控制系统的方块图
闭环控制系统方框图10例
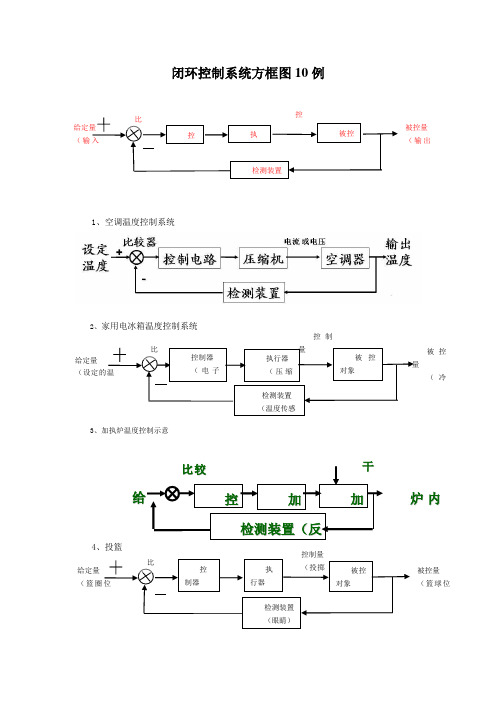
闭环控制系统方框图10例
1、空调温度控制系统
2、家用电冰箱温度控制系统
3、加执炉温度控制示意
4
+
给
定量
控
制器
加
热器
加
热炉
炉内
温度
比较
器
检测装置(反
馈)
-
干
扰
控执被控
被控量
(输出
给定量
(输入
检测装置控
比
控制器
执
行器
被控
对象
被控量
(篮球位
给定量
(篮圈位
检测装置
(眼睛)控制量(投掷
比控制器
(电子
执行器
(压缩
被控
对象
被控
量
(冷
藏室温度)
给定量
(设定的温
检测装置
(温度传感
控制量
比
5、供水水箱的水位自动控制系统
6、抽水马桶的自动控制系统
7、花房温度控制系统
8、宾馆使用多台热水器串联电辅助加热自动控制系统
9、粮库温、湿度自动控制系统
被控量 (水箱水
给定量 (设定的水
被控量 (水箱水
给定量
给定量 (设被控量 (花房
控制
被控量 (
水
给定量 (设定控制量 被控
(粮(的温、控制量
10、自动电热水壶控制系统
控制量
(水。
闭 环控制系统方框图-12例

闭环控制系统方框图12例2、投篮\3、供水水箱的水位自动控制系统给定量被控量给定量 被控量给定量4、加热炉的温度自动控制系统--------------------------------------------------------------------------------------------5、抽水马桶的自动控制系统--------------------------------------------------------------------------------------------6、花房温度控制系统--------------------------------------------------------------------------------------------7、夏天房间温度控制系统被控量给定量被控量给定量给定量被控量房内实给定量被控量控制量8、家用电饭锅保温控制系统--------------------------------------------------------------------------------------------9、家用电冰箱温度控制系统--------------------------------------------------------------------------------------------10、宾馆使用多台热水器串联电辅助加热自动控制系统--------------------------------------------------------------------------------------------11、粮库温、湿度自动控制系统被控量给定量 控制量被控量 冰箱实给定量 给定量被控量—80℃) 控制量被控量 粮库内给定量(设定控制量--------------------------------------------------------------------------------------------12、自动保温电热水壶控制系统--------------------------------------------------------------------------------------------注:闭环控制方框图中括号()内的内容为设计方框图时所必须写的,而括号外文字的只是对括号内的注解,但题目要求指明时也必须写出。
自动控制原理方框图

[注意]:
相临的信号相加点位置可以互换;见下例
X1(s)
X2(s)
X3(s)
Y (s)
X1(s)
X3(s)
X 2 (s)
Y (s)
同一信号的分支点位置可以互换:见下例
X1(s)
X (s) G(s) Y (s)
X 2 (s)
X (s) G(s) Y (s)
X 2 (s)
X1(s)
相加点和分支点在一般情况下,不能互换。
§2-3 控制系统的结构图与信号流图
一、结构图的组成和绘制
1、结构图的组成 由四种基本图形符号组成
(1)函数方块
R(s) r(t) G(s)
C(s) c(t)
(2)信号线
R(s) r(t)
(3)分支点(引出点)
R(s) r(t)
R(s) r(t) R(s) r(t)
(4)综合点(比较点或相加点)
