基于ERDAS IMAGINE 的遥感图象去云方法
遥感影像去除云的方法
遥感影像去除云的方法【摘要】:随着遥感技术的迅速发展,高分辨率遥感影像的应用越来越广泛,但它也极易受到气候因素的影响,云层遮挡就是影响之一。
去云不仅是遥感影像进行准确解译的基础,也是增强遥感数据有效性、可用性的重要途径,故遥感影像去云具有十分重要的实际意义。
本文在总结常用去云方法基础上,对遥感影像薄云去除方法从图像处理角度进行了深入研究,对遥感影像厚云处理方法亦进行了探讨并改进。
论文主要研究内容及结论如下: 1、总结常用去云方法,得到去除薄云的基本思路,为后续研究奠定基础。
2、对常用遥感影像去薄云的方法分区域处理,并探讨直方图匹配的改进,实验证明改进方法去云效果更为理想。
3、利用数学形态学中闭开运算的滤波性质,将数学形态学引入遥感影像薄云处理中。
将多结构元素数学形态学应用到去薄云中,深入的探讨了不同结构元素在去云中的作用;在传统的分通道处理和基于HIS变换处理的基础上,引入数学形态学处理彩色遥感影像的薄云。
研究表明,数学形态学方法去除影像薄云可行有效,在合理选取结构元素的条件下,处理效果优于传统方法。
4、在现有影像厚云去除方法基础上,探讨并实现了基于影像匹配的厚云去除方法。
采用同一地区的航片IKONOS影像上的厚云遮挡区域进行替换修补实验,实验证明该算法可以实现高分辨率遥感影像厚云区域的影像修复,直方图匹配及接缝处理后可以达到理想的修补视觉效果。
5、引入平均灰度、标准差、熵值、峰值信噪比和平均绝对偏差等指标对薄云去除后的影像进行统计分析评价。
比较各项指标可知,广义多结构元素方法能够较好地保持影像细节信息,去薄云处理效果最好;处理彩色遥感影像薄云时,分通道处理方法优于HIS变换方法。
,关键字:遥感影像去云图像处理同态滤波一.实习内容去除遥感影像lainer.img中的云层二.实习目的遥感成像过程极易受云雾的影响,遥感图像中被云雾遮盖的区域直接影响了图像的图像信息的判读,分析和使用,使得图像的有效利用率降低,因此,研究如何有效地减少或消除云雾的影响,对于提高遥感图像的利用率具有重要的现实意义和经济意义。
基于ERDASIMAGINE遥感影像的配准
CHINA PLACENAME韩笑(辽宁省地理信息院,辽宁沈阳110034)[摘要]本文针对遥感影像的特点,介绍了如何使用ER DASIMAGINE 纠正航空影像的偏差以及应该注意的问题等。
[关键词]地图;ER DAS IMAGINE ;影像配准[中图分类号]P2[文献标识码]A[文章编号]1002-7793(2010)007-0055-001.5基于ERDAS IMAGINE 遥感影像的配准遥感图像在成像时,由于成像投影方式、传感器外方位元素变化、传感介质的不均匀、地球曲率、地形起伏、地球旋转等因素的影响,获得的遥感图像相对于地表目标存在一定的几何变形,使得图像上的几何图形与该物体在所选定的地图投影中的几何图形产生差异,造成形状或位置的失真。
这主要表现为位移、旋转、缩放、仿射、弯曲和更高阶的歪曲,且其精度直接影响后续处理工作的质量。
要在这样的麦积林区遥感图像上进行森林资源调查,必须先用ERDAS IM AGINE 进行几何精度纠正。
只有消除了几何变形,才能进一步进行分析研究,开展图像解译、专题分类等研究。
一、ERDAS IMAGINE 软件简介ERDAS IM AGINE 是美国ERDAS 公司开发的遥感图像处理系统,以其先进的图像处理技术,友好、灵活的用户界面和操作方式,面向广阔应用领域的产品模块,服务于不同层次用户的模型开发工具以及高度的RS/GIS (遥感图像处理和地理信息系统)集成功能,为遥感及相关应用领域的用户提供了内容丰富、功能强大的图像处理工具,代表了遥感图像处理系统未来的发展趋势。
利用遥感影像进行专题信息提取和专题图的制作,是遥感专业领域的一个重要内容。
它涉及遥感影像的几何纠正、镶嵌、监督或非监督分类等操作步骤。
利用ERDAS IM AGINE 9.1软件能够方便、高效地实现上述功能。
二、影像数据的预处理本文以某地区TIFF 格式遥感影像数据为例,介绍遥感专题信息提取和专题图的制作的方法,以及ERDAS IM AGINE9.1软件的操作要点。
遥感影像去云方法
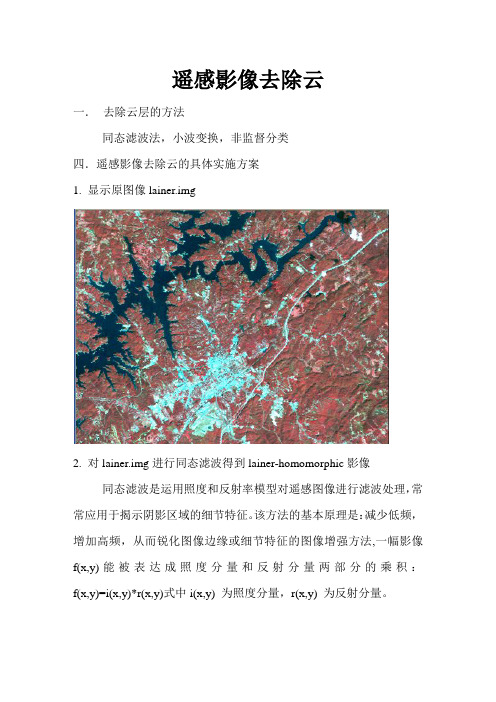
遥感影像去除云一.去除云层的方法同态滤波法,小波变换,非监督分类四.遥感影像去除云的具体实施方案1. 显示原图像lainer.img2. 对lainer.img进行同态滤波得到lainer-homomorphic影像同态滤波是运用照度和反射率模型对遥感图像进行滤波处理,常常应用于揭示阴影区域的细节特征。
该方法的基本原理是:减少低频,增加高频,从而锐化图像边缘或细节特征的图像增强方法,一幅影像f(x,y)能被表达成照度分量和反射分量两部分的乘积:f(x,y)=i(x,y)*r(x,y)式中i(x,y) 为照度分量,r(x,y) 为反射分量。
