基于uCCOS的直流电机PID转速闭环调速控制系统Proteus仿真实现…
0实验一:转速负反馈闭环调速系统仿真框图及参数
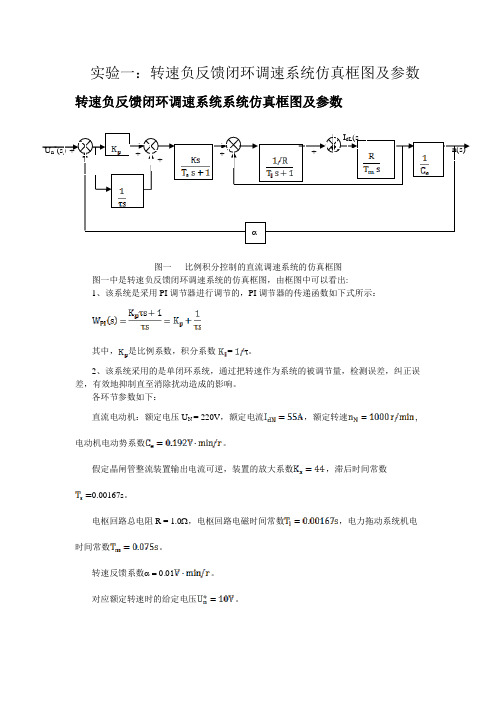
实验一:转速负反馈闭环调速系统仿真框图及参数转速负反馈闭环调速系统系统仿真框图及参数图一比例积分控制的直流调速系统的仿真框图图一中是转速负反馈闭环调速系统的仿真框图,由框图中可以看出:1、该系统是采用PI调节器进行调节的,PI调节器的传递函数如下式所示:其中,是比例系数,积分系数=。
2、该系统采用的是单闭环系统,通过把转速作为系统的被调节量,检测误差,纠正误差,有效地抑制直至消除扰动造成的影响。
各环节参数如下:直流电动机:额定电压U N = 220V,额定电流,额定转速,电动机电动势系数。
假定晶闸管整流装置输出电流可逆,装置的放大系数,滞后时间常数0.00167s。
电枢回路总电阻R = 1.0Ω,电枢回路电磁时间常数,电力拖动系统机电时间常数。
转速反馈系数α = 0.01。
对应额定转速时的给定电压。
αU n*(s) + +++ +---I dL(s) n(s)转速负反馈闭环调速系统的仿真1.仿真模型的建立比例积分控制的无静差直流调速系统的仿真模型进入MATLAB,并打开SIMULINK模块浏览器窗口,建立一个新的模型,并复制入相应模块,修改模块的参数.当其中PI调节器的至暂定为,1/τ = 11.43时,把从10.0修改为0.6后控制参数的仿真结果:图1 电枢电流随时间变化的规律图2电机转速随时间变化的规律由图1可知电流的最大值为230A左右,显然不满足实际要求,故后面需对此进行处理,采用带电流截止负反馈环节的直流调速系统。
其中,由图2 scope输出结果中可以得出该控制系统的最大超调量M p、上升时间,调整时间,取值分别为:M p = 108r/min, = 0.12s, = 0.28s(估计值)2.PI调节器参数的调整改变PI调节器的参数,并在启动仿真,分别从仿真曲线中得到的最大超调量及调整时间,相互间进行比较,如下表所示比例系数积分系数最大超调量M p(r/min)调整时间(s)0.25 3 0 >0.60.56 3 0 >0.60.56 11.43 108 0.280.8 11.43 63 0.280.8 15 152 0.23由表中可以看出,改变PI调节器的参数,可以得到转速响应的超调量不一样、调节时间不一样的响应曲线。
基于Proteus仿真的直流电机控制

前言 (1)正文 (1)2.1 设计目的和意义 (1)2.1.1 设计目的 (1)2.1.2 设计意义 (1)2.2 设计方法 (1)2.3设计内容 (2)2.3.1 89C51单片机介绍 (2)2.3.2内容概要 (3)2.4电路分析 (3)2.4.1程序流程图 (3)2.4.2元件清单 (4)2.4.3程序电路图 (5)2.4.4程序运行结果 (5)2.4.5 Proteus调试与仿真 (5)结论 (6)总结 (7)参考文献 (8)直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂.功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。
随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。
采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。
正文2.1 设计目的和意义2.1.1 设计目的作为理工科的学生应该在学习与动手实践中提高自己的专业技能知识,通过课程设计使我进一步熟悉了单片机的内部结构和工作原理,掌握了单片机应用系统设计的基本方法和步骤;通过利用AT89C52单片机,理解单片机在自动化装置中的作用以及掌握单片机的编程调试方法;通过设计一个简单的实际应用输入控制及显示系统,掌握protues和Wave以及各种仿真软件的使用。