R(s)
R
R1Cs
2I
2
(s)
UI (cs)(s)
R2
R1
Uc (s)
U c (s)
I1 (s)
Uc (s)
几点说明:
(1)在结构图中,每一个方框中的传递函数都应是考虑了负 载效应后的传递函数。
(2)描述一个系统的结构图不是唯一的,选择不同的中间变 量得到不同的结构图;
(3)结构图中的方框与实际系统的元部件并非一定是一一对 应的;
X1(s) G(s) X2(s) N(s)
Y (s)
N(s) ? Y (s) [X1(s) X 2 (s)]G(s), 又 : Y (s) X (s)1G(s) X 2 (s)N(s), N(s) G(s)
把相加点从环节的输出端移到输入端:
自动控制原理控制系统的结构图

比较点后移
R(s)
G(s)
比较点前移
+
Q(s)
C(s)
R(s)
+
C(s) G(s)
比较点后移
Q(s)
R(s)
+
C(s) G(s)
Q(s)
C(s) R(s)G(s) Q(s)
[R(s) Q(s) ]G(s) G(s)
R(s)
C(s) G(s)
+
Q(s)
G(s)
C(s) [R(s) Q(s)]G(s)
R(s)G(s) Q(s)G(1s6 )
(5)引出点旳移动(前移、后移)
引出点前移
R(s)
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
将 C(s) E(s)G(s) 代入上式,消去G(s)即得:
E(s) R(s)
1
H
1 (s)G(s)
1
1 开环传递函数
31
N(s)
+ E(s)
++
C(s)
R(s)
G1(s)
G2 (s)
-
B(s)
H(s)
(1)
打开反馈
C(s) R(s)
1
G(s) H (s)G(s)
前向通路传递函数 1 开环传递函数
注意:进行相加减旳量,必须具有相同旳量纲。
X1 +
+
X1+X2 R1(s)
控制系统的方块图及其基本组成
Υ Υ
1
3
-
Υ 1-Υ 2+Υ 3
-
Υ2
R2 (s)
图2-15比较点示意图
Υ2
注意:进行相加减的量,必须具有相同的量刚。 (3)分支点(引出点、测量点)Branch Point 表示信号测量或引出的位置 C(s) 注意:同一位置引出的信号 R(s) P(s) G1 (s) G2 (s) 大小和性质完全一样。
注意:由于N(s)极性的随机性,因而在求E(s)时,不能认
为利用N(s)产生的误差可抵消R(s)产生的误差。 2.4.3 方块图的绘制 (1)考虑负载效应分别列写系统各元部件的微分方程或传递 函数,并将它们用方框(块)表示。 (2)根据各元部件的信号流向,用信号线依次将各方块连接 起来,便可得到系统的方块图。 系统方块图-也是系统数学模型的一种。
**
R(s)
+ -
E(s)
G1 (s)
+
+
G2 (s)
C(s)
B(s)
H(s)
打开反馈
N(s)
G1 (s)
G2 (s)
C(s)
H(s)
图2-18 输出对扰动的结构图 利用公式**,直接可得:
M N ( s) G2 ( s ) C ( s) N ( s) 1 G( s) H ( s)
(7)误差对扰动的传递函数 假设R(s)=0
(4)闭环传递函数 Closed-loop Transfer Function 假设N(s)=0 输出信号C(s)与输入信号R(s)之比。
G1 ( s)G2 ( s) C ( s) G( s) R( s) 1 H ( s)G( s) 1 H ( s)G( s)
自动控制原理第二章方框图
R1C2s
(R1C1s 1)(R2C2s 1) R1C2s
(R1C1s 1)(R2C2s 1)
解法二:
ui (s)
-
1 I1(s) - 1 u(s)
R1
I (s) C1s
-
1
1 uo (s)
R2 I2(s) C2s
ui (s) 1
R1
ui (s) 1
R1
-
1
-
C1s
1 R1
-
1
-
C1s
1 R1
1
自动控制原理第二章方框图自动控制方框图闭环控制系统方框图串级控制系统方框图前馈控制系统方框图控制系统方框图单回路控制系统方框图过程控制系统的方框图自动调节系统方框图控制方框图
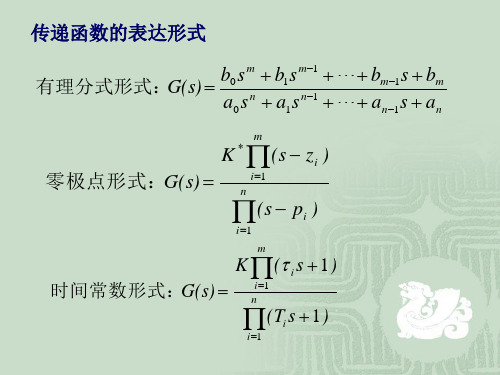
传递函数的表达形式
有理分式形式:G(s)
b0 s m a0 s n
b1s m1 a1s n1
bm1s an1s
bm an
H3
相加点移动 G3 G1
G3 G1
向同无类用移功动
G2
错!
