51单片机直流电机正反转程序
51单片机电机正反转控制程序

51单片机电机正反转控制程序以下是一个基于51单片机的电机正反转控制程序示例:#include <reg52.h>sbit motorPin1 = P0^0; // 电机接口1sbit motorPin2 = P0^1; // 电机接口2void delay(unsigned int delayTime) {unsigned int i, j;for(i=delayTime; i>0; i--)for(j=200; j>0; j--);}void motorClockwise() {motorPin1 = 1; // 电机接口1为高电平motorPin2 = 0; // 电机接口2为低电平delay(500); // 延时一段时间motorPin1 = 0; // 电机接口1为低电平motorPin2 = 0; // 电机接口2为低电平}void motorAnticlockwise() {motorPin1 = 0; // 电机接口1为低电平motorPin2 = 1; // 电机接口2为高电平delay(500); // 延时一段时间motorPin1 = 0; // 电机接口1为低电平motorPin2 = 0; // 电机接口2为低电平}void main() {while(1) {motorClockwise(); // 电机正转delay(1000); // 延时一段时间motorAnticlockwise(); // 电机反转delay(1000); // 延时一段时间}}以上代码中,我们通过定义两个sbit变量来表示电机接口1和接口2。
通过控制接口1和接口2的高低电平状态,可以控制电机的正反转。
在motorClockwise函数中,我们将接口1设置为高电平,接口2设置为低电平,电机开始正转;在motorAnticlockwise函数中,我们将接口1设置为低电平,接口2设置为高电平,电机开始反转。
51单片机直流电机反转

51单片机直流电机反转在现代工业生产中,直流电机作为一种重要的动力装置,广泛应用于各种机械设备中。
其中,电机的正反转控制是直流电机应用中的一个重要环节。
本文将以为主题,探讨其原理与实现方法。
直流电机是将电能转换为机械能的装置,其结构简单、运行可靠,在工业生产中应用广泛。
在很多情况下,需要对电机进行正反转控制,以满足不同的工作需求。
而使用51单片机进行直流电机反转控制,是一种简单有效的方法。
首先,我们需要了解直流电机的结构与工作原理。
直流电机主要由定子、转子和碳刷组成。
当定子上通入直流电流时,形成一个磁场,引起转子旋转。
电机的正反转实际上就是改变定子磁场方向的问题。
通过改变定子和转子之间的相对位置,可以实现电机的正反转。
在51单片机直流电机反转控制中,一般采用H桥驱动电路。
H桥电路由四个晶体管组成,可以实现电机的正反转控制。
通过控制H桥中各个晶体管的导通与断开,可以改变电机的正反转方向。
在实际应用中,需要根据具体需求设计合适的控制算法。
控制算法的设计涉及到脉宽调制、速度控制、位置控制等方面。
通过合理设计算法,可以实现对直流电机的精确控制。
另外,在51单片机直流电机反转控制中,还需要考虑到电机的保护问题。
在工作过程中,电机可能会出现过载、过热等情况,需要设置相应的保护装置,以保证电机的安全运行。
让我们总结一下本文的重点,我们可以发现,51单片机直流电机反转控制是一种简单有效的方法,通过合理设计控制算法和保护装置,可以实现对直流电机的精确控制。
在工业生产中,这种控制方法具有重要的应用价值,可以提高生产效率,降低能耗成本,值得进一步研究与推广。
用单片机控制直流电机正反转的系统设计

用单片机控制直流电机正反转的系统设计一、系统设计内容用单片机AT89C51控制直流电机正反转。
在此将由89C51的P2.0、P2.1通过晶体管控制继电器,当P2.0输出低电平,P2.1输出高电平时,三极管Q1导通,而三极管Q2截止,从而导致与Q1相连的继电器吸合,电机因两端产生电压而转动。
由P3.0、P3.1,P3.2控制电机的正转、反转和停止。
在图中,在两个继电器的两端都反向接了一个二极管,这非常重要,当使用电磁继电器时必须接。
原因如下:线圈通电正常工作时,二极管对电路不起作用。
当继电器线圈在断电的一瞬间会产生一个很强的反向电动势,在继电器线圈两端反向并联二极管就是用来消耗这个反向电动势的,通常将这个二极管称为消耗二极管,如果不加这个消耗二极管,反向电动势就会直接作用在趋动三极管上,很容易将三极管烧毁。
二、系统设计目标(1)掌握趋动电机正反转的电路。
(2)用PROTEUS实现电机正反转电路的设计,进行实时交互仿真。
三、系统设计步骤1、PROTEUS电路设计实现用单片机A T89C51控制直流电机正反转原理图,如图所示。