现在的学习都是为以后的发展而做铺垫,通过课程设计提高自己的动手能力。
2.1.2 设计意义加深理解直流电机在单片机上的运用,增进对电路仿真的兴趣。
2.2 设计方法定义输出或输入为直流电能的旋转电机,称为直流电机,它是能实现直流电能和机械能互相转换的电机。
基于Proteus的直流电机闭环调速系统设计
摘要在工业自动控制系统和各种智能产品中常常会用用电动机进行驱动、传动和控制,而现代智能控制系统中,对电机的控制要求越来越精确和迅速,对环境的适应要求越来越高。
本设计以AT89C51单片机为核心,基于Proteus单片机仿真软件,完成了直流电机的转速自动测量及转速调节功能。
在设计中采用PWM技术和PID控制技术对电机进行控制,并且利用数码管设计的人机界面系统显示转速的设定值及实际值,通过应用PID算法对占空比的计算达到精确调速的目的。
还利用了Visual Basic6.0编程软件编写了一个简单的上位机软件,显示实际转速的变化情况,对PID参数的整定提供依据。
关键词:Proteus,AT89C51,PID,PWM调速,Visual Basic 6.0目录第一章绪论 (1)1.1 直流电机闭环调速系统背景 (1)1.2 本设计实现的基本功能 (1)1.3设计目的及意义 (1)第二章总体规划 (2)2.1 直流电机控制原理及特点 (2)2.2 直流电机调速控制方式选择 (2)2.3 PWM脉宽调制方式 (3)2.4 电机实际转速的获取 (3)2.5总体设计框图 (4)2.6 上位机界面设计 (4)第三章硬件设计 (5)3.1 AT89C52芯片介绍 (6)3.2 电机驱动电路设计 (7)3.3 按键模块设计 (7)3.4 数码管显示模块设计 (8)3.5 串口电路设计 (8)第四章软件设计 (9)4.1 主程序 (9)4.2 定时器0中断服务程序 (10)4.3 PID控制输出程序 (10)第五章硬件与软件联合调试5.1 运行时速度设定值与实际值 (12)5.2 运行时直流电机转动情况 (12)5.3 运行时上位机运行情况 (12)参考文献 (13)致谢 (14)附录 (15)第一章绪论1.1直流电机闭环调速系统背景对直流电机转速的控制即可采用开环控制,也可采用闭环控制。
与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范围可以大大提高。
《protel应用》课程设计基于pid算法的直流电机闭环调速系统【全套图纸】
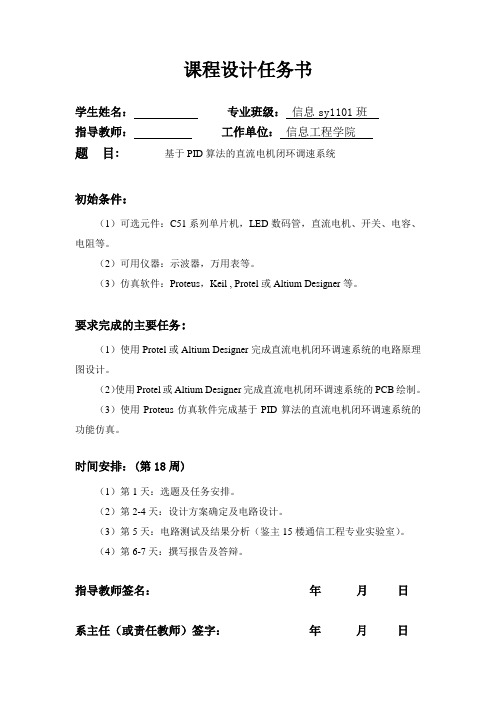
课程设计任务书学生姓名:专业班级:信息sy1101班指导教师:工作单位:信息工程学院题目:基于PID算法的直流电机闭环调速系统初始条件:(1)可选元件:C51系列单片机,LED数码管,直流电机、开关、电容、电阻等。
(2)可用仪器:示波器,万用表等。
(3)仿真软件:Proteus,Keil , Protel或Altium Designer等。
要求完成的主要任务:(1)使用Protel或Altium Designer完成直流电机闭环调速系统的电路原理图设计。
(2)使用Protel或Altium Designer完成直流电机闭环调速系统的PCB绘制。
(3)使用Proteus仿真软件完成基于PID算法的直流电机闭环调速系统的功能仿真。
时间安排:(第18周)(1)第1天:选题及任务安排。
(2)第2-4天:设计方案确定及电路设计。
(3)第5天:电路测试及结果分析(鉴主15楼通信工程专业实验室)。
(4)第6-7天:撰写报告及答辩。
指导教师签名:年月日系主任(或责任教师)签字:年月日摘要本系统以STC89C52单片机为核心,采用PWM技术和PID控制算法对电机进行控制,完成了直流电机的转速自动测量及转速自动调节功能。
在本系统中,数码管模块实时显示直流电机转速的设定值及瞬时值,STC89C52单片机通过虚拟串口向虚拟示波器发送数据,达到实时显示电机转速曲线的目的,为PID参数的整定提供依据。
