无刷直流电机闭环控制调速系统的设计
无刷直流电机调速系统的控制原理

无刷直流电机调速系统的控制原理下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
此文下载后可定制随意修改,请根据实际需要进行相应的调整和使用。
并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Downloaded tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The documents can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!无刷直流电机调速系统是一种能够实现精准控制电机转速的技术,它在工业生产和生活中有着广泛的应用。
无刷直流电机的调速与控制技术

无刷直流电机的调速与控制技术随着科技的发展,电动机在各个领域的应用越来越广泛。
而无刷直流电机作为一种高效、可靠的电机,在许多领域得到了广泛的应用。
无刷直流电机的调速与控制技术是保证电机运行稳定性和提高其性能的重要一环。
一、无刷直流电机的工作原理无刷直流电机是一种基于电磁感应原理工作的电动机。
其核心部件是电机转子上的永磁体,通过感应电流产生的磁场与定子线圈产生的磁场相互作用,从而实现电机的运转。
相比于传统的有刷直流电机,无刷直流电机省去了电刷与换向器件,因此具有更高的效率和更长的寿命。
二、无刷直流电机的调速方法无刷直流电机的调速方法主要包括电压控制调速和电流控制调速两种。
1. 电压控制调速电压控制调速是通过改变电压的大小来控制电机的转速。
在实际应用中,最常见的方式是采用PWM (Pulse Width Modulation) 调制技术。
PWM技术通过调整电压的占空比,使得电机在一个固定的周期内以不同的占空比工作,从而实现不同的转速。
这种方法简单易行,但是对于大功率的无刷直流电机,其调速范围较窄。
2. 电流控制调速电流控制调速是通过改变电机定子线圈的电流来控制电机的转速。
常见的控制方法有开环控制和闭环控制。
开环电流控制是在电机定子线圈中加回馈电阻,通过改变反馈电阻的大小来调整电流。
这种方法结构简单,控制参数易调,但是系统稳定性较差,无法适应负载的变化。
闭环电流控制是在开环控制的基础上加入反馈环节,通过传感器测量电机的电流,并与设定的电流进行比较,通过PID控制算法来调整控制器输出的电压,从而控制电机的转速。
这种方法可以提高系统的稳定性和动态响应性能,适用于对转速精度和系统稳定性要求较高的应用。
三、无刷直流电机的控制技术无刷直流电机的控制技术是实现电机调速的重要手段之一。
根据不同的应用场景和需求,可以选择不同的控制方法。
1. 速度控制速度控制是无刷直流电机最基本的控制方式。
通过改变电机的输入提速,可以控制电机的转速。
无刷电机PWM调速系统设计
生 PWM 信号,采集电机的驱动电流、电机端的反电
动 势 ,进 行 PID 运 算 ,构 成 反 馈 系 统 。 根 据 运 算 结
果,调整 PWM 信号,通过图腾柱电路将单片机的控
制信号放大、分隔,使其有足够的功率来开通或者关
断 MOS 管 ,以 获 得 准 确 的 控 制 信 号 ,稳 定 地 调 节 电
(Department of Electronic Engineering,Huizhou Technician Institute,Huizhou 516003,China)
Abstract: In order to solve the problem of whether the brushless motor can respond quickly and keep the
-125-
《电子设计工程》2021 年第 7 期
图 3 MOS 驱动电路
关响应,增加电机驱动的可靠性和安全性 [7-8] 。
当 MOS 管关断时,电机线圈可能会给造成 MOS
管 的 DC 击 穿 ,因 此 ,选 取 的 PMOS 需 要 在 内 部 集 成
一 个 二 极 管 ,该 系 统 选 取 ECH8660 芯 片 ,该 芯 片 在
应快的场合,常常难以达到要求。文中设计的双闭
