第三章 测量误差基本知识
测量学 测量误差基本知识
B 观测者的误差
C 测量误差
D 外界条件的变化
难度系数 c
若观测量的真值为X,观测值为li(i=1,2,…,n),其算术 平均值为L,则描述观测值的(真)误差的正确表达式是 (A )
A 观测值的(真)误差为 i= li -X; B 观测值的(真)误差为 i = X-L; C 观测值的(真)误差为 i = L-X; D 观测值的(真)误差为 i= li -X;
难度系数 A
L1、L2、L3为一组等精度观测值,其误差分别为-7mm, -2mm, +7mm,则它们的精度为( A )
A L1、L2、L3的精度相同; B L1最高、L3最低; C L3最高、L1最低; D L2最高、L1与L3相同 。
难度系数 B
丈量了D1、D2两段距离,其观测值及中误差分别为: D1=105.53m±0.05m,D2=54.60m±0.05m,这说明 ( A B ).
A D1和D2的中误差相同, B D1的相对精度高于D2的相对精度 C D1和D2的中误差不相同 D D1的相对精度低于D2的相对精度 E D1的相对精度与D2的相对精度相同。
难度系数 B
难度系数 B
精度指标
衡量精度的指标有:( A C D )
A 中误差
B 对中误差
C 相对误差
D 容许误差
E 偶然误差
难度系数 C
若水平角测量的中误差为6,则其极限误差可以取 值为( C E )
A 3
B 6
C 12
D 15
E 18
难度系数 C
观测值L1、L2为同一组等精度观测值,其含义是( C D E ) A L1、L2的真误差相等 B L1、L2的改正数相等 C L1、L2的中误差相等 D L1、L2的观测条件基本相同 E L1、L2服从同一种误差分布
测量误差的基本知识

名称:测量误差的基本知识一、基本概念1.真值:一个物理量的真实数值称为真值。
真值是难以准确测量的。
2.约写真值:足够接近真值的量,它与真值的差异可以忽略不计,称这个量为约定真值。
3.标称值:测量器具上标注的数值称为标称值。
4.示值:在测量过程中,测量仪器、仪表的指示值简称示值。
5.影响量:影响测量仪器示值的任何量称为影响量。
6.测量误差:表示测量数值与被测量真值之间的差异称为测量误差。
二、误差的来源1.仪器误差由于仪器本身及附件的电气和机械性能不完善而引入的误差2.使用误差由于仪器的安装、布置、调节不当所造成的误差。
3.影响误差由于受外界温度、湿度、电磁场、机械振动等影响超出仪器技术条件而造成的误差。
4.人身误差由于测量者的分辨能力、工作习惯及责任心等原因引起的误差。
5.方法和理论误差由于采用测量方法或仪表选择不当所造成的误差称为方法误差。
测量时,依据的理论不严格或用近似公式、近似值(例如π,√2,√3等)计算等造成的误差称理论误差。
三、测量误差的表示方法1.绝对误差指测量结果与被测量的真值之差,(因通常真值不能确定,实际上用的是约定真值,一般指被测量的算术平均值或标准值)表示为Δx=x-x0x—测量结果,x0—约定真值,Δx —绝对误差(Δx有大小和符号,其单位与测量结果的单位相同)另:与Δx的绝对值相等但符号相反的量称为修正值。
(用C表示)C=–Δx= x0–x通过检定(校准),由上级标准仪器给出受检仪器的修正值。
因此,将测得值与已知的修正值相加,即可算出被测量的约定真值:x0=x+c我厂仪器分内检和外检两种,检定结果若合格(兰色标签),所得修正值都在公司许可的误差内(这样才能判为合格),对使用者测量不会产生影响,故不再给出修正值,使用者可认为所用仪器的测量结果是准确的。