本系统采用当前流行的PCB绘图软件Altium Designer进行硬件电路原理图的设计及其PCB绘制,并且由Proteus仿真软件完成了整个系统的仿真,证实了本设计的可行性。
关键词:STC89C52;PWM;PID算法;直流电机;PCB;仿真全套完整版设计,加153893706AbstractIn the system, STC89C52 microcontroller is used as the core, and PWM technology and PID control algorithm are adopted to control the DC motor, finally, the function of automatic speed measurement and regulating are achieved. The setting value and instantaneous value of DC motor speed are also displayed on the digital tube , and STC89C52 microcontroller sends data to the virtual oscilloscope to display the motor instantaneous speed curve through virtual serial port .Altium Designer, which is regarded as a current popular PCB drawing software, is used to drawing the hardware circuit schematic and PCB in the designing. We also use Proteus software to complete the simulation of the entire system. By analyzing the simulation results, feasibility of this design is confirmed.Key words: STC89C52; PWM; PID algorithm; DC motor; PCB; Simulation目录摘要 (I)Abstract (II)目录 (I)1引言 (1)1.1直流电机闭环调速系统背景 (1)1.2本设计实现的基本功能 (2)2 设计方案 (3)2.1系统整体方案 (3)2.2控制器模块设计方案 (3)2.3电机驱动模块设计方案 (4)2.4电机转速获取方案 (4)2.5显示模块设计方案 (5)3 硬件电路设计 (6)3.1 STC89C52单片机最小系统电路 (6)3.2 STC89C52单片机串口通信电路 (7)3.3 USB供电电路 (7)3.4按键与反相器电路 (8)3.5数码管显示电路 (8)3.6 L298电机驱动电路 (9)4 软件设计 (9)4.1 PID算法概述 (10)4.1.1模拟PID (10)4.1.2数字PID (11)4.1.3数字PID参数确定方法 (13)4.2主程序 (14)4.3定时器0中断服务程序 (15)4.4 PID控制输出程序 (15)5 Altium Designer PCB绘制 (17)5.1Altium Designer简介 (17)5.2PCB板设计流程 (18)5.3PCB绘制相关规则 (19)5.3.1元件布局规则 (19)5.3.2 PCB布线规则 (19)5.4PCB展示 (20)5.4.1 STC89C52单片机模块 (20)5.4.2数码管显示模块 (21)5.4.3 L298电机驱动模块 (22)6 仿真分析 (24)7 心得体会 (25)参考文献 (26)附录一 (27)附录二 (29)附录三 (30)1引言1.1直流电机闭环调速系统背景直流电机调速是指人为地或自动地改变直流电机的转速,以满足工作机械的要求。