3. 对图像lanier.img进行傅立叶变换傅里叶变换图像就是把输入的空间域彩色图像转换成频率域,把RGB彩色图像转换成一系列不同频率的二维正弦波傅里叶图像(*.fft)。
4. 低通滤波:消弱图像的高频组分,而让低频组分通过,是图像更加平滑,柔和。
操作如下所示:5.对lainer-homomorphic影像进行非监督分类非监督分类的过程及结果如下所示:6.去除云层处理一幅图像的照度分量通常表现为空间域的慢变化为特征,而反射分量往往引起突变,特别是在不同物体的连接部分,这些特征导致图像对数的傅里叶变换的低频部分与照射分量相联系,而高频部分与反射分量相联系在一起。
在图像处理过程中我们可以将云雾信息作为照射分量来处理,通过使用同态滤波器减少低频的贡献,而增加高频的贡献来达到云雾去除的效果,其处理流程如下图所示:F(x,y)→LN→FFT→H(x,y)→∮FFT→exp→u(x,y)经过同态滤波的方法去除lainer-homomorphic影像的云层遮盖的结果如下所示:五.结果评价及分析ERDAS MAGNE遥感图像处理系统,在遥感图像处理上,提供了傅里叶变换,傅里叶逆变换以及傅里叶变换编译器等功能,为实现较好的去云效果,利用同态滤波云雾去除的模型对图像进行处理。
经处理,有云雾的遥感图像得到了不同程度的去除,图像模糊程度轻,噪声滤除的效果较好。
ERDASIMAGINE遥感图像处理教程.

ERDASIMAGINE遥感图像处理教程.《ERDAS IMAGINE遥感图像处理教程》根据作者多年遥感应用研究和ERDAS IMAGINE软件应用经验编著而成,系统地介绍了ERDAS IMAGINE 9.3的软件功能及遥感图像处理方法。
全书分基础篇和扩展篇两部分,共25章。
基础篇涵盖了视窗操作、数据转换、几何校正、图像拼接、图像增强、图像解译、图像分类、子像元分类、矢量功能、雷达图像、虚拟GIS、空间建模、命令工具、批处理工具、图像库管理、专题制图等ERDAS IMAGINE Professional级的所有功能,以及扩展模块Subpixel、Vector、OrthoRadar、VirtualGIS等;扩展篇则主要针对ERDAS IMAGINE 9.3的新增扩展模块进行介绍,包括图像大气校正(ATCOR)、图像自动配准(AutoSync)、高级图像镶嵌(MosaicPro)、数字摄影测量(LPS)、三维立体分析(Stereo Analyst)、自动地形提取(Automatic Terrain Extraction)、面向对象信息提取(Objective)、智能变化检测(DeltaCue)、智能矢量化(Easytrace)、二次开发(EML)等十个扩展模块的功能。
《ERDAS IMAGINE遥感图像处理教程》将遥感图像处理的理论和方法与ERDAS IMAGINE软件功能融为一体,可以作为ERDAS IMAGINE软件用户的使用教程,对其他从事遥感技术应用研究的科技人员和高校师生也有参考价值。
目录基础篇第1章概述21.1 遥感技术基础21.1.1 遥感的基本概念21.1.2 遥感的主要特点21.1.3 遥感的常用分类31.1.4 遥感的物理基础31.2 ERDAS IMAGINE软件系统6 1.2.1 ERDAS IMAGINE概述6 1.2.2 ERDAS IMAGINE安装7 1.3 ERDAS IMAGINE图标面板11 1.3.1 菜单命令及其功能111.3.2 工具图标及其功能141.4 ERDAS IMAGINE功能体系14第2章视窗操作162.1 视窗功能概述162.1.1 视窗菜单功能172.1.2 视窗工具功能172.1.3 快捷菜单功能182.1.4 常用热键功能182.2 文件菜单操作192.2.1 图像显示操作202.2.2 图形显示操作222.3 实用菜单操作232.3.1 光标查询功能232.3.2 量测功能242.3.3 数据叠加显示252.3.4 文件信息操作272.3.5 三维图像操作292.4 显示菜单操作332.4.1 文件显示顺序332.4.2 显示比例操作332.4.3 显示变换操作342.5 AOI菜单操作342.5.1 打开AOI工具面板35 2.5.2 定义AOI显示特性35 2.5.3 定义AOI种子特征35 2.5.4 保存AOI数据层36 2.6 栅格菜单操作372.6.1 栅格工具面板功能37 2.6.2 图像对比度调整392.6.3 栅格属性编辑402.6.4 图像剖面工具432.7 矢量菜单操作452.7.1 矢量工具面板功能46 2.7.2 矢量文件生成与编辑472.7.3 改变矢量要素形状482.7.4 调整矢量要素特征482.7.5 编辑矢量属性数据492.7.6 定义要素编辑参数502.8 注记菜单操作502.8.1 创建注记文件512.8.2 设置注记要素类型522.8.3 放置注记要素522.8.4 注记要素属性编辑542.8.5 添加坐标格网55第3章数据输入/输出563.1 数据输入/输出概述563.2 