对于“准用”的仪器,请参照“准用证”旁的准用说明,对测量结果予以修正。
2.相对误差指测量结果的绝对误差:Δx与真值x0之比δx=Δx/x0×100%3.引用误差指计量器具的示值的绝对误差与器具的特定值x lim(如计量的上限值,量程)之比即:δx lim=Δx/x lim×100%一般x lim常指满度值,因此,也称满度相对误差,它是指仪器仪表度盘上最大的绝对误差与量程值(满度值)之比的百分数。
数字地形测量学课件第三章 测量误差基本知识
n n
标准差的计算式:
lim n
lim [2]
n
n
[] n
13
数字地形测量学 —— 教学课件
13
第三章 测量误差基本知识
§3.1 测量误差概念 §3.2 衡量精度的标准 §3.3 算术平均值及观测值的中误差 §3.4 误差传播定律 §3.5 加权平均值及其精度评定 §3.6 间接平差原理
14
抵偿性:当观测次数无限 增大时,由于正负相消, 偶然误差的平均值趋近于 零。用公式表示为:
三角形闭合差的频率直方图
lim 1 2 n lim [] 0
n
n
n n
12
数字地形测量学 —— 教学课件
12
§3.1 测量误差概念
正态分布曲线以及标准差和方差
在统计理论上如果观测次数无限增多(n→∞),而
0
0
0
0
0
181 0.505 177 0.495 358 1.000
数字地形测量学 —— 教学课件
11
§3.1 测量误差概念
偶然误差的特性
有限性:在有限次观测中, 偶然误差不超过一定数值;
渐降性:误差绝对值小的 出现的频率大,误差绝对 值大的出现的频率小;
对称性:绝对值相等的正 负误差频率大致相等;
三、极限误差
根据正态分布方程式,可以表示误差出现在微小区
间dΔ的概率:
p() f (Δ) d
1
e
2 2m2
d
2 m
数字地形测量学 —— 教学课件
18
§3.2 衡量精度的标准
将上式积分,得到偶然误差在任意大小区间中出
现的概率。设以k倍中误差作为区间,则在此区间中误
测量误差的基本知识
如经纬仪测角的照准误差 水准仪在水准尺上的估读误差
对358个三角形在相同的观测条件下观测了全 个三角形在相同的观测条件下观测了全 部内角,三角形内角和的真误差∆ 三角形内角 部内角,三角形内角和的真误差∆i=三角形内角 和测量值-180˚ 其结果如表 分析三角形内角和 其结果如表, 和测量值 的误差∆ 的规律。 的误差∆i的规律。
m L m =± ⋅ m = ± 站 ⋅ L = ±µ ⋅ L = ± L ⋅ m h km 站 S S
误差传播应用示例—角度测量 误差传播应用示例 角度测量
1、菲列罗公式—由三角形闭合差计算测角中误差 、菲列罗公式 由三角形闭合差计算测角中误差 设在三角网中等精度观测各三角形内角, 设在三角网中等精度观测各三角形内角,其测角中误差 均为mβ, 各三角形闭合差f i,闭合差的中误差mΣ为
三、容许误差
据偶然误差的第一特性: 据偶然误差的第一特性:在一定观测条件下偶然 误差的绝对值不会超过一定限值。 误差的绝对值不会超过一定限值。
P(−σ < ∆ < +σ) = 68.3% P(−2σ < ∆ < +2σ) = 95.5%
第三章 测量误差基本知识

Δ2 0 1 49 4 1 1 64 0 9 1 130
中误差 m 1
2 2 .7 n
2
3 .6
[例] 已知:七个三角形的闭合差f为:
-3″,-2″,8″,-5″,-2″,
5″,-9″
求:三角形闭合差的中误差mf 解:
f 180
其真值X应等于0。
二、观测值的改正值
观测值的改正值:算术平均值与观测值 之差称为观测值的改 v1 x l1 正数v。