PROTUES课程设计-直流电动机调速器-单片机89C51-Keil---Proteus

1 引言随着微电子技术的不断发展与进步,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
在现代工业中,直流电动机作为电能转换的传动装置,被广泛应用于机械、冶金、石油、化工、国防等工业部门中。
直流电动机是将直流电能转换为机械能的电动机。
因其良好的调速性能而在电力拖动中得到广泛应用。
随着对生产工艺、产品质量的要求不断提高和产量的增长,越来越多的生产机械要求能实现自动调速。
直流调速系统的发展得力于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术和微机应用技术的最新发展成就。
正是这些技术的进步使直流调速系统发生翻天覆地的变化。
其中电机的控制部分已经由模拟控制逐渐让位于以单片机为主的微处理器控制,形成数字与模拟的混合控制系统和纯数字控制系统,并向全数字控制方向快速发展。
本文设计了用DAC0808设计直流电动机调速器的基本方案,阐述了该调速器系统的基本结构、工作原理、运行特性及其设计方法。
本系统用电压表测量直流电动机的转速,用MCS-51单片机输出数字信号通过DAC0808芯片实现数模转换,从而输出模拟电压来控制调节直流电动机的转速。
本设计主要研究利用单片机及DAC0808实现数模转换调速,直流电机的控制和测量方法,从而对直流电机的调速控制精度、响应速度以及节约能源等都具有重要意义。
2 设计总体方案2.1 设计要求基本要求:使用AT89C51单片机为核心,使用数模转换元件DAC0808对单片机输出的数字信号进行转换,输出模拟信号驱动直流电动机。
具体要求:在设计中,设计8个按键对应直流电动机的8挡不同转速,按下不同按键时,电动机将以不同速度转动,在8个按键中取一个按键为直流电动机转动停止按键。
8挡不同转速的设定由学生自己决定。
仿真:控制程序在Keil软件中编写,编译,整个控制电路在Proteus仿真软件中连接调示。
51系列单片机直流电机闭环调速实验
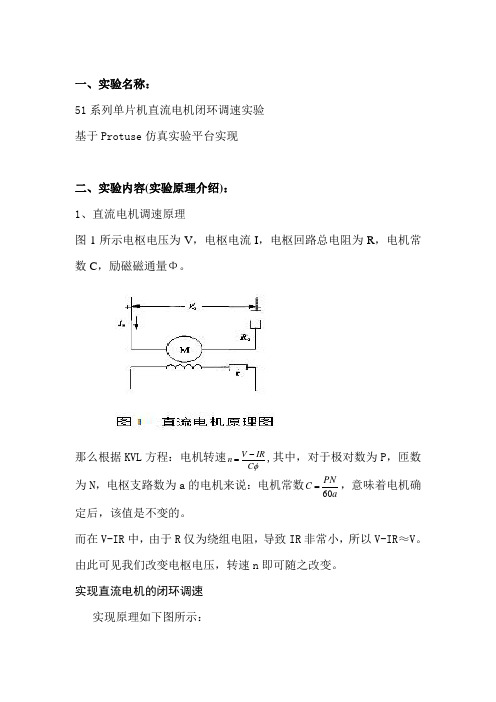
一、实验名称:51系列单片机直流电机闭环调速实验 基于Protuse 仿真实验平台实现二、实验内容(实验原理介绍): 1、直流电机调速原理图1所示电枢电压为V ,电枢电流I ,电枢回路总电阻为R ,电机常数C ,励磁磁通量Φ。
那么根据KVL 方程:电机转速φC IR V n -=,其中,对于极对数为P ,匝数为N ,电枢支路数为a 的电机来说:电机常数aPN C 60=,意味着电机确定后,该值是不变的。
而在V-IR 中,由于R 仅为绕组电阻,导致IR 非常小,所以V-IR ≈V 。
由此可见我们改变电枢电压,转速n 即可随之改变。
实现直流电机的闭环调速 实现原理如下图所示:2、测速软件设计Array图12 软件测速的方框图/****T1中断服务程序********单位时间(S)方波的个数*************/void time1_int(void) interrupt 3{count_speed++; if(count_speed == 20) { count_speed = 0;num_display = num_medium; num_medium = 0; }}3、PID 算法的数字实现由于DDC (Direct Digital Control )系统是一种时间离散控制系统。
因此,为了用微机实现(式3-1-1)必须将其离散化,用数字形式的差分方程来代替连续系统的微分方程。
离散化的PID 表达式为:[]⎭⎬⎫⎩⎨⎧--++=∑=nj DIP n e n e T T j e T T n e K n P 0)1()()()()( (式3-1-2)式中,T ——采样周期;P n ()——第n 次采样时微机输出;e n ()——第n 次采样时的偏差值;e n ()-1——第n-1次采样时的偏差值;n ——采样序号,n =0,1,2,…。
