简化框图
脉冲主动导引头、准连续波主动 导引头和脉沖多普勒主动导引头 是三种常见的主动导引头。相控 阵导引头和合成孔径导引头是两 种尚在开发中的主动导引头。
1.3
导引头分类
2.半主动导引头 半主动寻的制导系统中,载体信号来自制导站的照射器,导引 头接收机的接收信号为目标对照射信号的散射波。 半主动导引头由直波天线、直波接收机、回波天线、回波接收 机、相参处理器、信息处理机和伺服系统组成,图1-8是其简化框图 。
1.2 寻的制导体制
在寻的制导系统中,弹载探测设备是一个时空信号处 理器,它的任务是检测目标、跟踪滤波和提取目标信息。 弹载探测设备的首要任务是从复杂的杂波和干扰背景中检 测目标散射或辐射的信号,从中提取目标相对于导弹的位 置参数和运动参数,获取制导信息。根据弹体信号的不同 来源,寻的制导系统可分为主动寻的制导、半主动寻的制 导、被动寻的制导和复合寻的制导。
导引头分类
图1-10 被动/主动复合导引头的简化框图
1.3
弹上制导计算机装定被动模式探测 天线的指向,其宽波束足以在远距 离上覆盖被攻击目标,信号分选系 统借助目标雷达信号的先验信息( 如载频、重复频率、脉冲宽度等) 和制导系统提供的目标分布域的张 角信息,从进入被动天线的众多信 号中选择并锁定目标雷达信号,提 取目标的角度信息,实施角跟踪。 在被动模式角跟踪过程中,联动主 动天线使其指向目标,当目标进入 主动模式的探测距离范围时,主动 模式检测识别目标,并进行距离、 速度和视线角速度测量,获取精确 制导系统的弹上设备由导引头(探测装置)、自动驾驶 仪(控制设备)与弹体(控制对象)组成。如图1-1所示。
图1-1 寻的制导系统的弹上设备
在寻的制导阶段,导引头发现并跟踪目标,提取目标相 对于导弹的位置和运动信息,弹上计算机利用目标信息形成 控制信号控制自动驾驶仪,改变导弹的飞行姿态。飞行过程 中,导引头实时更新目标信息,弹上计算机不断产生新的控 制信号控制导弹飞行,直至接近并摧毁目标。
1.3
1.主动导引头 主动导引头是一部弹载雷达装 置。 主动导引头由天线、发射 机、接收机、信息处理机和伺 服系统组成,图1-7是其简化 框图。发射机产生载体信号照 射目标,接收机接收目标反射 的回波信号,信息处理机提取 目标信息,伺服系统控制天线 实现角预定、角稳定和角跟踪 。主动导引头收发兼备,是一 部完整的弹载雷达。
(1-2)
式中, k g为比例导引系数。通常, dq ( t ) / dt 由导引头提 取,而 测量,即 由导弹自动驾驶仪中的加速度计间接