二进制图像数据输入573.2.1 输入单波段数据573.2.2 组合多波段数据583.3 其他图像数据输入/输出59 3.3.1 HDF图像数据输入操作59 3.3.2 JPG图像数据输入/输出60 3.3.3 TIFF图像数据输入/输出61第4章数据预处理624.1 遥感图像处理概述62 4.1.1 遥感图像几何校正62 4.1.2 遥感图像裁剪与镶嵌63 4.1.3 数据预处理模块概述63 4.2 三维地形表面处理64 4.2.1 启动三维地形表面64 4.2.2 定义地形表面参数65 4.2.3 生成三维地形表面66 4.2.4 显示三维地形表面67 4.3 图像几何校正674.3.1 图像几何校正概述67 4.3.2 资源卫星图像校正70 4.3.3 遥感图像仿射变换76 4.3.4 航空图像正射校正78 4.4 图像裁剪处理814.4.1 图像规则裁剪814.4.2 图像不规则裁剪824.4.3 图像分块裁剪844.5 图像镶嵌处理844.5.1 图像镶嵌功能概述84 4.5.2 卫星图像镶嵌处理90 4.5.3 航空图像镶嵌处理934.6 图像投影变换954.6.1 启动投影变换954.6.2 投影变换操作964.7 其他预处理功能964.7.1 生成单值栅格图像964.7.2 重新计算图像高程974.7.3 数据发布与浏览准备97 4.7.4 产生或更新图像目录98 4.7.5 图像范围与金字塔计算99第5章图像解译1005.1 图像解译功能概述1005.1.1 图像空间增强1005.1.2 图像辐射增强1015.1.3 图像光谱增强1015.1.4 高光谱基本工具1025.1.5 高光谱高级工具1035.1.6 傅里叶变换1035.1.7 地形分析功能1045.1.8 地理信息系统分析104 5.1.9 实用分析功能1055.2 空间增强处理1065.2.1 卷积增强处理106 5.2.2 非定向边缘增强107 5.2.3 聚焦分析1085.2.4 纹理分析1095.2.5 自适应滤波1105.2.6 统计滤波1115.2.7 分辨率融合1115.2.8 改进IHS融合112 5.2.9 HPF图像融合114 5.2.10 小波变换融合115 5.2.11 删减法融合1165.2.12 Ehlers图像融合117 5.2.13 锐化增强处理118 5.3 辐射增强处理1205.3.1 查找表拉伸1205.3.2 直方图均衡化120 5.3.3 直方图匹配1215.3.4 亮度反转处理122 5.3.5 去霾处理1235.3.6 降噪处理1235.3.7 去条带处理1245.4 光谱增强处理1245.4.1 主成分变换1245.4.2 主成分逆变换1255.4.3 独立分量分析1265.4.4 去相关拉伸1275.4.5 缨帽变换1275.4.6 色彩变换1295.4.7 色彩逆变换1295.4.8 指数计算1305.4.9 自然色彩变换1315.4.10 ETM反射率变换131 5.4.11 光谱混合器1335.5 高光谱基本工具135 5.5.1 自动相对反射1355.5.2 自动对数残差1365.5.3 归一化处理1365.5.4 内部平均相对反射137 5.5.5 对数残差1375.5.6 数值调整1385.5.7 光谱均值1395.5.8 信噪比功能1395.5.9 像元均值1405.5.10 光谱剖面1415.5.11 光谱数据库1425.6 高光谱高级工具142 5.6.1 异常探测1425.6.2 目标探测1475.6.3 地物制图1495.6.4 光谱分析工程向导153 5.6.5 光谱分析工作站154 5.7 傅里叶变换1565.7.1 快速傅里叶变换156 5.7.2 傅里叶变换编辑器157 5.7.3 傅里叶图像编辑158 5.7.4 傅里叶逆变换1685.7.5 傅里叶显示变换169 5.7.6 周期噪声去除1695.7.7 同态滤波1705.8 地形分析1715.8.1 坡度分析1715.8.2 坡向分析1715.8.3 高程分带1725.8.4 地形阴影1735.8.5 彩色地势1735.8.6 地形校正1755.8.7 栅格等高线1755.8.8 点视域分析1765.8.9 路径视域分析181 5.8.10 三维浮雕1825.8.11 高程转换1835.9 地理信息系统分析184 5.9.1 邻域分析1845.9.2 周长计算1865.9.3 查找分析1865.9.4 指标分析1875.9.5 叠加分析1885.9.6 矩阵分析1895.9.7 归纳分析1905.9.8 区域特征1905.10 实用分析功能191 5.10.1 变化检测1915.10.2 函数分析1925.10.3 代数运算1925.10.4 色彩聚类1935.10.5 高级色彩聚类194 5.10.6 数值调整1955.10.7 图像掩膜1965.10.8 图像退化197 5.10.9 去除坏线197 5.10.10 投影变换198 5.10.11 