通常把(式3-1-2)称为PID 的位置控制算式。
根据(式3-1-2)可以进一步推导出离散化的位置型PID 编程表达式,如(式3-1-3):第K 次采样PID 的输出式为:P K P K P K P K P I D ()()()()=++(式3-1-3)其中,设[]⎪⎪⎩⎪⎪⎨⎧--=-+=+===∑∑==)1()()()1()()()()()()()(00K E K E K K P K P K E K j e K K E K j E K K P K E K K P D DK j I I I I K j I I P P 式中,K TT K K T T K I I PD DP=----=----积分系数;微分系数。
实验六 数字PID 直流电机闭环调速控制系统设计
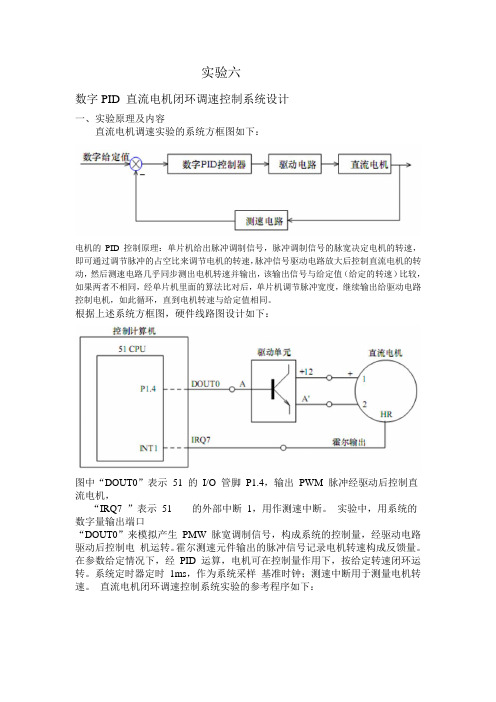
实验六数字PID 直流电机闭环调速控制系统设计一、实验原理及内容直流电机调速实验的系统方框图如下:电机的PID控制原理:单片机给出脉冲调制信号,脉冲调制信号的脉宽决定电机的转速,即可通过调节脉冲的占空比来调节电机的转速,脉冲信号驱动电路放大后控制直流电机的转动,然后测速电路几乎同步测出电机转速并输出,该输出信号与给定值(给定的转速)比较,如果两者不相同,经单片机里面的算法比对后,单片机调节脉冲宽度,继续输出给驱动电路控制电机,如此循环,直到电机转速与给定值相同。
根据上述系统方框图,硬件线路图设计如下:图中“DOUT0”表示51 的I/O 管脚P1.4,输出PWM 脉冲经驱动后控制直流电机,“IRQ7 ”表示51 的外部中断1,用作测速中断。
实验中,用系统的数字量输出端口“DOUT0”来模拟产生PMW 脉宽调制信号,构成系统的控制量,经驱动电路驱动后控制电机运转。
霍尔测速元件输出的脉冲信号记录电机转速构成反馈量。
在参数给定情况下,经PID 运算,电机可在控制量作用下,按给定转速闭环运转。
系统定时器定时1ms,作为系统采样基准时钟;测速中断用于测量电机转速。
直流电机闭环调速控制系统实验的参考程序如下:实验结果的推导:在模拟系统中,PID 算法的表达式为:])()(1)([)(dtt de T dt t e T t e K t P D i P ++=⎰(1) 由于计算机系统是一种采样控制,它只能根据采样时刻的偏差值来计算控制。
因此,在计算机系统中,必须对式(1)进行离散化处理,用数字形式的差分方程代替连续系统微分方程,此时积分项和微分项可用求和及增量式表示:∑∑⎰===∆=nj n j nj E T t j E dt t e 0)()()( (2)T k E K E t k E k E dt t de )1()()1()()(--=∆--≈ (3) 将式(2)和(3)带入式(1),则得到离散的PID 表达式:⎪⎩⎪⎨⎧⎭⎬⎫--++=∑=)]1()([)()()(0k E k E T T j E T T k E K k P Dnj i P 式中,T t =∆----采样周期,必须使T 足够小,才能使系统有一定的精度;E(k)---第k 次采样时的偏差值;E(k-1)---第(k-1)次采样时的偏差值; K---采样序号,k=0,1,2.P(k)---第k 次采样时调节器的输出。
基于Proteus仿真的直流电机调速设计

I Q ( ) : ( i — i o ) / K o { ( ) = K I 口 ( , ) 一 ( 1 2 ) + i R = O / K v + i R
一
) 去
( 2 )
是一 常数 , 为 电机工作 时内部线圈产生的反 向 电动 势 , 为 电机 端 电压 , 、 分 别为 速度 常数
Pr o t e u s s i mu l a t i o n s o f t wa r e r e li a z e P W M s p e e d c o n t r o l o f DC mo t o r .