v2 x l 2 .......... .... vn x l n
[ v ] n x [l ] [l ] [ v ] n [l ] 0 n
三、按观测值的改正值计算中误差
小结
一、已知真值X,则真 误差 一、真值不知,则
i X li
二、中误差
[l ] x n vi x li
二、中误差
[] m n
[vv] m n 1
白塞尔公式
二.用改正数v 计算算术平均值 (或然值)中误差Mx
算术平均值中误差为观测值的中误差 1 的 n 倍,即:
Байду номын сангаас
推导过程 设未知量的真值为X,可写出观测值的真 误差公式为: 1 X l1
2 X l2 .......... ....... n X ln
(i=1,2,…,n)
将上列等式相加: 1 2 n nX (l1 l2 ln )
所以:
2 ( X x)
n2
2
2 22 2n 2(1 2 1 3 n 1 n ) 1 2 n n2
工程测量第三章 测量误差基本知识
29
0.134
21
0.097
20
0.092
15
0.069
18
0.083
14
0.065
16
0.073
12
0.055
10
0.046
8
0.037
8
0.037
5
0.023
6
0.028
2
0.009
2
0.009
1
0.005
0
0
0
0
0
0
108
0.498
109
0.502
合 个 数k
59 41 33 30 22 16 11 4 1 0 217
i =1
误差分布曲线: 正态分布 N (0,σ 2 )
概率密度函数:
f (Δ) =
1
e−
Δ2 2σ 2
σ 2π
f (Δ)
方差:
σ
2
=
lim
Δ
2 1
+
Δ
2 2
+
n→∞
n
+
Δ
2 n
=
lim [Δ 2 ]
n→∞ n
标准差: σ = lim [ΔΔ]
n→∞ n
Δ
−σ
0
+σ
观测条件
误差分布
精度:一组观测值误差分布的密集或离散程度。
计 频 率 k/n
0.272 0.189 0.152 0.138 0.101 0.074 0.051 0.018 0.005
0 1.000
频率直方图
k/n dΔ
Δ
-27 -21 -15 -9 -3 0 +3 +9 +15 +21 +27
测量误差
mz k12mx21 k22mx22 kn2mx2n
第3章 测量误差
第3章 测量误差
3.4 误差传播定律
对n次等精度观测,算术平均值及线性函数的中误差分别为:
因为x是等l1精l度2n观测l,n 则mm 1=x m 2= 1 n … 2 =m m1 2 n =1 nm 2m ,2 2m 为 观 测1 n 值2m n 2 的中误差。由此得到按观测值的中误差计算算术平均值的中 误差的公式:
第3章 测量误差
第3章 测量误差 3.3 算术平均值及观测值的中误差
三、按观测值的改正值计算中误差 (白塞尔公式)
衡量观测精度的理想量是标准差,但实际工作中没有无限 次观测,故只能用中误差来代替标准差。
多数情况下,观测值的真值不可知,故真误差不可知,无 法求中误差。
实际计算为:对有限的n次观测值求算术平均值,由其计
第3章
3.4 误差传播定律
测量误差
因观测值含有误差,使得其函数受其影响也含有误差,称 为误差传播。
误差传播定律:反映观测值的中误差与观测值函数的中误 差之间关系的定律。
一、观测值的函数
1、和差函数 2、倍函数 3、线性函数 4、-般函数
z x 1 x 2 x n
zkx
z k 1 x 1 k 2 x 2 k n x n
( X x ) 2 [ ] 2 2 1 2 2 2 n 2 ( 1 2 1 3 1 2 )