G2
H1
G(s) G1G2 G2G3 1 G1G2 H1
G2
G1 H1
总的结构图如下:
ui (s)
-
1 I1(s) - 1 u(s)
R1
I (s) C1s
-
1
1 uo (s)
R2 I2(s) C2s
ui (s)
-
C2s
1 I1(s) - 1 u(s)
X 2 (s)
X (s) G(s) Y (s)
X 2 (s)
X1(s)
相加点和分支点在一般情况下,不能互换。
X 3 (s)
X (s)
《控制系统框图》课件
总结词
掌握绘制框图的正确方法是学习控制系统框图的关键。
详细描述
在绘制控制系统框图时,需要遵循一定的规则和步骤。首先,确定系统中的各个组成部分,并为其分配相应的方框。然后,根据各部分之间的相互关系,使用箭头将它们连接起来,箭头方向表示信号或信息的流向。为了使框图更加清晰易懂,可以使用不同的符号或标记来表示不同类型的框图元素。
《控制系统框图》ppt课件
目录
控制系统概述控制系统框图基础控制系统框图的实例分析控制系统框图的优化与改进控制系统框图的应用与发展
01
CHAPTER
控制系统概述
03
控制系统的性能指标包括稳定性、快速性、准确性和鲁棒性等。
01
控制系统是由控制器和被控对象组成的,通过改变被控对象的输入信号,使得被控对象的输出信号达到期望的输出值。
03
CHAPTER
控制系统框图的实例分析
总结词
描述了温度控制系统的组成和工作原理,包括温度传感器、控制器、加热器和冷却器等部件。
详细描述
温度控制系统框图包括温度传感器、控制器、加热器和冷却器等部件。温度传感器负责检测当前温度,并将信号传输给控制器。控制器根据设定温度与实际温度的差值,输出控制信号给加热器或冷却器,以调节温度。
交通管理
通过控制系统框图,实现农业设备的自动化控制,提高农业生产效率。
农业自动化
A
B
C
D
THANKS
感谢您的观看。
总结词
学会解读和分析框图是学习控制系统框图的重要目标。
要点一
要点二
详细描述
在掌握绘制方法的基础上,学会解读和分析控制系统框图是至关重要的。通过解读框图,可以了解系统的整体结构和各部分的功能,分析系统的工作原理和控制逻辑。同时,还可以通过分析框图来评估系统的性能、稳定性以及可能存在的问题。在分析过程中,需要运用相关的控制理论知识,如开环与闭环控制、稳定性分析等。
串级控制系统通用方块图
§7-1 串级控制系统
一、串级控制系统的结构 管式加热炉是石化工业中的重要装置之一,工艺上要求被加热 油料炉出口温度的波动范围应控制±2℃内。
3
主要扰动:
(1)原料方面的扰动(包括物料的流量和入口温度的变化);
(2)燃料方面的扰动(包括燃料的流量、热值及压力的波动);
(3)燃烧条件方面的扰动(包括供风量和炉膛漏风量的变化、燃
助变量。 炉出口温度
炉膛温度
7
主对象 — 由主变量表征其主要特征的工艺设备或过 程,其输入量为副变量,输出量为主变量。
副对象 — 由副变量表征其特性的工艺生产设备或过 程,其输入量为系统的操纵变量,输出量为副变量。 炉出口温度对象
炉膛温度对象
8
主控制器 — 按主变量的测量值与给定值的偏差进行 工作的控制器,其输出作为副控制器的 给定值。
副控制器 — 按副变量的测量值与主控制器的输出信 号的偏差进行工作的控制器,其输出直 接控制执行器的动作。
炉出口温度控制器
炉膛温度控制器
9
主回路 — 由主测量变送器、主控制器、副回路等效 环节和主对象组成的闭合回路,又称外环 或主环。
副回路 — 由副测量变送器、副控制器、执行器和副 对象所组成的闭合回路,又称内环或副环。
第7章 复杂控制系统
31 串级控制系统
2 比值控制系统 3 前馈控制系统 4 均匀控制系统 5 分程控制系统 6 选择性控制系统 7 多冲量控制系统
1
第7章 复杂控制系统
复杂控制系统 ➢凡是结构上比单回路控制系统复杂或控制目的较 特殊的控制系统,都称为复杂控制系统。
特点: ➢通常包含有两个以上的变送器、控制器或者执行 器,构成的回路数也多于一个,所以,复杂控制系 统又称为多回路控制系统。