Ke y wo r d s :DC mo t o r ;P W M;i n t e l l i g e n t v e h i c l e ;s i mu l a t i o n; DC s p e e d c o n t r o l
摘要 :为 了实现智 能小 车的精确控制 ,分析 了直 流电机模 型及其参数特性 , 讨 论了直流 电机调速方 法 ,在分析 P WM直流 电机
调速实现原理的基础 上,借助 P r o t e u s 仿真软件 实现直 流电机 的P WM调速 。
关键词 : 直 流电机 ;P WM;智能小车 ;仿真 ;直流调速
和 转矩 常数 。设 电机 的转 矩 、转 轴输 出功 率 效 率
分别为 Q 、P 、叼 ,可构建直流 电机模型为 :
数 特性 以及 P WM调速原 理 ,借助于 P r o t e u s 仿真
实现 P WM直 流 电机调 速 。
1 直 流 电机模 型分 析
直 流 电机 由转子 、定 子 、换 向器 等 组成 ,其 等效模 型如图 1 所 示 。 电 阻 R为 转 子 线 圈 内 阻 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OSTaskCreate(Task3, (void *)0, &Task3_TaskStk[TASK_STK_SIZE - 1], 1);
OSTaskCreate(Task4, (void *)0, &Task4_TaskStk[TASK_STK_SIZE - 1], 5);
OSTaskSuspend(0);
uC/COS 是一个完整的、可移植、可固化、可剪裁的占先式实时多任务内核.uC/COS 已经有很多产品成功使用的案例且得到美国军方的认证,说明了该系统的可靠性。uC/COS 源代码公开,代码短,源代码大部分是使用ANSI C 编写的,移植性和裁减性好,功能强大, 能可靠应用于各种控制系统中。
系统构成
//最大调节转速
#define Kp 0.7
//比例放大系数
#define Ts 0.03
//采样周期
#define t0 4
//积分时间常数
#define td 0.0005
//微分时间常数
#define q0 Kp*(1+Ts*t0+td/Ts)
#define q1 -Kp*(1+2*td/Ts)
PWMInit();
//PWM 初始化
while(1)
{ nj=IOPIN>>16;
nb=(float)nj/10;
//采样反馈转速
e=n-nb;
u=us+q0*e+q1*es+q2*es2; //PID 处理
if(u>=Umax)
u=Umax;
es2=es;
es=e;
us=u;
OSMboxPost(Conbox,(void*)&u); //发送处理后的信号
6.仿真结果
仿真 1.8 秒钟后得下图,可看到转速逐渐增大然后稳定下来。
增大转矩后,可看到转速下降后又恢复
7.程序;
1.系统主程序:main.c
/******************************************************************************
#define q2 Kp*td/Ts
#define ADC_DO 0x00000040
//P0.6
#define ADC_CS 0x00000080
//P0.7
#define ADC_CLK 0x00000100
//P0.8
#define ADC_DI 0x00000200
//0.9
OS_STK
基于 uC/COS 的直流电机 PID 转速闭环调速控制系统 Proteus 仿真实现
在工业自动控制系统和各种智能产品中常常会用用电动机进行驱动、传动和控制,而现 代智能控制系统中,对电机的控制要求越来越精确和迅速,对环境的适应要求越来越高。随 着科技的发展,通过对电机的改造,出现了一些针对各种应用要求的电机,如伺服电机、步 进电机、开关磁阻电机等非传统电机。但是在一些对位置控制要求不高的电机控制系统如传 动控制系统中,传统电机如直流电机乃有很大的优势,而要对其进行精确而又迅速的控制, 就需要复杂的控制系统。随着微电子和计算机的发展,数字控制系统应用越来越广泛,数字 控制系统有控制精确,硬件实现简单,受环境影响小,功能复杂,系统修改简单,有很好的 人机交换界面等特点。
在本仿真中LPC2106没加晶振电路,频率在芯片属性中设置。
3.液晶显示 本系统采用 Proteus 仿真库有的液晶显示模块 AMPIRE128X64,为 8192 像素的单色 LCD
屏幕分为两半控制,控制引脚为 CS1 和 CS2。数据通过移位寄存器输入。
4.电机驱动电路 本系统仿真的是最大输入电压为 12 伏的微型电机,故用通用电机驱动电路实现假设该电
}
/******************************************************************************