聚合处理199 5.10.12 形态学计算199第6章图像分类202 6.1 图像分类简介202 6.1.1 非监督分类202 6.1.2 监督分类2036.1.3 专家系统分类206 6.2 非监督分类2086.2.1 获取初始分类209 6.2.2 调整分类结果210 6.3 监督分类2126.3.1 定义分类模板213 6.3.2 评价分类模板221 6.3.3 执行监督分类226 6.3.4 评价分类结果227 6.4 分类后处理2316.4.1 聚类统计2326.4.2 过滤分析2326.4.3 去除分析2336.4.4 分类重编码2336.5 专家分类器2346.5.1 知识工程师2356.5.2 变量编辑器2396.5.3 建立知识库2426.5.4 知识分类器248第7章子像元分类2517.1 子像元分类简介2517.1.1 子像元分类的基本特征251 7.1.2 子像元分类的基本原理252 7.1.3 子像元分类的应用领域253 7.1.4 子像元分类模块概述254 7.2 子像元分类方法2567.2.1 子像元分类流程2567.2.2 图像质量确认2587.2.3 图像预处理2597.2.4 自动环境校正2607.2.5 分类特征提取2637.2.6 分类特征组合2697.2.7 分类特征评价2717.2.8 感兴趣物质分类2747.2.9 分类后处理2767.3 子像元分类实例2777.3.1 图像预处理2777.3.2 自动环境校正2777.3.3 分类特征提取2787.3.4 感兴趣物质分类2797.3.5 查看验证文件2817.3.6 分类结果比较282第8章矢量功能2838.1 空间数据概述2838.1.1 矢量数据2838.1.2 栅格数据2848.1.3 矢量和栅格数据结构比较285 8.1.4 矢量数据和栅格数据转换286 8.2 矢量模块功能简介2898.3 矢量图层基本操作2898.3.1 显示矢量图层2898.3.2 改变矢量特性2908.3.3 改变矢量符号2918.4 要素选取与查询2988.4.1 查看选择要素属性2988.4.2 多种工具选择要素2998.4.3 判别函数选择要素3008.4.4 显示矢量图层信息3028.5 创建矢量图层3038.5.1 创建矢量图层的基本方法303 8.5.2 由ASCII文件创建点图层307 8.5.3 镶嵌多边形矢量图层3088.5.4 创建矢量图层子集3108.6 矢量图层编辑3118.6.1 编辑矢量图层的基本方法311 8.6.2 变换矢量图层3138.6.3 产生多边形Label点3148.7 建立拓扑关系3148.7.1 Build矢量图层3158.7.2 Clean矢量图层3158.8 矢量图层管理3168.8.1 重命名矢量图层3168.8.2 复制矢量图层3178.8.3 删除矢量图层3178.8.4 导出矢量图层3188.9 矢量与栅格转换3188.9.1 栅格转换矢量3188.9.2 矢量转换栅格3208.10 表格数据管理3228.10.1 INFO表管理3228.10.2 区域属性统计3288.10.3 属性转换为注记329 8.11 Shapefile文件操作331 8.11.1 重新计算高程3318.11.2 投影变换操作332第9章雷达图像处理3349.1 雷达图像处理基础334 9.1.1 雷达图像增强处理334 9.1.2 雷达图像几何校正336 9.1.3 干涉雷达DEM提取336 9.2 雷达图像模块概述337 9.3 基本雷达图像处理337 9.3.1 斑点噪声压缩3389.3.2 边缘增强处理3409.3.3 雷达图像增强3419.3.4 图像纹理分析3449.3.5 图像亮度调整3459.3.6 图像斜距调整3469.4 正射雷达图像校正3479.4.1 正射雷达图像校正概述347 9.4.2 地理编码SAR图像3489.4.3 正射校正SAR图像3529.4.4 GCP正射较正SAR图像355 9.4.5 比较OrthoRadar校正效果358 9.5 雷达像对DEM提取3599.5.1 雷达像对DEM提取概述359 9.5.2 雷达立体像对数据准备359 9.5.3 立体像对提取DEM工程360 9.6 干涉雷达DEM提取3699.6.1 干涉雷达DEM提取概述369 9.6.2 干涉雷达图像数据准备369 9.6.3 干涉雷达DEM提取工程370 9.6.4 DEM高程生成3759.7 干涉雷达变化检测3769.7.1 干涉雷达变化检测模块376 9.7.2 干涉雷达变化检测操作377第10章虚拟地理信息系统381 10.1 VirtualGIS概述38110.2 VirtualGIS视窗38210.2.1 启动VirtualGIS视窗382 10.2.2 VirtualGIS视窗功能382 10.3 VirtualGIS工程38510.3.1 创建VirtualGIS工程385 10.3.2 编辑VirtualGIS视景387 