(1)选取元器件:①单片机:A T89C51②电阻:RES③直流电机:MOTOR④按钮:BUTTON⑤三极管:NPN⑥继电器:RELAY⑦二极管:DIODE(2)放置元器件、放置电源和地、连线、元器件属性设置。
直流电机正反转的原理如图所示,整个电路设计操作都在ISIS平台中进行。
关于元器件属性的设置在此实例中需要特别注意:①三极管基极的限流电阻更改为1KΩ。
②双击电机图标,弹出如图所示的电机属性对话框,在Nominal V oltage 一栏中将默认值改为5V。
双击继电器图标,在弹出如图所示的继电器属性对话框中,在Component Value 一栏中将默认值更改为5V。
2、源程序设计与目标代码文件生成1)程序流程图2)源程序设计①汇编语言源程序:ORG 0000HLJMP MAINORG 0030HMAIN: MOV A,P3ANL A,#07HCJNE A,#6,PZZMOV P2,#01HLCALL DELAYAJMP MAINPZZ: CJNE A,#5,PFZMOV P2,#02HLCALL DELAYAJMP MAINPFZ: CJNE A,#3,MAINMOV P2,#03HLCALL DELAYDELAY: MOV R5,#195C1: MOV R6,#255DJNZ R6,$DJNZ R5,C1RETEND3、PROTEUS仿真加载目标代码文件俺,双击编辑窗口的A T89C51器件,在弹出属性编辑对话框Program File 一栏中单机打开按钮,出现文件浏览对话框,找到dianji.hex文件,单机“打开”按钮,完成添加文件。
51单片机控制直流电机调速系统流程图:

51单片机控制直流电机调速系统流程图:
题目:单片机控制直流电机调速系统——软件设计
1. 编一段显示程序分别显示当前的转速和我们所需要的转速。
显示用4段数码管来实现。
2:编一段PWM调速的程序,来控制脉冲的宽度从而来控制电机的转速。
3:通过霍尔传感器测速,利用霍尔把信号传给单片机,单片机利用计数器的功能来记录转速,并同时把转速用数码管显示出来。
4:由于真实的转速和我们所设订的转速可能存在很大的误差,所以要编一段PID调速的程序,通过PID调节来减少误差。
5.要3个按键,键1实现设定转速的功能,键2实现切换功能(从所设定的转速切换到真实的转速的显示,键3实现开关的功能。
51单片机按键控制步进电机加减速及正反转
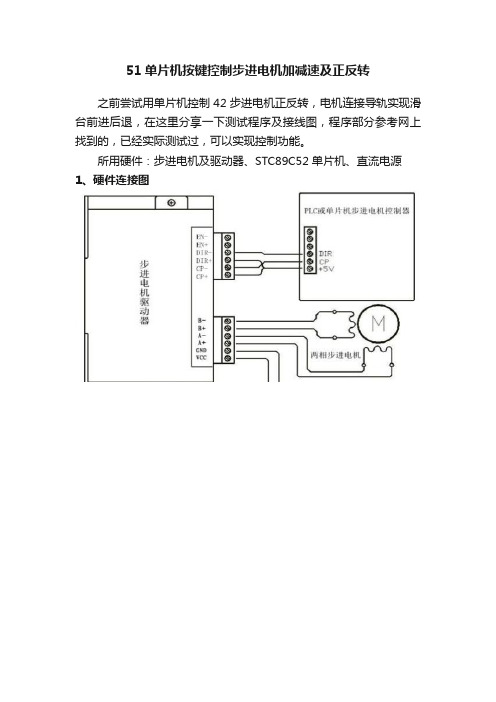
51单片机按键控制步进电机加减速及正反转之前尝试用单片机控制42步进电机正反转,电机连接导轨实现滑台前进后退,在这里分享一下测试程序及接线图,程序部分参考网上找到的,已经实际测试过,可以实现控制功能。
所用硬件:步进电机及驱动器、STC89C52单片机、直流电源1、硬件连接图•注意:上图为共阳极接法,实际连接参考总体线路连接。
•驱动器信号端定义:PUL+:脉冲信号输入正。
( CP+ )PUL-:脉冲信号输入负。
( CP- )DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
•电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
•电源连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.•总体线路连接输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
输入信号接口有两种接法,可根据需要采用共阳极接法或共阴极接法。
在这里我采用的是共阴极接法:分别将PUL-,DIR-,EN-连接到控制系统的地端(接入单片机地端);脉冲输入信号通过PUL+接入单片机(代码中给的P2^6脚),方向信号通过DIR+接入单片机(代码中给的P2^4脚),使能信号通过EN+接入(不接也可,代码中未接,置空)。
按键连接见代码,分别用5个按键控制电机启动、反转、加速、减速、正反转。
注意:接线时请断开电源,电机接线需注意不要错相,相内相间短路,以免损坏驱动器。
2、代码1.#include<reg51.h>2.#define MotorTabNum 53.unsigned char T0_NUM;4.sbit K1 = P3^5; // 启动5.sbit K2 = P3^4; // 反转6.sbit K3 = P3^3; // 加速7.sbit K4 = P3^2; // 减速8.sbit K5 = P3^1; //正反转9.10.sbit FX = P2^4; // 方向11.