3.3 控制系统的方框图与化简
s s
Y2 s U s
G1s G2 s
n
n各环节并联后的总传函为 Gs i1Gi s
§3.3 控制系统的方框图与化简
p
0.2
q
3s 1.25
ve
4
y
s 1.25
2s 0.5 5s 2
试求下列传函:
10 z
s
1). 从e到y
2). 从p到y
Y1(s+) Y(s) +
Y2(s)
Es Gs Ys
H s
U(s) G1(s) + G2(s) Y(s)
U(s) G(s)
Y(s)
1 G(s)H (s)
§3.3 控制系统的方框图与化简
2、比较点(相加点)的变位移动
U1(s)
G
U1(s) Y(s)
G
Y(s)
U2(s)
G
Y s U1s U2sGs
H s N s
Hs N s
§3.3 控制系统的方框图与化简
例题讲解
布置作业
本节要求:
1、要求能掌握方框图化简的方法 2、根据具体情况,灵活应用
例题:
作业:P72,习题3-2、3-5、3-7和3-9任选 (用方框图变换法求解)
3-2:
C(s)
G1G2
R(s) 1 G2H2 G1G2H3
3-9: C(s)
G1G2G3G4
R(s) 1 G1G2G3G4 G3G4H2 G2G3H1
求题图所示系统的传递函数C(s)/R(s)。
3). 从e到z
4). 从q到y
5). 从p到q
6). 从v到y
§3.3 控制系统的方框图与化简
控制系统框图
控制系统框图
一个控制系统框图通常包括输入、输出、控制器和反馈四个主要组成部分。
下面是一个简单的控制系统框图示例:
```
_________
| |
----->| |
u | |
----->| 控制器 |
| |
----->| |-----> y
|_________|
|
↓
反馈
```
1
其中,输入(u)是控制系统的一个或多个输入信号,代表系统的期望目标或要求。
控制器接收输入信号,并根据设定的算法或逻辑进行处理,输出一个或多个控制信号。
这些控制信号(y)作为输出,作用于要控制的对象,例如机器、电动机等,使其按照期望的方式工作。
同时,控制系统还通过反馈信号(通常是系统输出的测量值)获取对系统状态的实时信息,以便控制器能够根据反馈信息调整控制信号,使系统能够更好地达到期望目标。
当然,这只是一个简单的示例,实际的控制系统框图可能更加复杂,涉及到更多的输入、输出和控制器。
2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统的方块图
为了能清楚地说明控制系统各元件间的作用关系或信号传递关系,可用方块团来描述系统。
所谓方块图,就是用若干方块表示系统中的每一个元件,按系统中各信号作用的顺序,用信号线(带有箭头的直线)将方块连接起来的图形。
图中,系统的物理量(即信号),如电流、电压、温度、压力、位移、速度等,标注在信号线上。
每个方块的输入,即为输入至该元件的作用量;方块的输出,则为该元件受到输入作用后的响应。
使用方块图不仅有助于分析控制系统的工作原理,也便于建立控制系统的数学模型。
例如,根据图自动恒温控制系统的工作原理,可以绘制其方块图如图所示。
图中,符号“O”表示比较元件或比较器(也可用符号“@”表示),它将温度测量装置测量出的实际温度与给定温度进行比较,比较结果即为误差信号。
其中,“一”号或“十”号表示信号极性,即信号在此进行减法或加法运算。
图1中比较元件的输出即为实际温度与给定温度的差值,它既是系统的偏差(或误差)信号,也是温度控制器的输入员。
cjmc%ddz
1.3 自动控制系统的基本控制方式自动控制系统的组成千差万别,所完成的控制任务也不尽相同,但基本的控制方式是开环控制是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程开环控制方式组成的系统称为开环控制系统,其方块图如图1.5所示。
图1.6
所示为直流电动机开环调速系统原理团。