10.4 VirtualGIS分析39110.4.1 洪水淹没分析39110.4.2 矢量图形分析39410.4.3 叠加文字注记39610.4.4 叠加三维模型39810.4.5 模拟雾气分析40510.4.6 威胁性与通视性分析406 10.4.7 立体视景操作40910.4.8 叠加标识图像41010.4.9 模拟云层分析41210.5 VirtualGIS导航41410.5.1 设置导航模式41410.5.2 VirtualGIS漫游415 10.6 VirtualGIS飞行41610.6.1 定义飞行路线41710.6.2 编辑飞行路线41910.6.3 执行飞行操作42010.7 三维动画制作42010.7.1 三维飞行记录42110.7.2 三维动画工具42210.8 虚拟世界编辑器42210.8.1 虚拟世界编辑器简介422 10.8.2 创建一个虚拟世界425 10.8.3 虚拟世界的空间操作429 10.9 空间视域分析43110.9.1 视域分析数据准备431 10.9.2 生成多层视域数据432 10.9.3 虚拟世界视域分析434 10.10 设置VirtualGIS默认值436 10.10.1 默认值设置环境436 10.10.2 默认值设置选项436 10.10.3 保存默认值设置439第11章空间建模工具44011.1 空间建模工具概述44011.1.1 空间建模工具的组成440 11.1.2 图形模型的基本类型441 11.1.3 图形模型的创建过程44111.2 模型生成器功能组成442 11.2.1 模型生成器菜单命令442 11.2.2 模型生成器工具图标443 11.2.3 模型生成器工具面板444 11.3 空间建模操作过程444 11.3.1 创建图形模型44411.3.2 注释图形模型44711.3.3 生成文本程序44811.3.4 打印图形模型44911.4 条件操作函数应用450第12章图像命令工具453 12.1 图像信息管理技术453 12.1.1 图像金字塔45312.1.2 图像世界文件45312.2 图像命令工具概述454 12.3 图像命令功能操作455 12.3.1 改变栅格图像类型455 12.3.2 计算图像统计值456 12.3.3 图像金字塔操作457 12.3.4 图像地图模式操作458 12.3.5 图像地图投影操作459。
基于ERDAS IMAGINE的遥感影像配准
基于ERDAS IMAGINE的遥感影像配准数字正射影像(DOM,Digital Orthophoto Map)是“4D”产品中比较重要的一种,是对航空(或航天)像片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的数字正射影像集。
由于DOM同时具有地图几何精度和影像特征,且精度高、信息丰富、直观真实、制作周期短,因此被广泛应用于洪水监测、农业估产、荒漠化监测等方面。
在DOM制作过程中,多光谱影像和全色影像的配准是其中重要的一个步骤,而目前最常用的平台就是ERDAS IMAGINE。
一、ERDAS IMAGINE简介ERDAS IMAGINE是美国ERDAS公司开发的遥感影像处理系统,自问世以来就以其先进的图像处理技术,友好、简洁的用户界面和操作方式,面向广阔应用领域的产品模块,服务于不同层次用户的模型开发工具以及高度的RS/GIS(遥感图像处理和地理信息系统)集成功能,为遥感和相关应用领域的用户提供了内容丰富、功能强大的图像处理工具,代表了遥感图像处理系统未来的发展趋势。
基于以上特点和优势,利用ERDAS IMAGINE可以方便、高效地实现遥感影像的几何纠正、镶嵌、配准等一系列功能。
二、影像配准在配准之前,首先要完成影像的格式转换,使用IM-PORT模块将影像转换为ERDAS 所需的IMG格式,然后根据SPOT影像的坐标参数,添加必要的投影信息和大地坐标,再通过直方图调整、灰度拉伸、锐化等方法对影像进行空间增强,改善影像的显示效果,这样就完成了影像数据配准前的预处理。
在ERDAS中打开对应的多光谱影像和标准SPOT影像,打开Geometric Correction,选择相应的DEM文件,并设定投影方式和带号后就可以开始配准了。
配准其实就是寻找两幅图上的同名点,即实地位置相同的点。
首先,要对两幅图像全面的浏览和观察,有一个整体的印象,掌握这个地区地貌的基本情况以及地物的分布特点,特别是要留意特征比较突出的地方,作为选点的重点区域;然后开始选择同名点,由于前三组点的选择十分重要,直接影响着后期的精度,因此要保证它们的误差尽量小。
基于同态滤波的遥感影像去云雾处理

第 3期
孙 芳 ,等 中国海域助航标志信息平台的设计与实现
57
5 结束语