n 2
n 2
n 2
第3章 测量误差
第3章 测量误差 3.3 算术平均值及观测值的中误差
因此可得: 按观测值的改正值计算中误差 ——白塞尔公式
m []m [vv]
n
n1
精度:反映一组观测值误差分布的密集或离散程度的数值。
测量误差基本知识

测量误差基本知识内容:了解测量误差来源及产⽣的原因;掌握系统误差和偶然误差的特点及其处理⽅法;理解精度评定的指标(中误差、相对误差、容许误差)的概念;了解误差传播定律的应⽤。
重点:系统误差和偶然误差的特点及其处理⽅法。
难点:中误差、相对误差、容许误差的概念;误差传播定律的应⽤。
§ 5.1 测量误差的概念 测量误差按其对测量结果影响的性质,可分为系统误差和偶然误差。
⼀、系统误差 (system error)1、定义:在相同观测条件下,对某量进⾏⼀系列观测,如误差出现符号和⼤⼩均相同或按⼀定的规律变化,这种误差称为系统误差。
2、特点:具有积累性,对测量结果的影响⼤,但可通过⼀般的改正或⽤⼀定的观测⽅法加以消除。
⼆、偶然误差 (accident error)1、定义:在相同观测条件下,对某量进⾏⼀系列观测,如误差出现符号和⼤⼩均不⼀定,这种误差称为偶然误差。
但具有⼀定的统计规律。
2、特点:(1)具有⼀定的范围。
(2)绝对值⼩的误差出现概率⼤。
(3)绝对值相等的正、负误差出现的概率相同。
(4)数学期限望等于零。
即:误差概率分布曲线呈正态分布,偶然误差要通过的⼀定的数学⽅法(测量平差)来处理。
此外,在测量⼯作中还要注意避免粗差 (gross error) (即:错误)的出现。
偶然误差分布频率直⽅图§ 5.2 衡量精度的指标 测量上常见的精度指标有:中误差、相对误差、极限误差。
⼀、中误差 ⽅差: —— 某量的真误差, [] ——求和符号。
规律:标准差估值(中误差 m )绝对值愈⼩,观测精度愈⾼。
在测量中,n为有限值,计算中误差 m 的⽅法,有:1、⽤真误差( true error )来确定中误差——适⽤于观测量真值已知时。
真误差Δ——观测值与其真值之差,有:标准差中误差(标准差估值), n 为观测值个数。
[ 例题 ] :对 10 个三⾓形的内⾓进⾏了观测,根据观测值中的偶然误差(三⾓形的⾓度闭合差,即真误差),计算其中误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m2 大,精度低
Δ
− m2
− m1
+ m1
+ m2
观测条件
误差分布
观测值精度
曲线形态(陡 峭、平缓)
具体的数值 σ (小、大)
观测精度 (高、低)
举
例
【例】同精度下对某一三角形进行了10次观测,求得每次观测所得 的三角形闭合差分别为(单位:″):+3,-2,-4,+2,0,-4, +3,+2,-3,-1。
+σ
−σ
1 f ( Δ ) dΔ = σ 2π
1 f ( Δ ) dΔ = σ 2π 1 f (Δ )dΔ = σ 2π
∫σ e
−
+σ
−
Δ2 2σ 2
Δ2 2σ 2
dΔ ≈ 0.683
d Δ ≈ 0 .955 d Δ ≈ 0 .997
∫ ∫
+ 2σ
− 2σ
∫ ∫
+ 2σ
−
− 2σ + 3σ
e
−
+ 3σ
m = ± [Δ Δ ] n [vv ] n -1
m = ±
(白塞尔公式)
Δ i = X − li , vi = x − li
两式分别相减得:
Δi = vi + ( X − x )
取其平方和,顾及[v]=0得
上式各取其总和,并顾及[v]=0,得