实现设备的精密加工,提高产品质量的同时可以延
环调速系统通过对电机的反电动势、电流进行采样,
[1]
长设备寿命 。
收稿日期:2020-05-06
通过反电动势来确定电机的速度,通过检测驱动电
稿件编号:202005022
流确定电机功率,使单片机获得当前的电机运行参
= T
I d (s) - I L (s) T m s
无刷直流电机的电流闭环控制
无刷直流电机的电流闭环控制作者:赵念科来源:《数字技术与应用》2013年第03期摘要:分析了BLDCM的换相转矩脉动,指出了引起转矩脉动的主要原因是:关断相电流的下降速度大于开通相电流的上升速度,得到了减小电机低速运行时非换相电流脉动的方法,该方法的原理是令换相期间脉宽调制信号的占空比等于两倍的稳定运行时脉宽调制信号的占空比α1 (2α1=α法)。
在此基础上,提出了基于三相电流的相电流闭环控制。
指出只有三相电流控制才能有效控制相电流。
分别通过仿真验证了基于三相电流的相电流闭环控制能够有效的减小非换相电流的脉动。
关键词:BLDCM 相电流控制转矩脉动中图分类号:TM351 文献标7识码:A 文章编号:1007-9416(2013)03-0003-021 引言理想情况下,BLDCM的三相反电势是互差120°电角度的梯形波,该梯形波的平顶宽度为120°电角度,三相电流为互差120°电角度的矩形波,该矩形波的宽度也为120°电角度。
此时,BLDCM的输出转矩脉动较小。
但是,在实际情况中,反电势和相电流并非理想的梯形波和矩形波。
因此,根据转矩脉动产生的根源,可以将BLDCM的转矩脉动分为齿槽转矩脉动、斩波转矩脉动和换相转矩脉动三种[1]。
在BLDCM调速中,一般采用PWM技术[2]。
在采样控制理论中有一个重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
该原理称为面积等效原理,它是PWM控制技术的重要理论基础。
即通过一系列脉冲的宽度进行调制,来等效地获得所需要的电压波形,以改变施加在电机绕组上的相电压。
BLDCM的驱动器其实就是三相逆变器,PWM控制技术在逆变电路中的应用最广泛,对逆变器的影响也最深刻。
现在大量应用的逆变电路中,绝大部分都是PWM型逆变电路[3]。
不同的PWM开关状态将导致电机相绕组上施加不同的外加电压,不同的外加电压将产生不同的电流上升或下降速度,从而引起转矩随开关状态的变化而脉动,即斩波转矩脉动[4]。
基于MC33035+MC33039的直流无刷电机速度闭环控制系统设计

基于MC33035+MC33039的直流无刷电机速度闭环控制系统设计作者:应弋翔何嘉冰李沈崇史亦飞许宇翔来源:《科技创新与应用》2019年第24期摘; 要:文章详细介绍了Motorola公司的第二代直流无刷电机控制器专用芯片MC33035的基本原理,在分析了直流无刷电机的结构特点及应用现状后,设计了基于MC33035和MC33039及一些集成电路构成的小功率直流无刷电机的速度闭环控制系统,并进行了调试及试验,确认了其简单和优越的控制性能。
在设计的过程中加入了电机的过温保护,使无刷电机在实际工作环境中无故障安全运行。
关键词:MC33035;MC33039;直流无刷电机;闭环控制中图分类号:TM359.9 文献标识码:A 文章编号:2095-2945(2019)24-0049-04Abstract: In this paper, the basic principle of MC33035, a special chip for the second generation brushless DC motor controller made by Motorola Company, is introduced in detail. After analyzing the structure characteristics and application status of the brushless DC motor, the speed closed loop control system of low power brushless DC motor based on MC33035, MC33039 andsome integrated circuits