中国海域助航标志信息平台从舰船航行安全及 航标数据资料实际应用出发 ,致力于提高航标信息 管理和服务水平 ,将实现航标数据自动更新维护 、航 标表电子出版 、海上助航标志信息的可视化操作 、数 字海图航标数据自动综合处理等全部功能 ,极大地 增强了航标信息内容的现势性 、准确性 、可靠性 。使 不同比例尺电子海图航标数据的统一性 、准确度以 及成图的速度 、质量都有较大的改进 。另外 ,中国海 域助航标志信息平台还将为数字海图与航海通告改 正系统 、航海信息电子助航系统提供基础航标数据 , 为建立全方位 、立体化的海上航行环境保障平台提 供最新航标信息 ,具有较高的应用价值 、良好的社会
5 结 论
图 2 滤波函数的横截面 。D ( u, v)是中心 变换后距原点的距离
4 试验分析
试验选取一幅 SPOT2全色影像 ,大小为 1 075 × 1 075 像素 ,处理平台为 ERDAS IMAGINE。 ERDAS IMAGINE是美国 ERDAS公司开发的遥感图像处理 系统 ,在遥感图像处理上 ,提供了傅里叶变换 、傅里 叶逆变换以及傅里叶变换编辑器等功能 。为实现较 好的去云效果 ,可以利用该系统提供的空间建模分 析 ( spatial modeler)模块设计出高级的空间分析模 型 ,实现复杂的分析和处理功能 。综上所述 ,利用 Model M aker设计同态滤波云雾去除的模型对图像 进行处理 。经过处理 ,有云雾的遥感图像得到了不 同程度的去除 ,图像模糊程度轻 ,噪声滤除的效果较 好 。图 3为实验效果图 ,由图中可看出 ,当 rL = 0. 9,
exp { r′( x, y) } = i0 x, y r0 x, y
ERDAS Imagine遥感图像处理方法
Hale Waihona Puke A11ERDAS Imagine遥感图像处理方法
1.3 ERDAS8.4功能体系
输入
栅格图像数据
矢量图形数据
文本属性数据
ERDAS IMAGINE遥感图像处理系统
视窗操作 空间建模 命令工具 批处理 图像库管理
数据输入输出
ERDAS Imagine遥感图像处理方法
ERDAS 8.4
遥感图像处理方法
A
1
ERDAS Imagine遥感图像处理方法
主要内容:
➢ ERDAS 8.4系统简介
➢ ERDAS 8.4视窗操作
➢ ERDAS 8.4数据处理
➢ ERDAS 8.4矢量功能
➢ ERDAS 8.4虚拟GIS
A
2
ERDAS Imagine遥感图像处理方法
A
4
ERDAS Imagine遥感图像处理方法
Essential级
完成二维/三维显示、数据输 入、排序与管理、地图配准、专题 制图以及简单的分析。
可扩充的模块:
(1)Vector模块 (2)Virtual GIS模块 (3) Developer’s Toolkit 模 块
A
5
ERDAS Imagine遥感图像处理方法
1.2 ERDAS8.4图标面板
图标
命令 IMAGINE Credits Start IMAGINE Viewer Import / Export Data Preparation Map Composer Image Interpreter Image Catalog Image Classification Spatial Modeler Radar Vector Virtual GIS A
《ERDAS IMAGE遥感图像处理方法》操作
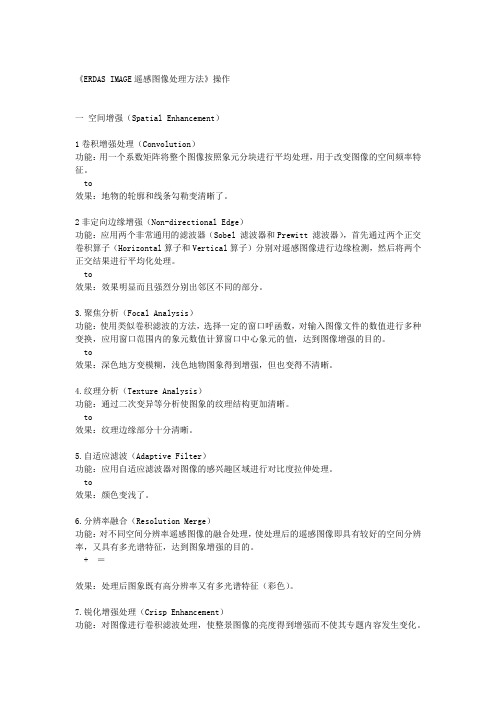
《ERDAS IMAGE遥感图像处理方法》操作一空间增强(Spatial Enhancement)1卷积增强处理(Convolution)功能:用一个系数矩阵将整个图像按照象元分块进行平均处理,用于改变图像的空间频率特征。
to效果:地物的轮廓和线条勾勒变清晰了。
2非定向边缘增强(Non-directional Edge)功能:应用两个非常通用的滤波器(Sobel 滤波器和Prewitt 滤波器),首先通过两个正交卷积算子(Horizontal算子和Vertical算子)分别对遥感图像进行边缘检测,然后将两个正交结果进行平均化处理。
to效果:效果明显而且强烈分别出邻区不同的部分。
3.聚焦分析(Focal Analysis)功能:使用类似卷积滤波的方法,选择一定的窗口呼函数,对输入图像文件的数值进行多种变换,应用窗口范围内的象元数值计算窗口中心象元的值,达到图像增强的目的。
to效果:深色地方变模糊,浅色地物图象得到增强,但也变得不清晰。
4.纹理分析(Texture Analysis)功能:通过二次变异等分析使图象的纹理结构更加清晰。
to效果:纹理边缘部分十分清晰。
5.自适应滤波(Adaptive Filter)功能:应用自适应滤波器对图像的感兴趣区域进行对比度拉伸处理。
to效果:颜色变浅了。
6.分辨率融合(Resolution Merge)功能:对不同空间分辨率遥感图像的融合处理,使处理后的遥感图像即具有较好的空间分辨率,又具有多光谱特征,达到图象增强的目的。
+ =效果:处理后图象既有高分辨率又有多光谱特征(彩色)。