[Δ ] = [ν ] + n( X − x ) [Δ] X −x = n [Δ]2 Δ2 + Δ22 + ( X − x )2 = 2 = 1 n n2
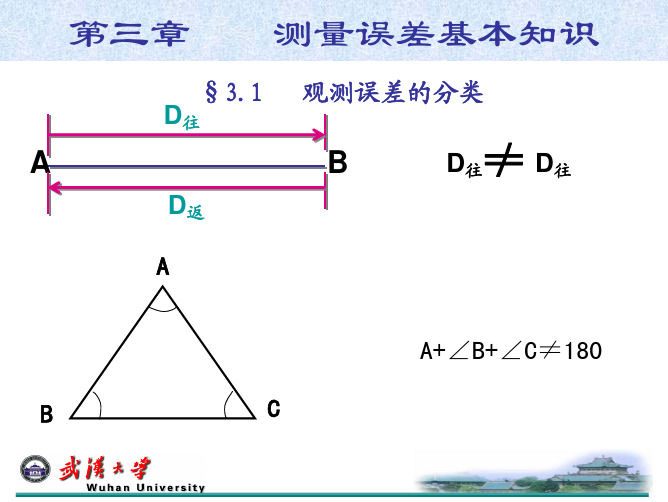
第三章
D往
测量误差基本知识
B
D往≠ D往
A
D返 Aห้องสมุดไป่ตู้
∠ A+∠B+∠C≠180
B
C
一、测量误差产生的原因
人(观测者) 仪器 外界环境 D 观 测 条 件
0
10
等精度观测:观测条件相同的各次观测,其结果具有相同精度。 不等精度观测:观测条件不同的各次观测,其结果具有不同精度。
二、测量误差的分类及处理原则 1、系统误差 2、偶然误差 3、粗差
Δ1Δ2 + Δ1Δ3 + lim n n→∞ + Δn−1Δn =0
[ΔΔ] = [vv] + 2[v]( X − x ) + n( X − x ) 2
[ΔΔ] = [vv] + n( X − x ) 2
+ Δ2n + 2(Δ1Δ 2 + Δ1Δ 3 + n2
2
+ ( Δ n−1Δ n )
[ ΔΔ ] (X − x) = n2
[Δ] lim =0 n →∞ n
算术平均值:
x=
L1 + L2 + n
Ln
=
[L] n
当观测次数无限增大时,观测值的算术平均值趋近该量的真值
二、观测值的改正值
vi = x − Li
[ v ] = nx − [ L ] = n [L] − [L] = 0 n
三、按观测值的改正值计算中误差
在相同的观测条件下对某一量进行多次观测,则观 测值为同精度观测值,其中误差为:
n个同精度观测值代数和的中误差,与观测值个数n 的平方根成正比。
2、倍数的函数
设有函数 z = k x z:观测值的函数,x为观测值,k为常数
已知mx ⇒ mz = ?
(1)真误差的关系式为: Δ z = kΔ x 若对x观测了n次则: Δ zi = kΔ xi (i = 1,2
n)
(2)将上式平方得: (3)求和,并除以n
[Δ] = 0 lim
n →∞
其中
n
[Δ] = Δ1 + Δ 2 +
+ Δn = ∑ Δi
i =1
n
误差分布曲线: 正态分布
f (Δ)
N (0, σ 2 )
概率密度函数:
方差:
Δ2 + Δ22 + ⋅ ⋅ ⋅ + Δ2n [Δ2 ] 1 = lim σ = lim n→∞ n→∞ n n
2
1 f ( Δ) = e σ 2π
2 z
Δ = k Δ (i = 1,2
[Δ ] =
n
2 zi
2 2 xi
n)
n)
k
2
[Δ ] ( i
2 x
(4 )转换为中误差关系式
2 即m z =
n
= 1,2 k 2m 2 x
m z = km x
观测值与常数乘积的中误差,等于观测值中误差乘以常数
例:用尺子在1:500的地图上量得两点间的 距离d=10cm,中误差md= ± 0.2cm,求其 相应的实地距离D及其中误差mD。
Δ i = 1 8 0 0 − ( L1 + L 2 + L 3 ) i
L1
L3 L2
三角形内角和真误差统计表 误差区间 d△ 0″~3″ 3″~6″ 6″~9″ 9″~12″ 12″~15″ 15″~18″ 18″~21″ 21″~24″ 24″~27″ 27″以上 合 计 正 个 数k 30 21 15 14 12 8 5 2 1 0 108 误 差 频 率 k/n 0.138 0.097 0.069 0.065 0.055 0.037 0.023 0.009 0.005 0 0.498 负 个 数k 29 20 18 16 10 8 6 2 0 0 109 误