//sbit MotorEn = P2^5; // 使能12.sbit CLK = P2^6; // 脉冲13.14.inttable[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40};15.16.unsigned char g_MotorSt = 0; //17.unsigned char g_MotorDir = 0; //18.unsigned char MotorTab[7] = {12, 10, 8, 6, 4, 2,1};19.20.signed char g_MotorNum = 0;21.22.void delayms(xms);23.void mDelay(unsigned int DelayTime);24.void T0_Init();25.26.void KeyScan(void);27.28.29.30.void main(void)31.{32.T0_Init();33.// MotorEn = 0; //34.FX = 0;35.while(1)36.{37.KeyScan(); //38.}39.40.41.}42.43.void T0_Init()44.{45.TMOD = 0x01;46.TH0 = (65535-100)/256; // 1ms47.TL0 = (65535-100)%256;48.EA = 1;49.ET0 = 1;50.// TR0 = 1;51.52.}53.54.void T0_time() interrupt 155.{56.// TR0 = 0;57.TH0 = (65535-100)/256;58.TL0 = (65535-100)%256;59.T0_NUM++;60.if(T0_NUM >= MotorTab[g_MotorNum]) //61.{62.T0_NUM = 0;63.CLK=CLK^0x01; //64.}65.// TR0 = 1;66.}67.68.69.//--------------------------70.void KeyScan(void)71.{72.if(K1 == 0)73.{74.delayms(10);75.if(K1 == 0)76.{77.g_MotorSt = g_MotorSt ^ 0x01;78.// MotorEn ^= 1;79.TR0 = 1;80.FX ^= 0; //反转81.}82.}83.84.if(K2 == 0)85.{86.delayms(10); //正转87.if(K2 == 0)88.{89.g_MotorDir = g_MotorDir ^ 0x01;90.FX ^= 1; //加速91.}92.}93.94.if(K3 == 0) //95.{96.delayms(5); //加速97.if(K3 == 0)98.{99.g_MotorNum++;100.if(g_MotorNum > MotorTabNum) 101.g_MotorNum = MotorTabNum; 102.}103.}105.if(K4 == 0) //106.{107.delayms(5); // 减速108.if(K4 == 0)109.{110.g_MotorNum--;111.if(g_MotorNum < 0)112.g_MotorNum = 0;113.}114.}115.116.if(K5 == 0) //117.{118.delayms(10); // 正反转119.if(K5 == 0)120.{121.g_MotorSt = g_MotorSt ^ 0x01; 122.g_MotorDir = g_MotorDir ^ 0x01; 123.MotorEn ^= 1;124.TR0 = 1;125.while(1)126.{127.FX ^= 1; //128.delayms(90000);129.FX ^= 0; //130.delayms(90000);131.}132.}133.}135.136.void delayms(xms)//延时137.{138.unsigned int x,y;139.for(x=xms;x>0;x--)140.for(y=110;y>0;y--);141.}3、常见问题解答•控制信号高于5v一定要串联电阻,否则可能会烧坏驱动器控制接口电路。
51单片机实现直流电机简易驱动

/*本程序主要实现让直流电机正反转,没有其他特殊功能,没有使用定时器中断全速运行直流电机不可调速程序可以在keil2中调试出来*/#include<reg52.h>//定义所有需要使用的引脚sbit BT0=P2^0;sbit BT1=P2^1;sbit BT2=P2^2;sbit PW1=P1^0;sbit PW2=P1^1;sbit left=P0^0;sbit right=P0^1;sbit stop=P0^2;void motor(); // 功能函数,实现大部分功能void leftM(); // 电机左转void rightM(); // 电机右转void stopM(); // 电机停止//延时函数void DelayUs2x(unsigned char t);void DelayMs(unsigned char t);void main(){motor();}void