7.锐化增强处理(Crisp Enhancement)功能:对图像进行卷积滤波处理,使整景图像的亮度得到增强而不使其专题内容发生变化。
效果:区别不大,亮度得到些许增强。
二.辐射增强(Radiometric Enhancement)1.查找表拉伸(LUT Stretch)功能:通过修改图像查找表使输出图像值发生变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ERDAS IMAGINE 的遥感图象去云方法赖格英1 刘春燕1 辜晓青2(1 江西师范大学城市与环境科学学院,南昌 330046 2 江西省气象科学研究所,南昌 330046)摘要 本文通过对遥感图象中薄云和地形云的不同特征,提出了不同的处理方法,针对薄云慢变化的空域特征,利用高通滤波进行薄云的去除;针对地形云的地形特征,通过数字地形模型(DEM ),对地形云进行去除。
在操作上,本文利用ERDAS IMAGINE 强大的图象处理建模功能和空间分析及操作功能,实现了遥感图象中上述云覆盖噪声的消除。
关键词:ERDAS IMAGINE 遥感图象 去云处理1 引言遥感图象中,云覆盖是最常见的噪音之一,在有限光谱分辨率的情况下,云覆盖噪声很难用多光谱的方法进行去除。
对于时间分辨率低的遥感平台来说,云覆盖是造成遥感数据缺乏的重要因素之一。
因此如何有效地减少或去除云的影响,是增加遥感数据有效率的一个重要途径,也是遥感图象预处理中的一个重要问题,江西省地处我国南方的亚热带地区,地形复杂,植被多样,云覆盖率极高。
在《江西省自然灾害遥感调查》课题中,干旱调查使用的遥感资料是NOAA/A VHRR 气象卫星资料,从国家卫星气象中心处检索1991年~1998年7月~9月的卫星资料,由于云雾的影响,获取的江西区域NOAA/A VHRR 数据平均有效率不足7%,因此,客观上要求我们对有些局部有云或大范围存在薄云的图象进行去云处理,才能满足实际需要。
云覆盖类型不同,去云的方法也不同。
例如夏季地形性云多半由于地形作用形成云体,滞留在较高的山体,反映在遥感图象上,这类噪音很难用时间平均的方法进行去除;而较大范围的薄云表现出慢变化的空域趋势,在频域上即具有低频的特征。
因此,本文针对不同云体的特征,利用图象处理的基本原理,以及ERDAS IMAGINE 强大的图象处理建模功能,对遥感图象中薄云和地形云的去除进行初步的探讨。
2 薄云的去除方法2.1 薄云去除的原理当云层较薄时,遥感卫星传感器所接收到的图象是由太阳辐射经云层反射部分及太阳辐射经地物或地面反射后再穿透云层这两部分组成,即:)),(1(),().,()],([),(y x t L y x t y x aLr y x Lr y x f −+==ϕ (1)其中,),(y x f 为传感器接收到的综合信息,),(y x r 为地物或地面反射率,代表信号,),(y x t 为云层的透射率,代表噪声,L 为太阳辐射强度,a 为太阳辐射在大气传输过程中的衰减系数,并且),(y x r 、),(y x t 和a 的数值位于0与1之间。
上式可以通过限定条件,简化成下式:),().,(),(y x f y x f y x f r i = (2)式中),(y x f i 为照射分量,反映了云的分布,),(y x f r 为反射分量。
因此,空域中影像的亮度值可看成是照射分量(),(y x f i )和反射分量(),(y x f r )的乘积。
通常,所有信息的反射分量都存在反射率的变化,并且是频域中的高频成分,而遥感中照射分量在整幅影像上除个别阴影区外一般差异较小,表现出慢变化的特征,与低频相联系,对式(2)两边取对数,则有:),(ln ),(ln ),(ln y x f y x f y x f r i += (3)该式表明影像亮度值的对数等于照射分量和反射分量的对数和,是一个低频成分的函数与一个高频成分的函数的迭加,因此,我们可以通过富立叶变换将它们转换到频域,即:)},({ln )},({ln )},({ln y x f F y x f F y x f F r i += (4)或记为:),(),(),(v u R v u I v u Z += (5)然后用高通滤波方法,提取高频,抑制低频,从而使占居低频成分的云的信息从影像信息中剔除出去,过程如下:),(),(),(),(),(),(),(v u R v u H v u I v u H v u Z v u H v u S +==再进行富立叶逆变换从频域回到空域:)},(),({)},(),({)},({),(111v u R v u H F v u I v u H F v u S F y x S −−−+==或记为:),('ln ),('ln ),(y x f y x f y x S r i +=其中,)},(),({),('ln 1v u I v u H F y x f i −=,)},(),({),('ln 1v u R v u H F y x f r −=最后将结果作指数变换:),(').,(')},('exp{ln )},('exp{ln )},(exp{),(y x f y x f y x f y x f y x S y x g r i r i =+==上述过程实质上是同态滤波的问题,同态滤波是影像亮度的非线性变换和高通滤波的结合。