is designed, debugged and tested, and its simple and superior control performance is confirmed. In the process of design, the overtemperature protection of the motor is added, so as to make the brushless motor operate safely without fault in the actual working environment.Keywords: MC33035; MC33039; brushless DC motor; closed-loop control 引言近年來,我国中小型电机和特微电机行业迅速发展,其中直流无刷电机以其高效低噪等特点逐渐取代有刷电机,成为行业的一颗新星。
直流无刷电机的控制系统设计方案
直流无刷电机的控制系统设计方案1 引言1.1 题目综述直流无刷电机是在有刷直流电机的基础上发展起来的,它不仅保留了有刷直流电机良好的调试性能,而且还克服了有刷直流电机机械换相带来的火花、噪声、无线电干扰、寿命短及制造成本高和维修困难等等的缺点。
与其它种类的电机相比它具有鲜明的特征:低噪声、体积小、散热性能好、调试性能好、控制灵活、高效率、长寿命等一系列优点。
基于这么多的优点无刷直流电机有了广泛的应用。
比如电动汽车的核心驱动部件、电动车门、汽车空调、雨刮刷、安全气囊;家用电器中的DVD、VCD、空调和冰箱的压缩机、洗衣机;办公领域的传真机、复印机、碎纸机等;工业领域的纺织机械、医疗、印刷机和数控机床等行业;水下机器人等等诸多应用[1]。
1.2 国内外研究状况目前,国内无刷直流电机的控制技术已经比较成熟,我国已经制定了GJB1863无刷直流电机通用规范。
外国的一些技术和中国的一些技术大体相当,美国和日本的相对比较先进。
当新型功率半导体器件:GTR、MOSFET、IGBT等的出现,以及钕铁硼、钐鈷等高性能永磁材料的出现,都为直流电机的应用奠定了坚实的基础。
近些年来,计算机和控制技术快速发展。
单片机、DSP、FPGA、CPLD等控制器被应用到了直流电机控制系统中,一些先进控制技术也同时被应用了到无刷直流电机控制系统中,这些发展都为直流电机的发展奠定了坚实的基础。
经过这么多年的发展,我国对无刷电机的控制已经有了很大的提高,但是与国外的技术相比还是相差很远,需要继续努力。
所以对无刷直流电机控制系统的研究学习仍是国内的重要研究内容[2]。
1.3 课题设计的主要内容本文以永磁方波无刷直流电机为控制对象,主要学习了电机的位置检测技术、电机的启动方法、调速控制策略等。
选定合适的方案,设计硬件电路并编写程序调试,最终设计了一套无位置传感器的无刷直流电机调速系统。
本课题涉及的技术概括如下:(1)学习直流无刷电机的基本结构、工作原理、数学模型等是学习电机的前提和首要内容。
直流电机闭环调速控制系统设计和实现

实验报告直流电机闭环调速控制系统设计和实现班级:姓名:学号:时间:指导老师:2012年6月一、实验目的1.了解闭环调速控制系统的构成。
2.熟悉PID 控制规律,并且用算法实现。
二、实验设备PC 机一台,TD-ACC+实验系统一套,i386EX 系统板一块三、实验原理根据上述系统方框图,硬件线路图可设计如下,图中画“○”的线需用户自行接好。
上图中,控制机算机的“DOUT0”表示386EX 的I/O 管脚P1.4,输出PWM 脉冲经驱动后控制直流电机,“IRQ7”表示386EX 内部主片8259 的7 号中断,用作测速中断。
实验中,用系统的数字量输出端口“DOUT0”来模拟产生 PMW 脉宽调制信号,构成系统的控制量,经驱动电路驱动后控制电机运转。
霍尔测速元件输出的脉冲信号记录电机转速构成反馈量。
在参数给定情况下,经PID 运算,电机可在控制量作用下,按给定转速闭环运转。
系统定时器定时1ms,作为系统采样基准时钟;测速中断用于测量电机转速。
直流电机闭环调速控制系统实验的参考程序流程图如下:四、实验步骤1.参照图 6.1-3 的流程图,编写实验程序,编译、链接。