** 函数名称: Task1_Task
** 功能描述: 实时任务,负责采样和处理数据
******************************************************************************/
在电机控制系统开发中,常常需要消耗各种硬件资源,系统构建时间长,而在调试时很 难对硬件系统进行修改,从而延长开发周期。随着计算机仿真技术的出现和发展,可用计算 机对电机控制系统进行仿真,从而减小系统开发开支和周期。计算机仿真可分为整体仿真 和实时仿真。整体仿真是对系统各个时间段对各个对象进行计算和分析,从而对各个对象的 变化情况有直观的整体的了解,即能对系统进行精确的预测,如 Matlab 就是一个典型的实 时仿真软件。实时仿真是对时间点的动态仿真,即随着时间的推移它能动态仿真出当时系统 的状态。Proteus 是一个实时仿真软件,用来仿真各种嵌入式系统。它能对各种微控制器进 行仿真,本系统即用 Proteus 对直流电机控制系统进行仿真。
} /****************************************************************************** *************************** ** 函数名称: main ** 功能描述: c 语言的主函数,由它启动多任务环境 ******************************************************************************* *************************/ int main (void) {
转速控制输入 (0832 采样)
移植了 uC\COS 的 LPC2106 ARM 微控 制器
液晶显示 测速接口 PWM波
输入转矩
51 单 片 机仿真 的电机
电机驱 动电路
硬件全图
各子系统
1. 转速控制输入 如用按键输入则需要复杂的软件实现,并且需要足够的引脚资源,本系统用 ADC0832
采样电位器上的电压信号来实现转速信号输入。
void Task4(void *p_arg);
//函数声明
void PWMInit(void)
{
PWMPR = 0x00; PWMMCR = 0x02; PWMMR0 = 2765; PWMMR1 = 0; PWMLER = 0x03; PWMPCR = 0x0200; PWMTCR = 0x09; PWMMR0 = 2765; PWMMR1 = 0; PWMLER = 0x03;
OSTimeDlyHMSM(0,0,0,30);
}
}
/******************************************************************************
** 函数名称: Task2_Task
** 功能描述: 根据控制信号输出 PWM 波
******************************************************************************/
2.LPC2106 微控制器 LPC2106是Phlip公司推出的核心为ARM的控制器。LPC2106 包含一个支持仿真的
ARM7TDMI-S CPU、与片内存储器控制器接口的ARM7 局部总线、与中断控制器接口的 AMBA 高性能总线(AHB)和连接片内外设功能的VLSI 外设总线(VPB,ARMAMBA 总 线的兼容超集)。片内有64K 字节静态RAM和128K的FLASH存储器。可寻址4GB。
//各任务栈
OS_EVENT
*Conbox;
//控制信号邮箱
float n=0;
// 输入转速
float nb=0;
// 反馈转速
void Main_Task(void *data);
void Task1(void *p_arg);
void Task2(void *p_arg);
void Task3(void *p_arg);
路输入电阻为无穷大,输出电阻为 0。
5.仿真电机的 51 单片机 虽然 Proteus 有电机模块,但其电机模块没有输出转速接口故用一单片机代替它,单片机
用 ADC0832 采样输入的电压,经过处理即输出和真实电机同步的转速(需要大量的浮点运 算,可考虑用 DSP)。通过两个按键改变转矩没按一次增大或减小 0.001,上面的是增大。
Main_TaskStk[TASK_STK_SIZE];
OS_STK
Task1_TaskStk[TASK_STK_SIZE];
OS_STK
Task2_TaskStk[TASK_STK_SIZE];
OS_STK
Task3_TaskStk[TASK_STK_SIZE];
OS_STK
Task4_TaskStk[TASK_STK_SIZE];
#include "config.h"
#include "LCD.h"
#define TASK_STK_SIZE
512
//各任务栈大小
#define IO_Init()
\
PINSEL0= 2; \
IODIR|= 0x00007FB0;
//P0.4\P0.5\P0.7-P1.4 为输出其他的为输入
#define Umax 1000
**
实时微型直流电机 PID 转速闭环调速控制系统程序(基于移植于 LPC2106 上的
uc/cos 实时操作系统)
**
程序编写者: 吴斌
**
编写日期: 2007 年 11 月 14 日
******************************************************************************/