薄云的去除效果取决于高通滤波时滤波函数),(v u H 的选择,薄云在空域中具有慢变化的特征,与频域中低频相联系,为此在干旱遥感调查中,选用了巴特沃思(Butterworth )滤波器,具体形式为:20]/),([11),(D v u D k v u H +=其中:0D 为截止频率,k 的选取是当0),(D v u D =时,22),(=v u H ,即414.0=k 。
2.2 在ERDAS IMAGEINE 下实现薄云的去除ERDAS IMAGINE 是美国ERDAS 公司开发的遥感图象处理系统,它具有先进的图象处理技术以及友好、灵活的用户界面和操作方式、面向广阔应用领域的产品模块、服务于不同层次用户的模型开发工具的诸多特点。
在遥感图象处理上,提供了富立叶变换、富立叶逆变换以及富立叶变换编辑器等功能。
同时,它为满足一般的用户级,也提供了通用的雾和噪声弱化、同态滤波器等功能。
但为实现较好的薄云去除效果,在干旱遥感调查中利用该系统提供的Spatial Modeler(空间建模分析)模块,对存在较大范围的薄云图象进行去云处理。
Spatial Modeler 是一个面向目标的图形模型语言,利用它,用户可设计出高级的空间分析模型,实现复杂的分析和处理功能,整个过程只需用其提供的工具在窗口中绘出模型的流程图、指定流程图的意义、所用参数、矩阵等,即可完成模型的设计,而毋需进行具体而复杂的编程过程,为用户提供了高层次的设计工具和手段,同时可使用户将更多的精力集中在专业领域的研究。
因此,根据上述的薄云去除原理,利用Model Maker,设计了薄云去除的模型:在不同的图象去云处理中,要进行个别的调整,主要在高通滤波过程中,应针对不同D。
图象中云的厚薄,选取不同的截止频率经过上述处理,有薄云的遥感图象得到了不同程度的去除,图象模糊程度轻,且滤除噪声的效果也不错。
3 地形云的去除地形云是由于地形抬升作用,在山体上空形成的云体,如我省井冈山附近夏季地形云的出现频率就极高。
由于高山上植被状况多半良好,且以林地为主,故在干旱遥感调查中,地形云的出现并不影响影像的使用,因为干旱遥感调查关注的焦点是耕地。
但为了获得比较好的图面表达效果,以及在分类过程中,不至于与其它信息混淆(一般地,云的植被指数和水体的植被指数极为接近),故在分类识别之前,应将地形云进行去除。
3.1 数字高程模型(DEM)的表面生成DEM是地形表面的一个数学(或数字)模型,根据不同数据集的不同表达方式,DEM 可以使用一个或多个数学函数来对地表进行表示,ERDAS IMAGINE 提供了实用的基于不规则三角网(Triangulated Irregular Network)的表面建模功能,因此,在干旱遥感调查中,根据1:25万等高线数字地形图,利用不规则三角网表面建模功能,生成1km×1km分辨率的DEM表面数据集,这个数据集和NOAA/A VHRR数据是匹配的。
3.2 利用DEM,在IMAGINE下进行去云处理利用生成的DEM数据集,根据ERDAS IMAGINE 的model maker 模块,建立去除地形云的模型,考虑到人类耕作活动一般在海拔500m以下,因此在海拔500m以上的区域,如出现负值的植被指数或非正常的植被指数,则加以纠正。
去除地形云的模型如下:4 结语1)本文从薄云的空域特征进行分析,利用图象处理的基本原理和ERDAS IMAGINE 强大的图象处理建模功能,对遥感图象中薄云的覆盖进行去除。
因此该方法无论对于NOAA/A VHRR 数据或陆地卫星(LandSat)TM数据都是适用的,因而它带有一定的普适性。
地形云的去除方法,只是针对干旱遥感调查这一特定问题而进行的,因为地形云对干旱的调查几乎没有影响,对它的去除,主要基于图面表达效果和分类中对某些数据存在干扰的考虑。
2)从除云的效果来看,薄云的去除有时会导致一些信息的丢失,这是由于在高通滤取得小一些;另外波中,在滤去低频成分时,也同时滤掉了一些有用的信息,为此应将D该方法主要适合于大范围存在薄云的遥感图象。
(第一作者简介:赖格英,男,1963年10生,理学硕士,副教授,从事遥感和地理信息系统的教学和科研。
)参考文献[1] Kenneth.R.Castleman . 数字图象处理 . 北京:电子工业出版社,1998年[2] 郭德方. 遥感图象的计算机处理和模式识别. 北京:电子工业出版社,1984年[3] Z. K. Liu and B. R. Hunt . A New Approach to Removing Cloud Cover from Satellite Image. CVIP,1984,25(2):45~53[4] 李志林,朱庆. 数字高程模型. 湖北武汉:武汉测绘科技大学出版社,2000年3月。