2.按图6.1-2 接线,检查无误后开启设备电源,将编译链接好的程序装载到控制机中。
3.打开专用图形界面,运行程序,观察电机转速,分析其响应特性。
4.若不满意,改变参数:积分分离值Iband、比例系数KPP、积分系数KII、微分系数 KDD 的值后再观察其响应特性,选择一组较好的控制参数并记录下来。
5.注意:在程序调试过程中,有可能随时停止程序运行,此时DOUT0 的状态应保持上次的状态。
当DOUT0 为1 时,直流电机将停止转动;当DOUT0 为0 时,直流电机将全速转动,如果长时间让直流电机全速转动,可能会导致电机单元出现故障,所以在停止程序运行时,最好将连接DOUT0的排线拔掉或按系统复位键.五、心得体会此次实验是直流电机闭环调速控制系统的设计和实现,通过这次实验,让我了解了闭环调速控制系统的基本构成。
无刷直流电机闭环控制调速系统的设计
器蠡0一
落
拳
控制调速系统的设计
马健
1
、
黄 文新 ’
南京 航 空航 天 大 学 2 、天津航 空机 电有限公 司
所 需 的 三 相 方波 电流 。同时 M C 3 3 接 收 30 9 三 相 位 置 检 测信 号 ,经过 F V转 换 ,得 到 / 个 频 率 与 电机 转 速 成 正 比 的 脉 冲 信 号 , 经过 滤波 电路 后 形成 转速 反馈 信号送 给 M C 3 3 ,这 样 即 可构 成 无 刷 直 流 电 机 的 30 5 转 速 闭 环 控 制 系统 l 其 原 理 图 见 图 l 1 l 。 。 2 1核 心 控 制单 元 MC 33 . 305 M C 33 是 美 国MO R0 A公 司 研 305 T0 L 制的高性 能无刷直 流电机的专 用控制器 , 它 包 含 开 环 三 相 或 四 相 电 机控 制 所 需 的全 部 有 效 功能 。M C 3 3 内含 一 个 转 子 位 置 305 译 码 器 ,以 及 可 对 传 感 器 温 度 进行 补偿 的 参考 电平 ,同时还具 有一个频率可编程 的 锯齿波振荡器、一个完全可访 问的误差放 大 器 、 个脉 冲调 制 比 较 器 、 个 集 电极 开 一 三 路的顶端驱动器和三个非 常适 用于 驱动大 功 率 MO F T的 大 电流 推 挽 式 底 部 驱动 器 SE [1 2 因而 MC30 5 一 种 功 能 齐 全 的 电机 33 是 控 制 器 。 下 面 结 合 电路 原 理 图分 别 介 绍 MC 3 3 的 各 个 引 脚功 能 。 305 1 M C 3 3 的 第 3 是 正 向 /反 向输 ) 30 5 脚 入信号, 当其逻辑状态改变时 , 传感器信号 在译码 器内将原来 的逻辑状 态改变成非 , 再经译码后 , 得到反相序的换 向输 出, 电 使 机反向运转 。 2 第4 5 6 ) , , 脚接收 电机的三相位 置检 测 信号 ,M C 33 经过 内部 的 芯 片译 码 电 305 路 监 测 这 三 个输 入信 号 , 提供 一 个 合适 序
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
越快。实验中,先给定一个速度,得到 MC33035下桥臂的驱动信号,然后调节电 位器使阻值减小,这时町观察到如图2ee的 下部波形。由图可见,当速度减小时, MC33035下桥臂的驱动信号输出脉冲变 窄,以使MOSFET的导通时间减少,这样, 电机绕组的平均电压将降低,电机的转速 下降。
列的上桥和下桥的输出信号。MC33035的 输入端4、5、6都设有-卜拉电阻,输入电平 与TTL电平兼容,门槛电压为2.2V。 MC33035适用于传感器相位差为60。、120 。、240。、300。四种情况的三相无刷电动 机。由于3个输入逻辑信号共有8种逻辑组 合,其中6种正常状态决定r电动机6个不 同位置状态,其余2种组合对应F位置传感 的不正常状态,即3个信号线开路或对地短 路状态,此时脚14将输出故障信号(低电 平)。
i下转第159页争妒毒
2无刷直流电机的速度闭环控制系
统的设计
由本文设计的无刷直流电机的速度闭 环控制系统,控制一台i相删极电机。 MC33035接收霍尔位置传感器送来的三相 位置检测信号,经芯片内部泽码电路并结 合正反转控制信号、启停控制信号、制动信 号,经过运算后,产生6路控制信号送到6 个功率开关器件,使其产生电机正常运行