motor(){while(1) //死循环一直让电机转动{//一次防抖动,下面按键这边if(!BT0) // 判断是否按下{DelayMs(10); //延时一段时间防抖动if(!BT0) //确定按下按键了{while(!BT0);// 如果手一直为松开,这边则死循环一直等待松开leftM();left = 0;right = 1;stop = 1;}}//同上if(!BT1){DelayMs(10);if(!BT1){while(!BT1);rightM();left = 1;right = 0;stop =1;}}//同上if(!BT2){DelayMs(10);if(!BT2){stopM();left = 1;right = 1;stop = 0;}}}}//电机左转void leftM(){PW1 = 0;PW2 = 1;}//电机右转void rightM(){PW1 = 1;PW2 = 0;}//电机停止函数void stopM(){PW1 = 0;PW2 = 0;}//延时防抖动void DelayUs2x(unsigned char t) {while(--t);}void DelayMs(unsigned char t) {//延时1mswhile(t--){DelayUs2x(245);DelayUs2x(245);}}。
单片机控制的直流电机正反转和加速减速C程序

单片机控制的直流电机正反转和加速减速C程序简介本文档旨在向读者介绍如何使用单片机控制直流电机实现正反转和加速减速功能的C程序。
程序实现正反转控制以下是控制直流电机正反转的C程序示例:include <avr/io.h>void motor_forward(){// 设置引脚控制直流电机正转}void motor_reverse(){// 设置引脚控制直流电机反转}int main(){// 初始化单片机引脚设置和其他必要的配置while (1){// 检测是否需要正转或反转,根据需要调用motor_forward()或motor_reverse()函数}return 0;}加速减速控制以下是控制直流电机加速减速的C程序示例:include <avr/io.h>void motor_speed_up(){// 调整引脚控制直流电机的占空比以加速电机转速}void motor_slow_down(){// 调整引脚控制直流电机的占空比以减速电机转速}int main(){// 初始化单片机引脚设置和其他必要的配置while (1){// 检测是否需要加速或减速,根据需要调用motor_speed_up()或motor_slow_down()函数}return 0;}结论通过上述示例程序,我们可以实现通过单片机控制直流电机的正反转和加速减速功能。
读者可以根据实际需求进行相应的参数调整和功能扩展。
请注意,上述示例程序仅为演示目的,具体的引脚配置和控制方式需根据实际硬件和单片机型号进行调整。
直流电机正反转程序

#include <reg51.h>#include"lcd.h"#include <intrins.h>#define uint unsigned intunsigned char Key_Scan();#define GPIO_LED P3 //led使用P3口//--定义全局变量--//unsigned char PuZh1[]="status: foreward"; //正转unsigned char PuZh2[]="status:inversion"; //反转unsigned char PuZh3[]=" stop "; unsigned char PuZh4[]="";sbit a=P1^0;sbit c=P1^1;sbit d=P1^2;sbit e=P1^3;sbit K1=P1^5;sbit K2=P1^7;sbit K3=P1^6;void Delay10ms(unsigned int c); //延时10msvoid motorzheng(void)//正转{a=0;c=1;d=1;e=0;Delay10ms(100);}void motorting(void)//电机停止{a=0;c=0;d=0;e=0;Delay10ms(100);}void motorfan(void)//反转{a=1;c=0;d=0;e=1;Delay10ms(100);}void main(){while(1){unsigned char ledValue, keyNum,i;keyNum = Key_Scan(); //扫描键盘if(keyNum==1){ LcdInit(); //初始化显示屏for(i=0;i<16;i++){ LcdWriteCom(0x80+i);LcdWriteData(PuZh1[i]);LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh4[i]);} //lcd显示正转GPIO_LED = ledValue;motorzheng();}if(keyNum==2){ LcdInit(); //初始化显示屏for(i=0;i<16;i++){ LcdWriteCom(0x80+i);LcdWriteData(PuZh2[i]);LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh4[i]);} //lcd显示反转GPIO_LED = ledValue;motorfan();}if(keyNum==3){ LcdInit(); //初始化显示屏for(i=0;i<16;i++){ LcdWriteCom(0x80+i);LcdWriteData(PuZh3[i]);LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh4[i]);}GPIO_LED = ledValue;motorting();}}}unsigned char Key_Scan(){unsigned char keyValue = 0 , i; //保存键值//--检测按键1--//if (K1==0) //检测按键K1是否按下{Delay10ms(1); //消除抖动if (K1==0) //再次检测按键是否按下{keyValue = 1;i = 0;while ((i<10) && (K1==0)) //检测按键是否松开{Delay10ms(1);i++;}}}if (K3==0) //检测按键K1是否按下{Delay10ms(1); //消除抖动if (K3==0) //再次检测按键是否按下{keyValue = 3;i = 0;while ((i<10) && (K1==0)) //检测按键是否松开{Delay10ms(1);i++;}}}//--检测按键2--//if (K2==0) //检测按键K2是否按下{Delay10ms(1); //消除抖动if (K2==0) //再次检测按键是否按下{keyValue = 2;i = 0;while ((i<10) && (K2==0)) //检测按键是否松开{Delay10ms(1);i++;}}}return keyValue; //将读取到键值的值返回}void Delay10ms(unsigned int c) //延时{unsigned char a, b;for (;c>0;c--){for (b=38;b>0;b--){for (a=130;a>0;a--);} } }。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机直流电机正反转程序
在工业自动化、机器人、电子设备等领域,直流电机是一种常见的电动机。
直流电机具有结构简单、转速范围广、转矩大、控制方便等优点,因此被广泛应用。
在直流电机的控制中,正反转是一种常见的操作。
本文将介绍如何使用51单片机控制直流电机的正反转。
1. 直流电机的原理
直流电机是一种将电能转化为机械能的电动机。
它的基本结构由定子、转子、电刷和电枢组成。
当电枢通电时,电枢内部会产生磁场,与定子磁场相互作用,从而产生转矩,使转子转动。
电刷则用来改变电极的极性,使电极的磁场方向与定子磁场方向相互作用,从而使电机正反转。
2. 51单片机控制直流电机的原理
51单片机是一种常用的微控制器,具有体积小、功耗低、易于编程等优点。
在控制直流电机时,我们可以使用51单片机来控制电机的正反转。
具体实现方法是通过控制电机的电极极性来改变电机的转向。
3. 51单片机直流电机正反转程序
下面是一段使用51单片机控制直流电机正反转的程序:
#include <reg52.h>
sbit IN1 = P1^0; //定义IN1引脚
sbit IN2 = P1^1; //定义IN2引脚
void delay(unsigned int t) //延时函数 {
unsigned int i, j;
for(i=0; i<t; i++)
for(j=0; j<125; j++);
}
void main()
{
while(1)
{
IN1 = 1; //IN1引脚输出高电平 IN2 = 0; //IN2引脚输出低电平 delay(1000); //延时1秒
IN1 = 0; //IN1引脚输出低电平 IN2 = 1; //IN2引脚输出高电平 delay(1000); //延时1秒
}
```
上述程序中,我们使用了P1口的0、1引脚来控制电机的正反转。
当IN1引脚输出高电平、IN2引脚输出低电平时,电机正转;当IN1引脚输出低电平、IN2引脚输出高电平时,电机反转。
程序中的delay函数用来延时,以便观察电机的转向。
4. 总结
本文介绍了如何使用51单片机控制直流电机的正反转。
通过控制电机的电极极性来改变电机的转向,实现了电机的正反转。
在实际应用中,我们可以根据需要修改程序,实现更加复杂的控制功能。