电位器输出电压Mr经触发装置和晶间管整流器构成的晶闸管整流装置转换并放大为宽度可调的直流电压M2,作为直流电动机的电相电压,电动机带动负载以转速M旋转。
改变yr,即改变x8,从而改变了转速n。
图1.6中,输入量为给定电压ol,被控对象为负载,输出量为直流电动机转速n。
显见,电动机转速M由电位器控制,不同的电位器位置即给定电压9f,就有相应的电动机转速M与之对应*而转速n对电位器的控制作用(给定电压yr)没有影响。
但是,当晶闸管整流装置的特性发生变化或负载力矩发生变化时(相当于系统受到扰动),即使电位器位置不变,即电压Mf不变,电动机的转速M也将变化。
根据以上分析,可绘制图1.6所示宜流电动机开环调速系统方块图如图1.7所示。
开环控制系统具有如下特点: (1)作用信号由输入量到输出量单方向传递,输出量对控制作用没有影响; (2)没有测量元件,系统必须精确地校准,对于输出可能出现的偏差没有修正能力,故控制精度NXP代理商较低; (3)出现干扰时有可能不能完成既定的工作; (4)系统不存在稳定性问题。
由于开环控制系统结构简单、调整方便、成本较低,因此被广泛应用在精度要求不高或扰动影响较小的场合。
常见的开环控制系统实例有:自动售货机、洗衣机、产品自动生产线、数控车床等。
闭环控制是指控制装置与被控对象之间既有倾向作用又有反向联系的控制过程,也称为反
馈控制。
由这种控制方式组成的系统称为闭环控制系统。
其方块图如图1.8所示。
将图1.8与因1.5比较可知,闭环控制系统在开环控制系统的基础上增加了测量元件,它将输出量检测出来,经过物理量的转换,再回送至输入端,与给定值(即输入量)进行比较,其差值即为偏差(或误差)信号,它是控制装置的输入量。
显见,系统中的作用信号按闭环传递时,系统的输出量对控制作用有直接影响,即系统有负反馈。
反馈是指取出输出量回送到输入端,并与输人量比较产生偏差〔或误差)的过程。
回送到输入端的信号称为反馈信号。
若反馈信号与输入信号极性相反,即两者相减,使产生的偏差越来越小,则此反馈称为负反馈(见图1.8);反之,则称为正反馈。
在图1.6所示直流ATMEL代理电动机开环调速系统中,增加直流测速发电机和放大器,就构成直流电动机闭环调速系统,如图1.9所示。
团中,直流测速发电机测量出电动机转速n,并转换成与n成正比的反馈电压Mt,再与给定电压Hr比较,产生偏差信号f=AM=Mr—Ml。
AM分别经过放大器放大以及晶闸管整流装置整流后,得到控制电压MI,它施加于电动机电抠两端,使电动机按预定转速带动负载转动。
图1.10所示为直流电动机闭环调速系统的方块图。
假设图1。
9所示系统在与给定电压Mf相对应的转速M状态下运行。
一旦系统受到扰动作用,如负载力矩增大或减小,而引起转速n下降或增加,即偏离给定值时,系
统会自动地产生一个调整过程,使转速恢复到给定值。
例如,当负载力矩减小导致转
速M增加时,上述调整过程如下:
由上可知,闭环控制系统具有如下特点:
(1)通过测量元件(即反馈AT89C2051元件)对输出量进行检测,即输出量对控制
作用有直接影响;
(2)应用负反馈减小输出量的实际值与给定值之问的偏差,以使系统的输出量趋于给定值;
(3)当出现扰动时,可减弱其对系统的影响;
(4)系统存在稳定性向题。
闭环控制也称为反馈控制,且周于偏差控制。
因此,反馈控制就是指采用负TI代理反馈并利用偏差进行控制的过程。
而反馈控制的原理为:按负反馈组成闭环系统,利用偏差减小或消除偏差。
自动控制理论主要研究闭环控制系统,因此,它所涉及的自动控制系统通常都是指闭环控制系统,亦即反馈控制系统。
复合控制
将开环控制与闭环控制相结合的控制方式称为复合控制。
这种控制方式是在闭环控制
的基础上,再附加一个按输入补偿或按扰动补偿的开环控制,该控制一般由按输入补
偿的补偿元件(即校正元件ATMEL代理商)或按扰动补偿的补偿元件组成。
由复合控制方式构成的系统称为复合控制系统,如图1.11(a)和(b)所示。