偶然误差:在相同的观测条件下,对某一量进行一系列的观测, 如果误差出现的符号和数值大小都不相同,在表面上看没有任 何规律性;但就大量的误差而言,具有一定的统计规律。
D
9.5
10
Δ
• • •
0
1 9.4 2 9.7 3 9.5 0 4 9.6 5 9.3
6 9.2 0.3
7 9.6 -0.1
o
• •
应用倍数函数、和差函数的误差传播定律可得
2 2 2 2 2 m z = k1 m1 + k 2 m 2 +
三、偶然误差的统计特性
1.真值和真误差 真值:X 相同观测条件下进行n次观测,观测值:L1 L2 ···· Ln
真误差:真值X与观测值L之间的差值,用 △ 表示。
△i = X-Li
2.实例
三角形内角和真误差: 【例】在相同的观测条件下,观测了217个三角形的全部内角。
(i = 1,2,3,........217)
Δ2 − 2 2σ
标准差: σ = lim [ΔΔ]
n→∞
n
Δ
−σ
0
+σ
观测条件
误差分布
精度:一组观测值误差分布的密集或离散程度。
§3.2 衡量精度的标准
一、中误差
标准差 σ = lim
n→∞
[ΔΔ] n
中误差 是反映一组误差离散程度的指标。
ˆ m = ±σ = ±
[ΔΔ ] n
f (Δ )
m1小,精度高
Δ2 2σ 2
− 3σ
− 3σ
e
允许误差:
Δ 允 = 2m
§3.3 算术平均值及观测值的中误差
一、 算术平均值
在相同的观测条件下,对某个未知量观测了n 次,观测 值为L1,L2,…Ln,求该未知量的最或然值。 设未知量的真值为X,则观测值的真误差为:
Δ i = X − Li
[Δ ] [L] =X − n n
设有函数 z = x ± y z:观测值的函数,x、y为独立观测值 已知 m x 、 m y ⇒ m z = ? (1)真误差的关系式为: Δ z = Δ x ± Δ y 若对x、y观测了n次则: Δ z i = Δ x i ± Δ yi ( i = 1,2 (2)将上式平方得: (3)求和,并除以n
频率直方图
k/n dΔ
Δ
-27
-21 -24 -15 -18 -9 -12 -6 -3 0 +3 +9 +15 +21 +27 +6 +12 +18 +24
3.偶然误差的四个特性
有限性:在一定的观测条件下,偶然误差的绝对值不会超 过一定的限值; 集中性:绝对值较小的误差比绝对值较大的误差出现的 概率大; 对称性:绝对值相等的正误差和负误差出现的概率相同; 抵偿性:当观测次数无限增多时,偶然误差的算术平均值 趋近于零。即
Δ2 = Δ2 + Δ2y ± 2 Δ x i Δ y i ( i = 1, 2 zi xi i
n n n n
n)
n)
n)
[Δ2z ] = [Δ2x ] + [Δ2y ] ± 2 [Δ x Δ y ]( i = 1,2
2 2 2 mz = m x + m y
由于x , y为独立观测值,因此n趋近无穷时,[ΔxΔy] / n = 0
(4 )转换为中误差关系式
两观测值代数和的中误差,等于两观测值中误差的平方和
当z是一组观测值x1、x 2、 z = x1 ± x2 ± ± xn
2 2 2 mz = m x + m x + 1 2
x n的代数和时
2 + mx n n个观测值代数和的中误差,等于n个观测值中误差 的平方和。
当x1、x 2、 mz = m n x n为同精度观测值时 设其中误差为m
32 + 22 + 42 + 22 + 02 + 42 + 32 + 22 + 32 + 12 m=± 10 = ±2.7′′
另一台仪器的结果(单位:″):0,-1,-7,+2,+1, +1, 8, 0, +3,-1。