2.3工艺优化及组织性能检测 根据热模拟试验冷却速度与组织关系 的分析结果以及工业试验终轧温度和吐丝 温度对组织的影响规律可知:800。C左右终 轧+750"C左右吐丝+合适的冷却速度可以 得到网状碳化物少的细片状珠光体组织。 因此结合现场设备的实际能力,在宝钢特
表3试验钢组织性能检验结果
}碳化物 l州状
3)MC33035的振荡频率由RT和CT来 确定,本文选用PWM频率为24KHz,RT 和CT分别选择5.1 K和0.01 U,接入 MC33035的第8脚和第10脚。
4)设计利用MC33035芯片内部的一个 独立运放构成速度PI调节器,实现速度闭 环控制。速度输入信号由MC33035的11脚 输入,输入反馈信号由MC33039得到,本 文设计的放人器增益为lO。
3结论
1)适当提高冷却速度,可得到细片状 的珠光体组织,但冷却速度必须控制在15 ℃/s以下,以免出现粗人的类珠光体组织。
2)分析了终轧温度对GCrl 5轴承钢网 状碳化物析出的影响规律,终轧温度为800 ℃时网状碳化物的析出量最少,终轧温度 为750"C时网状碳化物的析出量有所增加。
3)珠光体片层l’日J距随吐丝温度或终轧 温度的升高而减小,相对于冷却速度来说, 它们的影响是较小的。
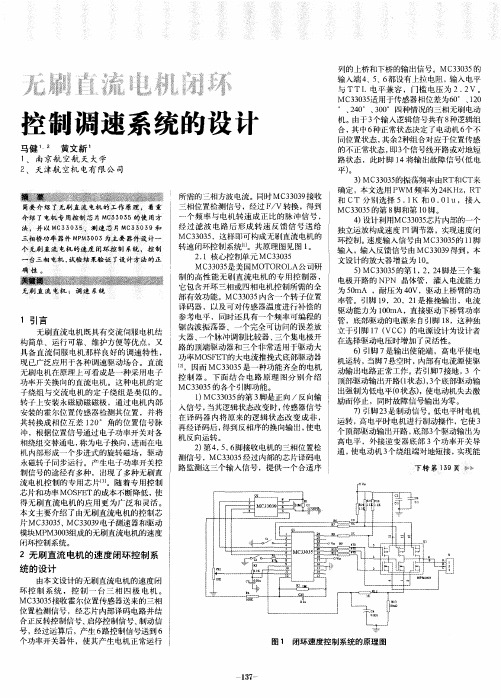
图1 闭环速度控制系统的原理图
万方数据
137一
物仍有一部分以网状形式出现。因此,终轧 温度在800℃左右时为宜。
2。2珠光体片层间距影响因素分析 热模拟试验中以不同冷却速度冷却时 得到的试验钢珠光体SEM形貌如图2所示。 由图可见:当冷却速度小于15"C/s时,随 着冷却速度的增加,珠光体片层变薄。主要 原因是随着冷却速度的增加,奥氏体转变 为珠光体的温度逐渐降低,转变时的过冷 度不断增大,相变的速度非常快,碳原子不 能进行长程扩散,因而导致了珠光体片层 变瘴,当冷却速度等于15℃/s时,珠光体 片层变得肥厚松散,有些文献称之为类珠 光体组织,它是由奥氏体片和M23C6碳化 物片组成的一种片层相间的组织15I。 工业试验钢的珠光体SEM形貌如图3 所示。由图可以看出:a和b试验钢的珠光 体片较细小,c和d试验钢的珠光体片较粗
无劂直流电机闭环
控制调速系统的设计
马健1’2黄文新1 1、南京航空航天大学 2、天津航空机电有限公司
籀妻”蝴攀嬲豫淤端戮滞淞蹲端獬释嚣嘲
简要介绍了无刷直流电机的工作原理,着重 介绍了电机专用控制芯片Mc55055的使用方 珐,并以Mc5 5 0 55、测速芯片Mc3 50 5 g和 三相桥功率器件MPM5005为主要嚣件设计一 个无刷直流电机的速度闭环控制系统,控削 一台三相电机,试验结果验证了设计方法的正 确性。
参考文献铡搿孵帮辩嬲嘲攀荆谬骥
【1】叶慧丽,李国忠,惠荣,等.轧制工艺 对C,-O'15球化退火的影响[J】.材料热处理. 2007',56(6):50—51. 【2】钟顺思,王昌生.轴承钢[M】.北京:冶‘ 金工业出版社.2000. 【5】王东兴,肖攸毅.连轧Gcrl5轴承钢的 控轧控冷工艺[J】.特殊钢.2004,25(5);
4结论
通过实验证明,本文所设计的基于 MC33035的无刷直流电机控制系统具有电 路简单,易于调试,价格经济,抗干扰性强, 可靠性高,稳定性好等优点。可满足无刷 直流电机一般应用场合的驱动要求。
爹考文献“8”鬻嬲燃、蛳…好’ 一
(1】杨国良.无刷直流电机控制系统中的专
用控制芯片及其应用设计[J】.电子元器件
》∈键词 ‘磁‘:、、、:j?”≯夸≮≤慧j蕞o:李移≤毫潮
无刷直流电机;调速系统
1引言
构简单 无、 刷 运 直行 流可 电机 靠既 、具 维有 护交 方流 便伺 等服 优电点机,结又
具备直流伺服电机那样良好的调速特性, 现已广泛应用j:各种调速驱动场合。直流 无刷电机在原理上可看成是一种采用电子 功率开关换向的直流电机。这种电机的定 子绕组与交流电机的定子绕组是类似的。 转子上安装永磁励磁磁极,通过电机内部 安装的霍尔位置传感器检测其位置,并将 其转换成相位互差1 20。角的位置信号脉 冲,根据位置信号通过电子功率开关对各 相绕组交替通电,称为电子换向,进而在电 机内部形成一个步进式的旋转磁场,驱动 永磁转了.同步运行。产生电子功率开关控 制信号的途径有多种,出现了多种无刷直 流电机控制的专用芯片13I。随着专用控制 芯片和功率MOSFET的成本不断降低,使 得无刷直流电机的应用更为广泛和灵活。 本文主要介绍了由无刷直流电机的控制芯 片MC33035、MC33039电了.测速器和驱动 模块MPM3003组成的无刷直流电机的速度 闭环控制系统。
大。其原因为:在较高温度下终轧或者在较 高温度下吐丝,将有利于发生更大程度的 动态回复与动态再结晶或者静态同复与静 态再结晶,使奥氏体的畸变程度减小,即奥 氏体向渗碳体/珠光体的相变驱动力减小, 由奥氏体向珠光体转变在较低的温度下发 生,从而使珠光体片层间距减小16.7】。同时 由图2可知,对珠光体片层间距影响最大的 是冷却速度,因此珠光体片层间距应主要 由冷却速度控制,同时为了减少网状碳化 物的析出,吐丝温度应控制在750"C左右。
2.0
热轧材{It扣强 度(Mpa) 748
避火M抗扣强:热轧村断裂
/受(MPa) {仲K率(呦
662
ห้องสมุดไป่ตู้
22
越火¨断裂
伸K率(呦
32
热轧村新桶 收缩;}(%)
56 9
退火劓断l晡 收缩率(%)
62.8
图3试验钢在不同吐丝温度下的SDd显微组织
钢分公司进行了控轧控冷工艺试验,轧制 规格为巾12mm的盘条。并对优化工艺的试 验钢进行显微组织及力学性能检测,结果 如表3所示。由表3可见,在优化控轧控冷 工艺条件下生产的产品的组织及力学性能 均满足GB/T18254—2002标准要求。
6)引脚7是输出使能端,高电平使电 机运转,当脚7悬空时,内部有电流源使驱 动输出电路JF常J二作。若引脚7接地,3个 顶部驱动输出开路(1状态),3个底部驱动输 出强制为低电平(0状态),使电动机失去激 励而停止,同时故障信号输出为零。
7)引脚23是制动信号。低电平时电机 运转,高电平时电机进行制动操作,它使3 个顶部驱动输出开路,底部3个驱动输出为 高电平,外接逆变器底部3个功率开关导 通,使电动机3个绕组端对地短接,实现能
所需的三相方波电流。同时MC33039接收 三相位置检测信号,经过F/V转换,得到 一个频率与电机转速成正比的脉冲信号, 经过滤波电路后形成转速反馈信号送给 MC33035,这样即可构成无刷直流电机的 转速闭环控制系统nI。其原理图见图l。
2.1核心控制单元MC33035 MC33035是荚国MOTOROLA公司研 制的高性能无刷直流电机的专用控制器, 它包含开环_三相或四相电机控制所需的全 部有效功能。MC33035内含一个转子位置 译码器,以及可对传感器温度进行补偿的 参考电平,同时还具有一个频率可编程的 锯齿波振荡器、一个完全可访问的误差放 大器、一个脉冲调制比较器、三个集电极开 路的顶端驱动器和_三个非常适用j:驱动大 功率MOSFET的大电流推挽式底部驱动器 12l,因而MC33035是一种功能齐全的电机 控制器。下面结合电路原理图分别介绍 MC33035的各个引脚功能。 1)MC33035的第3脚是正向/反向输 入信号,当其逻辑状态改变时,传感器信号 在译码器内将原来的逻辑状态改变成非, 再经译码后,得到反相序的换向输出,使电 机反向运转。 2)第4,5,6脚接收电机的i相位置检 测信号,MC33035经过内部的芯片译码电 路监测这三个输入信号,提供一个合适序
图2
1、2,3脚接受位置传感器三个信号, 经F/V变换成正比于电机转速的电压信 号,并将该信号反馈给控制器MC33035,即 可形成转速闭环控制。
3样机实验 本实验中,电机中用3个霍尔集成电路
作转子位置传感器。用MC33035的脚8参 考电压作为电源(6.24V)。霍尔集成电路 的输出信号送到MC33039和MC33035.实 验中采用的电机为三相|,q极的,所以电机 每转一圈,MC33039的引脚5应输出的脉 冲数是3X4=12个脉冲。按照电机最高转速 为5000r/min,相当于83r/s,这样每秒输 出脉冲数为83X12=996个脉冲,即频率约 为1000Hz,因此定时元件选用R为lM,C 为750pF。
应用.2007.2
【2]张琛.直流无刷电动机原理及应用[M】.